支导线坐标计算表
导线测量、三角高程、支导线计算说明

工地通路测导线测量、三角高程、支导线计算操作模式分为两种:1、现场联机全站仪现场测量、记录、平差;2、对已经有整理好的内业资料情况,提供数据导入功能,导入测量记录完成平差计算。
一、现场联机全站仪测量、记录、平差操作流程:1、点击主界面导线平差,进入导线平差界面,点击底部按钮创建导线2、输入导线的起终点闭合数据。
起点后视点位起点测站的后视点,终点前视为终点测站的前视点。
3、添加测站,写入测站名称、后视名称、前视名称。
4、点击测站条目弹出测回列表对话框,点击添加测回按钮进入测量界面。
5、输入仪器高、前后视棱镜高。
6、连接全站仪后点击测量完成正镜后视、正镜前视、倒镜前视、倒镜后视测量,软件获取全站仪数据并记录(或者手工输入数据),点击确定按钮完成本测回测量。
7、逐个完成测站和对应的测回测量。
8、在导线测量界面点击右上角三个点导出测量记录和导线平差计算表。
二、导入已有的导线观测数据:1、导入工地通路测导线观测文件点击导线平差界面右上角三个点,点击导入工地通观测文件,弹出导入对话框,在手机存储目录中找到数据文件,点击完成导入。
2、导入附合导线进行平差计算并完成成果表点击导线平差界面右上角三个点,点击附合导线平差计算按钮,弹出导入对话框,对话框中提示要导入的文件格式的内容,本文件在Excel编辑上按照要求编辑后,选择单元格右键复制,黏贴到一个TXT文件中,将这个TXT文件发送到手机上,在手机存储目录中找到数据文件,点击完成导入,软件同时完成附合导线简易平差计算,并生成计算表。
3、导入三角高程数据计算并完成成果表点击导线平差界面右上角三个点,点击三角高程计算按钮,弹出导入对话框,对话框中提示要导入的文件格式的内容,本文件在Excel编辑上按照要求编辑后,选择单元格右键复制,黏贴到一个TXT文件中,将这个TXT文件发送到手机上,在手机存储目录中找到数据文件,点击完成导入,软件同时完成三角高程平差计算,并生成计算表。
导线
第三节 导线测量的内业计算导线测量内业计算的目的就是计算各导线点的平面坐标x 、y 。
计算之前,应先全面检查导线测量外业记录、数据是否齐全,有无记错、算错,成果是否符合精度要求,起算数据是否准确。
然后绘制计算略图,将各项数据注在图上的相应位置,如图6-11所示。
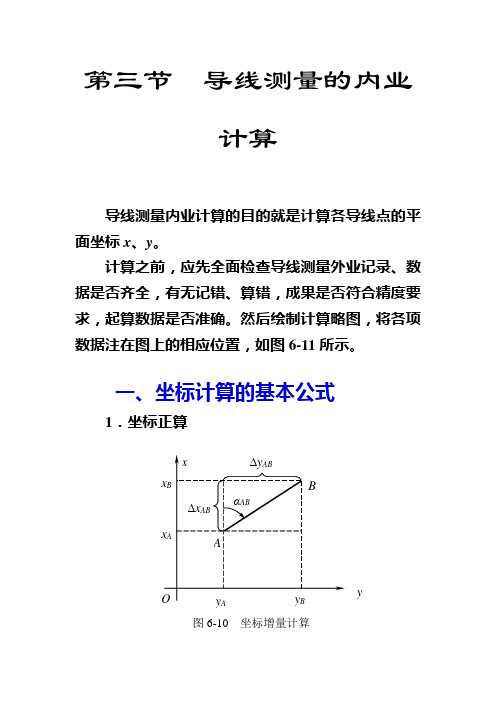
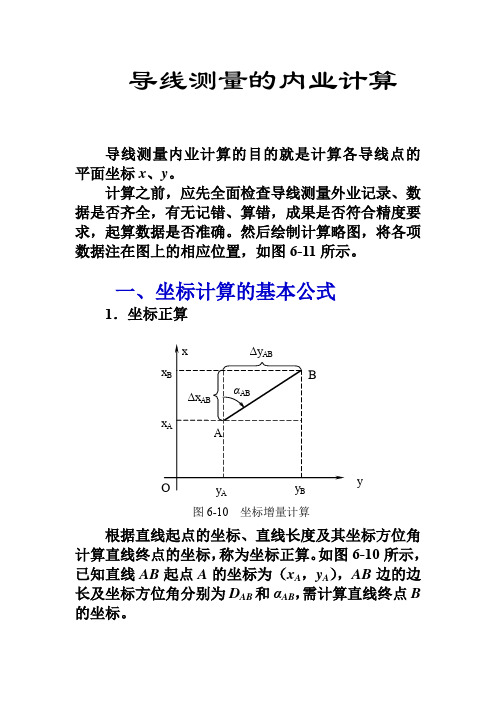
一、坐标计算的基本公式1.坐标正算根据直线起点的坐标、直线长度及其坐标方位角计算直线终点的坐标,称为坐标正算。
如图6-10所示,y图6-10坐标增量计算已知直线AB 起点A 的坐标为(x A ,y A ),AB 边的边长及坐标方位角分别为D AB 和αAB ,需计算直线终点B 的坐标。
直线两端点A 、B 的坐标值之差,称为坐标增量,用Δx AB 、Δy AB 表示。
由图6-10可看出坐标增量的计算公式为:⎭⎬⎫=-=∆=-=∆AB AB A B AB AB AB A B AB D y y y D x x x ααsin cos(6-1)根据式(6-1)计算坐标增量时,sin 和cos 函数值随着α角所在象限而有正负之分,因此算得的坐标增量同样具有正、负号。
坐标增量正、负号的规律如表6-5所示。
表6-5 坐标增量正、负号的规律则B 点坐标的计算公式为:⎭⎬⎫+=∆+=+=∆+=AB AB A AB A B AB AB A AB A B D y y y y D x x x x ααsin cos(6-2)例6-1 已知AB 边的边长及坐标方位角为456380m 62.135'''︒==AB AB D α,,若A 点的坐标为m 82.658m 56.435==A A y x ,,试计算终点B 的坐标。
解 根据式(6-2)得2.坐标反算根据直线起点和终点的坐标,计算直线的边长和坐标方位角,称为坐标反算。
如图6-10所示,已知直线AB 两端点的坐标分别为(x A ,y A )和(x B ,y B ),则直线边长D AB 和坐标方位角αAB 的计算公式为:22AB AB ABy x D ∆+∆= (6-3)AB ABAB x y ∆∆=arctanα (6-4)应该注意的是坐标方位角的角值范围在0˚~360˚间,而arctan 函数的角值范围在-90˚~+90˚间,两者是不一致的。
闭合导线

闭合导线:名称表示原理(导线长) D 实测边长总合(角度总和)∑β 实测左角相加的总和(角度闭合差)Fβ 实测左角相加的总和的秒位数(坐标闭和差)Fx △x计算出的坐标增量之合Fy △y计算出的坐标增量之合(距离闭合差) F Fx平方加Fy平方开根号(导线精度)K F/D(1÷F×D)附合导线:名称表示原理(导线长) D 实测边长总合(角度总和)∑β 实测左角相加的总和(角度闭合差)Fβ 实测推算出的终点方位角减理论的终点方位角(坐标闭和差)Fx △x总合减(终点x坐标减起始x坐标)Fy △y总合减(终点y坐标减起始y坐标)(距离闭合差) F Fx平方+Fy平方开根号(导线精度)K F/D(1÷F×D)坐标增量计算:△x12=D12×cosa12△y12=D12×sina12D :实测两点间的距离。
a :实测两点间的方位角。
近似平差方法:①将角度闭合差除以测站数:Fβ÷N(N表示测站数)=∩(角度均值),然后将角度均值加到实测右角中。
②将Fx平方加Fy平方开根号,得出距离闭合差,用距离闭合差除以观测边长数得出距离均值,然后将距离均值加到每一条实测边长中。
③从起测点开始,再通过公式△x12=D12×cosa12 、△y12=D12×sina12求出坐标增量。
用上一测站的坐标加上坐标增量就得出平差后的坐标第三节 导线测量的内业计算导线测量内业计算的目的就是计算各导线点的平面坐标x 、y 。
计算之前,应先全面检查导线测量外业记录、数据是否齐全,有无记错、算错,成果是否符合精度要求,起算数据是否准确。
然后绘制计算略图,将各项数据注在图上的相应位置,如图6-11所示。
一、坐标计算的基本公式 1.坐标正算根据直线起点的坐标、直线长度及其坐标方位角计算直线终点的坐标,称为坐标正算。
如图6-10所示,已知直线AB 起点A 的坐标为(x A ,y A ),AB 边的边长及坐标方位角分别为D AB 和αAB ,需计算直线终点B 的坐标。
导线测量及计算..
右角
观测方法:单导线采用方向观测法观测左角或右角,支导线 观测左右角,导线网采用全圆方向观测法测角。 (二)、测边: 光电测距仪:目前是测距的主要方法,测距仪等级不同对不 同等级的导线测距的技术要求不同。测距仪的等级是按标 称精度划分。 mD=(a+b×D) mD—测距中误差: a-标称精度中的固定误差: b—标称精度中的比例误差系数: D—测距长度:
f
f x2 f y2
1 K S T f
考虑导线误差与边长有关,衡量导线精度用相对误差表示。
图根导线精度要求:
K
1 2000
3、坐标增量闭合差的调整:
调整原则:以相反符号按边长比例分配到各边长的坐标增量 中去。其坐标增量改正数为:
Vxi V yi fx Si S
S
导 线 测 量
要点: 1、导线的布设形式, 各种形式使用条件。 2、导线的外业工作 包括的内容及精度 要求。 3、导线测量计算
导线的布设形式及要求
一、导线的形式: (一)、闭合导线:如图,从一点开始 经过一系列的导线点,最后又回到原来 的起始点形成一多边形。 (二)、附和导线:如图, B βA 1 2 3 βp P B βA A 7 5 6 3 2 Q 4
∆xAB
α
AB
S
∆yAB
x AB xB x A d cos AB y AB y B y A d sin AB
xA o
A yA
yB
y
以上,根据已知点的坐标、已知边长和坐标方位角计算出 该边的坐标增量,并计算出另一点的坐标的方法称为坐 标正算。用普通计算机计算坐标增量的方法: 例:已知坐标方位角α 12=24°36′00“ 已知边长231.30m
导线测量的内业计算
导线测量的内业计算导线测量内业计算的目的就是计算各导线点的平面坐标x 、y 。
计算之前,应先全面检查导线测量外业记录、数据是否齐全,有无记错、算错,成果是否符合精度要求,起算数据是否准确。
然后绘制计算略图,将各项数据注在图上的相应位置,如图6-11所示。
一、坐标计算的基本公式1.坐标正算根据直线起点的坐标、直线长度及其坐标方位角计算直线终点的坐标,称为坐标正算。
如图6-10所示,已知直线AB 起点A 的坐标为(x A ,y A ),AB 边的边长及坐标方位角分别为D AB 和αAB ,需计算直线终点B 的坐标。
y图6-10 坐标增量计算直线两端点A 、B 的坐标值之差,称为坐标增量,用Δx AB 、Δy AB 表示。
由图6-10可看出坐标增量的计算公式为:⎭⎬⎫=-=∆=-=∆AB AB A B AB AB AB A B AB D y y y D x x x ααsin cos(6-1)根据式(6-1)计算坐标增量时,sin 和cos 函数值随着α角所在象限而有正负之分,因此算得的坐标增量同样具有正、负号。
坐标增量正、负号的规律如表6-5所示。
表6-5 坐标增量正、负号的规律则B 点坐标的计算公式为:⎭⎬⎫+=∆+=+=∆+=AB AB A AB A B AB AB A AB A B D y y y y D x x x x ααsin cos(6-2)例6-1 已知AB 边的边长及坐标方位角为456380m 62.135'''︒==AB AB D α,,若A 点的坐标为m 82.658m 56.435==A A y x ,,试计算终点B 的坐标。
解 根据式(6-2)得6.792456380sin m 62.135m 82.658sin .457456380cos m 62.135m 56.435cos ='''︒⨯+=+=='''︒⨯+=+=AB AB A B AB AB A B D y y D x x αα2.坐标反算根据直线起点和终点的坐标,计算直线的边长和坐标方位角,称为坐标反算。
第五章 点的坐标计算

第五章 点的坐标计算导读 控制测量就是确定控制点位置的工作。
根据范围大小建立的控制网分为国家控制网、城市及工程控制网和小地区控制网三种。
在测量的计算工作中,根据某直线的方位角、水平距离和一个端点的坐标,计算直线另一端点的坐标的工作称为坐标正算。
而根据直线两个端点的坐标要求计算直线的方位角和水平距离的工作称为坐标反算。
在建筑工程测量计算中,还常用到建筑坐标系与测量坐标系之间的坐标换算工作。
5.1控制测量概述为了限制测量误差的累积,确保区域测量成果的精度分布均匀,并加快测量工作进度,测量工作应按照“从整体到局部,先控制后碎部”这样的程序开展。
即在一个大范围内从事测量工作,首先应从整体出发,在区域内选择少数有控制意义的点,组成整体控制网,用高精度的仪器、精密的测量方法,求出各控制点的位置,这项工作称为控制测量。
控制点的位置确定以后,再以各控制点为基准,确定其周围各碎部点的位置,这项工作称为碎部测量。
控制网分为平面控制网和高程控制网。
测定控制点平面位置的工作,称为平面控制测量。
测定控制点高程的工作,称为高程控制测量。
根据其范围大小和功能不同,测量控制网分为国家控制网、城市控制网和小地区控制网。
国家控制网是在全国范围内建立的控制网,它为统一全国范围内的坐标系统和高程系统,并为各种工程测量提供控制依据。
国家控制网按精度由高到低分为一、二、三、四共四个等级。
它的低级点受高级点控制。
一等精度最高,是国家控制网的骨干,二等精度次之,它是国家控制网的全面基础。
三、四等是在二等控制网下的进一步加密。
国家平面控制网如图5.1所示,主要布设成三角网。
即将相邻的控制点组成互相连接的三角形。
这些组成三角形的控制点称为三角点。
通过在三角点上设置测量标志,精密测量起始边的方位角,精密丈量三角网中一条或几条边的边长,并测出所有三角形的水平角,经过计算,求出各三角形的边长,最后根据其中一点的已知坐标和一边的已知方位角,进而推算出各三角点的坐标。
导线测量平差记录表
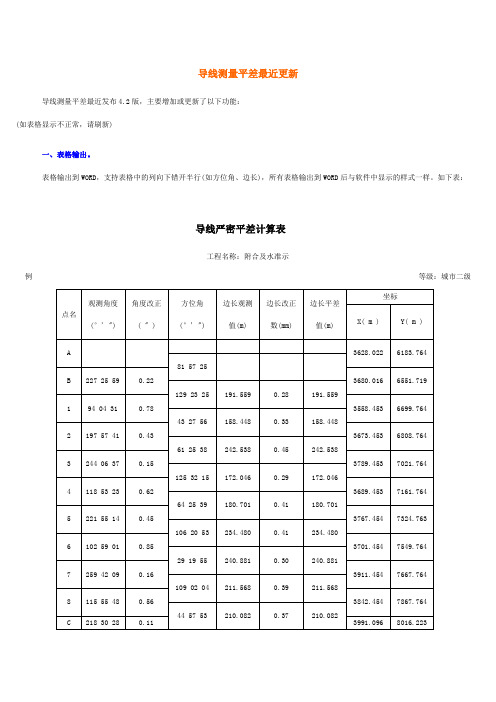
导线测量平差最近更新导线测量平差最近发布4.2版,主要增加或更新了以下功能:(如表格显示不正常,请刷新)一、表格输出。
表格输出到WORD,支持表格中的列向下错开半行(如方位角、边长),所有表格输出到WORD后与软件中显示的样式一样。
如下表:导线严密平差计算表工程名称:附合及水准示例等级:城市二级计算者:杨运英校核者:日期:2003.08.28二、导线采用近似平差且方位角边长不进行反算时的表格样式。
原表格中显示的是坐标增量改正数,现增加了一个选项,可以选择显示改正后的坐标增量,以满足一些工程要求格式统一的要求。
导线平差计算表工程名称:附合及水准示例等级:城市二级计算者:杨运英校核者:日期:2003.08.28、坐标导线平差。
指使用全站仪直接观测坐标、高程的闭、附合导线,其中平面坐标完全差的分配方式可以选用“按边长”、“按坐标增量”、“坐标转换”等方式。
坐标导线平差计算表工程名级:城市二级:杨运英校核者:日期:200四、单面单程水准记录计算已知点较密时线路中间也可以穿过已知点。
当含有中视时可以用于中平测量等,表格形式如下:水准测量记录计算表测线:仪器:观测:天气:地点:记录:计算者:校核者:日期:不含有中视时可用于五等、等外水准等的记录、计算。
表格形式如下:水准测量记录计算表测线:仪器:观测:天气:地点:记录:计算:校核:日期:部测量知点设站,后视另一已知点,观测各碎部点,计算其坐标、高程,绘制图形并可输出到CAD。
方式可以选用“斜距+天顶距”、“平距+高差”或“视距+天顶距”。
距+高差”方式表格如下:碎部测量记录后视:B 测站高程:仪高:气:复核:距”(或“斜距+天顶距”)表格如下:碎部测量记录后视:B 测站高程:指标差:0" 天气:记录:日期:坐标转换于同椭球的不同坐标系间进行转换。
比如同椭球的国家坐标系与工程独立坐标系的转换。
坐标转换计算表工程名第页计算:复核:日期:支导线计算里指输入方位角与边长计算坐标的支导线,如需输入水平角、边长计算各点坐标,请使用“平差计算”模块中的支导线进行计算。
测量教学:导线测量的内业计算
*
x xB
x ∆yAB B
∆xAB
DAB
AB
xA
A
O
yA
yB
y
坐标增量正、负号的规律如下表所示。
象限 坐标方位角α
Δx
Δy
Ⅰ
0˚~90˚
+
+
Ⅱ
90˚~180˚
-
+
Ⅲ
180˚~270˚
-
-
Ⅳ
270˚~360˚
+
-
则B点坐标的计算公式为:
*
例6-1
已知AB边的边长及坐标方位角为, ;若A点的坐标为,
500.00 683.35 655.21
419.53 307.99
500.00
416.10 154.23
204.27 370.74
1 2 3 4 5
1 1212702 10 1212652 335708 231.40 191.95 129.24 192.01 129.26 500.00 500.00 1
辅 Wx xm 0.30m
Wy ym 0.09m
助 WD
Wx2
W
2 y
0.30m2 0.09m2
0.31m
计 算
WK
WD D
0.31m 1137.80m
1 3600
<WK p
1 2000
(2)计算坐标增量闭合差 *
闭合导线,纵、横坐标增量代数和的理论值应 为零,即
实际计算所得的∑△xm 、 ∑△ym 不等于零, 从而产生纵坐标增量闭合差Wx和横坐标增量闭合 差Wy,即
测量教学:导线测量的内业计算
导线测量内业计算的目的就是计算各 导线点的平面坐标x、y。