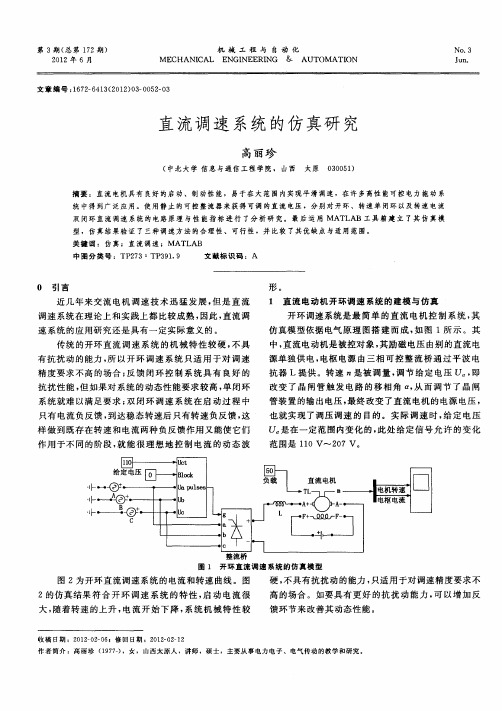
直流电动机开环调速系统仿真
直流调速系统的仿真研究
b
C
△
● — 1 I
—— -— — — —— —一 — —
整流桥
图 l 开 环 直 流 调 速 系 统 的 仿 真 模 型
图 为 开环 直流调 速系统 的电流和转 速 曲线 。图
硬 , 具有抗扰 动 的能力 , 不 只适用 于对调 速精度要 求不
高的场 合 。如 要具 有更 好 的抗 扰 动 能力 , 以增 加反 可 馈环节 来改善 其动 态性 能 。
统 中得 到 广 泛 应用 。使 用 静 止 的 可 控 整 流 器 来 获 得 可调 的 直流 电压 ,分 别 对 开 环 、转 速 单 闭环 以及 转速 电流 双 闭环 直 流 调 速 系 统 的 电路 原 理 与 性 能 指 标 进 行 了分 析 研 究 。 最 后 运 用 MA L T AB 工 具 箱 建 立 了其 仿 真 模 型 ,仿 真 结 果 验证 了三 种调 速 方 法 的合 理 性 、 可 行 性 ,并 比较 了其 优 缺 点 与 适 用 范 围 。
It J c
!压 电
0
Bk l o c
U b
Ul] as e ps u
LgI
8
・ ——
负 I 直 电 囹] 流 机 载 .
I
。
一
一
口
~
.
C 一 U c
J
l— 一 x 0 一 -0 一 V 一 O
… 、 ‘ . ■ 一 j J
第 3期 ( 第 12期 ) 总 7
21 0 2年 6月
机 械 工 程 与 自 动 化 ME CH ANI CAL ENGI NEE NG 8 AUTOM AT1 RI L 0N
No.3
转速、电流反馈控制直流调速系统的仿真-(终极版)
本科课程设计题目:转速、电流反馈控制直流调速系统的仿真姓名王金良学院专业电气工程及其自动化年级学号指导教师2013 年1月11日转速、电流反馈控制直流调速系统仿真摘要转速、电流反馈控制的直流调速系统是静、动态性能优良、应用最广泛的直流调速系统,对于需要快速正、反转运行的调速系统,缩短起动、制动过程的时间成为提高生产效率的关键。
为了使转速和电流两种负反馈分别起作用,可在系统里设置两个调节器,组成串级控制。
本文介绍了双闭环调速系统的基本原理,而且用Simulink 对系统进行仿真。
关键词:双闭环调速、转速、电流、Simulink一、 设计的题目及任务〔一〕概述本次仿真设计需要用到的是Simulink 仿真方法,Simulink 是Matlab 最重要的组件之一,它提供一个动态系统建模、仿真和综合分析的集成环境。
在该环境中,无需大量书写程序,而只需要通过简单直观的鼠标操作,就可构造出复杂的系统。
Simulink 具有适应面广、结构和流程清晰及仿真精细、贴近实际、效率高、灵活等优点,并基于以上优点Simulink 已被广泛应用于控制理论和数字信号处理的复杂仿真和设计。
〔二〕仿真题目某晶闸管供电的双闭环直流调速系统,整流装置采用三相桥式电路,基本数据如下:直流电机参数为:额定电压220V U =,额定电流136I A =; 额定转速n 1460rpm =,0.132min/e V r C =⋅, 允许过载倍数 1.5λ=; 晶闸管装置放大系数40s K =; 电枢回路总电阻0.5R =Ω; 时间常数0.03,0.18l m s s T T ==; 电流反馈系数0.05/V A β=; 转速反馈系数α=0.00666Vmin/r 。
〔三〕要完成的任务1〕用MATLAB建立电流环仿真模型;2〕分析电流环不同参数下的仿真曲线;3〕用MATLAB建立转速环仿真模型;4〕分析转速环空载起动、满载起动、抗扰波形图仿真曲线。
开环直流调速控制系统与仿真
《计算机仿真及应用B》答卷学号:姓名:班级:任课老师:开环直流调速控制系统的仿真1、开环直流调速控制系统的组成开环控制系统是根据给定的控制量进行控制,而被控制量在整个控制过程中对控制量不产生任何影响。
对于被控制量相对于其预期值可能出现的偏差,开环控制系统不具备修正能力。
而直流调速开环控制系统通常是采用调节电枢电压方案,具体实现在20世纪60年代晶闸管整流器的应用而采用由晶闸管整流器和电动机(V-M )系统实现开环或闭环控制调速系统。
2、开环直流调速控制系统仿真(1)基于数学模型的开环直流调速系统仿真。
①开环直流调速控制系统数学模型。
开环直流调速控制系统主要包括给定信号、晶闸管触发装置及整流环节、平波电抗器和直流电动机等4个环节。
这里所说的基于数学模型的系统仿真主要是指基于传递函数的matlab 下的Simulink 下的实现,再通过机理法可以建立开环直流调速控制系统动态结构图,如图1-1所示。
然后,根据系统I 直接给出各个环节的传递函数及参数。
可以得到系统I 开环控制的动态结构图,如图1-2所示。
②开环直流调速系统仿真实现。
图1-1 开环直流调速控制系统动态结构图图1-2 系统I 的开环系统动态结构图根据系统I 的开环系统动态结构图及其参数值,在matlab 的Simulink 环境可以轻松的建立系统的仿真结构,如图1-3所示。
电动机的转速输出动态曲线,如图1-4所示。
I L (S) — n(s) U *n (s) 一 1/R a T d S+1 R a C e T m SC e K s T s S+1 U d (s) I d (s) I L (S) — n(s) U *n (s) 一1/0.08 0.025s+1 0.08 0.185×0.8s 0.185 23 0.0017s+1 U d (s) I d (s)图1-3 系统I仿真模型图1-4 电动机转速输出曲线通过改变给定信号的大小,来实现对电机输出转速的控制与调节的目的。
直流电动机开环调速MATLAB系统仿真
东北石油大学MATLAB电气应用训练2013年 3 月 8日MATLAB电气应用训练任务书课程 MATLAB电气应用训练题目直流电动机开环调速系统仿真专业电气信息工程及其自动化姓名赵建学号 110603120121主要内容:采用工程设计方法对双闭环直流调速系统进行设计,选择调节器结构,进行参数的计算和校验;给出系统动态结构图,建立起动、抗负载扰动的MATLAB /SIMULINK 仿真模型。
分析系统起动的转速和电流的仿真波形,并进行调试,使双闭环直流调速系统趋于合理与完善基本要求:1.设计直流电动机开环调速系统2.运用MATLAB软件进行仿真3.通过仿真软件得出波形图参考文献:[1] 陈伯时. 电力拖动自动控制系统—运动控制系统第3版[M]. 北京:机械工业出版社, 2007.[2] 王兆安, 黄俊. 电力电子技术第4版[M]. 北京:机械工业出版社, 2000.[3] 任彦硕. 自动控制原理[M]. 北京:机械工业出版社, 2006.[4] 洪乃刚. 电力电子和电力拖动控制系统的MATLAB仿真[M]. 北京:机械工业出版社, 2006.完成期限 2013.2.25——2013.3.8指导教师李宏玉任爽2013年 2 月25 日目录1课题背景 (1)2直流电动机开环调速系统仿真的原理 (2)3仿真过程 (5)3.1仿真原理图 (5)3.2仿真结果 (9)4仿真分析 (12)5总结 (13)参考文献 (14)1课题背景直流调速是现代电力拖动自动控制系统中发展较早的技术。
在20世纪60年代,随着晶闸管的出现,现代电力电子和控制理论、计算机的结合促进了电力传动控制技术研究和应用的繁荣。
晶闸管-直流电动机调速系统为现代工业提供了高效、高性能的动力。
尽管目前交流调速的迅速发展,交流调速技术越趋成熟,以及交流电动机的经济性和易维护性,使交流调速广泛受到用户的欢迎。
但是直流电动机调速系统以其优良的调速性能仍有广阔的市场,并且建立在反馈控制理论基础上的直流调速原理也是交流调速控制的基础。
实验一、开环直流调速系统的仿真实验

实验一、开环直流调速系统的仿真实验实验目的本实验旨在通过搭建开环直流调速系统的仿真实验平台,深入理解电机的转速调节原理,了解直流电机的调速方法,掌握仿真软件的基本操作,为后续实验打下坚实的基础。
实验器材•个人电脑•仿真软件MATLAB/Simulink实验原理直流电动机的转速调节方法有开环调速和闭环调速两种。
开环调速是采用给定电压和负载转矩(或负载电流)的关系表格,来确定电机所需要的电压值,然后通过直流调速器给电机供给相应电压值来调节电机的转速。
本次实验采用开环调速方法,实现直流电动机的转速控制。
电机通过直接接到电源上,输入直流电,可在一段范围内自动调节电机的转速。
实验过程中,通过修改电机被驱动的电压来达到调节电机的转速和功率的目的。
实验步骤1.在MATLAB/Simulink软件中新建一个仿真模型。
2.从Simulink库中拖拽Power System Toolbox中引入电源,将其与直流电动机模块相连。
3.调整电压、电流、电功率大小,展示不同转速下直流电动机的性能。
4.分析电动机性能曲线并记录实验数据。
5.结束实验后,停止仿真,保存实验数据。
实验结果通过本次实验,得到了不同电压下直流电动机的表现,所有数据都记录到实验报告中,以供参考。
从实验结果来看,不同电压下直流电动机的性能有很大的差异。
不同电压产生的转速和功率差异也十分明显。
本实验是初步了解直流电动机转速调节原理的实验,从中我们可以清晰地了解到开环调速的方法和它的应用。
同时还要深刻理解几个关键的概念,如转速、电压和功率之间的关系,并且会更加熟练地掌握这些内容。
此外,在进行实验时还需要注意实验操作的细节,避免出现过程错误和误差。
我们需要紧密联系育人活动和实验课程,深入了解和掌握实验原理,要严格按照实验要求操作,提高实验技能和实验思维能力,为以后的实验打下基础。
开环直流调速系统

实验一开环直流调速系统一、实验目的1.了解晶闸管直流调速系统实验装置的组成。
2.熟悉直流调速系统的组成及基本结构。
3.掌握晶闸管直流调速系统参数及开环系统调速特性的测定。
二、实验所需挂件及附件三、实验线路及原理图1-1是最简单的晶闸管—直流电动机开环调速系统。
其中,U C是系统的给定输入信号,经过触发电路控制晶闸管整流电路,使外界交流电源整流出直流电压U do供给直流电动机,使电动机以一定的速度旋转。
改变控制电压U C就可触发器的脉冲控制角及整流电压U do,相应改变电动机的转速,从而达到调速的目的。
这时电动机的机械特性为:n n C R I U C KC R I U K C R I U n o e d c e tr e d c tr e d do ∆-=-=-=-=∑∑∑φφφφ (6-1)其中 φe d C R I n ∑=∆ ——系统的开环稳态速降。
开环系统当给定输入信号一定时,经过触发电路控制晶闸管整流电路,使交流电源整流出直流电压U do 也是恒定的,电动机就以恒定的速度旋转。
但当外界有扰动(例如负载波动)时,转速就有较大的波动,而开环系统不能自动进行补偿四、实验内容(1)学习DJK01“电源控制屏”的使用方法。
(2)DJK04上的基本单元的调试。
(3)U c 不变时直流电动机开环特性的测定。
(4)U d 不变时直流电动机开环特性的测定。
五、预习要求(1)复习自动控制系统(直流调速系统)教材中有关晶闸管开环直流调速系统、闭环反馈控制系统的内容。
(2)根据实验原理图,能画出实验系统的详细接线图,并理解各控制单元在调速系统中的作用。
图1-1 开环直流调速系统六、实验方法(1)DJK02和DJK02-1上的“触发电路”调试①打开DJK01总电源开关,操作“电源控制屏”上的“三相电网电压指示”开关,观察输入的三相电网电压是否平衡。
②将DJK01“电源控制屏”上“调速电源选择开关”拨至“直流调速”侧。
“双闭环控制直流电动机调速系统”数字仿真实验
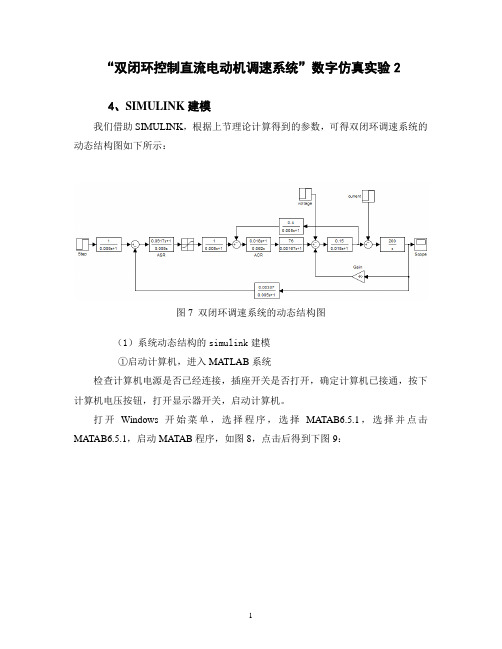
“双闭环控制直流电动机调速系统”数字仿真实验24、SIMULINK建模我们借助SIMULINK,根据上节理论计算得到的参数,可得双闭环调速系统的动态结构图如下所示:图7 双闭环调速系统的动态结构图(1)系统动态结构的simulink建模①启动计算机,进入MATLAB系统检查计算机电源是否已经连接,插座开关是否打开,确定计算机已接通,按下计算机电压按钮,打开显示器开关,启动计算机。
打开Windows开始菜单,选择程序,选择MATAB6.5.1,选择并点击MATAB6.5.1,启动MATAB程序,如图8,点击后得到下图9:图8选择MATAB程序图9 MATAB6.5.1界面点击smulink 中的continuous,选择transfor Fc n(传递函数)就可以编辑系统的传递函数模型了,如图10。
图10 smulink界面②系统设置选择smulink界面左上角的白色图标既建立了一个新的simulink模型,系统地仿真与验证将在这个新模型中完成,可以看到在simulink目录下还有很多的子目录,里面有许多我们这个仿真实验中要用的模块,这里不再一一介绍,自介绍最重要的传递函数模块的设置,其他所需模块参数的摄制过程与之类似。
将transfor Fc n(传递函数)模块用鼠标左键拖入新模型后双击transfor Fc n(传递函数)模块得到图11,开始编辑此模块的属性。
图11参数表与模型建立参数对话栏第一和第二项就是我们需要设置的传递函数的分子与分母,如我们需要设置电流环的控制器的传递函数:0.01810.0181()0.2920.0180.062ACR s s W s s s++=⋅=,这在对话栏的第一栏写如:[0.018 1],第二栏为:[0.062 0]。
点击OK ,参数设置完成。
如图12。
图12传递函数参数设置设置完所有模块的参数后将模块连接起来既得到图7所示的系统仿真模型。
在这里需要注意的是,当我们按照理论设计的仿真模型得到的实验波形与理想的波形有很大的出入。
晶闸管-直流电动机开环调速仿真

《计算机仿真及应用B》答卷题目名称:晶闸管-直流电动机开环调速系统仿真班级:电气本科一班学号: 201240220102 姓名:付超勇指导教师:陈学珍命题说明:此门课程主要考核学生的实际动手能力,掌握用MATLAB建立系统仿真模型的方法,为了对每个学生进行考核,一人一题,雷同率不能超过50%,由学生自己确定题目。
要满足以下几点要求:1、详细描述所做题目的工作原理及所用电机参数;2、直流电机参数要有计算步骤;3、画出仿真原理图,子系统要一一展开;4、仿真结果分析;5、用A4纸打印,在规定时间内交上来。
成绩评定标准:1.原理描述清楚得20分。
2.仿真原理图正确得30分。
3.子系统展开得20分。
4、仿真结果正确及有分析得30分。
实验名称晶闸管-直流电动机开环调速1.1仿真原理图图1-1 直流开环调速系统电气原理图1-2 直流电动机开环调速系统结构图1.2仿真参数明细根据实验原理图在MATLAB软件环境下查找器件、连线,接成入上图所示的线路图。
仿真具体步骤1)所用元器件及其参数设置A)三相交流电源A、B、C首先从Simpowersystes 中的Electrical sources 电源模块组中选取一个交流电压源模块 AC Voltage Source,再用复制的方法得到三相电源的另两个电压源模块,用 Format(格式设定)菜单中 Rotate block(Ctrl +R)将模块水平放置,并点击模块标题名称,将模块标签分别改为“Ua”、“ Ub”、“ Uc”,然后从连接器模块 Connectors 中选取“Ground (output)”元件,按下图进行连接。
(1)Ua(2)Ub(3)Uc图1-4 三相电源参数设置设置三相电压都为220V,两两之间相位差为120,分别为0、-120、-240。
a)6-Pulse Generator同步脉冲触发器包括同步电源和 6 脉冲触发器两部分。
6 脉冲触发器从Simpowersystes中选取 Extra Libray 中的 Contral Blocks 中取获得。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
直流电动机开环调速系统仿真
随着电动机在工业、交通等领域的广泛应用,开发一种高效可靠的电动机控制系统对
于提高整个工业的精度和效率至关重要。
其中,直流电动机开环调速系统是电动机控制系
统中的一种基础环节,其使得直流电动机能够以合适的速度运行,完成工作任务。
一、调速系统的基本原理
1. 直流电动机的基本结构与原理
直流电动机由定子、转子、刷子、通电电源四个基本部分组成,其中,定子上包覆绕组,绕组所带的电流受到直流电源的控制,与转子上的永磁体受到的作用力相互作用,产
生电动力和电磁力,从而使转子旋转。
2. 直流电动机的调速
根据直流电动机的转矩-速度特性曲线可知,直流电动机的转速与电极数、电流和电
磁力等因素密切相关。
因此,通过控制直流电动机的电流大小,可以达到调节直流电动机
转速的目的。
直流电动机开环调速系统主要由电动机本体、电流传感器、减速器以及驱动器等基
本组成部分组成。
其中,电流传感器用于检测电动机电流的大小,而驱动器则输出一定的
电压或电流,控制直流电动机的运行。
二、仿真实现
1. 基本仿真模型
基于MATLAB/Simulink软件建立的直流电动机开环调速系统仿真模型主要由瞬时电压、转速检测、控制逻辑、直流电机、直流电阻负载以及电流检测等组成,实时进行电磁转矩
的计算,最终得到直流电机的运动状态,从而实现调速功能。
2. 仿真分析
通过此仿真模型,我们可以得到直流电动机的运行状态,理解不同负载下的转矩-转
速特性曲线以及电流在不同转速下的变化,从而通过调节电流、电压等参数,以达到理想
的调速效果。
三、结论
直流电动机的开环调速系统是一个重要的电动机控制系统组成部分,其能够有效地提
高电动机的自动控制能力,大大提升了直流电动机的工作效率和精度。
本文通过介绍直流
电动机调速系统的基本原理和仿真实现,为电动机控制系统研究和开发提供了参考和借鉴,对推动整个行业智能化和自动化发展具有重要意义。