车辆主动悬架LQG控制器的设计与仿真分析
车辆主动悬架LQG控制器的设计与仿真分析16
的方法是让白噪声通过一成形滤波器[ 1 ] , 所以前、 后 车轮受到的路面激励为 α x 9 = - 2Π f 0 x 9 + 2Π α x 10 = - 2Π f 0 x 10 + 2Π
G 0 v 0w G 0 v 0w
1
在分析悬架系统的动态特性时, 路面模型的建 立是一个重要部分。 这里, 生成随机路面不平度轮廓
Abstract A 1 2 ca r m odel and a road inp u t m odel w ere estab lished ba sed on the op t im a l con t ro l theo ry w h ich w a s u sed to design a LQ G con t ro ller of au tom ob ile act ive su sp en sion. A system sim u la t ion m odel ba sed on M a t lab Sim u link environm en t w a s bu ilt and u sed fo r sim u la t ion. Fou r p erfo rm 2 ance indexes, body accelera t ion, p itch ang le accelera t ion, su sp en sion dynam ic t ravel and t ire dyn 2 am ic deflect ion, w ere com p a red. T he sim u la t ion resu lt s dem on st ra ted tha t the act ive su sp en sion w ith a LQ G con t ro ller cou ld im p rove au tom ob ile rid ing com fo rt p erfo rm ance eno rm ou sly. Key words V eh icle, A ct ive su sp en sion, LQ G con t ro ller, Sim u la t ion
车辆主动悬架模糊控制器的设计及其仿真分析
( /) 车身加速度
图! 用拟合出的 "#$ 实现控制 [!] 林辉, 王林 " 迭代学习控制理论 [#] " 西北工业大学出版社, !$$% & !’ " [(] 焦李成 " 神经网络系统理论 [ #] " 西安 电子 科 技 大学 出 版 社, !$$’ & !( "
收稿日期: !""! # "$ # !"
! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! !
第 !" 卷
5 其中: 0 %( $ / ", $ / (, $" , $( , $, )
系统模型的建立
车辆悬架系统模型的建立 车辆悬 架 系 统 是 一 个
" " 1 % ’ " "
" " " ’ "
- &’ . !" &’ . !( " " " - ’ . !(
&’ . !" ( - &’ - &+ ) . !( " " "
基于LQR控制的主动悬架优化设计
基于LQR 控制的主动悬架优化设计摘要:根据汽车行驶性能的要求,本文以1/4车辆模型为例,建立汽车的动力学模型,利用线性二次最优控制理论对主动悬架的LQG 控制器进行设计,并运用MATLAB/simulink 对汽车动力学模型进行仿真。
结果表明: 具有 LQG 控制器的主动悬架对车辆行驶 平稳性和乘坐舒适性的改善有良好效果。
关键词:主动悬架;被动悬架;LQG 控制器 引言悬架系统是汽车的重要部件, 对于汽车的平顺性、操稳性和 安全性都有着重要的影响, 而主动悬架是悬架发展的必然方向。
控制器的设计对于主动悬架性能的发挥起着重要的作用, 本文中以1/4汽车主动悬架为研究对象,建立汽车动力学模型和设计LQG 控制器算法,应用Matlab/Simulink 进行汽车系统的控制仿真。
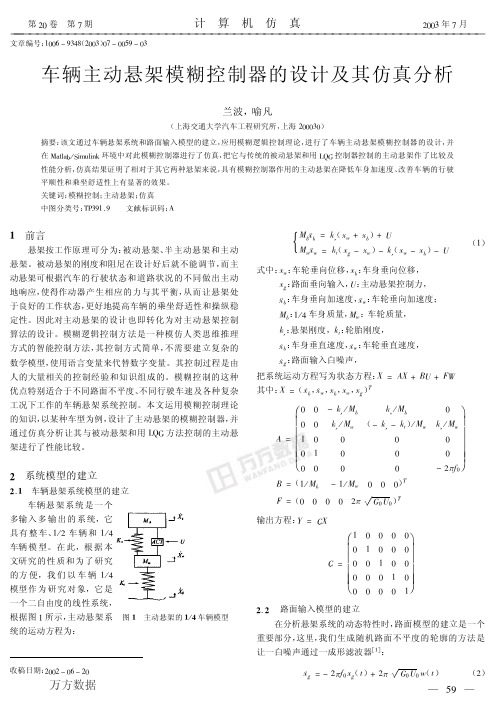
1 基于线性二自由度汽车模型的建立 1.1 被动悬架系统的建立车辆悬架系统是一个多输入多数徐彤,为了研究的方便性以及更好地与车辆行驶的情况相吻合,文本一1/4车辆模型为研究对象,车辆模型如图1所示。
图1:被动悬架车辆1/4模型根据图1所示,建立一个被动悬架车辆1/4模型,首先建立运动微分方程:()()()()()b b s b w s b w w w t w g s b w s b w m x K x x C x x m x K x x K x x C x x =----⎧⎪⎨=--+-+-⎪⎩整理得:⎪⎪⎩⎪⎪⎨⎧+--+-+-+-=-+-+-+-=gw t b w t s b w s b w s b w s w b b s b b s w b s b s bx m K x m K K x m K x m C x m C x x m K x m K x m C xb m C x (1) 式中:s C 为悬架阻尼,s K 为悬架刚度。
选取状态变量和输入向量为:[]w bw b x x x xX = g x U =则可将系统运动方程及路面激励写成状态空间矩阵形式,即:BU AX X+= 其中,A 为状态矩阵,B 为输入矩阵,其值如下:⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=0010001ws s w s w s w s bs b s b sbsm K K m K m C m C m K m K m C mC A ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=000w t m K B 将车身加速度、轮胎动变形、悬架动行程作为性能指标,即:T w b gw b x x x x x Y ][--=将性能指标项写为状态变量以及输入信号的线性组合形式,即:DU CX Y +=其中:⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡---=11001000bb b b m Ks m Ks m Cs m Cs C⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=010D 1.2 被动悬架系统的建立如图2所示,图2:被动悬架车辆1/4模型根据图2所示,建立一个主动悬架车辆1/4模型,首先建立运动微分方程:⎪⎩⎪⎨⎧+--=--+-=••••g w b s b b gw g t w b s w w U x x K x m U x x K x x K x m )()()( (3) 此时矩阵状态矩阵为:⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡---=0010010000w w bb m Ks Kt m Ks m Ks m KsA ⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡-=0000110w w b m m Ktm B ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡--=1100100000b b m Ks m Ks C ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-=000110b m D1.3 路面模型的建立在分析主动悬架控制过程时,路面输入是一个不可忽略的重要因素,本文利用白噪声信号为路面输入激励,)(2)(2)(000t w U G t x f t x g g ππ+-=•其中,0f 为下截止频率,Hz ;G 0为路面不平度系数,m 3/cycle ;U 0为前进车速,m/sec ;w为均值为零的随机输入单位白噪声。
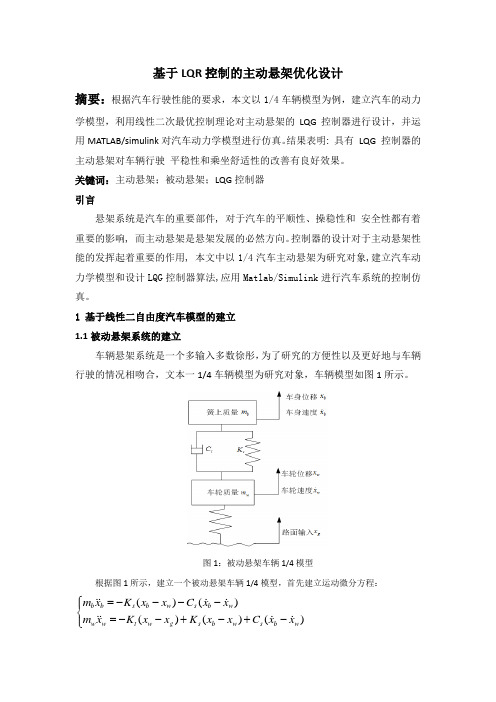
基于LQG最优调节器理论的车辆悬架分析及仿真

基于LQG最优调节器理论的车辆悬架分析及仿真作者:兰京来源:《科技创新与应用》2019年第10期摘; 要:文章建立了不平路面激励模型和带单轮的1/4车辆振动模型,旨在分析LQG控制器算法对于悬架性能的影响,并对车辆悬架进行综述。
对不平路面激励模型进行了仿真,证实了该模型在模拟路面情况的有效性。
用MATLAB对振动模型进行了仿真,通过选用不同的加权系数,得到了主动悬架在白噪声激励下的不同振动情况,说明加权系数的确定对LQG调节器的影响,并提出了一种确定LQG控制器加权系数的方法。
通过主、被动悬架的幅频特性曲线对比分析,得到了LQG控制器确实可以有效改善悬架系统的性能,主动悬架的工作性能优于被动悬架的结论。
关键词:LQG控制器;主、被动悬架;高斯白噪声;幅频特性;MATLAB中图分类号:TP391.9; ; ; ;文献标志码:A; ; ; ; ; ;文章编号:2095-2945(2019)10-0019-03Abstract: In this paper, the excitation model of uneven road surface and the vibration modelof 1/4 vehicle with single wheel are established. The purpose of this paper is to analyze the influence of LQG controller algorithm on suspension performance, and to summarize the vehicle suspension. The simulation of uneven pavement excitation model proves the effectiveness of the model in simulating pavement conditions. The vibration model is simulated by MATLAB, and the different vibration conditions of the active suspension excited by white noise are obtained by selecting different weighting coefficients, which shows the influence of the determination of the weighting coefficient on the LQG regulator. A method to determine the weighting coefficient of LQG controller is proposed. Through the comparative analysis of the amplitude-frequency characteristic curves of the active and passive suspension, it is concluded that the LQG controller can effectively improve the performance of the suspension system, and the working performance of the active suspension is better than that of the passive suspension.Keywords: LQG controller; active/passive suspension; White Gaussian Noise; amplitude-frequency characteristics; MATLAB前言汽車悬架连接着车桥和车架,汽车将行驶过程中车轮受到的作用力传递给车架上,对于汽车的操纵稳定性、行驶平顺性和乘坐舒适性起到了决定性作用。
Simulik在汽车主动悬架LQG控制仿真中的应用
!"# &’()*’+ ,’* -./*0).’( ’, 0 1*23.4.’( 54’+0).’( 1+0),’*6
&789 !.:;.(<
’ 234563 7489:;<8=>? %:4@>34@ !"#$$#? A5843(
!"#$%&’$! / 5>B;8C 98B;3=8D4 8<DE3=8D4 <><=:F DG H;:I8<8D4 8<DE3=8D4 HE3=GD;F 8< C:9:EDH:CJ 058< <><=:F 6<:< 38; <H;84@< 3< H3<<89: 98B;3=8D4 8<DE3=8D4 :E:F:4=< 34C @834= F3@4:=D<=;8I=89: 3I=63=D;< 3< 3I=89: 98B;3=8D4 8<DE3=8D4 :E:F:4=<J 05: 3I=89: 98B;3=8D4 ID4=;DE <><=:F 8< C:<8@4:C 3IID;C84@ =D =5: +,- ID4=;DE =5:D;>J 05: .3=E3B 8< 6<:C GD; <8F6E3=8D4 DG =5: <><=:FJ 05: <8F6E3=8D4 ;:<6E=< <5DK =53= =5: C:9:EDH:C 3I=89: 98B;3=8D4 ID4=;DE <><=:F 53< @DDC 8<DE3=8D4 H:;GD;F34I: 3@384<= =5: GEDD; C8<=6;B34I: 34C =5: C8;:I= C8<=6;B34I: D9:; K8C: G;:L6:4I> 3;:3J ()* +,%-# ! H;:I8<8D4 8<DE3=8D4 HE3=GD;FM 3I=89: 98B;3=8D4 ID4=;DEM +,-M @834= F3@4:=D<=;8I=89: 3I=63=D;
汽车主动悬架系统建模及动力特性仿真分析
汽车主动悬架系统建模及动力特性仿真分析对于汽车主动悬架系统建模和动力特性仿真分析,可以分为两个方面,即建模和仿真。
首先是汽车主动悬架系统的建模。
建模的目的是通过数学方程和物理模型来描述悬挂系统的运动和特性。
建模可以从两个方面入手,一是车辆运动模型,二是悬挂系统模型。
车辆运动模型是描述车辆整体运动的数学模型,它包括车辆的质心、惯性力、加速度等参数,并考虑到车辆在不同路面条件下的受力情况。
一般可以采用多自由度的运动方程来描述车辆的运动。
悬挂系统模型是描述悬挂系统特性的数学模型,它包括弹簧、阻尼、悬挂支架等组成部分,并考虑到悬挂系统的动力学特性,如频率响应、刚度、阻尼等参数。
根据悬挂系统的工作原理和设计参数,可以建立悬挂系统的数学模型。
其次是动力特性的仿真分析。
仿真分析的目的是通过数值计算和仿真模拟来模拟和预测悬挂系统在不同工况下的动力特性。
可以通过将建立的悬挂系统模型和车辆运动模型导入仿真软件中进行仿真分析。
动力特性的仿真分析包括四个方面:路面输入、悬挂系统响应、车辆运动和动力性能评估。
路面输入是指对车辆行驶过程中的路面输入进行模拟和预测,可以通过信号生成器生成不同频率、振幅和相位的路面输入信号。
悬挂系统响应是指悬挂系统对路面输入做出的响应。
可以通过差动方程、拉普拉斯变换等方法来求解悬挂系统的动态响应,并得到悬挂系统的频率响应曲线、阻尼比、刚度等参数。
车辆运动是指车辆在不同路面输入下的运动情况,包括车辆的加速度、速度、位移等参数。
可以通过对车辆运动模型进行数值计算和仿真模拟来模拟和预测车辆的运动情况。
动力性能评估是指对悬挂系统的性能进行评估和比较,可以通过对悬挂系统的频率响应、稳定性、舒适性等指标进行计算和分析,来评估悬挂系统的动力性能。
总的来说,汽车主动悬架系统的建模和动力特性仿真分析是一项复杂而又重要的任务,通过对悬挂系统的建模和仿真,可以帮助设计和优化悬挂系统,提高车辆的悬挂效果和驾驶舒适性。
LQG控制方法

1.主动悬架控制模型的建立车辆悬架系统是一个多输入多输出的系统。
它具有整车、1/2车辆和1/4车辆模型。
根据本文研究的性质和为了研究的方便,以车辆1/4模型作为研究对象(图1),它是一个二自由度的线性系统。
根据图1所示,主动悬架系统的运动方程为式中:M b为1/4车身质量;M w为车轮质量;U为控制器产生的作用力;K t为轮胎刚度;x0为路面的扰动输入;x1为车轮垂直位移量;x。
2为车身垂直加速度。
其状态方程与输出方程可写成如下形式:取状态变量X=(x2-x1,x。
2,x0—x1,x。
1)T作为状态变量,把系统运动方程写为矩阵形式:选取Y=[x。
2,x2-x1,x0—x1,k t(x0—x1)]T为输出变量。
这样主要考虑研究车辆平顺性时比较方便,故选取车身垂直加速度x。
2、悬架的动扰度x2-x1、车轮的跳动量x0—x1和车轮动载荷k t(x0—x1)为输出变量。
故得输出矩阵根据现代控制理论,对系统方程寻求控制U使二次型目标函数取最小值的问题就是二次型最优控制问题。
在悬架的设计中,必须综合考虑轮胎的接地性、车身的加速度及悬架的动挠度。
线性二次型最优控制可以借助加权系数,对各种性能指标进行综合考虑,取,为LQG控制器的性能指标。
在此三项的平方和中,以车身加速度x。
2为基准,系数取1,q1,q2的值是相对x。
2来说的,分别是轮胎动位移和悬架动挠度的加权系数。
根据最优控制理论,式(5)写成标准二次型的形式式中:Q为状态变量的加权矩阵,R为控制变量的加权矩阵。
其中这里,q l和q2为加权系数。
矩阵Q的大小与轮胎动位移加权系数q1和悬架动挠度加权系数q2有关,q l和q2取不同的值就意味着对不同的分量加不同的加权系数。
当某个分量要特别约束时,我们就可以增大此分量的权系数,若此分量对所要研究的问题影响无足轻重时,则可以设它的加权系数为零。
因此,正确选取加权矩阵的值是十分重要的,不同的加权系数对系统的特性具有不同的影响。
车辆主动悬架LQG控制器的设计与仿真分析(1)
W
BN5"FC5
W
W
W
W
W
W
W
W A#c@W W
eW
W
W
W
W
W
W
W
W A#c@Wg
h i W !"F4 W AL"IJ W A!"FC@ W W W W a
]6 W !"F4 W 8"IJ W W W A!"FC5 W W
l dW W W W W W W W #c jWkW
_6
eW W W W W W W W
/ 主动悬架系统和控制系统的建立
/0/ 悬架系统的建立 车 辆 悬 架 系 统 是 一 个 多 输 入 多 输 出 系 统-为 了
研究的方便以及更好地与车辆行驶的情况相吻合本文 以具 有 #自 由 度 的 $,!车 辆 模 型 为 研 究 对 象车辆模型如图 $所示=
前轴悬挂质量垂向位移
‘w12‘3]!7:45‘3]4
小)即可以取 @&,@(3@F,@K3@L,@M)在性能指标中以 ABC!和 ABCE为基准)即取 @&3@(均为 &.由最优控制理论)
把 式 GLJR GQJ写 成 标 准 二 次 型 形 式 )即 整 理 成
> 4,
89:
;< =
& ;
;
GTUVTD WUXWD (TUYWJO+
"
得
^ @FD@K " IZ@FD[@K "
W
W fa
l #c jWkWg
输 出 矩 阵 为 m6n[7o^X取 矩 阵 n为 !Wp !W的 单 的方法是让白噪声通过一成形滤波器h!iX所以前S后
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
QQ 车辆仰俯角的角加速度 ; B @QQ 前悬架弹簧刚度 QQ 后悬架弹簧刚度 B 5 QQ 后轮弹簧刚度 B B N @QQ 前轮弹簧刚度 N 5 3 C @QQ 前轴非悬挂质量的垂向位移 QQ 后轴非悬挂质量的垂向位移 3 C 5 3 5 @QQ 前轴受到的路面垂向激励
a a 为 作 动 器 控 制 力X > ‘6 = b!X b#> 为 输 入 白 噪 @ # 声X \为 系 统 矩 阵 X ]为 控 制 矩 阵 X _为 路 面 输 入 矩
阵 Z 其中 W W W W A! W W W W W W W W
a a
W " F4 AB @ W " I L B @ J W = B 7B > " FC @ N @ @ W W W W
K J
= # > = D > = E > = H >
QQ 后轴受到的路面垂向激励 3 5 5 QQ 车辆质心处的垂向位移 3 U T 令 R6 3 S S S S R6 3 R6 ; R6 ; R6 3 A 3 S
! # D E H 4 @ C @
6L = A3 > A8 = A3 > AL 78 M > I; B 3 B 3 @ @ @ 4 @ C @ 5 4 5 C 5 ! # = G 6AB 7L 7= 7B > A3 > A 3 3 B ; B 3 FC @ C @ N @ N @ @ N @ = 4 @ C @ 7B @ 3 ! N @ 5 @ G6AB A8 7= 7B> A3 > A FC 3 3 B ; B 3 5 C 5 N 5 N 5 5 N 5 = 4 5 C 5 式中 7B @ 3 # N 5 5 5 QQ ! " #车身质量 F4 d W W W W 6 \ W W W e 6 ] W ! W W W ! ! W W W W W W W W L B " FC N @ @ W W W 8 " I J W W W ! W AL W 8 W W W W = O > = P >
W AB " F4 5 W A8 B " I 5 J W W W = B 7B > " FC 5 N 5 5 W W
W W W W W W A! W W W
ห้องสมุดไป่ตู้
W W W W W B " FC N @ @ W W A# c @ W W
W f W W W W W W B " FC N 5 5 W g A# c @ W
对于 & 后轮受到的路面激励可以 ’ (车 辆 模 型 ) 延迟时间 * 认为是前轮激励的时间延迟 ) ,’ . + % "
= V >
= ! W >
第 &期
兰波 等 g车辆主动悬架 5 67 控制器的设计与仿真分析
& L
式中
## 下截止频率 ! " ## 车速 % "
## 路面不平度系数 $ "
## 后轴悬挂质量垂向加速度加权系数 @ ( ## 前轮轮胎动位移加权系数 @ F ## 后轮轮胎动位移加权系数 @ K ## 前轴悬架动挠度加权系数 @ L ## 后轴悬架动挠度加权系数 @ M 因为大部分车辆的悬挂质量 分配系 数在 " P Q R 之 间 接 近 于 所 以 可 以 近 似 认 为 前 后 轴 上 方 & P ( ) & ) 的 悬 挂 质 量 SC 和 垂向方向的运动相互影响很 SC ! E
Z $ o
收稿日期 >! " " ! " - " 兰 波 广州本田汽车公司研发中心 硕士 -& 万 方数据 $ " . " " 广州市 喻 凡 上海交通大学汽车工程研究所 教授 博士生导师 -! " " " % " 上海市
! E
农
业
机
械
学
报
#WWE年
FC @QQ 前轴非悬挂质量 QQ 后轴非悬挂质量 FC 5 I JQQ 车辆绕 J轴的转动惯量 QQ 前轴到车辆质心处的距离 L QQ 后轴到车辆质心处的距离 8 QQ 前轴主动悬架控制力 @ ! QQ 后轴主动悬架控制力 @ # QQ 车辆仰俯角 ;
/ 主动悬架系统和控制系统的建立
/ 0 / 悬架系统的建立 车 辆 悬 架 系 统 是 一 个 多 输 入 多 输 出 系 统为了
研究 的方便 以及 更 好 地 与 车 辆 行 驶 的 情 况 相 吻 合 -
本文 以具 有 #自 由 度 的 $ , !车 辆 模 型 为 研 究 对 象 车辆模型如图 $所示 = 前轴悬挂质量垂向位移 2‘ 3] 5‘ 3] ‘ ! 7 : 4 4 w 1
AB " FC W N @ @
" FC W A8 B " FC AB N 5 5 N 5 5
hW !" F
W ! " F4 W AL " I W A! " FC W J @
4
W A! " FC W W 5
i
d f W W W W W W W W # cl j k W W W 6 _ eW W W W W W W W g W # cl j k W W ! i 输出 矩 阵为 m 取矩 阵 n为 ! 的方法是让白噪声通过一成形滤波器 h 所以前 S 后 6n X W p! W的 单 X [7o ^ 位阵 X 也即是 m 车轮受到的路面激励为 6[Z o 为零矩阵 X q r s 路面模型的建立 在 分 析 悬 架 系 统 的 动 态 特 性 时X 路面模型的建 万方数据 立是一个重要部分 Z 这里 X 生成随机路面不平度轮廓 T 6A# 7# j k R c @ R cl b! V W V W W T6A# 7# j k R c @ R cl b# ! W W ! W W W
B C D E F GH G IJ E KL M H N E O GP G H M Q D E D O R ’ ( )S O G N T O M M C TO R P U N E V CJ L D W C G D E O G
. 2 :X Y p9q 2 : Z [ \ ] ^ _ ‘ a b \cb ^ d ]e\ f b gb h i j k l b g m ] ^ n o Z r a ] ^ _ a ] i s i ] b f b ^ _t ^ i u k v w i f n o P x D N T H U N , !y A$ 2 z 8Y { | 4 2 : {2z Y 2 {7 : } 9 3 8Y { | 4 ~| z | | ! 3 2 5 4 7 ! " | {5 2 ! | {Y :3 " | Y } 3 7 82 4 y Y : 3 z Y 4 3 " | Y z # ’A ! ~" 7 y "~2 !9 ! | {3 Y{ | ! 7 $ :2. /0 y Y : 3 z Y 4 4 | z Y % 2 9 3 Y 8Y 5 7 4 |2 y 3 7 & |! 9 ! } | : ! 7 Y : # ! 3 | 8! 7 89 4 2 3 7 Y : , ’q 8Y { | 45 2 ! | {Y : 12 3 4 2 5 6 7 89 4 7 : ;| : & 7 z Y : 8| : 3 ~2 !5 9 7 4 32 : {9 ! | {% Y z! 7 89 4 2 3 7 Y : Y 9 z -5 -} -! } | z % Y z 82 : y |7 : { | ( | ! Y { #2 y y | 4 | z 2 3 7 Y : 7 3 y "2 : $ 4 |2 y y | 4 | z 2 3 7 Y : 9 ! } | : ! 7 Y :{ # : 2 87 y3 z 2 & | 4 2 : { ’) -~| 3 7 z |{ " # : 2 87 y{ | % 4 | y 3 7 Y : z |y Y 8} 2 z | { |! 7 89 4 2 3 7 Y :z | ! 9 4 3 !{ | 8Y : ! 3 z 2 3 | {3 " 2 33 " |2 y 3 7 & | ! 9 ! } | : ! 7 Y : ~7 3 " 2. /0 y Y : 3 z Y 4 4 | zy Y 9 4 {7 8} z Y & |2 9 3 Y 8Y 5 7 4 |z 7 { 7 : $y Y 8% Y z 3} | z % Y z 82 : y | ’ | : Y z 8Y 9 ! 4 # -Ay -. -6 Q+ O T I D ,| " 7 y 4 | 3 7 & |! 9 ! } | : ! 7 Y : /0 y Y : 3 z Y 4 4 | z 7 89 4 2 3 7 Y : *C
TS 63 A3 S 63 TS 63 S 6 X Y 63 R 3 M C @ R O 4 5 C 5 R P C 5 R V 5 @ R ! W 5 5 R ! 作为状态变量 Z把系统的运动学方程写为状态方 R ! W T 程 形式 [ 其 中 [6 = 6\ 7_ X X X X [7] ^ ‘X R R R R ! # D E a X X X X X > 为 系 统 状 态 变 量X X R R R R R R ^6 = @ H M O P V ! W !
!""#年 $月
农 业 机 械 学 报
第 % &卷 第 $期
6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6