台达PLC定位控制参数
台达PLC_实例伺服控制实例参数设置及PLC程序

台达PLC_实例伺服控制实例参数设置及PLC程序一、伺服控制实例参数设置对于伺服控制的实例,需要设置控制器的参数,包括速度、位置、力矩等参数。
在台达PLC中,可以通过MODBUS RTU协议或RS485接口来实现参数的读写。
在控制器参数设置中,一些关键参数是需要特别注意的,包括伺服电机的额定电流、最大速度及加速度、位置锁定误差等。
参数设置的正确性对于伺服控制的精确性和安全性都有非常重要的影响。
伺服电机的参数设置也非常重要。
其中最为重要的参数是转矩常数、每转编码器数等。
这些参数的正确设置可以保证伺服电机的控制精度。
另外,伺服电机的额定电流和峰值电流也需要设置。
这些参数对于电机的工作效率、性能和寿命都有极大的影响。
为了更加深入地了解伺服控制器参数设置的过程,下面以一台伺服电机控制器为例进行具体说明。
首先,需要设置伺服电机的参数,包括转矩常数、每转编码器数、额定电流和峰值电流等。
接着,需要根据机器的实际运行情况,设置伺服电机的最大速度和加速度等参数。
这些参数的设置需要根据机器的实际运动情况和需求进行调整。
最后,需要设置位置锁定误差,以保证伺服电机可以准确地停在目标位置上。
二、PLC程序实例下面以一个伺服控制的PLC程序为例进行说明。
1、程序功能说明本程序的功能是通过PLC对伺服电机进行控制,保证电机可以精确地运动到目标位置。
具体实现方法是读取编码器的数据,然后与目标位置的数据进行比较,计算出电机需要运动的距离,然后根据伺服控制器的参数进行控制,使得电机能够精确地运动到目标位置。
2、程序流程图下图为程序的流程图:3、程序代码以下是本程序的PLC代码:(1)读取编码器数据M0.0 ENM0.1 INCM0.2 CLRM0.3 LDM0.4 ENM0.5 RET(2)计算电机需要运动的距离 C0 K1000D0 0D1 0L1:LDI M0.0R JZ L1CALL L2ADD D1 D2 D1(3)运动控制L2:CALL L3CDIV D13 D15 D0CDIV D14 D15 D1MUL D0 D1 D1MUL D2 D3 D3ADD D1 D3 D2LDI D11R JGE L4NEG D5 D5CPR C4 D0 D7R JN L6M OV 0 PORT2M OV 1 M0.1LDI C1M OV 1 K1M OVB 2 K2RETLDI C3M MOV 1 K250RET程序中通过伺服控制器的参数来实现电机的准确控制,保证最终能够达到目标位置。
台达PLC定位控制参数
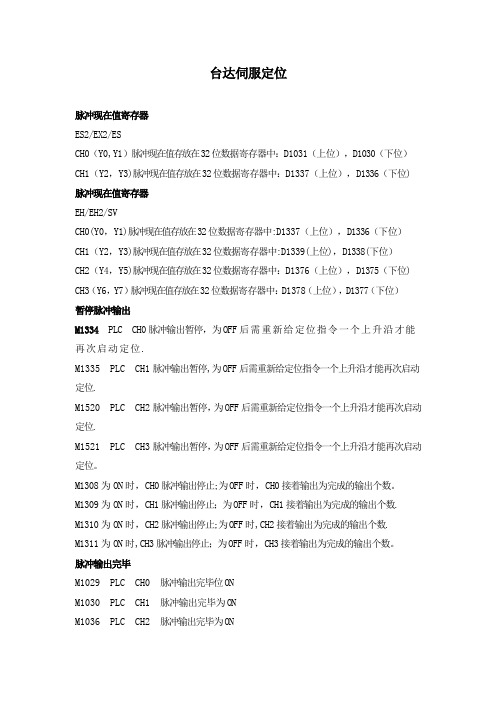
台达P L C定位控制参数Document number【AA80KGB-AA98YT-AAT8CB-2A6UT-A18GG】台达伺服定位脉冲现在值寄存器ES2/EX2/ES?CH0(Y0,Y1)脉冲现在值存放在32位数据寄存器中:D1031(上位),D1030(下位)?CH1(Y2,Y3)脉冲现在值存放在32位数据寄存器中:D1337(上位),D1336(下位)?脉冲现在值寄存器?EH/EH2/SV?CH0(Y0,Y1)脉冲现在值存放在32位数据寄存器中:D1337(上位),D1336(下位)CH1(Y2,Y3)脉冲现在值存放在32位数据寄存器中:D1339(上位),D1338(下位)?CH2(Y4,Y5)脉冲现在值存放在32位数据寄存器中:D1376(上位),D1375(下位)?CH3(Y6,Y7)脉冲现在值存放在32位数据寄存器中:D1378(上位),D1377(下位)??暂停脉冲输出?M1334?PLC?CH0脉冲输出暂停,为OFF后需重新给定位指令一个上升沿才能再次启动定位。
M1335?PLC?CH1脉冲输出暂停,为OFF后需重新给定位指令一个上升沿才能再次启动定位。
?M1520?PLC?CH2脉冲输出暂停,为OFF后需重新给定位指令一个上升沿才能再次启动定位。
M1521?PLC?CH3脉冲输出暂停,为OFF后需重新给定位指令一个上升沿才能再次启动定位。
?M1308为ON时,CH0脉冲输出停止;为OFF时,CH0接着输出为完成的输出个数。
M1309为ON时,CH1脉冲输出停止;为OFF时,CH1接着输出为完成的输出个数。
? M1310为ON时,CH2脉冲输出停止;为OFF时,CH2接着输出为完成的输出个数。
?M1311为ON时,CH3脉冲输出停止;为OFF时,CH3接着输出为完成的输出个数。
? 脉冲输出完毕?M1029?PLC?CH0?脉冲输出完毕位ON?M1030?PLC?CH1?脉冲输出完毕为ON?M1036?PLC?CH2?脉冲输出完毕为ON?M1037?PLC?CH3?脉冲输出完毕为ON??原点回归清除标志位M1346,当M1346为O N时原点回归完成后PLC可输出对伺服驱动器的清除信号?EH2/SV?CH0(Y0,Y1)清除装置Y4?CH1(Y2,Y3)清除装置Y5?EH3/SV2?CH0(Y0,Y1)清除装置Y10?CH1(Y2,Y3)清除装置Y11?CH2(Y4,Y5)清除装置Y12?CH3(Y6,Y7)清除装置Y13?脉冲输出中标志位?EH2/SV?M1336?CH0(Y0,Y1)脉冲输出中为ON,脉冲结束输出为OFF?M1337?CH1(Y2,Y3)?脉冲输出中为O N,脉冲结束输出为OFF?M1522?CH2(Y4,Y5)?脉冲输出中为O N,脉冲结束输出为OFF?M1523?CH3(Y6,Y7)?脉冲输出中为O N,脉冲结束输出为OFF?脉冲输出方向信号EH2/SV/EH3/SV2?M1305??当CH0的输出脉冲数为负值时M1305为O N,正值时位OFF?M1306? 当CH1的输出脉冲数为负值时M1306为O N,正值时为OFF?M1532??当CH2的输出脉冲数为负值时M1532为O N,正值时位OFF?M1533??当CH3的输出脉冲数为负值时M1533为O N,正值时位OFF??加减速时间设置?D1343?CH0加减速时间设置? D1353?CH1加减速时间设置? D1381?CH2加减速时间设置D1382?CH3加减速时间设置。
台达6轴高速定位型PLC-10PM使用介绍1
台达6轴高速定位型PLC-10PM使用介绍1 台达6轴高速定位型PLC-10PM基本使用介绍摘要:本文简述台达DVP10PM运动控制型PLC的功能,及六轴高速计数及高速定位的使用方法关键词:PLC 6轴定位控制逻辑控制1 引言随着自动化设备对控制的高精度、高响应性需求的不断增加,自动化控制技术不断提高,精确的高速定位控制得到广泛应用,PLC这一工业控制产品也从早期的逻辑控制领域不断扩展到运动控制领域,实现了以往PLC无法完成的运动控制功能。
在NC定位控制中大多数采用我们熟悉的数控系统或者是计算机运动板卡来完成,虽然作为专门的产品能够实现复杂的运动轨迹控制,但同时要完成一些逻辑动作的控制就不如PLC灵活方便。
台达DVP10PM系列PLC是具有高速定位、六轴直线插补功能的可编程控制器,结合了PLC逻辑动作控制和数控系统运动控制的各自优点,在功能上满足六轴单动六轴之间任意直线插补的高速定位需求。
2 主要功能介绍。
台达10PM, 具备6组硬件高速计数器/高速定时器、6轴直线补间、电子齿轮动态追踪之NC定位脉波输出及高速中断与捕捉式输入等高阶功能,速度更快,功能及可靠度更佳,为同级PLC中功能最强,最具竞争优势者。
同时在软件上10PM PLC指令超过300种以上,并且指令速度最快是同类PLC的10并可自定义采用最人性化,中型PLC才具有的功能块编程方式。
如下图自定义输入/多输出指令格式。
一个指令即可达成大部份它牌PLC数个指令才能做到的功能,使程序大为精简同时运算结果可直接由方块右侧之输出取得。
用户不需强记住各个轴的特M与特D.在程序可读性方面,每个应用指令之输出或输入端均有功能助忆简码说明,操作数字段则直接标明其属性简称并可于其正下方直接显示其状态或内容值,可免除它牌PLC无标示需死记之麻烦,程序之可读性最高,效率最佳。
在高阶应用方面,如网络LNK、PID控制、NC定位等,则有专用之便利指令与之对应,大幅降低使用障碍。
台达PLC控制伺服说明

14应用指令简单定位设计范例14.1 台达ASDA伺服简单定位演示系统X1伺服电机Y0脉冲输出Y1正转反转/Y4脉冲清除DOP-A人机ASDA伺服驱动器WPLSoft【控制要求】z由台达PLC和台达伺服组成一个简单的定位控制演示系统。
通过PLC发送脉冲控制伺服,实现原点回归、相对定位和绝对定位功能的演示。
z监控画面:原点回归、相对定位、绝对定位。
【元件说明】PLC软元件说明M0 原点回归开关M1 正转10圈开关M2 反转10圈开关M3 坐标400000开关M4 坐标-50000开关M10 伺服启动开关M11 伺服异常复位开关M12 暂停输出开关(PLC脉冲暂停输出)M13 伺服紧急停止开关X0 正转极限传感器X1 反转极限传感器X2 DOG(近点)信号传感器X3 来自伺服的启动准备完毕信号(对应M20)X4 来自伺服的零速度检出信号(对应M21)X5 来自伺服的原点回归完成信号(对应M22)X6 来自伺服的目标位置到达信号(对应M23)X7 来自伺服的异常报警信号(对应M24)Y0 脉冲信号输出14应用指令简单定位设计范例Y1 伺服电机旋转方向信号输出Y4 清除伺服脉冲计数寄存器信号Y6 伺服启动信号Y7 伺服异常复位信号Y10 伺服电机正方向运转禁止信号Y11 伺服电机反方向运转禁止信号Y12 伺服紧急停止信号M20 伺服启动完毕状态M21 伺服零速度状态M22 伺服原点回归完成状态M23 伺服目标位置到达状态M24 伺服异常报警状态【ASD-A伺服驱动器参数必要设置】参数设置值说明P0-02 2伺服面板显示脉冲指令脉冲计数P1-00 2外部脉冲输入形式设置为脉冲+方向P1-01 0位置控制模式(命令由外部端子输入)P2-10 101当DI1=On时,伺服启动P2-11 104当DI2=On时,清除脉冲计数寄存器P2-12 102当DI3=On时,对伺服进行异常重置P2-13 122当DI4=On时,禁止伺服电机正方向运转P2-14 123当DI5=On时,禁止伺服电机反方向运转P2-15 121当DI6=On时,伺服电机紧急停止P2-16 0无功能P2-17 0无功能P2-18 101当伺服启动准备完毕,DO1=OnP2-19 103当伺服电机转速为零时,DO2=OnP2-20 109当伺服完成原点回归后,DO3=OnP2-21 105当伺服到达目标位置后,DO4=OnP2-22 107当伺服报警时,DO5=OnÚ当出现伺服因参数设置错乱而导致不能正常运行时,可先设置P2-08=10(回归出厂值),重新上电后再按照上表进行参数设置。
台达PLC定位控制参数
台达伺服定位脉冲现在值寄存器ES2/EX2/ESCH0(Y0,Y1)脉冲现在值存放在32位数据寄存器中:D1031(上位),D1030(下位)CH1(Y2,Y3)脉冲现在值存放在32位数据寄存器中:D1337(上位),D1336(下位) 脉冲现在值寄存器EH/EH2/SVCH0(Y0,Y1)脉冲现在值存放在32位数据寄存器中:D1337(上位),D1336(下位)CH1(Y2,Y3)脉冲现在值存放在32位数据寄存器中:D1339(上位),D1338(下位)CH2(Y4,Y5)脉冲现在值存放在32位数据寄存器中:D1376(上位),D1375(下位) CH3(Y6,Y7)脉冲现在值存放在32位数据寄存器中:D1378(上位),D1377(下位)暂停脉冲输出M1334 PLC CH0脉冲输出暂停,为OFF后需重新给定位指令一个上升沿才能再次启动定位.M1335 PLC CH1脉冲输出暂停,为OFF后需重新给定位指令一个上升沿才能再次启动定位.M1520 PLC CH2脉冲输出暂停,为OFF后需重新给定位指令一个上升沿才能再次启动定位.M1521 PLC CH3脉冲输出暂停,为OFF后需重新给定位指令一个上升沿才能再次启动定位。
M1308为ON时,CH0脉冲输出停止;为OFF时,CH0接着输出为完成的输出个数。
M1309为ON时,CH1脉冲输出停止;为OFF时,CH1接着输出为完成的输出个数.M1310为ON时,CH2脉冲输出停止;为OFF时,CH2接着输出为完成的输出个数.M1311为ON时,CH3脉冲输出停止;为OFF时,CH3接着输出为完成的输出个数。
脉冲输出完毕M1029 PLC CH0 脉冲输出完毕位ONM1030 PLC CH1 脉冲输出完毕为ONM1036 PLC CH2 脉冲输出完毕为ONM1037 PLC CH3 脉冲输出完毕为ON原点回归清除标志位M1346,当M1346为O N时原点回归完成后PLC可输出对伺服驱动器的清除信号EH2/SVCH0(Y0,Y1)清除装置Y4CH1(Y2,Y3)清除装置Y5EH3/SV2CH0(Y0,Y1)清除装置Y10CH1(Y2,Y3)清除装置Y11CH2(Y4,Y5)清除装置Y12CH3(Y6,Y7)清除装置Y13脉冲输出中标志位EH2/SVM1336 CH0(Y0,Y1)脉冲输出中为ON,脉冲结束输出为OFFM1337 CH1(Y2,Y3) 脉冲输出中为O N,脉冲结束输出为OFFM1522 CH2(Y4,Y5) 脉冲输出中为O N,脉冲结束输出为OFFM1523 CH3(Y6,Y7)脉冲输出中为O N,脉冲结束输出为OFF脉冲输出方向信号EH2/SV/EH3/SV2M1305 当CH0的输出脉冲数为负值时M1305为O N,正值时位OFFM1306 当CH1的输出脉冲数为负值时M1306为O N,正值时为OFFM1532 当CH2的输出脉冲数为负值时M1532为O N,正值时位OFFM1533 当CH3的输出脉冲数为负值时M1533为O N,正值时位OFF加减速时间设置D1343 CH0加减速时间设置D1353 CH1加减速时间设置D1381 CH2加减速时间设置D1382 CH3加减速时间设置。
台达PLC台达MS300变频器通用参数设置.
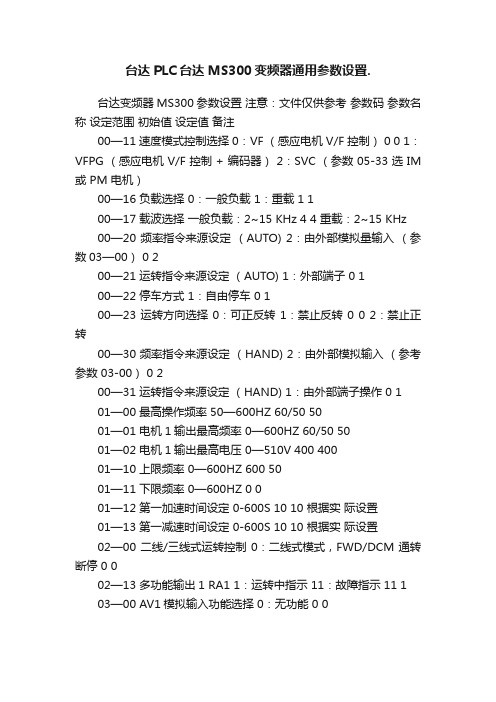
台达PLC台达MS300变频器通用参数设置.台达变频器MS300参数设置注意:文件仅供参考参数码参数名称设定范围初始值设定值备注00—11 速度模式控制选择 0:VF (感应电机 V/F 控制) 0 0 1:VFPG (感应电机 V/F 控制 + 编码器) 2:SVC (参数 05-33 选 IM 或 PM 电机)00—16 负载选择 0:一般负载 1:重载 1 100—17 载波选择一般负载:2~15 KHz 4 4 重载:2~15 KHz00—20 频率指令来源设定(AUTO) 2:由外部模拟量输入(参数03—00) 0 200—21 运转指令来源设定(AUTO) 1:外部端子 0 100—22 停车方式 1:自由停车 0 100—23 运转方向选择 0:可正反转 1:禁止反转 0 0 2:禁止正转00—30 频率指令来源设定(HAND) 2:由外部模拟输入(参考参数 03-00) 0 200—31 运转指令来源设定(HAND) 1:由外部端子操作 0 101—00 最高操作频率 50—600HZ 60/50 5001—01 电机1输出最高频率 0—600HZ 60/50 5001—02 电机1输出最高电压 0—510V 400 40001—10 上限频率 0—600HZ 600 5001—11 下限频率 0—600HZ 0 001—12 第一加速时间设定 0-600S 10 10 根据实际设置01—13 第一减速时间设定 0-600S 10 10 根据实际设置02—00 二线/三线式运转控制 0:二线式模式,FWD/DCM 通转断停 0 002—13 多功能输出1 RA1 1:运转中指示 11:故障指示 11 103—00 AV1模拟输入功能选择 0:无功能 0 0。
台达-PLC-定位指令
S3 近點訊號 Off
7. ZRN(DZRN)指令適用於附絕對位置檢測功能的伺服馬達,如三菱 MR-J2-A 伺 服驅動器。即使電源關閉仍可記錄現在位置。另外由於伺服驅動器的現在位置 可以 DVP-EH2/SV/EH3/SV2/SC PLC API 155 DABSR 指令讀出,因此僅須做 一次原點復歸即可,在電源 Off 後不須另做原點復歸操作。
8. 原歸復歸指令開始執行的條件成立時,CH0(CH1)會讀取 D1343(D1353)設定的 內容值為加減速時間,加速到原點復歸速度後,等待 DOG 原點信號進入便從 原點復歸速度減速到寸動速度,直至 DOG 原點信號 OFF 立即停止輸出脈波。
9. SC 主機本指令可同時編寫多組於使用者程式中,但是每次 PLC 程式執行時只 能啟動一組指令,例如已有指令起動 Y10 這一組輸出時,則其他使用同 Y10 輸 出的指令將不會被執行;所以啟動指令之順序是由先啟動者先執行為原則。
尋找 Z 相功能 (M1578=Off)
Z 相編號
D1312 為 Z 相 計數次數
X1
X5
X11
X15
正、負數分別表示往正、負向尋找 Z 相
位移指定個數 (M1578=On)
D1312 為位移 個數
正、負數分別表示往正、負方向輸出
輸出清除訊號(M1346=On)
Y10
Y11
Y12
Y13
在進行 API 158 DRVI 相對定位或 API 159 DRVA 絕對定位時,PLC 內有自動產生 的 正 轉 / 逆 轉 脈 波 做 增 減 的 現 在 值 暫 存 器 EH2/SV/EH3/SV2 主 機 (Y0 : D1337,D1336 , Y2 : D1339,D1338) 、 SC 主 機 (Y10 : D1348,D1349 , Y11 : D1350,D1351)。因此可隨時掌握機械位置,但由於 PLC 的電源 Off 時資料會消失, 因此執行初次運轉時的原點復歸須輸入機械動作的原點位置資料。
台达PLC通讯控制伺服教程
以下
修改监控时间,延长通讯时间
-
原点回归伺服软件设置:(原点复归模式设置) 1;点击原点复归模式 2;P-04原点复归模式选择X,Y,Z 3;原点复归速度设定,第一段p505速度设置,第二段速度 4;路径形式(选路径10)
-
原点回归伺服软件设置:(路径10设置) 1;点击原点复归模式 2;选择到路径10(路径10设置为回零点进行设置) 3;选TYPE路径型式 4;选位置命令 5;选运行速度 6;p621待机位给定目标位置
-
台达PLC以Canopen控制伺服
在线描硬件,
SDO自动配置
-
SDO配置内容
-
SDO设置;p3-06(伺服DI来源设定3F1F) SDO自动 POD设置; 写; P4-05 (JOG手动控制) RX1400 属性设置为异步255 P4-07 (DI控制外部端子控制P2-10—P2-17设定端子功能) RX1401
-
自动SDO配置:在Index(hex):选择 (P3-06)在数据(hex)输入 (1F3F),点击确认后在显示(3F1F),P3-06用于确定P4-07位功能。
-
PDO配置
-
PDO配置Biblioteka -P4-07位控制定义
-
-
-
-
伺服通过软件设置站号、通信格式、波 特率
-
电子齿轮比的设置
-
伺服软件DI/DO功能选择; A/B为常开、常闭切换。
台达PLC控制伺服ASDA说明
台达ASDA伺服简单定位演示系统【控制要求】1:由台达PLC和台达伺服组成一个简单的定位控制演示系统。
通过PLC发送脉冲控制伺服,实现原点回归、相对定位和绝对定位功能的演示。
2:监控画面:原点回归、相对定位、绝对定位。
附:ASD-A伺服驱动器参数必要设置注意:当出现伺服因参数设置错乱而导致不能正常运行时,可先设置P2-08=10(回归出厂值),重新上电后再按照上表进行参数设置。
附:PLC元件说明附:PLC与伺服驱动器硬件接线图控制程序:程序说明:1:当伺服上电之后,如无警报信号,X3=On,此时,按下伺服启动开关,M10=On,伺服启动。
2:按下原点回归开关时,M0=On,伺服执行原点回归动作,当DOG信号X2由Off→On变化时,伺服以5KHZ的寸动速度回归原点,当DOG信号由On→Off变化时,伺服电机立即停止运转,回归原点完成。
3:按下正转10圈开关,M1=On,伺服电机执行相对定位动作,伺服电机正方向旋转10圈后停止运转。
4:按下正转10圈开关,M2=On,伺服电机执行相对定位动作,伺服电机反方向旋转10圈后停止运转。
5:按下坐标400000开关,M3=On,伺服电机执行绝对定位动作,到达绝对目标位置400,000处后停止。
6:按下坐标-50000开关,M4=On,伺服电机执行绝对定位动作,到达绝对目标位置-50,000处后停止。
7:若工作物碰触到正向极限传感器时,X0=On,Y10=On,伺服电机禁止正转,且伺服异常报警(M24=On)。
8:若工作物碰触到反向极限传感器时,X1=On,Y11=On,伺服电机禁止正转,且伺服异常报警(M24=On)。
9:当出现伺服异常报警后,按下伺服异常复位开关,M11=On,伺服异常报警信息解除,警报解除之后,伺服才能继续执行原点回归和定位的动作。
10:按下PLC脉冲暂停输出开关,M12=On,PLC暂停输出脉冲,脉冲输出个数会保持在寄存器内,当M12=Off时,会在原来输出个数基础上,继续输出未完成的脉冲。
台达PLC控制伺服说明
14应用指令简单定位设计范例14.1 台达ASDA伺服简单定位演示系统X1伺服电机Y0脉冲输出Y1正转反转/Y4脉冲清除DOP-A人机ASDA伺服驱动器WPLSoft【控制要求】z由台达PLC和台达伺服组成一个简单的定位控制演示系统。
通过PLC发送脉冲控制伺服,实现原点回归、相对定位和绝对定位功能的演示。
z监控画面:原点回归、相对定位、绝对定位。
【元件说明】PLC软元件说明M0 原点回归开关M1 正转10圈开关M2 反转10圈开关M3 坐标400000开关M4 坐标-50000开关M10 伺服启动开关M11 伺服异常复位开关M12 暂停输出开关(PLC脉冲暂停输出)M13 伺服紧急停止开关X0 正转极限传感器X1 反转极限传感器X2 DOG(近点)信号传感器X3 来自伺服的启动准备完毕信号(对应M20)X4 来自伺服的零速度检出信号(对应M21)X5 来自伺服的原点回归完成信号(对应M22)X6 来自伺服的目标位置到达信号(对应M23)X7 来自伺服的异常报警信号(对应M24)Y0 脉冲信号输出14应用指令简单定位设计范例Y1 伺服电机旋转方向信号输出Y4 清除伺服脉冲计数寄存器信号Y6 伺服启动信号Y7 伺服异常复位信号Y10 伺服电机正方向运转禁止信号Y11 伺服电机反方向运转禁止信号Y12 伺服紧急停止信号M20 伺服启动完毕状态M21 伺服零速度状态M22 伺服原点回归完成状态M23 伺服目标位置到达状态M24 伺服异常报警状态【ASD-A伺服驱动器参数必要设置】参数设置值说明P0-02 2伺服面板显示脉冲指令脉冲计数P1-00 2外部脉冲输入形式设置为脉冲+方向P1-01 0位置控制模式(命令由外部端子输入)P2-10 101当DI1=On时,伺服启动P2-11 104当DI2=On时,清除脉冲计数寄存器P2-12 102当DI3=On时,对伺服进行异常重置P2-13 122当DI4=On时,禁止伺服电机正方向运转P2-14 123当DI5=On时,禁止伺服电机反方向运转P2-15 121当DI6=On时,伺服电机紧急停止P2-16 0无功能P2-17 0无功能P2-18 101当伺服启动准备完毕,DO1=OnP2-19 103当伺服电机转速为零时,DO2=OnP2-20 109当伺服完成原点回归后,DO3=OnP2-21 105当伺服到达目标位置后,DO4=OnP2-22 107当伺服报警时,DO5=OnÚ当出现伺服因参数设置错乱而导致不能正常运行时,可先设置P2-08=10(回归出厂值),重新上电后再按照上表进行参数设置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
台达伺服定位
脉冲现在值寄存器
ES2/EX2/ES?
CH0(Y0,Y1)脉冲现在值存放在32位数据寄存器中:D1031(上位),D1030(下位)? CH1(Y2,Y3)脉冲现在值存放在32位数据寄存器中:D1337(上位),D1336(下位)? 脉冲现在值寄存器?
EH/EH2/SV?
CH0(Y0,Y1)脉冲现在值存放在32位数据寄存器中:D1337(上位),D1336(下位)CH1(Y2,Y3)脉冲现在值存放在32位数据寄存器中:D1339(上位),D1338(下位)? CH2(Y4,Y5)脉冲现在值存放在32位数据寄存器中:D1376(上位),D1375(下位)? CH3(Y6,Y7)脉冲现在值存放在32位数据寄存器中:D1378(上位),D1377(下位)?? 暂停脉冲输出?
M1334?PLC?CH0脉冲输出暂停,为OFF后需重新给定位指令一个上升沿才能再次启动定位。
M1335?PLC?CH1脉冲输出暂停,为OFF后需重新给定位指令一个上升沿才能再次启动定位。
?
M1520?PLC?CH2脉冲输出暂停,为OFF后需重新给定位指令一个上升沿才能再次启动定位。
M1521?PLC?CH3脉冲输出暂停,为OFF后需重新给定位指令一个上升沿才能再次启动定位。
?
M1308为ON时,CH0脉冲输出停止;为OFF时,CH0接着输出为完成的输出个数。
M1309为ON时,CH1脉冲输出停止;为OFF时,CH1接着输出为完成的输出个数。
?
M1310为ON时,CH2脉冲输出停止;为OFF时,CH2接着输出为完成的输出个数。
?
M1311为ON时,CH3脉冲输出停止;为OFF时,CH3接着输出为完成的输出个数。
?
脉冲输出完毕?
M1029?PLC?CH0?脉冲输出完毕位ON?
M1030?PLC?CH1?脉冲输出完毕为ON?
M1036?PLC?CH2?脉冲输出完毕为ON?
M1037?PLC?CH3?脉冲输出完毕为ON??
原点回归清除标志位M1346,当M1346为O N时原点回归完成后PLC可输出对伺服驱动器的清除信号?
EH2/SV?
CH0(Y0,Y1)清除装置Y4?
CH1(Y2,Y3)清除装置Y5?
EH3/SV2?
CH0(Y0,Y1)清除装置Y10?
CH1(Y2,Y3)清除装置Y11?
CH2(Y4,Y5)清除装置Y12?
CH3(Y6,Y7)清除装置Y13?
脉冲输出中标志位?
EH2/SV?
M1336?CH0(Y0,Y1)脉冲输出中为ON,脉冲结束输出为OFF?
M1337?CH1(Y2,Y3)?脉冲输出中为O N,脉冲结束输出为OFF?
M1522?CH2(Y4,Y5)?脉冲输出中为O N,脉冲结束输出为OFF?
M1523?CH3(Y6,Y7)?脉冲输出中为O N,脉冲结束输出为OFF?
脉冲输出方向信号
EH2/SV/EH3/SV2?
M1305??当CH0的输出脉冲数为负值时M1305为O N,正值时位OFF?
M1306? 当CH1的输出脉冲数为负值时M1306为O N,正值时为OFF?
M1532??当CH2的输出脉冲数为负值时M1532为O N,正值时位OFF?
M1533??当CH3的输出脉冲数为负值时M1533为O N,正值时位OFF??
加减速时间设置?
D1343?CH0加减速时间设置?
D1353?CH1加减速时间设置?
D1381?CH2加减速时间设置
D1382?CH3加减速时间设置
?。