基于Matlab_Simulink的异步电机矢量控制系统仿真
基于MatlabSimulink的异步电机矢量控制系统仿真

基于Matlab/Simulink 的异步电机矢量控制系统仿真摘要在异步电机的数学模型分析中以及矢量控制系统的基础之上,利用Matlab/Simulink运用建立模块的思想分别组建了坐标变换模块、PI调节模块、转子磁链个观测模块、SVPWM等模块,然后将这些模块有机的结合,最后构成了异步电动机矢量控制的仿真模块,并且进行了仿真验证。
仿真结果分别显示了电机空载与负载情况下转矩、转速的动态变化曲线,验证了该方法的有效性、实用性,为电机在实际使用中打下了坚实的基础。
本文主要研究异步电机在矢量控制下的仿真。
使用Matlab/Simulink中的电气系统模块(PowerSystem Blocksets)将其重组得到新的模型并对其仿真,最后分析仿真结果得出结论。
关键词: 异步电机矢量控制 MATLAB/SIMULINK 变频调速目录摘要 (I)Abstract......................................................................................... 错误!未定义书签。
1 绪论 (1)1.1 电机及电力拖动技术的发展概况 (1)1.2 异步电动机的控制技术现状................................................. 错误!未定义书签。
1.3 仿真软件的简介及其选择..................................................... 错误!未定义书签。
1.4 论文的主要内容及结构安排................................................. 错误!未定义书签。
2 异步电动机的数学模型 (4)2.1 异步电动机的稳态数学模型 (4)2.2 异步电动机的动态数学模型 (5)2.3 本章小结 (7)3 矢量控制系统基本思路 (8)3.1 矢量控制的基本原理 (8)3.2 坐标变换 (9)3.3SVPWM调制 (21)3.3本章小结 (11)4 异步电机矢量控制系统仿真 (14)4.1矢量控制系统模型 (14)4.2仿真结果与分析 (15)4.5本章小结 (17)5结论与展望 (18)5.1结论 (18)5.2后续研究工作的展望 (19)参考文献 ....................................................................................... 错误!未定义书签。
基于Matlab异步电动机矢量控制系统的仿真

基于Matlab转差频率控制的矢量控制系统的仿真概述:常用的电机变频调速控制方法有电压频率协调控制(即v/F比为常数)、转差频率控制、矢量控制以及直接转矩控制等。
其中,矢量控制是目前交流电动机较先进的一种控制方式。
它又有基于转差频率控制的、无速度传感器和有速度传感器等多种矢量控制方式。
其中基于转差频率控制的矢量控制方式是在进行U /f恒定控制的基础上,通过检测异步电动机的实际速度n,并得到对应的控制频率f,然后根据希望得到的转矩,分别控制定子电流矢量及两个分量间的相位,对输出频率f进行控制的。
采用这种控制方法可以使调速系统消除动态过程中转矩电流的波动,从而在一定程度上改善了系统的静态和动态性能,同时它又具有比其它矢量控制方法简便、结构简单、控制精度高等特点。
Simulink仿真系统是Matlab最重要的组件之一,系统提供了标准的模型库,能够帮助用户在此基础上创建新的模型库,描述、模拟、评价和细化系统,从而达到系统分析的目的。
在此利用Matlab/Simulink软件构建了转差频率矢量控制的异步电机调速系统仿真模型,并对此仿真模型进行了实验分析。
矢量控制是目前交流电动机的先进控制方式,一般将含有矢量交换的交流电动机控制都称为矢量控制,实际上只有建立在等效直流电动机模型上,并按转子磁场准确定向地控制,电动机才能获得最优的动态性能。
转差频率矢量控制系统结构简单且易于实现,控制精度高,具有良好的控制性能、因此,早起的矢量控制通用变频器上采用基于转差频率控制的矢量控制方式。
基于此,本文在Mtalab/Simulink环境下对转差频率矢量控制系统进行了仿真研究。
1转差频率矢量控制系统由于异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。
转差频率矢量控制是按转子磁链定向的间接矢量控制系统,不需要进行复杂的磁通检测和繁琐的坐标变换,只要在保证转子磁链大小不变的前提下,通过检测定子电流和旋转磁场角速度,通过两相同步旋转坐标系(M-T坐标系)上的数学模型运算就可以实现间接的磁场定向控制。
基于MatlabSimulink的异步电机矢量控制系统仿真

基于MatlabSimulink的异步电机矢量控制系统仿真一、本文概述随着电力电子技术和控制理论的不断发展,异步电机矢量控制系统已成为现代电机控制领域的重要分支。
该系统通过精确控制异步电机的磁通和转矩,实现了对电机的高效、稳定和动态性能的优化。
Matlab/Simulink作为一种强大的仿真工具,为异步电机矢量控制系统的研究和设计提供了便捷的平台。
本文旨在探讨基于Matlab/Simulink的异步电机矢量控制系统仿真方法。
文章将简要介绍异步电机矢量控制的基本原理和关键技术,包括空间矢量脉宽调制(SVPWM)技术、转子磁链观测技术以及矢量控制策略等。
详细阐述如何利用Matlab/Simulink搭建异步电机矢量控制系统的仿真模型,包括电机模型、控制器模型以及系统仿真模型的构建过程。
文章还将探讨仿真模型的参数设置、仿真过程以及仿真结果的分析方法。
通过本文的研究,读者可以深入了解异步电机矢量控制系统的基本原理和仿真方法,掌握基于Matlab/Simulink的仿真技术,为异步电机矢量控制系统的实际设计和应用提供有益的参考和借鉴。
本文的研究也有助于推动异步电机矢量控制技术的发展和应用领域的拓展。
二、异步电机基本原理异步电机,又称感应电机,是一种广泛应用于工业领域的电动机。
其基本原理基于电磁感应和电磁力作用。
异步电机主要包括定子(静止部分)和转子(旋转部分)。
定子通常由铁芯和三相绕组构成,而转子则可能由实心铁芯、鼠笼型或绕线型结构组成。
当异步电机通电时,定子绕组中的三相电流会产生旋转磁场。
这个旋转磁场与转子中的导体相互作用,根据法拉第电磁感应定律,会在转子导体中产生感应电动势和感应电流。
这些感应电流在旋转磁场的作用下,受到电磁力的作用,从而使转子产生旋转力矩,驱动转子旋转。
异步电机的旋转速度与定子旋转磁场的旋转速度并不完全同步,这也是其被称为“异步”电机的原因。
异步电机的旋转速度通常略低于旋转磁场的同步速度,这是由于转子导体的电感和电阻导致的电磁延迟效应。
基于MATLABSimulink的异步电机仿真

For personal use only in study and research; not for commercial use
基于Simulink的异步电机矢量控制调速建模与仿真
交 流 调 速 的 重 要 方 向 之 一 建 立 异 步 电 机 矢 量 控 制 系 统 一。
的仿 真 模 型 , 能有 效 地 节 省 控 制 系统 的设 计 时 间 , 时验 及
证施加 于 系统 的控制 算法 , 时 呵 以利用 计 算 机 仿 真 的优 同
越 性 , 入 扰 动 和 参 数 变 化 , 便 观 察 系 统 在 不 同 工 况 下 加 以 的动 静态特 性 。
c nr1 o to . Ke r s a y c r n u a h n ; e t r c n r l sm u a i n y wo d : s n h o o s m c i e v c o o t o ; i l t o
矢 量 控 制 是 在 电 机 统 一 理 论 、 电 能 量 转 换 和 坐 标 变 机
换 理 论 的 基 础 上 发 展 起 来 的 一 种 先 进 的 控 制 策 略 , 现 代 是
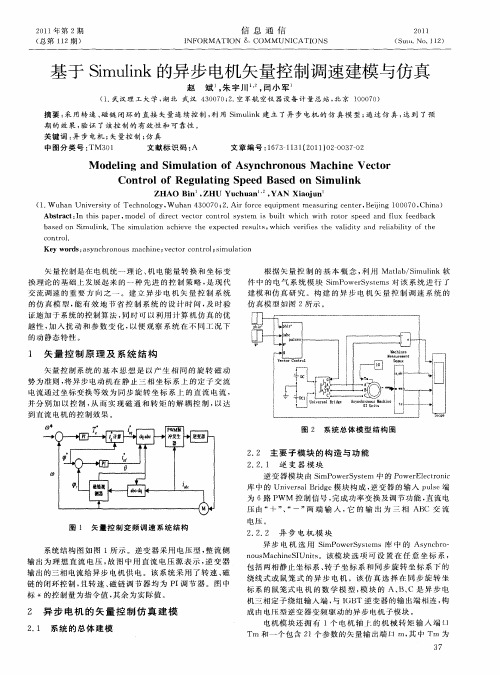
根 据 矢 量 控 制 的 基 本 概 念 , 用 Malb Smuik软 利 t /i l a n 件 中 的 电 气 系 统 模 块 SmP weS se i o ry tms对 该 系 统 进 行 r 建 模 和 仿 真 研 究 。 构 建 的 异 步 电 机 矢 量 控 制 调 速 系 统 的 仿 真 模 型 如 图 2所 示 。
图 2 系 统 总 体 模 型 结 构 图
2 2 主 要 子 模 块 的 构 造 与 功 能 .
2 2 1 逆 变 器 模 块 .. 逆 变 器 模 块 由 SmP weS se 中 的 P weE et nc i o ry tm o r lcr i o
库 中 的 Unv ra B ig ies l rd e模 块 构 成 , 变 器 的 输 入 p le 逆 us 端
基于MATLAB的异步电机矢量控制调速系统仿真

宁波大学答题纸(20 13 —20 14 学年第 1 学期)课号: 101G08EA1 课程名称:MATLAB 应用技术 改卷教师: 朱莹 学号: 116040069 姓 名: 覃坤勇 得 分:基于MATLAB/SIMULINK 的异步电机矢量控制调速系统仿真1基本要求在分析异步电机的动态数学模型及矢量控制原理的基础上,利用Matlab/Simulink ,采用模块化的思想分别建立了电流控制型变频器模块、异步电机矢量变换模型、电流滞环PWM 控制模块、以及电流控制观察、速度调节等模块,再进行功能模块的有机整合,构成了交流异步电机矢量控制系统,并进行了仿真试验。
2 理论基础感应电机的数学模型是一高阶、非线性、强耦合的多变量系统,为便于研究,通常通过坐标变换使之简化。
根据交流电机理论,在忽略空间谐波、磁饱和、铁损以及频率和温度变化对绕组的影响的情况下,经过坐标变换,三相交流感应电动机在d-q 坐标系下的数学模型可用如下方程描述:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∙⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡++--+=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡2211221111111100000t m t m r s m s r m m m S Sm m SS t m i i i i R L L p L R p L p L L p L R L L p L L p L R u u ωωωωωω (1) 式中,S L ,r L 分别为定子和转子的自感;1R ,2R 分别为定子和转子的电阻; m L 为定转子间的互感。
异步电机矢量控制中,被控的是定子电流因此,需要推导出定子电流分量和其他物理量的关系。
磁链方程如下:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡∙⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡221122110000000q d q d r mr m m S m Sq d q d i i i i L L L L L L L L ψψψψ (2)2211ψm m L p T i +=(3) 式中,2T 为转子励磁时间常数,即 22R L T r=。
基于Matlab_Simulink的异步电机直接转矩控制系统仿真_何萍
, 2# ! . ) ! # !’ 2 , ’ . ) # ! . " & , )’$ 2 # ! ! . "
[ ]
( ) !
" $ " 2 $ , ’$ ! " ! 式中,- 5 ( 。 ./ ’ ’ 6’$) * ) 磁链方程为
电气应用 ! " " #年第! $卷第%期
基于 8 5 ’ # 5 6/ . / 0 $ # / 1 2的异步电机直接转矩控制系统仿真
$* ’ 2 ’$ 2# * ! / * ! ! # ! ! # $* 2 ’ 2 ’$ * * * " " $ $* ’$ 2 ’ 2 * ! ) ) !
" $ "2 $* " 转矩方程为
( ) -
’$
2
$ " $ ’ * ) ) " ( ) 7
( ! 0( $ " * * * * !) 4 $* " ) $* " 运动方程为
, 引言
直接转矩控制变频调速技术,是% "世纪2 "年 代由德国鲁尔大学的 3 4 4 , 1 6 7 8 - 教授和日本学者 5 9 / / : / ; : (提出的。它用空间矢量分析方法,在二 相静止坐标系下计算、控制异步电动机的磁链和转 矩,采用两点式调节产生 < =. 信号,直接对逆变 器的开关状态进行最佳控制,以获得转矩的高动态 性能。直接转矩控制技术自诞生起就以其新颖的控 制思想,简洁明了的系统结构,优良的静、动态性
" " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " ! " ! 直接转矩控制系统仿真模型 直接转矩控制系统的仿真模型如图!所示,磁 链模型 ( )的实现如图 & 所示,先将测得的三 " # $ % 相定子电压和定子电流经过三相 / 二相变换,然后 用积分模块建立起磁链模型。转矩模型 ( ) ’ ( ) $ + * 的实现比较简单,在此省略。
基于MatlabSimulink的异步电机矢量控制系统仿真
基于Matlab/Simulink 的异步电机矢量控制系统仿真摘要在异步电机的数学模型分析中以及矢量控制系统的基础之上,利用Matlab/Simulink运用建立模块的思想分别组建了坐标变换模块、PI调节模块、转子磁链个观测模块、SVPWM等模块,然后将这些模块有机的结合,最后构成了异步电动机矢量控制的仿真模块,并且进行了仿真验证。
仿真结果分别显示了电机空载与负载情况下转矩、转速的动态变化曲线,验证了该方法的有效性、实用性,为电机在实际使用中打下了坚实的基础。
本文主要研究异步电机在矢量控制下的仿真。
使用Matlab/Simulink中的电气系统模块(PowerSystem Blocksets)将其重组得到新的模型并对其仿真,最后分析仿真结果得出结论。
关键词: 异步电机矢量控制 MATLAB/SIMULINK 变频调速目录摘要 (I)Abstract......................................................................................... 错误!未定义书签。
1 绪论 (1)1.1 电机及电力拖动技术的发展概况 (1)1.2 异步电动机的控制技术现状................................................. 错误!未定义书签。
1.3 仿真软件的简介及其选择..................................................... 错误!未定义书签。
1.4 论文的主要内容及结构安排................................................. 错误!未定义书签。
2 异步电动机的数学模型 (4)2.1 异步电动机的稳态数学模型 (4)2.2 异步电动机的动态数学模型 (5)2.3 本章小结 (7)3 矢量控制系统基本思路 (8)3.1 矢量控制的基本原理 (8)3.2 坐标变换 (9)3.3SVPWM调制 (21)3.3本章小结 (11)4 异步电机矢量控制系统仿真 (14)4.1矢量控制系统模型 (14)4.2仿真结果与分析 (15)4.5本章小结 (17)5结论与展望 (18)5.1结论 (18)5.2后续研究工作的展望 (19)参考文献 ....................................................................................... 错误!未定义书签。
基于SIMULINK的异步电机的建模与仿真
基于SIMULINK的异步电机的建模与仿真摘要利用MATLAB软件中的动态仿真工具SIMULINK,构建了异步电机的仿真模型,并通过实验验证了所建电机模型的可行性、与实用性。
关键词异步电机建模仿真MATLAB/SIMULINK1 引言随着电力电子技术的飞速进步和交流电机调速理论的不断深入。
异步电机的应用日益广泛。
然而异步电机是一个高阶、非线性、强耦合的多变量系统。
通过坐标变换,可以消除瞬变过程中的周期性时变系统和降低方程的阶数,从而简化数学模型,基于这种观念,利用计算机仿真技术去建模既省时又直观。
本文采用异步电机基于两相静止坐标系下的数学模型,结合坐标变换,利用MATLAB软件中的动态仿真SIMULINK,建立异步电机的仿真模型。
并通过实例进行实时仿真。
2 基于静止坐标系下异步电机数学模型异步电机的数学建模方法是将三相电机转换成两相电机,按两相电机建模。
2.1电压矩阵方程异步电机在两相静止坐标系中的电压矩阵方程为式中,uα1,uβ1分别是异步电机在α、β轴上定子电压分量;uα2,uβ2分别是异步电机在α、β轴上转子电压分量;iα1,iβ1分别是异步电机在α、β轴上定子电流分量;iα2,iβ2分别是异步电机在α、β轴上转子电流分量;R1、R2分别为定、转子电阻;L1、L2分别为定、转子电感;L m为互感;s为微分算子;ω为转子角速度特别地,对于笼型电机转子侧电压为零。
2.2三相-二相变换三相对称静止绕组,通以三相平衡的正弦电流,产生合成磁动势,以同步转速旋转,则此三相称为三相静止坐标系。
两相静止绕组,它们在空间互差90度电角度,且通入时间上互差90度的两相电流,也产生与上相同的磁动势,则把此两相称为两相静止坐标系。
若它们的磁动势空间位置一致、幅值和转速相等,故可认为这两种坐标系等效。
三相-两相的转换矩阵如下:2.3转矩和运动方程转矩方程式为:式中p n为电机的极对数;J为电机的转动惯量;T l为负载转矩。
基于MATLAB_SIMULINK的异步电动机软起动控制系统的仿真
1 A
+ -V
1
A1
电压测量
+
B
-V
B1
+
C
-V
C1
图 7 同步电路模块
2.1.5 电流有效值计算模块
有 效 值 计 算 模 块 可 以 直 接 选 择 MATLAB/
Simulink 中的 Extra Library/Measurements/RMS. 注
意在使用时要将频率设定为 50 Hz.
2.2 软起动 PID 控制环节
本文基于 MATLAB/SIMULINK 建立了异步电 动机软起动 PID 控制系统的仿真模型,并完成仿真 实验。文献[3]在设计软起动控制电路中采用的是利
收稿日期:2010-10-14 作者简介:朱延枫(1977-),女,辽宁北镇人,讲师,硕士。
第6期
朱延枫等:基于 MATLAB/SIMULINK 的异步电动机软起动控制系统的仿真
kP
_
1
+
du/dt
0.01
Iref
1
kD
+
2
Iback
触发角 Saturation +
1/s
1
kI
1
+-
1
A1
Relay Rate Limiter
g1
+
100
触发角初始值
-1
+-
2
Gain
g4
图 6 软起动 PID 控制模块
2
u(1)/18
Function
图 4 触发脉冲产生模块子系统
2.1.2 三相交流调压模块 三相交流调压模块是对图 1 的软起动主电路图
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
L ss Ls = - Ms - Ms L rr Lr = - Mr - Mr
- Ms L ss - Ms - Mr L rr - Mr
- Ms - Ms L ss - Mr - Mr L rr
R1 和 R2 分别为定、 转子每相绕组的电阻。 磁链方程: 用 ψ s 和 ψ r 分别表示定子磁链和转子磁链的 i s 和 i r 分别表示定子电流和转子电流的 列矩阵, 列矩阵, 则磁链方程可写为:
* 电流的 给 定 信 号 ism 和 电 枢 电 流 的 给 定 信 号 * ist * , i* i* 经过 Park 变换得到 i A 、 与交流异步 B 、 C , * *
{
U B = r2 i B + p ψ B
( 1)
式中
iB 、 i C 通过电流滞环调节 电机的反馈电流信号 i A 、 uB , uC , 器后得到了交流异步电机的输入电压 u A , 监测三相异步电动机的转速, 即可输出交流异步 电机调速所需的三项变频电流。 根据模块化建 模的思想, 将控制系统分割为各个功能独立的子 其中主要包括: 交流异步电机本体模块、 矢 模块, 量控制模块、 帕克变换模块、 电流滞环控制模块、 速度控制模块。通过这些功能模块的有机整合,
Simulation of Asynchronous Motor Vector Control System based on Matlab / Simulink
Jia Rui, Kang Jinping
( North China Electric Power University, Beijing 102206 , China) Abstract: In this paper, the mathematical model of the asynchronous motor was analyzed based on ABC coordinate system. A common and simple dynamic simulation model of asynchronous motor was given using Matlab / Simulink, and the model was applied to asynchronous motor vector control system. Based upon rotor flux orientation, the simulation model of the asynchronous motor vector control system was constructed. When using this model , one only needed to transfer it to the workspace and input proper motor parameters, it is demonstrated that the model has quick rewith flexible, convenient , intuitive and a series of advantages. Through the simulation of the asynchronous mosponse, tor vector control system, it is verified that this model was correct and effective. Key words: ABC coordinate system; asynchronous motor; vector control ; Matlab ; simulation
No. 9
2011
华北电力技术
NORTH CHINA ELECTRIC POWER
19
就是将公共坐标系统建立在转子定向磁场上的 矢量控制方法, 在 M - T 坐标按转子磁场定向后, 定子电流的两个分量实现了解耦 ,i M 唯一确定磁 链 Ψ r 的值,i T 只影响转矩, 与直流电动机中的励 转子方程大大简化, 磁电流和电枢电流相对应, 实现了磁通和转矩之间的解耦。 这样简化了多 变量、 强耦合的交流电动机调速系统的控制问 使交流 题。矢量控制主要的特点是动态响应快, 电机的调速性能有质的提高。 1 . 2 三相交流异步电机的数学模型 三相交流异步电机是一个高阶、 非线性、 强 耦合的多变量系统。为了便于分析, 假定: ( 1 ) 三相绕组对称, 忽略空间谐波, 磁势沿 气隙圆周按正弦分布; ( 2 ) 忽略磁饱和, 各绕组的自感和互感都是 线性的; ( 3 ) 忽略铁损, 不计涡流和磁滞损耗; ( 4 ) 不考虑频率和温度变化对绕组的影响 。 则三相定子的电压方程可表示为 : U A = r1 i A + p ψ A U C = r3 i C + p ψ C UA 、 UB 、 UC — — —定子三相电压; iA 、 iB 、 iC — — —定子三相电流; — —定子三相绕组磁链; ψA 、 ψB 、 ψC — r1 — — —定子各绕组电阻; p — — —微分算子 p = d / dt。 三相转子的电压方程为: U a = r2 i a + p ψ a U c = r2 i c + p ψ c Ub 、 Uc — — —转子三相电压; 式中 U a 、 ia 、 ib 、 ic — — —转子三相电流; — —转子三相绕组磁链; ψa 、 ψb 、 ψc — r2— — —转子各绕组电阻。 磁链方程为: ψ A L AA ψ L BA B ψ C L CA = ψ a L aA ψ L b bA ψ L cA c L AB L BB L CB L aB L bB L cB L AC L BC L CC L aC L bC L cC L Aa L Ba L Ca L aa L ba L ca L Ab L Bb L Cb L ab L bb L cb L Ac i A L Bc i B L Cc i C L ac i a L bc i b L cc i c ( 3)
18
华北电力技术
NORTH CHINA ELECTRIC POWER
No. 9
2011
基于 Matlab / Simulink 的异步电机矢量 控制系统仿真
贾 瑞, 康锦萍
( 华北电力大学, 北京 102206 ) 摘 要: 在 ABC 坐标系的基础上, 分析了异步电机的数学模型 。 利用 Matlab / Simulink 给出异步电机的一个
T u c]
则三相异步电动机的电压方程用矩阵表示为 :
20
华北电力技术
NORTH CHINA ELECTRIC POWER
No. 9
2011
图1
异步电动机矢量控制变频调速系统的仿真模型
[u ] [ 0 R ][i ] [ψ ]
us
r
=
Rs
0
is
r
+p
ψs
r
( 6)
s
R r 分别为定、 式中: R s 、 转子绕组的电阻矩阵, 均 为对角阵。 R1 Rs = 0 0 0 R1 0 0 0 ; R1 R2 Rr = 0 0 0 R2 0 0 0 R2
0
引言
本文在分析异步电动机矢量控制方法的基 础上, 应用 Simulink 建立了异步电动机矢量控制 调速系统的仿真模型, 同时对某电机进行了调速 控制仿真分析。
交流异步电动机的数学模型是一个高阶、 非 线性、 强耦合的多变量系统。 经典的交流电机理 论和传统控制系统分析方法不能完全适应于现 20 世纪 代交流调速系统。为了实现高动态性能, 70 年代, 许多专家学者经过潜心研究, 并在实践 中不断改进, 终于形成了目前所普遍应用的异步 电动机矢量控制变频调速系统。 按转子磁场定 向的矢量控制通过一系列的坐标变换, 实现了电 机定子电流中励磁分量和转矩分量的解耦控制。 将控制对象的感应电机当作直流电机来进行控 制, 实现了对电机电磁转矩的动态控制, 从而优 化了调速系统的性能。
M sr = M sr × cosθ cos( θ + 120°) cos( θ - 120°) cos ( - 120° ) cosθ cos( θ + 120°) θ cos( θ + 120°) cos( θ - 120°) cosθ T Mrs = Msr L rr 分别表示定、 式中: L ss 、 转子每相绕组的自感; Ms 、 M r 分别表示定、 转子三相绕组各相间的互感 大小; M sr 为定、 转子绕组间互感的幅值。 当定子的零序电流等于零 ( 如定子绕组为 Y L ss i A - 联结, 且 无 中 线) , 即 i A + i B + i C = 0 时, M s i B - M s i C = L ss i A - M s ( i B + i C ) = L1 i A , 则定子的 磁链方程可化简为: ψ s = L1 i s + M sr i r ; 同理, 转子的 : = L i + M i 。 磁链方程可化简为 ψ r 2 r rs s
{
U b = r2 i b + p ψ b
( 2)
就可在 Matlab 中搭建出交流异步电机控制系统 的仿真模型, 并实现双闭环的控制算法。 2. 1 交流异步电机本体模块 在整个控制系统的仿真模型中, 交流异步电 机本体模块是最重要的部分, 反映的是交流异步 电机的本质属性。 交流异步电机本体模块的输 uB , uC , 入是电流置换调节器的输出脉冲电压 u A , iB , i C 以及转速 n 和电磁 输出是定子三项电流 i A , 转矩 T e 。 电压方程: 用 u s 和 u r 分别表示定子绕组和转子绕组的 端 电压列矩阵, 即: T u A u B u C] us = [ ua ur = [ ub