(完整版)大学物理(第四版)课后习题及答案机械振动
(完整版)机械振动习题答案
机械振动测验一、填空题1、 所谓振动,广义地讲,指一个物理量在它的①平均值附近不停地经过②极大值和③极小值而往复变化。
2、 一般来说,任何具有④弹性和⑤惯性的力学系统均可能产生机械振动。
3、 XXXX 在机械振动中,把外界对振动系统的激励或作用,①激励或输入;而系统对外界影响的反应,称为振动系统的⑦响应或输出。
4、 常见的振动问题可以分成下面几种基本课题:1、振动设计2、系统识别3、环境预测5、 按激励情况分类,振动分为:①自由振动和②强迫振动;按响应情况分类,振动分为:③简谐振动、④周期振动和⑤瞬态振动。
6、 ①惯性元件、②弹性元件和③阻尼元件是离散振动系统三个最基本的元件。
7、 在系统振动过程中惯性元件储存和释放①动能,弹性元件储存和释放②势能,阻尼元件③耗散振动能量。
8、 如果振动时系统的物理量随时间的变化为简谐函数,称此振动为①简谐振动。
9、 常用的度量振动幅值的参数有:1、峰值2、平均值3、均方值4、均方根值。
10、 系统的固有频率只与系统的①质量和②刚度有关,与系统受到的激励无关。
二、 试证明:对数衰减率也可以用下式表示,式中n x 是经过n 个循环后的振幅。
1ln nx xn δ=三、 求图示振动系统的固有频率和振型。
已知12m m m ==,123k k k k ===。
北京理工大学1996年研究生入学考试理论力学(含振动理论基础)试题自己去查双(二)自由度振动J,在平面上在弹簧k的限制下作纯滚动,如图所示,四、圆筒质量m。
质量惯性矩o求其固有频率。
五、物块M质量为m1。
滑轮A与滚子B的半径相等,可看作质量均为m2、半径均为r的匀质圆盘。
斜面和弹簧的轴线均与水平面夹角为β,弹簧的刚度系数为k。
又m1 g>m2 g sinβ , 滚子B作纯滚动。
试用能量法求:(1)系统的微分方程;(2)系统的振动周期。
六、在下图所示系统中,已知m和k。
计算系统的基频。
大学物理课后习题答案第四章
第四章机械振动4.1一物体沿x 轴做简谐振动,振幅A = 0.12m ,周期T = 2s .当t = 0时,物体的位移x = 0.06m ,且向x 轴正向运动.求:(1)此简谐振动的表达式;(2)t = T /4时物体的位置、速度和加速度;(3)物体从x = -0.06m ,向x 轴负方向运动第一次回到平衡位置所需的时间. [解答](1)设物体的简谐振动方程为x = A cos(ωt + φ),其中A = 0.12m ,角频率ω = 2π/T = π.当t = 0时,x = 0.06m ,所以cos φ = 0.5,因此φ = ±π/3. 物体的速度为v = d x /d t = -ωA sin(ωt + φ).当t = 0时,v = -ωA sin φ,由于v > 0,所以sin φ< 0,因此:φ = -π/3.简谐振动的表达式为:x = 0.12cos(πt – π/3).(2)当t = T /4时物体的位置为;x = 0.12cos(π/2 – π/3) = 0.12cosπ/6 = 0.104(m). 速度为;v = -πA sin(π/2 – π/3) = -0.12πsinπ/6 = -0.188(m·s -1).加速度为:a = d v /d t = -ω2A cos(ωt + φ)= -π2A cos(πt - π/3)= -0.12π2cosπ/6 = -1.03(m·s -2). (3)方法一:求时间差.当x = -0.06m 时,可得cos(πt 1 - π/3) = -0.5, 因此πt 1 - π/3 = ±2π/3.由于物体向x 轴负方向运动,即v < 0,所以sin(πt 1 - π/3) > 0,因此πt 1 - π/3 = 2π/3,得t 1 = 1s .当物体从x = -0.06m 处第一次回到平衡位置时,x = 0,v > 0,因此cos(πt 2 - π/3) = 0, 可得 πt 2 - π/3 = -π/2或3π/2等.由于t 2> 0,所以πt 2 - π/3 = 3π/2, 可得t 2 = 11/6 = 1.83(s).所需要的时间为:Δt = t 2 - t 1 = 0.83(s).方法二:反向运动.物体从x = -0.06m ,向x 轴负方向运动第一次回到平衡位置所需的时间就是它从x = 0.06m ,即从起点向x 轴正方向运动第一次回到平衡位置所需的时间.在平衡位置时,x = 0,v < 0,因此cos(πt - π/3) = 0,可得 πt - π/3 = π/2,解得t = 5/6 = 0.83(s).[注意]根据振动方程x = A cos(ωt + φ),当t = 0时,可得φ = ±arccos(x 0/A ),(-π<φ<= π), 初位相的取值由速度决定.由于v = d x /d t = -ωA sin(ωt + φ),当t = 0时,v = -ωA sin φ,当v > 0时,sin φ< 0,因此 φ = -arccos(x 0/A );当v < 0时,sin φ> 0,因此φ = arccos(x 0/A )π/3.可见:当速度大于零时,初位相取负值;当速度小于零时,初位相取正值.如果速度等于零,当初位置x 0 = A 时,φ = 0;当初位置x 0 = -A 时,φ = π.4.2已知一简谐振子的振动曲线如图所示,试由图求:(1)a ,b ,c ,d ,e 各点的位相,及到达这些状态的时刻t 各是多少?已知周期为T ; (2)振动表达式; (3)画出旋转矢量图. [解答]方法一:由位相求时间.(1)设曲线方程为x = A cos Φ,其中A 表示振幅,Φ = ωt + φ表示相位. 由于x a = A ,所以cos Φa = 1,因此Φa = 0.由于x b = A /2,所以cos Φb = 0.5,因此Φb = ±π/3;由于位相Φ随时间t 增加,b 点位相就应该大于a 点的位相,因此Φb = π/3.由于x c = 0,所以cos Φc = 0,又由于c 点位相大于b 位相,因此Φc = π/2.同理可得其他两点位相为:Φd = 2π/3,Φe = π.c 点和a 点的相位之差为π/2,时间之差为T /4,而b 点和a 点的相位之差为π/3,时间之差应该为T /6.因为b 点的位移值与O 时刻的位移值相同,所以到达a 点的时刻为t a = T /6. 到达b 点的时刻为t b = 2t a = T /3.图4.2到达c 点的时刻为t c = t a + T /4 = 5T /12. 到达d 点的时刻为t d = t c + T /12 = T /2. 到达e 点的时刻为t e = t a + T /2 = 2T /3.(2)设振动表达式为:x = A cos(ωt + φ),当t = 0时,x = A /2时,所以cos φ = 0.5,因此φ =±π/3; 由于零时刻的位相小于a 点的位相,所以φ = -π/3, 因此振动表达式为. 另外,在O 时刻的曲线上作一切线,由于速度是位置对时间的变化率,所以切线代表速度的方向;由于其斜率大于零,所以速度大于零,因此初位相取负值,从而可得运动方程.(3)如图旋转矢量图所示.方法二:由时间求位相.将曲线反方向延长与t 轴 相交于f 点,由于x f = 0,根据运动方程,可得所以:.显然f 点的速度大于零,所以取负值,解得t f = -T /12.从f 点到达a 点经过的时间为T /4,所以到达a 点的时刻为:t a = T /4 + t f = T /6, 其位相为:. 由图可以确定其他点的时刻,同理可得各点的位相.4.3 有一弹簧,当其下端挂一质量为M 的物体时,伸长量为9.8×10-2m .若使物体上下振动,且规定向下为正方向.(1)t = 0时,物体在平衡位置上方8.0×10-2m 处,由静止开始向下运动,求运动方程;(2)t = 0时,物体在平衡位置并以0.60m·s -1速度向上运动,求运动方程. [解答]当物体平衡时,有:Mg – kx 0 = 0, 所以弹簧的倔强系数为:k = Mg/x 0, 物体振动的圆频率为:s -1). 设物体的运动方程为:x = A cos(ωt + φ).(1)当t = 0时,x 0 = -8.0×10-2m ,v 0 = 0,因此振幅为:=8.0×10-2(m);由于初位移为x 0 = -A ,所以cos φ = -1,初位相为:φ = π. 运动方程为:x = 8.0×10-2cos(10t + π).(2)当t = 0时,x 0 = 0,v 0 = -0.60(m·s -1),因此振幅为:v 0/ω|=6.0×10-2(m);由于cos φ = 0,所以φ = π/2;运动方程为:x = 6.0×10-2cos(10t +π/2).4.4 质量为10×10-3kg 的小球与轻弹簧组成的系统,按的规律作振动,式中t 以秒(s)计,x 以米(m)计.求: (1)振动的圆频率、周期、振幅、初位相; (2)振动的速度、加速度的最大值;(3)最大回复力、振动能量、平均动能和平均势能;cos(2)3t x A T ππ=-cos(2)03t T ππ-=232f t Tπππ-=±203a a t T πΦπ=-=ω==0||A x ==A =20.1cos(8)3x t ππ=+(4)画出这振动的旋转矢量图,并在图上指明t 为1,2,10s 等各时刻的矢量位置. [解答](1)比较简谐振动的标准方程:x = A cos(ωt + φ),可知圆频率为:ω =8π,周期T = 2π/ω = 1/4 = 0.25(s),振幅A = 0.1(m),初位相φ = 2π/3.(2)速度的最大值为:v m = ωA = 0.8π = 2.51(m·s -1); 加速度的最大值为:a m = ω2A = 6.4π2 = 63.2(m·s -2). (3)弹簧的倔强系数为:k = mω2,最大回复力为:f = kA = mω2A = 0.632(N); 振动能量为:E = kA 2/2 = mω2A 2/2 = 3.16×10-2(J), 平均动能和平均势能为:= kA 2/4 = mω2A 2/4 = 1.58×10-2(J). (4)如图所示,当t 为1,2,10s 等时刻时,旋转矢量的位置是相同的.4.5 两个质点平行于同一直线并排作同频率、同振幅的简谐振动.在振动过程中,每当它们经过振幅一半的地方时相遇,而运动方向相反.求它们的位相差,并作旋转矢量图表示.[解答]设它们的振动方程为:x = A cos(ωt + φ), 当x = A /2时,可得位相为:ωt + φ = ±π/3.由于它们在相遇时反相,可取Φ1 = (ωt + φ)1 = -π/3,Φ2 = (ωt + φ)2 = π/3,它们的相差为:ΔΦ = Φ2 – Φ1 = 2π/3,或者:ΔΦ` = 2π –ΔΦ = 4π/3.矢量图如图所示.4.6一氢原子在分子中的振动可视为简谐振动.已知氢原子质量m = 1.68×10-27kg ,振动频率v = 1.0×1014Hz ,振幅A = 1.0×10-11m .试计算:(1)此氢原子的最大速度; (2)与此振动相联系的能量.[解答](1)氢原子的圆频率为:ω = 2πv = 6.28×1014(rad·s -1), 最大速度为:v m = ωA = 6.28×103(m·s -1).(2)氢原子的能量为:= 3.32×10-20(J).4.7 如图所示,在一平板下装有弹簧,平板上放一质量为1.0kg 的重物,若使平板在竖直方向上作上下简谐振动,周期为0.50s ,振幅为2.0×10-2m ,求:(1)平板到最低点时,重物对平板的作用力;(2)若频率不变,则平板以多大的振幅振动时,重物跳离平板? (3)若振幅不变,则平板以多大的频率振动时,重物跳离平板? [解答](1)重物的圆频率为:ω = 2π/T = 4π,其最大加速度为:a m = ω2A ,合力为:F = ma m ,方向向上.重物受到板的向上支持力N 和向下的重力G ,所以F = N – G . 重物对平板的作用力方向向下,大小等于板的支持力: N = G + F = m (g +a m ) = m (g +ω2A ) = 12.96(N).(2)当物体的最大加速度向下时,板的支持为:N = m (g - ω2A ). 当重物跳离平板时,N = 0,频率不变时,振幅为:A = g/ω2 = 3.2×10-2(m).(3)振幅不变时,频率为:3.52(Hz).4.8 两轻弹簧与小球串连在一直线上,将两弹簧拉长后系在固定点A 和B 之间,整个系统放在光滑水平面上.设两弹簧的原长分别为l 1和l 2,倔强系统分别为k 1和k 2,A和B 间距为L ,小球的质量为m .(1)试确定小球的平衡位置;k pE E =212m E mv=2ωνπ==(2)使小球沿弹簧长度方向作一微小位移后放手,小球将作振动,这一振动是否为简谐振动?振动周期为多少?[解答](1)这里不计小球的大小,不妨设L > l 1 + l 2,当小球平衡时,两弹簧分别拉长x 1和x 2,因此得方程:L = l 1 + x 1 + l 2 + x 2;小球受左右两边的弹簧的弹力分别向左和向右,大小相等,即k 1x 1 = k 2x 2. 将x 2 = x 1k 1/k 2代入第一个公式解得:.小球离A 点的距离为:.(2)以平衡位置为原点,取向右的方向为x 轴正方向,当小球向右移动一个微小距离x 时,左边弹簧拉长为x 1 + x ,弹力大小为:f 1 = k 1(x 1 + x ), 方向向左;右边弹簧拉长为x 1 - x ,弹力大小为:f 2 = k 2(x 2 - x ), 方向向右.根据牛顿第二定律得:k 2(x 2 - x ) - k 1(x 1 + x ) = ma ,利用平衡条件得:,即小球做简谐振动.小球振动的圆频率为:.4.9如图所示,质量为10g 的子弹以速度v = 103m·s -1水平射入木块,并陷入木块中,使弹簧压缩而作简谐振动.设弹簧的倔强系数k = 8×103N·m -1,木块的质量为4.99kg ,不计桌面摩擦,试求:(1)振动的振幅;(2)振动方程.[解答](1)子弹射入木块时,由于时间很短,木块还来不及运动,弹簧没有被压缩,它们的动量守恒,即:mv = (m + M)v 0.解得子弹射入后的速度为:v 0 = mv/(m + M) = 2(m·s -1),这也是它们振动的初速度.子弹和木块压缩弹簧的过程机械能守恒,可得:(m + M ) v02/2 = kA 2/2, 所以振幅为:10-2(m). (2)振动的圆频率为:= 40(rad·s -1).取木块静止的位置为原点、向右的方向为位移x 的正方向,振动方程可设为:x = A cos(ωt + φ).当t = 0时,x = 0,可得:φ = ±π/2;由于速度为正,所以取负的初位相,因此振动方程为:x = 5×10-2cos(40t - π/2).4.10如图所示,在倔强系数为k 的弹簧下,挂一质量为M 的托盘.质量为m 的物体由距盘底高h 处自由下落与盘发生完全非弹性碰撞,而使其作简谐振动,设两物体碰后瞬时为t = 0时刻,求振动方程.[解答]物体落下后、碰撞前的速度为:物体与托盘做完全非弹簧碰撞后,根据动量守恒定律可得它们的共同速度为,这也是它们振动的初速度.设振动方程为:x = A cos(ωt + φ),211212()k x L l l k k =--+211111212()k L l x l L l l k k =+=+--+2122d ()0d xm kk x t++=ω=22T πω==A v =ω=v =0m v v m M ==+图4.9 图4.10其中圆频率为:物体没有落下之前,托盘平衡时弹簧伸长为x 1,则:x 1 = Mg/k .物体与托盘磁盘之后,在新的平衡位置,弹簧伸长为x 2,则:x 2= (M + m )g/k . 取新的平衡位置为原点,取向下的方向为正,则它们振动的初位移为x 0 = x 1 - x 2 = -mg/k .因此振幅为:初位相为:4.11 装置如图所示,轻弹簧一端固定,另一端与物体m 间用细绳相连,细绳跨于桌边定滑轮M 上,m 悬于细绳下端.已知弹簧的倔强系数为k = 50N·m -1,滑轮的转动惯量J = 0.02kg·m 2,半径R = 0.2m ,物体质量为m = 1.5kg ,取g = 10m·s -2.(1)试求这一系统静止时弹簧的伸长量和绳的张力;(2)将物体m 用手托起0.15m ,再突然放手,任物体m 下落而整个系统进入振动状态.设绳子长度一定,绳子与滑轮间不打滑,滑轮轴承无摩擦,试证物体m 是做简谐振动; (3)确定物体m 的振动周期;(4)取物体m 的平衡位置为原点,OX 轴竖直向下,设振物体m 相对于平衡位置的位移为x ,写出振动方程.[解答](1)在平衡时,绳子的张力等于物体的重力T = G = mg = 15(N).这也是对弹簧的拉力,所以弹簧的伸长为:x 0 = mg/k = 0.3(m).(2)以物体平衡位置为原点,取向下的方向为正,当物体下落x 时,弹簧拉长为x 0 + x ,因此水平绳子的张力为:T 1 = k (x 0+ x ).设竖直绳子的张力为T 2,对定滑轮可列转动方程:T 2R – T 1R = Jβ, 其中β是角加速度,与线加速度的关系是:β = a/R .对于物体也可列方程:mg - T 2 = ma . 转动方程化为:T 2 – k (x 0 + x ) = aJ/R 2,与物体平动方程相加并利用平衡条件得:a (m + J/R 2) = –kx ,可得微分方程:,故物体做简谐振动. (3)简谐振动的圆频率为:s -1). 周期为:T 2 = 2π/ω = 1.26(s).(4)设物体振动方程为:x = A cos(ωt + φ),其中振幅为:A = 0.15(m). 当t = 0时,x = -0.15m ,v 0 = 0,可得:cos φ = -1,因此φ = π或-π, 所以振动方程为:x = 0.15cos(5t + π),或x = 0.15cos(5t - π).4.12一匀质细圆环质量为m ,半径为R ,绕通过环上一点而与环平面垂直的水平光滑轴在铅垂面内作小幅度摆动,求摆动的周期.[解答]通过质心垂直环面有一个轴,环绕此轴的转动惯量为:I c = mR 2.根据平行轴定理,环绕过O 点的平行轴的转动惯量为I = I c + mR 2 = 2mR 2.当环偏离平衡位置时,重力的力矩为:M = mgR sin θ, 方向与角度θ增加的方向相反.ω=A ==00arctan v x ϕω-==222d 0d /x kx t m J R +=+ω=根据转动定理得:Iβ = -M ,即,由于环做小幅度摆动,所以sin θ≈θ,可得微分方程:. 摆动的圆频率为:周期为:4.13 重量为P 的物体用两根弹簧竖直悬挂,如图所示,各弹簧的倔强系数标明在图上.试求在图示两种情况下,系统沿竖直方向振动的固有频率.[解答](1)前面已经证明:当两根弹簧串联时,总倔强系数为k = k1k 2/(k 1 + k 2),因此固有频率为(2)前面还证明:当两根弹簧并联时,总倔强系数等于两个弹簧的倔强系数之和,因此固有频率为.4.14质量为0.25kg 的物体,在弹性力作用下作简谐振动,倔强系数k = 25N·m -1,如果开始振动时具有势能0.6J ,和动能0.2J ,求:(1)振幅;(2)位移多大时,动能恰等于势能?(3)经过平衡位置时的速度.[解答]物体的总能量为:E = E k + E p = 0.8(J).(1)根据能量公式E = kA2/2,得振幅为:.(2)当动能等于势能时,即E k = E p ,由于E = E k + E p ,可得:E = 2E p ,即,解得:= ±0.179(m). (3)再根据能量公式E = mv m2/2,得物体经过平衡位置的速度为: 2.53(m·s -1).4.15 两个频率和振幅都相同的简谐振动的x-t 曲线如图所示,求: (1)两个简谐振动的位相差;(2)两个简谐振动的合成振动的振动方程. [解答](1)两个简谐振动的振幅为:A = 5(cm), 周期为:T = 4(s),圆频率为:ω =2π/T = π/2,它们的振动方程分别为:x 1 = A cos ωt =5cosπt /2, x 2 = A sin ωt =5sinπt /2 =5cos(π/2 - πt /2)即x 2=5cos(πt /2 - π/2).位相差为:Δφ = φ2 - φ1 = -π/2. (2)由于x = x 1 + x 2 = 5cosπt /2 +5sinπt /2 = 5(cosπt /2·cosπ/4 +5sinπt /2·sinπ/4)/sinπ/4 合振动方程为:(cm).22d sin 0d I mgR tθθ+=22d 0d mgRt Iθθ+=ω=222T πω===2ωνπ===2ωνπ===A =2211222kA kx =⨯/2x =m v =cos()24x t ππ=- (b)图4.134.16 已知两个同方向简谐振动如下:,.(1)求它们的合成振动的振幅和初位相; (2)另有一同方向简谐振动x 3 = 0.07cos(10t +φ),问φ为何值时,x 1 + x 3的振幅为最大?φ为何值时,x 2 + x 3的振幅为最小?(3)用旋转矢量图示法表示(1)和(2)两种情况下的结果.x 以米计,t 以秒计.[解答](1)根据公式,合振动的振幅为:=8.92×10-2(m). 初位相为:= 68.22°.(2)要使x 1 + x 3的振幅最大,则:cos(φ– φ1) = 1,因此φ– φ1 = 0,所以:φ = φ1 = 0.6π. 要使x 2 + x 3的振幅最小,则 cos(φ– φ2) = -1,因此φ– φ2 = π,所以φ = π + φ2 = 1.2π.(3)如图所示.4.17质量为0.4kg 的质点同时参与互相垂直的两个振动:, .式中x 和y 以米(m)计,t 以秒(s)计.(1)求运动的轨道方程;(2)画出合成振动的轨迹;(3)求质点在任一位置所受的力.[解答](1)根据公式:,其中位相差为:Δφ = φ2 – φ1 = -π/2,130.05cos(10)5x t π=+210.06cos(10)5x t π=+A =11221122sin sin arctancos cos A A A A ϕϕϕϕϕ+=+0.08cos()36x t ππ=+0.06cos()33y t ππ=-2222212122cos sin x y xyA A A A ϕϕ+-∆=∆所以质点运动的轨道方程为:. (2)合振动的轨迹是椭圆.(3)两个振动的圆频率是相同的ω = π/3,质点在x 方向所受的力为,即F x = 0.035cos(πt /3 + π/6)(N).在y 方向所受的力为,即F y = 0.026cos(πt /3 - π/3)(N).用矢量表示就是,其大小为,与x 轴的夹角为θ = arctan(F y /F x ).4.18 将频率为384Hz 的标准音叉振动和一待测频率的音叉振动合成,测得拍频为3.0Hz ,在待测音叉的一端加上一小块物体,则拍频将减小,求待测音叉的固有频率.[解答]标准音叉的频率为v 0 = 384(Hz), 拍频为Δv = 3.0(Hz), 待测音叉的固有频率可能是v 1 = v 0 - Δv = 381(Hz), 也可能是v 2 = v 0 + Δv = 387(Hz).在待测音叉上加一小块物体时,相当于弹簧振子增加了质量,由于ω2 = k/m ,可知其频率将减小.如果待测音叉的固有频率v 1,加一小块物体后,其频率v`1将更低,与标准音叉的拍频将增加;实际上拍频是减小的,所以待测音叉的固有频率v 2,即387Hz .4.19示波器的电子束受到两个互相垂直的电场作用.电子在两个方向上的位移分别为x = A cos ωt 和y = A cos(ωt +φ).求在φ = 0,φ = 30º,及φ = 90º这三种情况下,电子在荧光屏上的轨迹方程.[解答]根据公式,其中Δφ = φ2 – φ1 = -π/2,而φ1 = 0,φ2 = φ.(1)当Δφ = φ = 0时,可得,质点运动的轨道方程为y = x ,轨迹是一条直线.(2)当Δφ = φ = 30º时,可得质点的轨道方程, 即,轨迹是倾斜的椭圆.(3)当Δφ = φ = 90º时,可得, 即x 2 + y 2 = A 2,质点运动的轨迹为圆.4.20三个同方向、同频率的简谐振动为,,.222210.080.06x y +=22d d x x x F ma m t==20.08cos()6m t πωω=-+22d d y y y F ma m t==20.06cos()3m t ωω=--πi+j x y F F F =F =2222212122cos sin x y xyA A A A ϕϕ+-∆=∆2222220x y xyA A A+-=222214x y A+=222/4x y A +=22221x y A A +=10.08cos(314)6x t π=+20.08cos(314)2x t π=+350.08cos(314)6x t π=+求:(1)合振动的圆频率、振幅、初相及振动表达式; (2)合振动由初始位置运动到所需最短时间(A 为合振动振幅). [解答]合振动的圆频率为:ω = 314 = 100π(rad·s -1). 设A 0 = 0.08,根据公式得:A x = A 1cos φ1 + A 2cos φ2 + A 3cos φ3 = 0,A y = A 1sin φ1 + A 2sin φ2 + A 3sin φ3 = 2A 0 = 0.16(m), 振幅为:,初位相为:φ = arctan(A y /A x ) = π/2.合振动的方程为:x = 0.16cos(100πt + π/2).(2)当时,可得:,解得:100πt + π/2 = π/4或7π/4.由于t > 0,所以只能取第二个解,可得所需最短时间为t = 0.0125s .x A =A =/2x =cos(100/2)2t ππ+。
大学物理机械的振动答案详解

机械振动答案 一、填空题 1.初位移、初速度、角频率 劲度系数、振子质量 2.4,2π 3.2:1 4.m t x )361cos(10.0ππ+= 5.2π 6.1:2 1:4 1:2 7.±A 0 8.k+0.5(k 为整数) k (k 为整数) 2k+0.5(k 为整数)9.0.173 2π10.3π )(1072m -⨯; 32π- )(1012m -⨯ 11.m t x )2cos(04.0ππ-= 二、选择题 1.B 2.D 3.C 4.B 5.B 6.D 7.C 8.D 9.B 10.D 11.B 12.C三、计算题1.解: (1)可用比较法求解.根据]4/20cos[1.0]cos[ππϕω+=+=t t A x得: 振幅0.1A m =,角频率20/rad s ωπ=,频率1/210s νωπ-==,周期1/0.1T s ν==,/4rad ϕπ=(2)2t s =时,振动相位为:20/4(40/4)t rad ϕππππ=+=+由cos x A ϕ=,sin A νωϕ=-,22cos a A x ωϕω=-=-得20.0707, 4.44/,279/x m m s a m s ν==-=-2.解(1)质点振动振幅A =0.10m.而由振动曲线可画出t 0=0 和t 1=4s时旋转矢量,如图(b ) 所示.由图可见初相3/π0-=ϕ(或3/π50=ϕ),而由()3/2/01ππω+=-t t 得1s 24/π5-=ω,则运动方程为()m 3/π24π5cos 10.0⎪⎭⎫ ⎝⎛-=t x(2)图(a )中点P 的位置是质点从A /2 处运动到正向的端点处.对应的旋转矢量图如图(c ) 所示.当初相取3/π0-=ϕ时,点P 的相位为()000=-+=p p t ωϕϕ(如果初相取成3/π50=ϕ,则点P 相应的相位应表示为()π200=-+=p p t ωϕϕ.(3) 由旋转矢量图可得()3/π0=-p t ω,则s 61.=p t . 3.解:设该物体的振动方程为)cos(ϕω+=t A x 依题意知:2//,0.06T rad s A m ωππ=== 据A x 01cos -±=ϕ得)(3/rad πϕ±= 由于00v >,应取)(3/rad πϕ-= 可得:)3/cos(06.0ππ-=t x(1)0.5t s =时,振动相位为:/3/6t rad ϕπππ=-=据22cos ,sin ,cos xA v A a A x ϕωϕωϕω==-=-=- 得20.052,0.094/,0.512/x m v m s a m s ==-=-(2)由A 旋转矢量图可知,物体从0.03x m =-m 处向x 轴负方向运动,到达平衡位置时,A 矢量转过的角度为5/6ϕπ∆=,该过程所需时间为:/0.833t s ϕω∆=∆=4.解:211k 2K P E E E A =+=() 1/2[2()/k]0.08()K P A E E m =+= 221(2)k 2/22K P K P P P E E E A E E E E E kx =+====因为,当时,有,又因为 222/20.0566()x A x A m ==±=±得:,即21(3)02K P x E E E mv ==+=过平衡点时,,此时动能等于总能量 1/2[2()/]0.8(/)K P v E E m m s =+=±5.解:(1))2cos(21ϕπ+=+=t A x x x按合成振动公式代入已知量,可得合振幅及初相为22224324cos(/2/4)10 6.4810A m ππ--=++-⨯=⨯4sin(/4)3sin(/2) 1.124cos(/4)3cos(/2)arctg rad ππϕππ+==+ 所以,合振动方程为))(12.12cos(1048.62SI t x+⨯=-π (2)当πϕϕk 21=-,即4/2ππϕ+=k 时,31x x +的振幅最大. 当πϕϕ)12(2+=-k ,即2/32ππϕ+=k 时,32x x +的振幅最小.6.解:)6/4sin(10322π-⨯=-t x )2/6/4cos(1032ππ--⨯=-t )3/24cos(1032π-⨯=-t作两振动的旋转矢量图,如图所示.由图得:合振动的振幅和初相分别为3/,2)35(πφ==-=cm cm A .合振动方程为))(3/4cos(1022SI t x π+⨯=-。
大学物理(第四版)课后习题与答案_机械振动
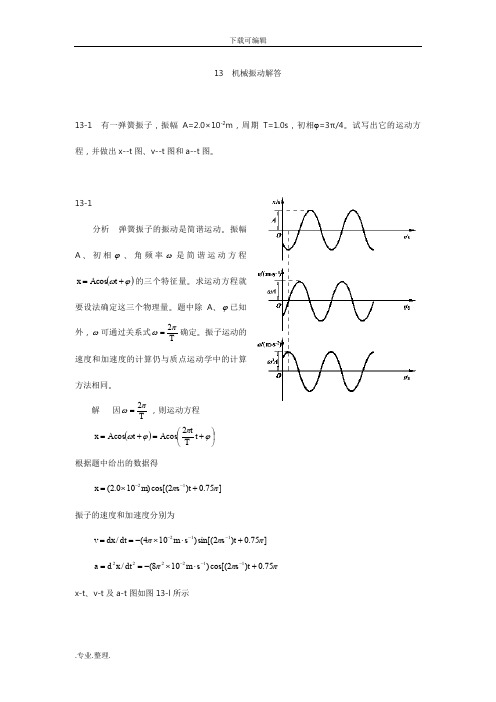
13 机械振动解答13-1 有一弹簧振子,振幅A=2.0×10-2m ,周期T=1.0s ,初相ϕ=3π/4。
试写出它的运动方程,并做出x--t 图、v--t 图和a--t 图。
13-1分析 弹簧振子的振动是简谐运动。
振幅A 、初相ϕ、角频率ω是简谐运动方程()ϕω+=t A x cos 的三个特征量。
求运动方程就要设法确定这三个物理量。
题中除A 、ϕ已知外,ω可通过关系式Tπω2=确定。
振子运动的速度和加速度的计算仍与质点运动学中的计算方法相同。
解 因Tπω2=,则运动方程()⎪⎭⎫⎝⎛+=+=ϕπϕωt T t A t A x 2cos cos根据题中给出的数据得]75.0)2cos[()100.2(12ππ+⨯=--t s m x振子的速度和加速度分别为 ]75.0)2sin[()104(/112πππ+⋅⨯-==---t s s m dt dx vπππ75.0)2cos[()108(/112222+⋅⨯-==---t s s m dt x d ax-t 、v-t 及a-t 图如图13-l 所示13-2 若简谐运动方程为⎥⎦⎤⎢⎣⎡+=-4)20(cos )01.0(1ππt s m x ,求:(1)振幅、频率、角频率、周期和初相;(2)t=2s 时的位移、速度和加速度。
13-2分析 可采用比较法求解。
将已知的简谐运动方程与简谐运动方程的一般形式()ϕω+=t A x cos 作比较,即可求得各特征量。
运用与上题相同的处理方法,写出位移、速度、加速度的表达式,代入t 值后,即可求得结果。
解 (l )将]25.0)20cos[()10.0(1ππ+=-t s m x 与()ϕω+=t A x cos 比较后可得:振幅A= 0.10 m ,角频率120-=s πω,初相πϕ25.0=,则周期 s T 1.0/2==ωπ,频率Hz T 10/1==ν。
(2)t= 2s 时的位移、速度、加速度分别为m m x 21007.7)25.040cos()10.0(-⨯=+=ππ )25.040sin()2(/1πππ+⋅-==-s m dt dx v )25.040cos()40(/2222πππ+⋅-==-s m dt x d a13-3 设地球是一个半径为R 的均匀球体,密度ρ5.5×103kg •m -3。
大学物理(第四版)课后习题及答案-机械振动
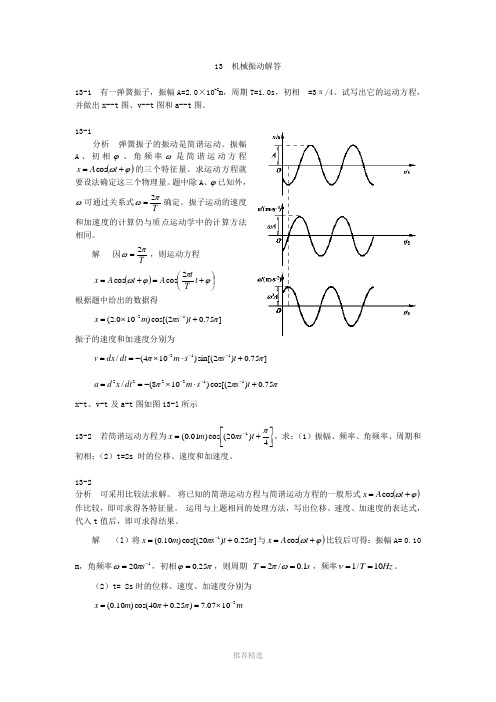
13 机械振动解答13-1 有一弹簧振子,振幅A=2.0×10-2m ,周期T=1.0s ,初相=3π/4。
试写出它的运动方程,并做出x--t 图、v--t 图和a--t 图。
13-1分析 弹簧振子的振动是简谐运动。
振幅A 、初相ϕ、角频率ω是简谐运动方程()ϕω+=t A x cos 的三个特征量。
求运动方程就要设法确定这三个物理量。
题中除A 、ϕ已知外,ω可通过关系式Tπω2=确定。
振子运动的速度和加速度的计算仍与质点运动学中的计算方法相同。
解 因Tπω2=,则运动方程()⎪⎭⎫⎝⎛+=+=ϕπϕωt T t A t A x 2cos cos根据题中给出的数据得]75.0)2cos[()100.2(12ππ+⨯=--t s m x振子的速度和加速度分别为 ]75.0)2sin[()104(/112πππ+⋅⨯-==---t s s m dt dx vπππ75.0)2cos[()108(/112222+⋅⨯-==---t s s m dt x d ax-t 、v-t 及a-t 图如图13-l 所示13-2 若简谐运动方程为⎥⎦⎤⎢⎣⎡+=-4)20(cos )01.0(1ππt s m x ,求:(1)振幅、频率、角频率、周期和初相;(2)t=2s 时的位移、速度和加速度。
13-2分析 可采用比较法求解。
将已知的简谐运动方程与简谐运动方程的一般形式()ϕω+=t A x cos 作比较,即可求得各特征量。
运用与上题相同的处理方法,写出位移、速度、加速度的表达式,代入t 值后,即可求得结果。
解 (l )将]25.0)20cos[()10.0(1ππ+=-t s m x 与()ϕω+=t A x cos 比较后可得:振幅A= 0.10 m ,角频率120-=s πω,初相πϕ25.0=,则周期 s T 1.0/2==ωπ,频率Hz T 10/1==ν。
(2)t= 2s 时的位移、速度、加速度分别为mm x 21007.7)25.040cos()10.0(-⨯=+=ππ)25.040sin()2(/1πππ+⋅-==-s m dt dx v )25.040cos()40(/2222πππ+⋅-==-s m dt x d a13-3 设地球是一个半径为R 的均匀球体,密度ρ5.5×103kg •m -3。
大学物理第五章机械振动习题解答和分析
5-1 有一弹簧振子,振幅m A 2100.2-⨯=,周期s T 0.1=,初相.4/3πϕ=试写出它的振动位移、速度和加速度方程。
分析 根据振动的标准形式得出振动方程,通过求导即可求解速度和加速度方程。
解:振动方程为:]2cos[]cos[ϕπϕω+=+=t TA t A x 代入有关数据得:30.02cos[2]()4x t SI ππ=+ 振子的速度和加速度分别是:3/0.04sin[2]()4v dx dt t SI πππ==-+ 2223/0.08cos[2]()4a d x dt t SI πππ==-+5-2若简谐振动方程为m t x ]4/20cos[1.0ππ+=,求: (1)振幅、频率、角频率、周期和初相; (2)t=2s 时的位移、速度和加速度.分析 通过与简谐振动标准方程对比,得出特征参量。
解:(1)可用比较法求解.根据]4/20cos[1.0]cos[ππϕω+=+=t t A x 得:振幅0.1A m =,角频率20/rad s ωπ=,频率1/210s νωπ-==, 周期1/0.1T s ν==,/4rad ϕπ=(2)2t s =时,振动相位为:20/4(40/4)t rad ϕππππ=+=+ 由cos x A ϕ=,sin A νωϕ=-,22cos a A x ωϕω=-=-得 20.0707, 4.44/,279/x m m s a m s ν==-=-5-3质量为kg 2的质点,按方程))](6/(5sin[2.0SI t x π-=沿着x 轴振动.求: (1)t=0时,作用于质点的力的大小;(2)作用于质点的力的最大值和此时质点的位置.分析 根据振动的动力学特征和已知的简谐振动方程求解,位移最大时受力最大。
解:(1)跟据x m ma f 2ω-==,)]6/(5sin[2.0π-=t x 将0=t 代入上式中,得: 5.0f N =(2)由x m f 2ω-=可知,当0.2x A m =-=-时,质点受力最大,为10.0f N =5-4为了测得一物体的质量m ,将其挂到一弹簧上并让其自由振动,测得振动频率Hz 0.11=ν;而当将另一已知质量为'm 的物体单独挂到该弹簧上时,测得频率为Hz 0.22=ν.设振动均在弹簧的弹性限度内进行,求被测物体的质量.分析 根据简谐振动频率公式比较即可。
4.大学物理机械振动习题解答
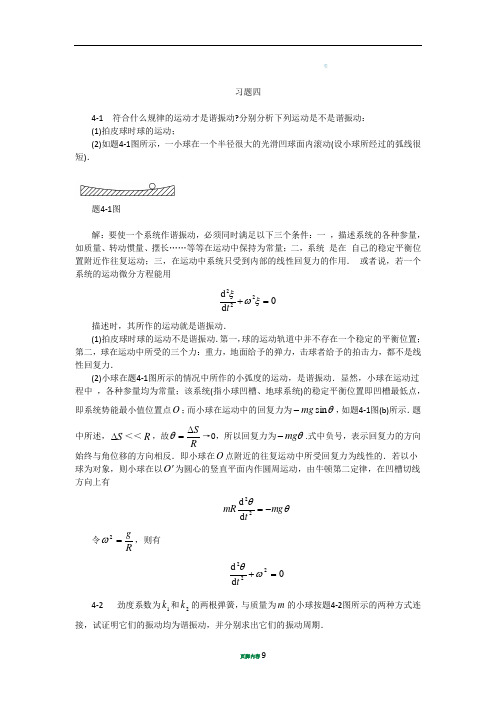
习题四4-1 符合什么规律的运动才是谐振动?分别分析下列运动是不是谐振动: (1)拍皮球时球的运动;(2)如题4-1图所示,一小球在一个半径很大的光滑凹球面内滚动(设小球所经过的弧线很 短).题4-1图解:要使一个系统作谐振动,必须同时满足以下三个条件:一 ,描述系统的各种参量,如质量、转动惯量、摆长……等等在运动中保持为常量;二,系统 是在 自己的稳定平衡位置附近作往复运动;三,在运动中系统只受到内部的线性回复力的作用. 或者说,若一个系统的运动微分方程能用0d d 222=+ξωξt描述时,其所作的运动就是谐振动. (1)拍皮球时球的运动不是谐振动.第一,球的运动轨道中并不存在一个稳定的平衡位置; 第二,球在运动中所受的三个力:重力,地面给予的弹力,击球者给予的拍击力,都不是线 性回复力.(2)小球在题4-1图所示的情况中所作的小弧度的运动,是谐振动.显然,小球在运动过程中 ,各种参量均为常量;该系统(指小球凹槽、地球系统)的稳定平衡位置即凹槽最低点,即系统势能最小值位置点O ;而小球在运动中的回复力为θsin mg -,如题4-1图(b)所示.题中所述,S ∆<<R ,故RS∆=θ→0,所以回复力为θmg -.式中负号,表示回复力的方向始终与角位移的方向相反.即小球在O 点附近的往复运动中所受回复力为线性的.若以小球为对象,则小球在以O '为圆心的竖直平面内作圆周运动,由牛顿第二定律,在凹槽切线方向上有θθmg tmR -=22d d令Rg=2ω,则有 0d d 222=+ωθt4-2 劲度系数为1k 和2k 的两根弹簧,与质量为m 的小球按题4-2图所示的两种方式连 接,试证明它们的振动均为谐振动,并分别求出它们的振动周期.题4-2图解:(1)图(a)中为串联弹簧,对于轻弹簧在任一时刻应有21F F F ==,设串联弹簧的等效倔强系数为串K 等效位移为x ,则有111x k F x k F -=-=串222x k F -=又有 21x x x +=2211k F k F k Fx +==串 所以串联弹簧的等效倔强系数为2121k k k k k +=串即小球与串联弹簧构成了一个等效倔强系数为)/(2121k k k k k +=的弹簧振子系统,故小球作谐振动.其振动周期为2121)(222k k k k m k mT +===ππωπ串 (2)图(b)中可等效为并联弹簧,同上理,应有21F F F ==,即21x x x ==,设并联弹簧的倔强系数为并k ,则有2211x k x k x k +=并故 21k k k +=并 同上理,其振动周期为212k k mT +='π4-3 如题4-3图所示,物体的质量为m ,放在光滑斜面上,斜面与水平面的夹角为θ,弹簧的倔强系数为k ,滑轮的转动惯量为I ,半径为R .先把物体托住,使弹簧维持原长,然 后由静止释放,试证明物体作简谐振动,并求振动周期.题4-3图解:分别以物体m 和滑轮为对象,其受力如题4-3图(b)所示,以重物在斜面上静平衡时位置为坐标原点,沿斜面向下为x 轴正向,则当重物偏离原点的坐标为x 时,有221d d sin t xm T mg =-θ ①βI R T R T =-21 ②βR t x=22d d )(02x x k T += ③式中k mg x /sin 0θ=,为静平衡时弹簧之伸长量,联立以上三式,有kxR txR I mR -=+22d d )(令 ImR kR +=222ω 则有0d d 222=+x txω 故知该系统是作简谐振动,其振动周期为)/2(22222K R I m kRI mR T +=+==ππωπ4-4 质量为kg 10103-⨯的小球与轻弹簧组成的系统,按20.1cos(8)(SI)3x t ππ=+的规律作谐振动,求:(1)振动的周期、振幅和初位相及速度与加速度的最大值;(2)最大的回复力、振动能量、平均动能和平均势能,在哪些位置上动能与势能相等? (3)s 52=t 与s 11=t 两个时刻的位相差;解:(1)设谐振动的标准方程为)cos(0φω+=t A x ,则知:3/2,s 412,8,m 1.00πφωππω===∴==T A 又 πω8.0==A v m 1s m -⋅ 51.2=1s m -⋅2.632==A a m ω2s m -⋅(2) N 63.0==m m a FJ 1016.32122-⨯==m mv E J 1058.1212-⨯===E E E k p当p k E E =时,有p E E 2=, 即)21(212122kA kx ⋅= ∴ m 20222±=±=A x (3) ππωφ32)15(8)(12=-=-=∆t t4-5 一个沿x 轴作简谐振动的弹簧振子,振幅为A ,周期为T ,其振动方程用余弦函数表示.如果0=t 时质点的状态分别是:(1)A x -=0;(2)过平衡位置向正向运动; (3)过2Ax =处向负向运动; (4)过2A x -=处向正向运动.试求出相应的初位相,并写出振动方程.解:因为 ⎩⎨⎧-==000sin cos φωφA v A x将以上初值条件代入上式,使两式同时成立之值即为该条件下的初位相.故有)2cos(1πππφ+==t T A x)232cos(232πππφ+==t T A x)32cos(33πππφ+==t T A x)452cos(454πππφ+==t T A x4-6 一质量为kg 10103-⨯的物体作谐振动,振幅为cm 24,周期为s 0.4,当0=t 时位移为cm 24+.求:(1)s 5.0=t 时,物体所在的位置及此时所受力的大小和方向;(2)由起始位置运动到cm 12=x 处所需的最短时间; (3)在cm 12=x 处物体的总能量.解:由题已知 s 0.4,m 10242=⨯=-T A ∴1s rad 5.02-⋅==ππωT又,0=t 时,0,00=∴+=φA x 故振动方程为m )5.0cos(10242t x π-⨯=(1)将s 5.0=t 代入得0.17m m )5.0cos(102425.0=⨯=-t x πN102.417.0)2(10103232--⨯-=⨯⨯⨯-=-=-=πωxm ma F方向指向坐标原点,即沿x 轴负向. (2)由题知,0=t 时,00=φ,t t =时 3,0,20πφ=<+=t v A x 故且 ∴ s 322/3==∆=ππωφt(3)由于谐振动中能量守恒,故在任一位置处或任一时刻的系统的总能量均为J101.7)24.0()2(10102121214223222--⨯=⨯⨯⨯===πωA m kA E 4-7 有一轻弹簧,下面悬挂质量为g 0.1的物体时,伸长为cm 9.4.用这个弹簧和一个质量为g 0.8的小球构成弹簧振子,将小球由平衡位置向下拉开cm 0.1后 ,给予向上的初速度10s cm 0.5-⋅=v ,求振动周期和振动表达式.解:由题知12311m N 2.0109.48.9100.1---⋅=⨯⨯⨯==x g m k而0=t 时,-12020s m 100.5m,100.1⋅⨯=⨯-=--v x ( 设向上为正)又 s 26.12,51082.03===⨯==-ωπωT m k 即 m102)5100.5()100.1()(22222220---⨯=⨯+⨯=+=∴ωv x A45,15100.1100.5tan 022000πφωφ==⨯⨯⨯=-=--即x v ∴ m )455cos(1022π+⨯=-t x4-8 图为两个谐振动的t x -曲线,试分别写出其谐振动方程.题4-8图解:由题4-8图(a),∵0=t 时,s 2,cm 10,,23,0,0000===∴>=T A v x 又πφ 即1s rad 2-⋅==ππωT故 m )23cos(1.0ππ+=t x a 由题4-8图(b)∵0=t 时,35,0,2000πφ=∴>=v A x 01=t 时,22,0,0111ππφ+=∴<=v x又 ππωφ253511=+⨯= ∴πω65=故 m t x b )3565cos(1.0ππ+= 4-9 一轻弹簧的倔强系数为k ,其下端悬有一质量为M 的盘子.现有一质量为m 的物体从离盘底h 高度处自由下落到盘中并和盘子粘在一起,于是盘子开始振动.(1)此时的振动周期与空盘子作振动时的周期有何不同? (2)此时的振动振幅多大?(3)取平衡位置为原点,位移以向下为正,并以弹簧开始振动时作为计时起点,求初位相并写出物体与盘子的振动方程.解:(1)空盘的振动周期为k M π2,落下重物后振动周期为km M +π2,即增大. (2)按(3)所设坐标原点及计时起点,0=t 时,则kmgx -=0.碰撞时,以M m ,为一系统动量守恒,即0)(2v M m gh m +=则有 Mm ghm v +=20于是gM m khk mg M m gh m k mg v x A )(21))(2()()(22222++=++=+=ω(3)gm M khx v )(2tan 000+=-=ωφ (第三象限),所以振动方程为 ⎥⎦⎤⎢⎣⎡+++++=g m M kh t M m k gM m khk mg x )(2arctan cos )(214-10 有一单摆,摆长m 0.1=l ,摆球质量kg 10103-⨯=m ,当摆球处在平衡位置时,若给小球一水平向右的冲量14s m kg 100.1--⋅⋅⨯=∆t F ,取打击时刻为计时起点)0(=t ,求振动的初位相和角振幅,并写出小球的振动方程.解:由动量定理,有0-=∆⋅mv t F∴ 1-34s m 01.0100.1100.1⋅=⨯⨯=∆⋅=--m t F v按题设计时起点,并设向右为x 轴正向,则知0=t 时,100s m 01.0,0-⋅==v x >0∴ 2/30πφ=又 1s rad 13.30.18.9-⋅===l g ω∴m 102.313.301.0)(302020-⨯===+=ωωv v x A 故其角振幅rad 102.33-⨯==ΘlA小球的振动方程为rad )2313.3cos(102.33πθ+⨯=-t4-11 有两个同方向、同频率的简谐振动,其合成振动的振幅为m 20.0,位相与第一振动的位相差为6π,已知第一振动的振幅为m 173.0,求第二个振动的振幅以及第一、第二两振动的位相差.题4-11图解:由题意可做出旋转矢量图如下. 由图知01.02/32.0173.02)2.0()173.0(30cos 222122122=⨯⨯⨯-+=︒-+=A A A A A ∴ m 1.02=A 设角θ为O AA 1,则θcos 22122212A A A A A -+=即 01.0173.02)02.0()1.0()173.0(2cos 2222122221=⨯⨯-+=-+=A A A A A θ 即2πθ=,这说明,1A 与2A 间夹角为2π,即二振动的位相差为2π. 4-12 试用最简单的方法求出下列两组谐振动合成后所得合振动的振幅:(1) ⎪⎩⎪⎨⎧+=+=cm )373cos(5cm )33cos(521ππt x t x (2)⎪⎩⎪⎨⎧+=+=cm)343cos(5cm )33cos(521ππt x t x 解: (1)∵ ,233712πππφφφ=-=-=∆∴合振幅cm1021=+=AAA(2)∵,334πππφ=-=∆∴合振幅0=A4-13 一质点同时参与两个在同一直线上的简谐振动,振动方程为⎪⎩⎪⎨⎧-=+=m)652cos(3.0m)62cos(4.021ππtxtx试分别用旋转矢量法和振动合成法求合振动的振动幅和初相,并写出谐振方程。
大学物理机械振动习题附答案要点
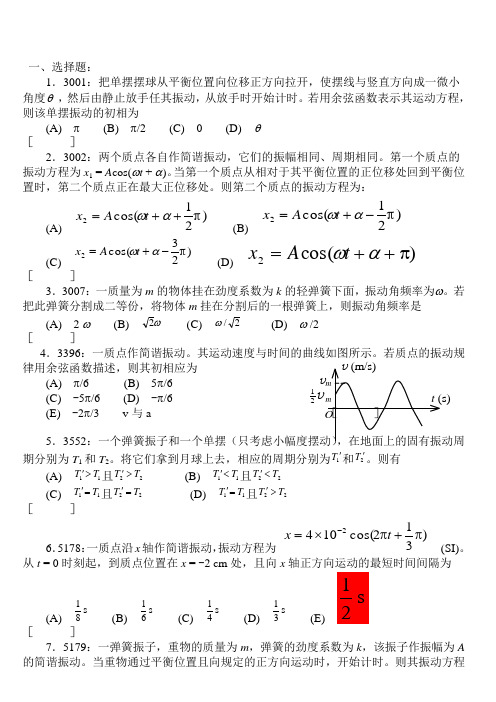
一、选择题:1.3001:把单摆摆球从平衡位置向位移正方向拉开,使摆线与竖直方向成一微小角度θ ,然后由静止放手任其振动,从放手时开始计时。
若用余弦函数表示其运动方程,则该单摆振动的初相为(A) π (B) π/2 (C) 0 (D) θ [ ]2.3002:两个质点各自作简谐振动,它们的振幅相同、周期相同。
第一个质点的振动方程为x 1 = A cos(ωt + α)。
当第一个质点从相对于其平衡位置的正位移处回到平衡位置时,第二个质点正在最大正位移处。
则第二个质点的振动方程为:(A))π21cos(2++=αωt A x (B) )π21cos(2-+=αωt A x (C))π23cos(2-+=αωt A x (D) )cos(2π++=αωt A x [ ]3.3007:一质量为m 的物体挂在劲度系数为k 的轻弹簧下面,振动角频率为ω。
若把此弹簧分割成二等份,将物体m 挂在分割后的一根弹簧上,则振动角频率是(A) 2 ω (B) ω2 (C) 2/ω (D) ω /2 [ ]4.3396:一质点作简谐振动。
其运动速度与时间的曲线如图所示。
若质点的振动规律用余弦函数描述,则其初相应为 (A) π/6 (B) 5π/6 (C) -5π/6 (D) -π/6 (E) -2π/3 v 与a5.3552期分别为T 1和T 2。
将它们拿到月球上去,相应的周期分别为1T '和2T '。
则有(A) 11T T >'且22T T >' (B) 11T T <'且22T T <'(C) 11T T ='且22T T =' (D) 11T T ='且22T T >'[ ] 6.5178:一质点沿x 轴作简谐振动,振动方程为)312cos(1042π+π⨯=-t x (SI)。
从t = 0时刻起,到质点位置在x = -2 cm 处,且向x 轴正方向运动的最短时间间隔为(A) s 81 (B) s 61 (C) s 41 (D) s 31 (E)[ ]7.5179:一弹簧振子,重物的质量为m ,弹簧的劲度系数为k ,该振子作振幅为A 的简谐振动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
13 机械振动解答13-1 有一弹簧振子,振幅A=2.0×10-2m ,周期T=1.0s ,初相ϕ=3π/4。
试写出它的运动方程,并做出x--t 图、v--t 图和a--t 图。
13-1分析 弹簧振子的振动是简谐运动。
振幅A 、初相ϕ、角频率ω是简谐运动方程()ϕω+=t A x cos 的三个特征量。
求运动方程就要设法确定这三个物理量。
题中除A 、ϕ已知外,ω可通过关系式Tπω2=确定。
振子运动的速度和加速度的计算仍与质点运动学中的计算方法相同。
解 因Tπω2=,则运动方程()⎪⎭⎫⎝⎛+=+=ϕπϕωt T t A t A x 2cos cos根据题中给出的数据得]75.0)2cos[()100.2(12ππ+⨯=--t s m x振子的速度和加速度分别为 ]75.0)2sin[()104(/112πππ+⋅⨯-==---t s s m dt dx vπππ75.0)2cos[()108(/112222+⋅⨯-==---t s s m dt x d ax-t 、v-t 及a-t 图如图13-l 所示13-2 若简谐运动方程为⎥⎦⎤⎢⎣⎡+=-4)20(cos )01.0(1ππt s m x ,求:(1)振幅、频率、角频率、周期和初相;(2)t=2s 时的位移、速度和加速度。
13-2分析 可采用比较法求解。
将已知的简谐运动方程与简谐运动方程的一般形式()ϕω+=t A x cos 作比较,即可求得各特征量。
运用与上题相同的处理方法,写出位移、速度、加速度的表达式,代入t 值后,即可求得结果。
解 (l )将]25.0)20cos[()10.0(1ππ+=-t s m x 与()ϕω+=t A x cos 比较后可得:振幅A= 0.10 m ,角频率120-=s πω,初相πϕ25.0=,则周期 s T 1.0/2==ωπ,频率Hz T 10/1==ν。
(2)t= 2s 时的位移、速度、加速度分别为m m x 21007.7)25.040cos()10.0(-⨯=+=ππ )25.040sin()2(/1πππ+⋅-==-s m dt dx v)25.040cos()40(/2222πππ+⋅-==-s m dt x d a13-3 设地球是一个半径为R 的均匀球体,密度ρ5.5×103kg •m -3。
现假定沿直径凿一条隧道。
若有一质量为m 的质点在此隧道内做无摩擦运动。
(1)证明此质点的运动是简谐振动;(2)计算其周期。
13-3分析 证明方法与上题相似。
分析质点在隧道内运动时的受力特征即可。
证(l )取图13-3所示坐标。
当质量为m 的质点位于x 处时,它受地球的引力为2x mm GF x -= 式中G 为引力常量,m x 是以x 为半径的球体质量,即3/43x m x πρ=。
令3/4Gm k πρ=,则质点受力 kx Gmx F -=-=3/4πρ 因此,质点作简谐运动。
(2)质点振动的周期为sG k m T 31007.5/3/2⨯===ρππ13-4 如图所示,两个轻弹簧的劲度系数分别为k 1和k 2,物体在光滑斜面上振动。
(1)证明其运动仍是简谐振动;(2)求系统的振动频率。
13-4分析 从上两题的求解知道,要证明一个系统作简谐运动,首先要分析受力情况,然后看是否满足简谐运动的受力特征(或简谐运动微分方程)。
为此,建立如图13-4(b )所示的坐标。
设系统平衡时物体所在位置为坐标原点O ,Ox 轴正向沿斜面向下,由受力分析可知,沿Ox 轴,物体受弹性力及重力分力的作用,其中弹性力是变力。
利用串联时各弹簧受力相等,分析物体在任一位置时受力与位移的关系,即可证得物体作简谐运动,并可求出频率ν。
证 设物体平衡时两弹簧伸长分别为x 1、x 2,则由物体受力平衡,有2211sin x k x k mg ==θ按图(b )所取坐标,物体沿x 轴移动位移x 时,两弹簧又分别被拉伸'1x 和'2x ,即''21x x x +=。
则物体受力为 )'(sin )'(sin 111222x x k mg x x k mg F +-=+-=θθ 将式(1)代人式(2)得''2211x k x k F -=-=由式(3)得2211/'/'k F x k F x -=-=、,而''21x x x +=,则得到kx x k k k k F -=+-=)/(2121式中)/(2121k k k k k +=为常数,则物体作简谐运动,振动频率m k k k k m k /)/(21/212/2121+===πππϖν讨论(1)由本题的求证可知,斜面倾角θ对弹簧是否作简谐运动以及振动的频率均不产生影响。
事实上,无论弹簧水平放置、斜置还是竖直悬挂,物体均作简谐运动。
而且可以证明它们的频率相同,均由弹簧振子的固有性质决定,这就是称为固有频率的原因。
(2)如果振动系统如图13-4(c )(弹簧并联)或如图13-4(d )所示,也可通过物体在某一位置的受力分析得出其作简谐运动,且振动频率均为m k k /)(2121+=πν读者可以一试。
通过这些例子可以知道,证明物体是否作简谐运动的思路是相同的13-5 为了测得一物体得质量m ,将其挂在一弹簧上让其自由振动,测得振动频率Hz 0.11=ν。
而将另一质量kg m 5.0'=的物体单独挂在该弹簧上时,测得振动频率Hz 0.22=ν。
设振动均在弹簧的弹性限度内进行,求被测物体的质量。
13-5分析 物体挂在弹簧上组成弹簧振子系统,其振动频率m k /21πν=,即m /1∝ν。
采用比较频率ν的方法可求出未知物体的质量。
解 由分析可知,m /1∝ν,则有m m /'/21=νν。
根据题中绘出的数据可得物体的质量为kg m m 0.2)/('212==νν13-6 在如图所示的装置中,一劲度系数为k 的弹簧,一端固定在墙上,另一端连接一质量为m 1的物体A ,置于光滑水平桌面上。
现通过一质量为m 、半径为R 的定滑轮B (可视为匀质圆盘)用细绳连接另一质量为m 2的物体C ,设细绳不可伸长,且与滑轮间无相对滑动,求系统的振动角频率。
13-6分析 这是一个由弹簧、物体A 、C 和滑轮B 组成的简谐运动系统。
求解系统的振动频率可采用两种方法。
(1)从受力分析着手。
如图13-6(b )所示,设系统处于平衡状态时,与物体A 相连的弹簧一端所在位置为坐标原点O ,此时弹簧已伸长x 0,且g m kx 20=。
当弹簧沿Ox 轴正向从原点O 伸长x 时,分析物体A 、C 及滑轮B 的受力情况,并分别列出它们的动力学方程,可解得系统作简谐运动的微分方程。
(2)从系统机械能守恒着手。
列出系统机械能守恒方程,然后求得系统作简谐运动的微分方程。
解1 在图13-6(b )的状态下,各物体受力如图13-6(c )所示。
其中i x x k F )(0+-=。
考虑到绳子不可伸长,对物体A 、B 、C 分别列方程,有22101)(dt xd m x x k F T =+-(1)22222dtxd m F g m T =-(2)221221)(dt xd mR J R F F T T ==-α(3) g m kx 20=(4)方程(3)中用到了R a mR J F F F F T T T T /2/''22211====α、及、、。
联立式(l )-式(4)可得02/2122=+++x m m m kdt x d 则系统振动的角频率为)2//(21m m m k ++=ϖ解2 取整个振动装置和地球为研究系统,因没有外力和非保守内力作功,系统机械能守恒。
设物体平衡时为初始状态,物体向右偏移距离X (此时速度为对v 、加速度为a )为末状态,则由机械能守恒定律,有2022221220)(2121212121x x k J v m v m gx m kx +++++-=ϖ 在列出上述方程时应注意势能(重力势能和弹性势能)零点的选取。
为运算方便,选初始状态下物体C 所在位置为重力势能零点;弹簧原长时为弹性势能的零点。
将上述方程对时间求导得20212)(0x x k dtdvJ dt dv v m dt dv vm gv m +++++-=ϖ 将02222//2/kx g m dt x d dt dv v R mR J ====和、、ϖ代人上式,可得02/2122=+++x m m m kdt x d 式(6)与式(5)相同,表明两种解法结果一致。
17-7 一放置在水平桌面上的弹簧振子,振幅A=2.0×10-2m,周期T=0.50s 。
当t=0时,(1)物体在正方向端点;(2)物体在平衡位置向负方向运动;(3)物体在..x=1.0×10-2m 处,向负方向运动;(4)物体在..x= -1.0×10-2m 处,向正方向运动。
求以上各种情况的运动方程。
13-7分析 在振幅A 和周期T 已知的条件下,确定初相中是求解简谐运动方程的关键。
初相的确定通常有两种方法。
(1)解析法:由振动方程出发,根据初始条件,即t= 0时, x= x o 和0v v =来确定ϕ值。
(2)旋转矢量法:如图 13-7(a )所示,将质点P 在Ox 轴上振动的初始位置x 0和速度v 0的方向与旋转矢量图相对应来确定ϕ。
旋转矢量法比较直观、方便,在分析中常采用。
解 由题给条件知 m A 2100.2-⨯=,14/2-==s T ππϖ,而初相ϕ可采用分析中的两种不同方法来求。
解析法:根据简谐运动方程()ϕω+=t A x cos ,当 t =0时有ϕcos 0A x =,ϕϖsin 0A v -=。
当(1);,则时,01cos 110===ϕϕA x (2);,取,因,则时,2020cos 20220πϕπϕϕ=±===πv A x(3);,取,因,则时,3035.0cos 100.1303320πϕπϕϕ=±==⨯=-πv m x (4);,取,因,则时,34035.0cos 100.1404420πϕππϕϕ=±=-=⨯-=-φv m x 旋转矢量法:分别画出四个不同初始状态的旋转关量图,如图13-7(b )所示,它们所对应的初相分别为01=ϕ,2/1πϕ=,3/1πϕ=,3/41πϕ=。
振幅A 、角频率ω、初相ϕ均确定后,则各相应状态下的运动方程为 (1)t s m x )4cos()100.2(12--⨯=π (2)]2)4cos[()100.2(12ππ+⨯=--t s m x (3)]3)4cos[()100.2(12ππ+⨯=--t s m x(4)]34)4cos[()100.2(12ππ+⨯=--t s m x13-8 有一弹簧,当其下端挂一质量为m 的物体时,伸长量为9.8×10-2m 。