可达矩阵快速算法
可达矩阵的计算方法及例题

可达矩阵的计算方法及例题
可达矩阵是一类常用分析工具,可以考核有限系统中各元素之间可达性、有效性和通路上的损失程度。
由此可见可达矩阵在计算机科学等广泛领域有着广泛的应用。
以下是可达矩阵的计算方法及例题的相关内容:
一、可达矩阵的计算方法
1. 计算节点可达性:首先确定节点的权重,节点之间的距离,然后计算节点之间可达性。
2. 计算路径可达性:计算可达矩阵,可以根据有向图模型来计算各节点间的可达性。
通过求取以该节点为根的最短路径树,可以确定各节点之间的最短路径长度。
3. 计算有效性:有效性表示的是链接两个节点的信息的可靠性。
可以根据网络中每条边的长度和拓扑关系来计算节点之间的有效性。
4. 计算全部可达性:可以利用可达矩阵来计算有向图中任意两个结点之间是否可达,可达则该位置表示为1,否则表示为0。
二、可达矩阵的例题
例1.假设有一个有向图G = (V,E),它的顶点集为V = {1, 2, 3, 4, 5},边
集为E = {(1, 2), (1, 5), (2, 4), (2, 3), (3, 5), (4, 5)},则该有向图的可达矩阵可以表示为:
1 2 3 4 5
1 1 1 0 1
2 0 1 1 1
3 0 0 1 1
4 0 0 0 1
5 0 0 0 0。
邻接矩阵求可达矩阵
邻接矩阵求可达矩阵邻接矩阵是图论中一种常用的表示图结构的方法,它将图中的顶点和边转化为一个矩阵。
邻接矩阵求可达矩阵是指通过邻接矩阵来计算图中各个顶点之间的可达关系。
在本文中,我们将详细介绍邻接矩阵的概念、构建方法以及如何通过邻接矩阵求得可达矩阵。
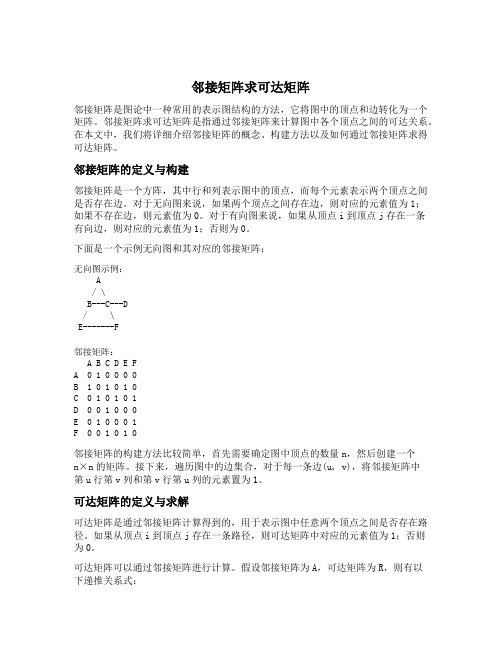
邻接矩阵的定义与构建邻接矩阵是一个方阵,其中行和列表示图中的顶点,而每个元素表示两个顶点之间是否存在边。
对于无向图来说,如果两个顶点之间存在边,则对应的元素值为1;如果不存在边,则元素值为0。
对于有向图来说,如果从顶点i到顶点j存在一条有向边,则对应的元素值为1;否则为0。
下面是一个示例无向图和其对应的邻接矩阵:无向图示例:A/ \B---C---D/ \E-------F邻接矩阵:A B C D E FA 0 1 0 0 0 0B 1 0 1 0 1 0C 0 1 0 1 0 1D 0 0 1 0 0 0E 0 1 0 0 0 1F 0 0 1 0 1 0邻接矩阵的构建方法比较简单,首先需要确定图中顶点的数量n,然后创建一个n×n的矩阵。
接下来,遍历图中的边集合,对于每一条边(u, v),将邻接矩阵中第u行第v列和第v行第u列的元素置为1。
可达矩阵的定义与求解可达矩阵是通过邻接矩阵计算得到的,用于表示图中任意两个顶点之间是否存在路径。
如果从顶点i到顶点j存在一条路径,则可达矩阵中对应的元素值为1;否则为0。
可达矩阵可以通过邻接矩阵进行计算。
假设邻接矩阵为A,可达矩阵为R,则有以下递推关系式:R = A + A^2 + A^3 + ... + A^n-1其中,A^k表示邻接矩阵A自乘k次。
这个递推关系式的含义是,如果从顶点i到顶点j存在一条长度不超过n-1的路径,则可达矩阵中对应的元素值为1;否则为0。
求解可达矩阵的算法如下:1.初始化可达矩阵R为邻接矩阵A。
2.对可达矩阵R进行n-1次自乘运算,即R = R + A^2 + A^3 + … + A^n-1。
02-12.2 可达矩阵-PPT

由Bz的元素如(1)(i,戸1, 2,. . .n且i〈〉j)是否为0可写出有向图D的可达矩阵,但命总为1. 下图所
示有向图D的可达矩阵为
卩2
卩3
1 0 00
1 1 11 P=
1 0 11 1 0 11
I+ZG 3)xV前5 = • *孑 1
结论:
如果把邻接矩阵看作是结点集V上关系R的关系矩阵,贝间达矩阵P即为E+M捉 求可达矩 阵的方法: 求Cn=E+Al + ...+AE ----->将G中不为0的元素改为1,为0的不变
小结
掌握图的可达矩阵的定义与性质,掌握求可达矩阵的方法步骤。关于 图的可达矩阵的思维 形式注记图如下图所示。
可达矩阵的概念可以推广到无向图中,只要将无向图的每条边看成是具有相反方向的两条边 即可,无向图的邻接矩阵是对称矩阵,其可达矩阵称为连通矩阵 无向图G是连通图当且仅当它的可达矩阵P的所有元素均为1.
利用邻接矩阵A和可达矩阵P,可以判断图的连通性:
❸ 1)有向图G是强连通图,当且仅当它的可达矩阵P的所有元素均为1; , 2)有向图G是单侧连通图,当且仅当的所有元素均为1; ❸3)有向图G是弱连通图,当且仅当以作为邻接矩阵求得的可达矩阵P' 中所有元素均为1。
12. 2可达矩阵
定义12.2
设DKV, E〉为有向图。v ={n}r 令 Pij =
1, V/可达vj 0,否则
称(Pij)nxn为D的可达矩阵,记作P(D),简记为P. ___
由于e V, %可达叫,所以P(D)ቤተ መጻሕፍቲ ባይዱ对角线上的元素全为1.
由定义不难看出,D强连通当且仅当P(D)为全1矩阵
矩阵计算加速算法
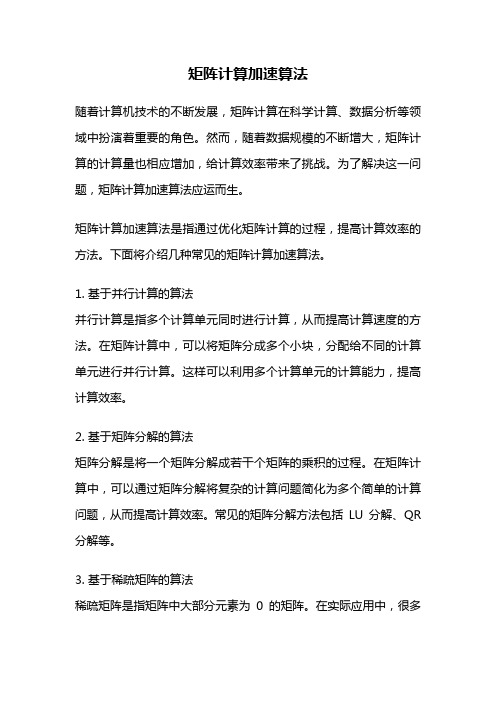
矩阵计算加速算法随着计算机技术的不断发展,矩阵计算在科学计算、数据分析等领域中扮演着重要的角色。
然而,随着数据规模的不断增大,矩阵计算的计算量也相应增加,给计算效率带来了挑战。
为了解决这一问题,矩阵计算加速算法应运而生。
矩阵计算加速算法是指通过优化矩阵计算的过程,提高计算效率的方法。
下面将介绍几种常见的矩阵计算加速算法。
1. 基于并行计算的算法并行计算是指多个计算单元同时进行计算,从而提高计算速度的方法。
在矩阵计算中,可以将矩阵分成多个小块,分配给不同的计算单元进行并行计算。
这样可以利用多个计算单元的计算能力,提高计算效率。
2. 基于矩阵分解的算法矩阵分解是将一个矩阵分解成若干个矩阵的乘积的过程。
在矩阵计算中,可以通过矩阵分解将复杂的计算问题简化为多个简单的计算问题,从而提高计算效率。
常见的矩阵分解方法包括LU分解、QR 分解等。
3. 基于稀疏矩阵的算法稀疏矩阵是指矩阵中大部分元素为0的矩阵。
在实际应用中,很多矩阵都是稀疏矩阵。
对于稀疏矩阵,可以采用特殊的存储结构和计算方法,从而提高计算效率。
常见的稀疏矩阵存储结构包括压缩行存储(CSR)和压缩列存储(CSC)等。
4. 基于GPU加速的算法GPU是图形处理器的简称,它具有强大的并行计算能力。
在矩阵计算中,可以利用GPU的并行计算能力,将矩阵计算任务分配给多个GPU核心同时进行计算,从而提高计算效率。
除了以上几种常见的矩阵计算加速算法外,还有一些其他的算法也可以用于加速矩阵计算。
例如,矩阵分块算法将大矩阵分成若干个小块,分别进行计算;矩阵压缩算法通过压缩矩阵的存储空间,减少计算量。
这些算法都可以根据具体的需求进行选择和组合使用,以提高矩阵计算的效率。
矩阵计算加速算法通过优化矩阵计算的过程,提高计算效率,是解决大规模矩阵计算问题的重要方法。
随着计算机技术的不断进步,矩阵计算加速算法的研究也在不断深入,相信在不久的将来,会有更多高效的矩阵计算加速算法被提出和应用。
可达矩阵

12.2 可达矩阵定义12.2
⎩⎨⎧=否则
可达,0,1j i ij v v p ⎥⎥⎥⎥⎦
⎤⎢⎢⎢⎢⎣⎡=1101110111110001P
结论:
可达矩阵的概念可以推广到无向图中,只要将无向图的每条边看成是具有相反方向的两条边即可,无向图的邻接矩阵是对称矩阵,其可达矩阵称为连通矩阵。
无向图G 是连通图当且仅当它的可达矩阵P 的所有元素均为1.
求C n =E+A 1+…+A n-1将C n 中不为0的元素改为1,为0的不变
利用邻接矩阵A和可达矩阵P,可以判断图的连通性:
小结
掌握图的可达矩阵的定义与性质,掌握求可达矩阵的方法步骤。
关于图的可达矩阵的思维形式注记图如下图所示。
邻接矩阵和可达矩阵
邻接矩阵和可达矩阵《邻接矩阵》嗨,亲爱的小伙伴们!今天咱们来聊聊邻接矩阵这个有趣的东西。
你知道吗?邻接矩阵就像是一张地图,能告诉我们各个点之间的关系。
想象一下,有一堆城市,邻接矩阵就能清晰地表示出哪些城市是直接连着的。
比如说,咱们有三个城市 A、B、C。
如果 A 和 B 直接有路相通,那在邻接矩阵里对应的位置就是 1 ;要是 A 和 C 没路连着,对应的位置就是 0 。
是不是有点像在玩连连看呀?邻接矩阵还能帮我们快速判断两点之间有没有直接的联系。
这在很多领域都有用呢,像网络分析、图论研究。
而且哦,通过邻接矩阵,我们还能计算出很多有趣的东西,比如路径的长度啦,图的连通性啦。
它就像是一个神奇的小,默默地为我们服务,让复杂的关系变得清晰明了。
怎么样,邻接矩阵是不是很有意思?《可达矩阵》嘿,朋友们!今天来和大家讲讲可达矩阵。
可达矩阵就像是一个超级侦探,能告诉我们从一个地方能不能到达另一个地方。
比如说在一个迷宫里,可达矩阵就能告诉我们从起点能不能走到终点。
如果能走到,对应的位置就是 1 ,走不到就是 0 。
它比邻接矩阵更厉害一点,邻接矩阵只看直接的连接,可达矩阵把间接的能到达的也都考虑进去啦。
想象一下,我们要规划一条旅行路线,可达矩阵就能帮我们搞清楚,从一个景点能不能通过各种交通方式到达另一个景点。
在计算机科学、交通规划、系统分析里,可达矩阵都发挥着大作用呢。
它能让我们提前知道能不能到达目的地,避免走冤枉路,是不是很棒?可达矩阵就像是我们的导航小天使,指引着我们找到正确的方向。
怎么样,你喜欢这个神奇的可达矩阵吗?。
(图论)matlab模板程序
第一讲:图论模型程序一:可达矩阵算法%根据邻接矩阵A〔有向图〕求可达矩阵P〔有向图〕function P=dgraf<A>n=size<A,1>;P=A;for i=2:nP=P+A^i;endP<P~=0>=1; %将不为0的元素变为1P;程序二:无向图关联矩阵和邻接矩阵互换算法F表示所给出的图的相应矩阵W表示程序运行结束后的结果f=0表示把邻接矩阵转换为关联矩阵f=1表示把关联矩阵转换为邻接矩阵%无向图的关联矩阵和邻接矩阵的相互转换function W=incandadf<F,f>if f==0 %邻接矩阵转换为关联矩阵m=sum<sum<F>>/2; %计算图的边数n=size<F,1>;W=zeros<n,m>;k=1;for i=1:nfor j=i:nif F<i,j>~=0W<i,k>=1; %给边的始点赋值为1W<j,k>=1; %给边的终点赋值为1k=k+1;endendendelseif f==1 %关联矩阵转换为邻接矩阵m=size<F,2>;n=size<F,1>;W=zeros<n,n>;for i=1:ma=find<F<:,i>~=0>;W<a<1>,a<2>>=1; %存在边,则邻接矩阵的对应值为1 W<a<2>,a<1>>=1;endelsefprint<'Please imput the right value of f'>;W;程序三:有向图关联矩阵和邻接矩阵互换算法%有向图的关联矩阵和邻接矩阵的转换function W=mattransf<F,f>if f==0 %邻接矩阵转换为关联矩阵m=sum<sum<F>>;n=size<F,1>;W=zeros<n,m>;k=1;for i=1:nfor j=i:nif F<i,j>~=0 %由i发出的边,有向边的始点W<i,k>=1; %关联矩阵始点值为1W<j,k>=-1; %关联矩阵终点值为-1k=k+1;endendendelseif f==1 %关联矩阵转换为邻接矩阵m=size<F,2>;n=size<F,1>;W=zeros<n,n>;for i=1:ma=find<F<:,i>~=0>; %有向边的两个顶点if F<a<1>,i>==1W<a<1>,a<2>>=1; %有向边由a<1>指向a<2>elseW<a<2>,a<1>>=1; %有向边由a<2>指向a<1>endendelsefprint<'Please imput the right value of f'>;endW;第二讲:最短路问题程序0:最短距离矩阵W表示图的权值矩阵D表示图的最短距离矩阵%连通图中各项顶点间最短距离的计算function D=shortdf<W>%对于W<i,j>,若两顶点间存在弧,则为弧的权值,否则为inf;当i=j时W<i,j>=0 n=length<W>;m=1;while m<=nfor i=1:nfor j=1:nif D<i,j>>D<i,m>+D<m,j>D<i,j>+D<i,m>+D<m,j>; %距离进行更新 endendendm=m+1;endD;程序一:Dijkstra算法〔计算两点间的最短路〕function [l,z]=Dijkstra<W>n = size <W,1>;for i = 1 :nl<i>=W<1,i>;z<i>=0;endi=1;while i<=nfor j =1 :nif l<i>>l<j>+W<j,i>l<i>=l<j>+W<j,i>;z<i>=j-1;if j<ii=j-1;endendendi=i+1;end程序二:floyd算法〔计算任意两点间的最短距离〕function [d,r]=floyd<a>n=size<a,1>;d=a;for i=1:nfor j=1:nr<i,j>=j;endendr;for k=1:nfor i=1:nfor j=1:nif d<i,k>+d<k,j><d<i,j>d<i,j>=d<i,k>+d<k,j>; r<i,j>=r<i,k>;endendendend程序三:n2short.m 计算指定两点间的最短距离function [P u]=n2short<W,k1,k2>n=length<W>;U=W;m=1;while m<=nfor i=1:nfor j=1:nif U<i,j>>U<i,m>+U<m,j>U<i,j>=U<i,m>+U<m,j>;endendendm=m+1;endu=U<k1,k2>;P1=zeros<1,n>;k=1;P1<k>=k2;V=ones<1,n>*inf;kk=k2;while kk~=k1for i=1:nV<1,i>=U<k1,kk>-W<i,kk>;if V<1,i>==U<k1,i>P1<k+1>=i;kk=i;k=k+1;endendendk=1;wrow=find<P1~=0>;for j=length<wrow>:-1:1P<k>=P1<wrow<j>>;k=k+1;endP;程序四、n1short.m<计算某点到其它所有点的最短距离> function[Pm D]=n1short<W,k>n=size<W,1>;D=zeros<1,n>;for i=1:n[P d]=n2short<W,k,i>;Pm{i}=P;D<i>=d;end程序五:pass2short.m<计算经过某两点的最短距离> function [P d]=pass2short<W,k1,k2,t1,t2>[p1 d1]=n2short<W,k1,t1>;[p2 d2]=n2short<W,t1,t2>;[p3 d3]=n2short<W,t2,k2>;dt1=d1+d2+d3;[p4 d4]=n2short<W,k1,t2>;[p5 d5]=n2short<W,t2,t1>;[p6 d6]=n2short<W,t1,k2>;dt2=d4+d5+d6;if dt1<dt2d=dt1;P=[p1 p2<2:length<p2>> p3<2:length<p3>>]; elsed=dt1;p=[p4 p5<2:length<p5>> p6<2:length<p6>>]; endP;d;第三讲:最小生成树程序一:最小生成树的Kruskal算法function [T c]=krusf<d,flag>if nargin==1n=size<d,2>;m=sum<sum<d~=0>>/2;b=zeros<3,m>;k=1;for i=1:nfor j=<i+1>:nif d<i,j>~=0b<1,k>=i;b<2,k>=j;b<3,k>=d<i,j>;k=k+1;endendendelseb=d;endn=max<max<b<1:2,:>>>;m=size<b,2>;[B,i]=sortrows<b',3>;B=B';c=0;T=[];k=1;t=1:n;for i=1:mif t<B<1,i>>~=t<B<2,i>>T<1:2,k>=B<1:2,i>;c=c+B<3,i>;k=k+1;tmin=min<t<B<1,i>>,t<B<2,i>>>; tmax=max<t<B<1,i>>,t<B<2,i>>>; for j=1:nif t<j>==tmaxt<j>=tmin;endendendif k==nbreak;endendT;c;程序二:最小生成树的Prim算法function [T c]=Primf<a>l=length<a>;a<a==0>=inf;k=1:l;listV<k>=0;listV<1>=1;e=1;while <e<l>min=inf;for i=1:lif listV<i>==1for j=1:lif listV<j>==0 & min>a<i,j>min=a<i,j>;b=a<i,j>;s=i;d=j;endendendendlistV<d>=1;distance<e>=b;source<e>=s;destination<e>=d;e=e+1;endT=[source;destination];for g=1:e-1c<g>=a<T<1,g>,T<2,g>>;endc;第四讲:Euler图和Hamilton图程序一:Fleury算法〔在一个Euler图中找出Euler环游〕注:包括三个文件;fleuf1.m, edf.m, flecvexf.mfunction [T c]=fleuf1<d>%注:必须保证是Euler环游,否则输出T=0,c=0n=length<d>;b=d;b<b==inf>=0;b<b~=0>=1;m=0;a=sum<b>;eds=sum<a>/2;ed=zeros<2,eds>;vexs=zeros<1,eds+1>;matr=b;for i=1:nif mod<a<i>,2>==1m=m+1;endendif m~=0fprintf<'there is not exit Euler path.\n'>T=0;c=0;endif m==0vet=1;flag=0;t1=find<matr<vet,:>==1>;for ii=1:length<t1>ed<:,1>=[vet,t1<ii>];vexs<1,1>=vet;vexs<1,2>=t1<ii>;matr<vexs<1,2>,vexs<1,1>>=0;flagg=1;tem=1;while flagg[flagg ed]=edf<matr,eds,vexs,ed,tem>;tem=tem+1;if ed<1,eds>~=0 & ed<2,eds>~=0T=ed;T<2,eds>=1;c=0;for g=1:edsc=c+d<T<1,g>,T<2,g>>;endflagg=0;break;endendendendfunction[flag ed]=edf<matr,eds,vexs,ed,tem>flag=1;for i=2:eds[dvex f]=flecvexf<matr,i,vexs,eds,ed,tem>;if f==1flag=0;break;endif dvex~=0ed<:,i>=[vexs<1,i> dvex];vexs<1,i+1>=dvex;matr<vexs<1,i+1>,vexs<1,i>>=0;elsebreak;endendfunction [dvex f]=flecvexf<matr,i,vexs,eds,ed,temp> f=0;edd=find<matr<vexs<1,i>,:>==1>;dvex=0;dvex1=[];ded=[];if length<edd>==1dvex=edd;elsedd=1;dd1=0;kkk=0;for kk=1:length<edd>m1=find<vexs==edd<kk>>;if sum<m1>==0dvex1<dd>=edd<kk>;dd=dd+1;dd1=1;elsekkk=kkk+1;endendif kkk==length<edd>tem=vexs<1,i>*ones<1,kkk>;edd1=[tem;edd];for l1=1:kkklt=0;ddd=1;for l2=1:edsif edd1<1:2,l1>==ed<1:2,l2>lt=lt+1;endendif lt==0ded<ddd>=edd<l1>;ddd=ddd+1;endendendif temp<=length<dvex1>dvex=dvex1<temp>;elseif temp>length<dvex1> & temp<=length<ded>dvex=ded<temp>;elsef=1;endend程序二:Hamilton改良圈算法〔找出比较好的Hamilton路〕function [C d1]= hamiltonglf<v>%d表示权值矩阵%C表示算法最终找到的Hamilton圈.%v =[ 51 67;37 84;41 94;2 99;18 54;4 50;24 42;25 38;13 40;7 64;22 60;25 62;18 40;41 26];n=size<v,1>;subplot<1,2,1>hold on;plot <v<:,1>,v<:,2>,'*'>; %描点for i=1:nstr1='V';str2=num2str<i>;dot=[str1,str2];text<v<i,1>-1,v<i,2>-2,dot>; %给点命名endplot <v<:,1>,v<:,2>>;%连线plot<[v<n,1>,v<1,1>],[v<n,2>,v<1,2>]>;for i =1:nfor j=1:nd<i,j>=sqrt<<v<i,1>-v<j,1>>^2+<v<i,2>-v<j,2>>^2>;endendd2=0;for i=1:nif i<nd2=d2+d<i,i+1>;elsed2=d2+d<n,1>;endendtext<10,30,num2str<d2>>;n=size<d,2>;C=[linspace<1,n,n> 1];for nnn=1:20C1=C;if n>3for m=4:n+1for i=1:<m-3>for j=<i+2>:<m-1>if<d<C<i>,C<j>>+d<C<i+1>,C<j+1>><d<C<i>,C<i+1>>+d<C<j>,C<j+1>>>C1<1:i>=C<1:i>;for k=<i+1>:jC1<k>=C<j+i+1-k>;endC1<<j+1>:m>=C<<j+1>:m>;endendendendelseif n<=3if n<=2fprint<'It does not exist Hamilton circle.'>; elsefprint<'Any cirlce is the right answer.'>;endendC=C1;d1=0;for i=1:nd1=d1+d<C<i>,C<i+1>>;endd1;endsubplot<1,2,2>;hold on;plot <v<:,1>,v<:,2>,'*'>; %描点for i=1:nstr1='V';str2=num2str<i>;dot=[str1,str2];text<v<i,1>-1,v<i,2>-2,dot>; %给点命名endv2=[v;v<1,1>,v<1,2>];plot<v<C<:>,1>,v<C<:>,2>,'r'>;text<10,30,num2str<d1>>;第五讲:匹配问题与算法程序一:较大基础匹配算法function J=matgraf<W>n=size<W,1>;J=zeros<n,n>;while sum<sum<W>>~=0a=find<W~=0>;t1=mod<a<1>,n>;if t1==0t1=n;endif a<1>/n>floor<a<1>/n>t2=floor<a<1>/n>+1;elset2=floor<a<1>/n>;endJ<t1,t2>=1,J<t2,t1>=1;W<t1,:>=0;W<t2,:>=0;W<:,t1>=0;W<:,t2>=0;endJ;程序二:匈牙利算法〔完美匹配算法,包括三个文件fc01,fc02,fc03〕function [e,s]=fc01<a,flag>if nargin==1flag=0;endb=a;if flag==0cmax=max<max<b>'>;b=cmax-b;endm=size<b>;for i =1:m<1>b<i,:>=b<i,:>-min<b<i,:>>;endfor j=1:m<2>b<:,j>=b<:,j>-min<b<:,j>>;endd=<b==0>;[e,total]=fc02<d>;while total~=m<1>b=fc03<b,e>;d=<b==0>;[e,total]=fc02<d>;endinx=sub2ind<size<a>,e<:,1>,e<:,2>>;e=[e,a<inx>];s=sum<a<inx>>;function [e,total]=fc02<d>total=0;m=size<d>;e=zeros<m<1>,2>;t=sum<sum<d>'>;nump=sum<d'>;while t~=0[s,inp]=sort<nump>;inq=find<s>;ep=inp<inq<1>>;inp=find<d<ep,:>>;numq=sum<d<:,inp>>;[s,inq]=sort<numq>;eq=inp<inq<1>>;total=total+1;e<total,:>=[ep,eq];inp=find<d<:,eq>>;nump<inp>=nump<inp>-1;nump<ep>=0;t=t-sum<d<ep,:>>-sum<d<:,eq>>+1;d<ep,:>=0*d<ep,:>;d<:,eq>=0*d<:,eq>;endfunction b=fc03<b,e>m=size<b>;t=1;p=ones<m<1>,1>;q=zeros<m<1>,1>;inp=find<e<:,1>~=0>;p<e<inp,1>>=0;while t~=0tp=sum<p+q>;inp=find<p==1>;n=size<inp>;for i=1:n<1>inq=find<b<inp<i>,:>==0>;q<inq>=1;endinp=find<q==1>;n=size<inp>;for i=1:n<1>if all<e<:,2>-inp<i>>==0inq=find<<e<:,2>-inp<i>>==0>;p<e<inq>>=1;endendtq=sum<p+q>;t=tq-tp;endinp=find<p==1>;inq=find<q==0>;cmin=min<min<b<inp,inq>>'>;inq=find<q==1>;b<inp,:>=b<inp,:>-cmin;b<:,inq>=b<:,inq>+cmin;第六讲:最大流最小费用问题程序一:2F算法<Ford-Fulkerson算法>,求最大流%C=[0 5 4 3 0 0 0 0;0 0 0 0 5 3 0 0;0 0 0 0 0 3 2 0;0 0 0 0 0 0 2 0; %0 0 0 0 0 0 0 4;0 0 0 0 0 0 0 3;0 0 0 0 0 0 0 5;0 0 0 0 0 0 0 0 ] function [f wf]=fulkersonf<C,f1>%C表示容量%f1表示当前流量,默认为0%f表示最大流±íʾ×î´óÁ÷%wf表示最大流的流量n=length<C>;if nargin==1;f=zeros<n,n>;elsef=f1;endNo=zeros<1,n>;d=zeros<1,n>;while <1>No<1>=n+1;d<1>=Inf;while <1>pd=1;for <i=1:n>if <No<i>>for <j=1:n>if <No<j>==0 & f<i,j><C<i,j>>No<j>=i;d<j>=C<i,j>-f<i,j>;pd=0;if <d<j>>d<i>>d<j>=d<i>;endelseif <No<j>==0 & f<j,i>>0>No<j>=-i;d<j>=f<j,i>;pd=0;if <d<j>>d<i>>d<j>=d<i>;endendendendendif <No<n>|pd>break;endendif <pd>break;enddvt=d<n>;t=n;while <1>if<No<t>>0>f<No<t>,t>=f<No<t>,t>+dvt;elseif <No<t><0>f<No<t>,t>=f<No<t>,t>-dvt;endif <No<t>==1>for <i=1:n>No<i>=0;d<i>=0;endbreakendt=No<t>;endendwf=0;for <j=1:n>wf=wf+f<1,j>;endf;wf;程序二:Busacker-Gowan算法<求最大流最小费用>%C=[0 15 16 0 0;0 0 0 13 14;0 11 0 17 0;0 0 0 0 8;0 0 0 0 0] %b=[0 4 1 0 0;0 0 0 6 1;0 2 0 3 0;0 0 0 0 2;0 0 0 0 0]%function [f wf zwf]=BGf<C,b>%C表示弧容量矩阵%b表示弧上单位流量的费用%f表示最大流最小费用矩阵%wf最大流量%zwf表示最小费用n=size<C,2>;wf=0;wf0=inf;f=zeros<n,n>;while <1>a=ones<n,n>*inf;for <i=1:n>a<i,i>=0;endfor <i=1:n>for <j=1:n>if<C<i,j>>0 & f<i,j>==0>a<i,j>=b<i,j>;elseif <C<i,j>>0 & f<i,j>==C<i,j>>a<j,i>=-b<i,j>;elseif <C<i,j>>0>a<i,j>=b<i,j>;a<j,i>=-b<i,j>;endendendfor <i=2:n>p<i>=inf;s<i>=i;endfor <k=1:n>pd=1;for <i=2:n>for <j=1:n>if <p<i>>p<j>+a<j,i>>p<i>=p<j>+a<j,i>;s<i>=j;pd=0; endendendif <pd>break;endendif <p<n>==inf>break;enddvt=inf;t=n;while <1>if <a<s<t>,t>>0>dvtt=C<s<t>,t>-f<s<t>,t>;elseif <a<s<t>,t><0>dvtt=f<t,s<t>>;endif <dvt>dvtt>dvt=dvtt;endif <s<t>==1>break;endt=s<t>;endpd=0;if <wf+dvt>=wf0>dvt=wf0-wf;pd=1;endt=n;while <1>if <a<s<t>,t>>0>f<s<t>,t>=f<s<t>,t>+dvt; elseif <a<s<t>,t><0>f<<t>,s<t>>=f<t,s<t>>-dvt; endif <s<t>==1>break;endt=s<t>;endif <pd>break;endwf=0;for <j=1:n>wf=wf+f<1,j>;endendzwf=0;for <i=1:n>for <j=1:n>zwf=zwf+b<i,j>*f<i,j>;endendf;。
由邻接矩阵求可达矩阵例题
由邻接矩阵求可达矩阵例题哎,今天我们来聊聊可达矩阵这个有趣的概念,听起来有点高大上对吧?其实这就像我们在城市里导航一样,想知道从一个地方到另一个地方怎么走。
想象一下,你在一个陌生的城市,突然发现所有的街道都是一条条线,把不同的地方连接在一起。
这个时候,邻接矩阵就像是地图上那些清晰的路线图,告诉你哪些地方是可以直接到达的,哪些地方可能要绕个大圈。
你看,这个邻接矩阵就是一个方方正正的表格,每个地方都用数字表示,简单明了,就像我们玩连连看一样,黑白分明。
当我们有了这个邻接矩阵,接下来要做的就是把它变成可达矩阵。
你可别小看这个过程,听起来简单,但实际上就像是在做一场大扫除,把所有可以到达的路径都理顺。
想想,如果一个点可以到达另一个点,那它的邻居也应该可以直接或间接地到达。
这就好比你有一个朋友,认识了另一个朋友,那么这个新朋友也可能认识更多的人。
这种“认识”的关系,就在我们的可达矩阵里变得清晰可见。
好啦,接下来我们看看具体的操作。
我们先把邻接矩阵写出来,假设有五个地方,分别用数字1到5表示。
邻接矩阵的每一行每一列都代表一个地方,如果两个地方可以直接到达,咱们就在对应的位置填个1,否则就填0。
这样,我们的邻接矩阵就做好了。
我们就得开始填可达矩阵。
这个过程就像拼图,先从那些能直接到达的地方开始,然后一点一点扩展,慢慢把所有可能的路径都找出来。
想象一下,你在城市中开车,从A点出发,经过B点到达C点,再从C点经过D 点,最后到达E点。
这个时候,我们就在可达矩阵里,把这些路径统统标上。
每找到一条新路,就像发现了一条新的小巷子,心里那个美呀,恨不得立马跟朋友分享。
等到我们把所有的可能性都找齐,最后得到的可达矩阵就像是一张无敌地图,所有的路径都清清楚楚,不再迷路。
哎,难免会遇到一些坑,比如说,有些地方可能是一条死胡同,根本就无法到达。
这个时候,我们就要小心了。
可达矩阵里,这些地方会被标记为不可达,咱们的地图上就得留个心眼,避免走错路。
可达矩阵excel算法
可达矩阵excel算法可达矩阵excel算法是一种在Excel中用于判断两个节点之间是否存在路径的算法。
在Excel表格中,我们可以使用矩阵来表示图的连通关系,其中每个单元格的值代表两个节点之间的距离或路径信息。
在可达矩阵excel算法中,我们需要首先创建一个矩阵,并将所有节点之间的初始距离或路径信息填入矩阵中。
然后,通过迭代的方式逐步更新矩阵中的数值,直到所有节点之间的最短路径或可达性信息都被计算出来。
算法的核心思想是利用动态规划的思想,通过不断更新矩阵中的数值,来求解所有节点之间的最短路径或可达性信息。
具体步骤如下:1. 初始化矩阵:将所有节点之间的初始距离或路径信息填入矩阵中。
如果两个节点之间存在直接连接,则将距离或路径信息填入矩阵对应的单元格中;如果两个节点之间不存在直接连接,则将一个较大的数值(如无穷大)填入矩阵对应的单元格中。
2. 迭代更新矩阵:通过迭代的方式逐步更新矩阵中的数值,直到所有节点之间的最短路径或可达性信息都被计算出来。
具体的更新策略是,对于矩阵中的每个单元格(i, j),将其值更新为min(matrix[i, j], matrix[i, k] + matrix[k, j]),其中k表示当前正在计算的节点。
3. 输出结果:最终得到的矩阵即为所有节点之间的最短路径或可达性信息。
我们可以根据需要,将矩阵中的数值转化为具体的路径或距离信息,并进行进一步的分析和应用。
可达矩阵excel算法的优点是简单易懂、实现方便。
它可以应用于各种需要判断节点之间是否存在路径或计算最短路径的问题,比如网络路由、城市路径规划等。
在实际应用中,我们可以根据需要进行算法的优化,以提高计算效率和准确性。
总结起来,可达矩阵excel算法是一种在Excel中判断两个节点之间是否存在路径的算法。
它通过创建和更新矩阵的方式,计算出所有节点之间的最短路径或可达性信息。
该算法简单易懂、实现方便,可以广泛应用于各种路径规划和网络路由等问题中。
邻接矩阵与可达矩阵计算
1 1 0 0 1 1 1 1 0 0 0 1 1 0 0 0 0 1 0 0 0 1 1 1 0
1 1 1 0 1 1 1 0 0 1 1 0 0 0 1 0 0 1 1 1
k 1 k a a 因此,表达式 ij ir aij 右端表示每一项 n
由Vi经过一条长度为k的链到Vr,再由Vr经过一 条边到Vj的,总长度为k+1的链的数目。
r 1
1. 邻接矩阵
邻接矩阵乘幂表达的信息
k 1 a 对r进行求和,即得 ij ,表示所有从Vi
到Vj长度为k+1的链的数目。
暨南大学应急管理学院
1. 邻接矩阵
本部分内容出自《离散数学》图论章节
1. 邻接矩阵
邻接矩阵的定义
设G=<V,E>是一个简单图,它有n个结 点V={v1,v2,…,vn},则n阶方阵A(G)= (aij)称为G的邻接矩阵。
1
aij
0
Vi与Vj之间存在关系; Vi与Vj之间没有关系或者相同;
1. 邻接矩阵
2. 可达矩阵
可达矩阵的性质
可达矩阵表明了图中任意两结点间是否至少 存在一条链以及在节点处是否有回路。 B = ( A + I )n 表示两个结点之间经过n步是 否能够联通的情况。
2. 可达矩阵
可达矩阵布尔计算方法 •布尔矩阵定义:矩阵中的元素属于0或1的 矩阵; •图的邻接矩阵是一种典型的布尔矩阵; •图的可达矩阵也是一种布尔矩阵;
假设,当l=k时,定理成立,考察l=k+1的 情形如下:
Ak 1 Ak A
即: a
k 1 ij
a arj
r 1 k ir
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
传递闭包Warshall方法计算可达矩阵简要介绍
①在集合X上的二元关系R的传递闭包是包含R的X上的最小的传递关系。
R的传递闭包在数字图像处理的图像和视觉基础、图的连通性描述等方面都是基本概念。
一般用B表示定义在具有n个元素的集合X上关系R的n×n二值矩阵,则传递闭包的矩阵B+可如下计算: B+ =
B + B2 + B3 + ……+ (B)n
②式中矩阵运算时所有乘法都用逻辑与代替,所有加法都用逻辑或代替。
上式中的操作次序为B,B(B),B(BB),B(BBB),……,所以在运算的每一步我们只需简单地把现有结果乘以B,完成矩阵的n次乘法即可。
/ism/cal_warshall_get_r_mat_detail.php
Warshall在1962年提出了一个求关系的传递闭包的有效算法。
其具体过程如下,设在n个元素的有限集上关系R的关系矩阵为M:(1)置新矩阵A=M;
(2)置k=1;
(3)对所有i如果A[i,k]=1,则对j=1..n执行:
A[i,j]←A[i,j]∨A[k,j];
(4)k增1;
(5)如果k≤n,则转到步骤(3),否则停止。
所得的矩阵A即为关系R的传递闭包t(R)的关系矩阵。
在《离散数学》中都提及了该算法。
Warshall算法映射到有向图中
设关系R的关系图为G,设图G的所有顶点为u1,u2,…,un,则t(R)的关系图可用该方法得到:若G中任意两顶点ui和uj之间有一条路径且没有ui到uj的弧,则在图G中增加一条从ui到uj的弧,将这样改造后的图记为G’,则G’即为t(R)的关系图。
G’的邻接矩阵A应满足:若图G中存在从ui到uj路径,即ui与uj连通,则A[i,j]=1,否则
A[i,j]=0。
这样,求t(R)的问题就变为求图G中每一对顶点间是否连通的问题。
相乘矩阵,就为所有节点的关系图,也就是当前条件下的关系矩阵。
对于相乘矩阵,进行叠代,叠代的过程为,行取值,然后计算值中对应的每一行的值取并集,得到当前行的关系集合。
取完所有行,得到了一个新的转移矩阵再对转移矩阵进行进行求解。
Warshall的叠代次数比逐次平方法的运行效率要高。
如果图中的顶点是有序的排列,只要进行一次Warshall运算就可以获得可达矩阵。
您输入原始矩阵 matrix_A 为一个方阵结果如下
第 1 次迭代
当前0号要素 a 的可达集合(b,f,a )
1号要素 b 的可达集合c,e,b
5号要素 f 的可达集合c,f
0号要素 a 的可达集合b,f,a
当前0号要素 a 的可达集合(b,f,a,c,e )
当前1号要素 b 的可达集合(c,e,b )
2号要素 c 的可达集合b,c
4号要素 e 的可达集合f,e
1号要素 b 的可达集合c,e,b
当前1号要素 b 的可达集合(c,e,b,f )
当前2号要素 c 的可达集合(b,c )
1号要素 b 的可达集合c,e,b,f
2号要素 c 的可达集合b,c
当前2号要素 c 的可达集合(b,c,e,f )
当前3号要素 d 的可达集合(a,d )
0号要素 a 的可达集合b,f,a,c,e
3号要素 d 的可达集合a,d
当前3号要素 d 的可达集合(a,d,b,f,c,e )
当前4号要素 e 的可达集合(f,e )
5号要素 f 的可达集合c,f
4号要素 e 的可达集合f,e
当前4号要素 e 的可达集合(f,e,c )
当前5号要素 f 的可达集合(c,f )
2号要素 c 的可达集合b,c,e,f
5号要素 f 的可达集合c,f
当前5号要素 f 的可达集合(c,f,b,e )
当前6号要素 g 的可达集合(b,g )
1号要素 b 的可达集合c,e,b,f
6号要素 g 的可达集合b,g
当前6号要素 g 的可达集合(b,g,c,e,f )第 1 次迭代得到的转移矩阵如下:
第 2 次迭代
当前0号要素 a 的可达集合(b,f,a,c,e )
1号要素 b 的可达集合c,e,b,f
5号要素 f 的可达集合c,f,b,e
0号要素 a 的可达集合b,f,a,c,e
2号要素 c 的可达集合b,c,e,f
4号要素 e 的可达集合f,e,c
当前0号要素 a 的可达集合(b,f,a,c,e )
当前1号要素 b 的可达集合(c,e,b,f )
2号要素 c 的可达集合b,c,e,f
4号要素 e 的可达集合f,e,c
1号要素 b 的可达集合c,e,b,f
5号要素 f 的可达集合c,f,b,e
当前1号要素 b 的可达集合(c,e,b,f )
当前2号要素 c 的可达集合(b,c,e,f )
1号要素 b 的可达集合c,e,b,f
2号要素 c 的可达集合b,c,e,f
4号要素 e 的可达集合f,e,c
5号要素 f 的可达集合c,f,b,e
当前2号要素 c 的可达集合(b,c,e,f )
当前3号要素 d 的可达集合(a,d,b,f,c,e )
0号要素 a 的可达集合b,f,a,c,e
3号要素 d 的可达集合a,d,b,f,c,e
1号要素 b 的可达集合c,e,b,f
5号要素 f 的可达集合c,f,b,e
2号要素 c 的可达集合b,c,e,f
4号要素 e 的可达集合f,e,c
当前3号要素 d 的可达集合(a,d,b,f,c,e )
当前4号要素 e 的可达集合(f,e,c )
5号要素 f 的可达集合c,f,b,e
4号要素 e 的可达集合f,e,c
2号要素 c 的可达集合b,c,e,f
当前4号要素 e 的可达集合(f,e,c,b )
当前5号要素 f 的可达集合(c,f,b,e )
2号要素 c 的可达集合b,c,e,f
5号要素 f 的可达集合c,f,b,e
1号要素 b 的可达集合c,e,b,f
4号要素 e 的可达集合f,e,c,b
当前5号要素 f 的可达集合(c,f,b,e )
当前6号要素 g 的可达集合(b,g,c,e,f )
1号要素 b 的可达集合c,e,b,f
6号要素 g 的可达集合b,g,c,e,f
2号要素 c 的可达集合b,c,e,f
5号要素 f 的可达集合c,f,b,e
当前6号要素 g 的可达集合(b,g,c,e,f )第 2 次迭代得到的转移矩阵如下:
第 3 次迭代
当前0号要素 a 的可达集合(b,f,a,c,e ) 1号要素 b 的可达集合c,e,b,f
5号要素 f 的可达集合c,f,b,e
0号要素 a 的可达集合b,f,a,c,e
4号要素 e 的可达集合f,e,c,b
当前0号要素 a 的可达集合(b,f,a,c,e )
当前1号要素 b 的可达集合(c,e,b,f )
2号要素 c 的可达集合b,c,e,f
4号要素 e 的可达集合f,e,c,b
1号要素 b 的可达集合c,e,b,f
5号要素 f 的可达集合c,f,b,e
当前1号要素 b 的可达集合(c,e,b,f )
当前2号要素 c 的可达集合(b,c,e,f )
1号要素 b 的可达集合c,e,b,f
2号要素 c 的可达集合b,c,e,f
4号要素 e 的可达集合f,e,c,b
5号要素 f 的可达集合c,f,b,e
当前2号要素 c 的可达集合(b,c,e,f )
当前3号要素 d 的可达集合(a,d,b,f,c,e ) 0号要素 a 的可达集合b,f,a,c,e
3号要素 d 的可达集合a,d,b,f,c,e
1号要素 b 的可达集合c,e,b,f
5号要素 f 的可达集合c,f,b,e
2号要素 c 的可达集合b,c,e,f
4号要素 e 的可达集合f,e,c,b
当前3号要素 d 的可达集合(a,d,b,f,c,e )
当前4号要素 e 的可达集合(f,e,c,b )
5号要素 f 的可达集合c,f,b,e
4号要素 e 的可达集合f,e,c,b
2号要素 c 的可达集合b,c,e,f
1号要素 b 的可达集合c,e,b,f
当前4号要素 e 的可达集合(f,e,c,b )
当前5号要素 f 的可达集合(c,f,b,e )
2号要素 c 的可达集合b,c,e,f
5号要素 f 的可达集合c,f,b,e
1号要素 b 的可达集合c,e,b,f
4号要素 e 的可达集合f,e,c,b
当前5号要素 f 的可达集合(c,f,b,e )
当前6号要素 g 的可达集合(b,g,c,e,f )
1号要素 b 的可达集合c,e,b,f
6号要素 g 的可达集合b,g,c,e,f
2号要素 c 的可达集合b,c,e,f
4号要素 e 的可达集合f,e,c,b
5号要素 f 的可达集合c,f,b,e
当前6号要素 g 的可达集合(b,g,c,e,f )
第 3 次迭代得到的转移矩阵如下:。