迟滞非线性系统辨识与补偿控制研究
hysteresis parameter 迟滞参数-概述说明以及解释
hysteresis parameter 迟滞参数-概述说明以及解释1.引言1.1 概述迟滞参数是指描述系统响应速度与输入信号变化速度之间关系的重要参数。
在物理、工程、经济等多个领域中,迟滞参数被广泛应用于系统动态响应的研究和优化。
迟滞参数反映了系统对输入信号的延迟和滞后响应的特性,不同的迟滞参数数值代表了不同的系统动态行为。
迟滞参数的评估和分析对于理解和优化系统性能至关重要。
通过研究系统的迟滞参数,可以揭示系统的动态特性、稳定性以及对外部输入的响应速度。
通过对迟滞参数的量化和计算,可以为系统的控制和调节提供有效的指导。
本篇文章将围绕迟滞参数的定义、计算方法、应用领域以及其对系统性能的影响展开研究。
在结论部分,我们将讨论迟滞参数的优化方法和未来的发展趋势。
通过深入了解迟滞参数的概念及其在不同领域中的应用,有助于我们更好地理解系统动态响应的特性,并为系统的设计和优化提供有益的指导。
1.2文章结构文章结构的目的是为了规划文章的组织结构,使读者能够清晰地了解到文章的内容和逻辑顺序。
本文分为引言、正文和结论三个部分。
引言部分旨在引入迟滞参数(hysteresis parameter)的概念和研究意义,为读者提供一个整体的认识。
具体包括概述、文章结构和目的。
概述部分将介绍迟滞参数的基本定义和相关背景信息,解释迟滞现象产生的原因以及其在实际应用中的重要性。
文章结构部分则是针对本篇长文的具体内容和组织框架进行介绍。
首先,我们将讨论迟滞参数的定义,探讨其在不同领域中的应用。
其次,我们将介绍迟滞参数的计算方法,包括数学模型和实验测量方法。
最后,我们将探讨迟滞参数对系统性能的影响,分析其优化方法,并展望迟滞参数的未来发展趋势。
正文部分是本文的核心内容,将详细讨论迟滞参数的定义、计算方法和应用领域。
我们将介绍迟滞参数的具体数学定义和描述,在此基础上阐述其计算方法的不同类型和适用范围。
同时,我们将深入探讨迟滞参数在不同领域中的应用,如材料科学、物理学、化学等。
压电陶瓷叠堆执行器及其系统的迟滞现象模拟、线性化及控制方法的研究
压电陶瓷叠堆执行器及其系统的迟滞现象模拟、线性化及控制方法的研究压电陶瓷执行器(Piezoelectric ceramic actuators, PCAs)是一种利用压电材料的逆压电效应制作而成的微位移执行器,具有体积小、能量密度高、分辨率高、频响快等优点,已经成为精密定位系统中重要定位及驱动元件。
由于基于单片压电陶瓷晶片的压电陶瓷执行器的输出位移比较小,常常采用一定的工艺将多片压电陶瓷晶片和电极叠合而成压电陶瓷叠堆执行器(Piezoelectric ceramic stackactuators, PCSAs)以提高输出位移。
然而这种通过一定的工艺叠合而成的压电陶瓷叠堆执行器存在的一些缺点限制了其在快速、高精密定位系统中的应用:首先压电陶瓷叠堆执行器会进一步加剧压电陶瓷晶片的输出位移与驱动电压之间存在多值对应的迟滞现象,如何实现对压电陶瓷叠堆执行器的有效控制成为精密定位控制研究中的重点和难点之一;其次叠合工艺会影响压电陶瓷叠堆执行器的动态性能,甚至缩短其使用寿命。
因此,压电陶瓷叠堆执行器及其系统的迟滞线性化方法及压电陶瓷叠堆执行器的动态性能设计方法是压电陶瓷叠堆执行器在快速、高精密定位系统中应用时必须解决的问题,开展这方面的研究具有重要学术意义和工程应用前景。
为了解决上述问题,本文建立了能描述压电陶瓷叠堆执行器的迟滞现象的Bouc-Wen数学模型,提出了基于Bouc-Wen数学模型的线性化控制方法用于实现压电陶瓷叠堆执行器的迟滞线性化;建立了能够同时模拟压电陶瓷叠堆执行器的迟滞现象和动态特性的综合模型,提出了能够合理设计压电陶瓷叠堆执行器的动态性能的方法;建立了预压紧压电陶瓷执行器的现象模型;在此基础上,提出并实现了压电致动二维微位移扫描平台的基于现象模型的鲁棒模型参考自适应控制方法。
本文的主要研究工作和创新点可以归纳为以下六个方面:1.提出并研究了能够模拟压电陶瓷叠堆执行器的迟滞现象的Bouc-Wen数学模型。
三线性系统校正中的非线性特性分析与补偿

三线性系统校正中的非线性特性分析与补偿在三线性系统校正中,非线性特性的分析与补偿起着重要的作用。
非线性特性是指系统输出与输入之间的关系不满足线性方程的情况,这对于系统的准确性和性能影响很大。
本文将对非线性特性的分析与补偿进行探讨,以帮助理解和应用于实际系统中。
首先,我们需要了解非线性特性的类型和来源。
一般来说,非线性特性可以分为静态非线性和动态非线性两种。
静态非线性是指系统输出与输入之间的关系在任何时刻都是非线性的。
常见的静态非线性包括饱和非线性、死区非线性、滞后非线性等。
其中,饱和非线性是指当输入信号达到一定幅值时,系统输出不能再随输入的增加而继续增加,而是保持在一个上限值;死区非线性是指在系统输入的一定范围内,系统输出保持不变,只有当输入信号超出这个范围时才会有响应;滞后非线性是指当输入信号变化方向改变时,系统的响应也有一定的延迟。
动态非线性是指系统输出与输入之间的关系在不同时刻是非线性的。
常见的动态非线性包括时滞非线性、时变非线性等。
时滞非线性是指系统的响应具有一定的延迟,即输出值在输入信号变化之后才能开始发生变化;时变非线性是指系统的非线性特性随时间变化而变化。
了解了非线性特性的类型后,我们可以结合具体的三线性系统,分析其非线性特性来源。
三线性系统通常由线性部分和非线性部分组成。
线性部分表示系统在输入信号较小的幅值范围内,其输出与输入之间的关系为线性关系,输出与输入之间的比例关系保持不变。
非线性部分则表示系统在输入信号较大的幅值范围内,输出与输入之间的关系更加复杂,无法用简单的线性关系描述。
在分析非线性特性时,常用的方法之一是通过系统的输入输出数据进行建模分析。
可以采用曲线拟合等方法,将输入输出数据作为样本点,通过拟合曲线来描述系统的非线性特性。
在建模过程中,需要考虑系统的非线性特性的类型,选择合适的数学模型进行拟合。
另一种分析非线性特性的方法是频域分析。
通过对系统输入信号进行傅里叶变换,将输入信号转化为频域表示,在频域上分析系统的输出信号。
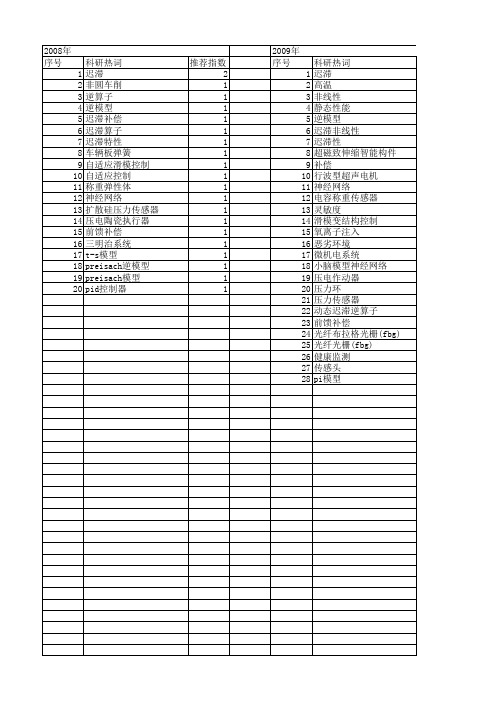
【国家自然科学基金】_迟滞补偿_基金支持热词逐年推荐_【万方软件创新助手】_20140803
推荐指数 4 2 2 2 2 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 12 13 14 15 16 17 18
2012年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52
2014年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13
2014年 科研热词 迟滞区间 自适应 滑模控制 温度补偿 液压源 流量控制 欠压锁定 模型控制 条件补偿 带隙比较器 前馈补偿 伺服驱动 priesach逆模型 推荐指数 1 1 1 1 1 1 1 1 1 1 1 1 1
推荐指数 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2010年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
科研热词 迟滞 神经网络 鲁棒控制 静态补偿 逆模型 迟滞误差 超磁致 补偿 自适应 脉冲反馈 纯水液压 滞环 温度补偿 比例溢流阀 恒弹性合金 建模 定位精度 反馈误差学习控制 压电陶瓷定位器 分类排序 光纤光栅 光纤光学 仿真 preisach迟滞模型
推荐指数 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2011年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22
非线性系统系统辨识与控制研究
非线性系统系统辨识与控制研究引言:非线性系统是指系统在其输入与输出之间的关系不符合线性关系的系统。
这种系统具有复杂的动态行为和非线性特性,使得其辨识与控制变得非常具有挑战性。
然而,非线性系统在现实生活中的应用非常广泛,例如电力系统、机械系统和生物系统等。
因此,对非线性系统的系统辨识与控制研究具有重要意义。
一、非线性系统辨识方法研究1. 仿射变换法仿射变换法是一种常用的非线性系统辨识方法之一。
它通过将非线性系统进行仿射变换,将其转化为线性系统的形式,从而利用线性系统辨识的方法进行处理。
该方法适用于具有输入输出非线性关系的系统,但对于参数模型的选择和计算量较大的问题需要进一步研究。
2. 基于神经网络的方法神经网络作为一种强大的表达非线性关系的工具,被广泛应用于非线性系统辨识。
基于神经网络的方法可以通过训练神经网络模型,从大量的输入输出数据中学习非线性系统的映射关系。
该方法的优点是可以逼近任意非线性函数,但对于网络结构的选择和训练过程中的收敛性等问题还需深入研究。
3. 基于系统辨识方法的非线性系统辨识传统的系统辨识方法主要适用于线性系统的辨识,但其在非线性系统辨识中也有应用的价值。
通过对非线性系统进行线性化处理,可以将其转化为线性系统的辨识问题。
同时,利用最小二乘法、频域法等常用的系统辨识方法对线性化后的系统进行辨识。
这种方法的优势在于利用了线性系统辨识的经验和技术,但对于线性化的准确性和辨识结果的合理性需要进行评估。
二、非线性系统控制方法研究1. 反馈线性化控制反馈线性化是一种常用的非线性系统控制方法。
该方法通过在非线性系统中引入反馈控制器,将非线性系统转化为可控性的线性系统。
然后,利用线性系统控制方法设计控制器,并通过反馈线性化控制策略实现对非线性系统的控制。
该方法的优点在于简化了非线性系统控制的设计和分析过程,但对于系统的稳定性和性能等问题还需要进行进一步的研究。
2. 自适应控制自适应控制是一种针对非线性系统的适应性控制方法。
【国家自然科学基金】_智能化控制_基金支持热词逐年推荐_【万方软件创新助手】_20140802
神经网络 短信 矩阵式变换器 知识库 矢量控制系统 直接转矩控制 直升机旋翼 盒形件 电话遥控 生物安全 环流抑制 率相关迟滞非线性系统 熔透控制 激光技术 温湿度控制 温差电池 温室 清洁分布式能源 液流通量 液压驱动阀门 液压支架 测试系统 测控系统 永磁同步电机 水产养殖 步进电机 模糊树模型 模糊控制 模型参考自适应 楼层重复度 检测 标定装置 板材成形智能化控制 机电设备模拟器 机器视觉与听觉 机器人 最小二乘法 最大功率点跟踪 最佳铒纤长度 智能调度 智能电网 智能建模 智能化设备 智能化建模与控制 智能仿真 智能交通 无线 数据融合 数字化电网 数字化控制 数字化 散货码头 故障隔离 支持向量机
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106
磁致伸缩 磁悬浮轴承 硬件 研究进展 矿柱回采 知识空间 眼睛定位 目标清洁度 电火花加工技术 电梯群控系统 电机控制 电子地图 电动汽车 电力线通信 现代机械 煤自然发火 焊接自动化 火灾 激光熔样系统 潮汐模拟 滤波函数 滞回性能 温度传感器 温室 消防联动 测控系统 流变性能 污染控制 汇聚节点 水辅注塑 毛细管电泳 模糊控制 模糊pi控制器 模块化设计 植物电信号 标定 柔性时间触发控制器局域网络 板材成形 机载武器 最小二乘支持向量机 最佳阈值 智能磁轴承 智能模型 智能弹性架构 智能导航图 智能家电 智能化阅卷 智能决策 智能作动器 智能优化设计 智能仪表 时栅 无线传感器网络 无线
补偿预测误差的非线性系统广义预测控制
补偿预测误差的非线性系统广义预测控制
郭健;陈庆伟;吴晓蓓;胡维礼
【期刊名称】《南京理工大学学报(自然科学版)》
【年(卷),期】2005(029)002
【摘要】将一类非线性系统等价表示为时变线性系统,研究了非线性系统的广义预测控制.利用三次样条基函数多项式逼近时变系数,将时变参数的估计转化为定常参数的估计.为了提高输出预报精度,采用小波网络对预报误差进行预测,作为输出预报的补偿.仿真研究结果表明了所提方法的有效性.
【总页数】5页(P127-131)
【作者】郭健;陈庆伟;吴晓蓓;胡维礼
【作者单位】南京理工大学,自动化系,江苏,南京,210094;南京理工大学,自动化系,江苏,南京,210094;南京理工大学,自动化系,江苏,南京,210094;南京理工大学,自动化系,江苏,南京,210094
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于神经网络的时滞非线性系统的广义预测控制 [J], 张新良;郭晓迪;朱琳
2.基于T-S模糊模型的非线性系统广义预测控制 [J], 刘石红
3.基于SVM逆系统的非线性系统广义预测控制 [J], 李超峰;卢建刚;孙优贤
4.广义预测控制在非线性系统中的应用研究 [J], 王丽飞;刘洪娥;于佐军
5.基于神经网络预测误差修正的广义预测控制 [J], 庞中华;牛越
因版权原因,仅展示原文概要,查看原文内容请购买。
Bouc-Wen模型和反演装置应用在压电传动装置上来补偿非线性磁滞现象
Bouc-Wen模型和反演装置应用在压电传动装置上来补偿非线性磁滞现象摘要——现在提出一个新的方法用来补偿压电陶瓷材料的非线性磁滞现象。
基于反演预算的方法,该方法避免了反演模型用于现有的问题。
因此,补偿易于实施,只要直接模式是可用,就不需要额外的计算。
该补偿技术,对于Bouc-Wen方程组模拟的磁滞现象很有价值实验人员注意——这些来,许多研究人员正在研究微米/ 纳米级压电晶体的非线性迟滞现象。
尽管高分辨率和高速度的材料的磁滞现象受限于准确性,但是如果反馈控制律可以很轻松地提高性能,它们将应用于微米/纳米级和微小型系统方便传感器。
一方面,准确、高带宽传感器不仅昂贵,而且庞大(仪、光学传感器)。
另一方面,可积传感器对噪音高度敏感,并且易碎(应变片)。
传感器、前馈控制技术已被使用。
这些技术代表了包含在一个整合的观点,但现有的方法很难实现复杂的计算和运行。
在本文中有三个明确的目标:(1)在微米/纳米级实现高性能的需要(2)避免使用庞大的传感器,(3)需要的是易于计算和控制的技术因此本文的内容关键在于设计一种前馈补偿控制器,并且它方便计算和操作。
当然,即使我们提出一个应用对应到具体的压电驱动器,提出的方法同样适用于其他的Bouc-Wen的表达建模系统。
关键词——磁滞现象补偿、Bouc-Wen模型、反演的方案、压电传动装置一介绍压电材料,尤其是PZT材料,在微米/纳米级的发展研究很有价值。
这是由于压电陶瓷提供高分辨率,高带宽,低成本,处理简单所致。
不幸的是,压电陶瓷表现出强烈的非线性磁滞现象,最后不得不妥协制动器的精度并且产生不需要的谐波。
反馈控制技术似乎是最好的方式,它能够触及到整体的实质性东西(准确性、重复性、干扰和不确定性影响振动排斥、拒绝,等等)。
(1)(2)然而,反馈给微小系统,如微米/纳米执行机构受限于传感器难以整合,而高带宽和足够精确的传感器过于庞大,并且很难制作和非常昂贵(干涉仪,三角光传感器、cameramicroscopes测量系统,等等)。
基于Backlash描述函数的神经网络迟滞非线性模型
基于Backlash描述函数的神经网络迟滞非线性模型赵彤;翟亚伟;禹小姣【摘要】Using the real part and imaginary part of the describing function of backlash, a mathematical formula is constructed. Superimposing on a certain number of the formulas, we establish a novel hysteresis nonlinear model. Applying the output of the model as one of the neural network input signal, we create a neural network hysteresis model. The simulation results verify the effectiveness and feasibility of the method.%利用Backlash 描述函数的实部和虚部构造一个函数,将其进行叠加,从而建立了一个新颖的迟滞非线性模型.以所建模型的输出作为神经网络的输入信号之一,建立了一个神经网络迟滞模型.实验结果验证了所提模型的有效性.【期刊名称】《青岛科技大学学报(自然科学版)》【年(卷),期】2012(033)003【总页数】6页(P315-320)【关键词】Backlash描述函数;迟滞非线性;神经网络【作者】赵彤;翟亚伟;禹小姣【作者单位】青岛科技大学自动化与电子工程学院,山东青岛266042;青岛科技大学自动化与电子工程学院,山东青岛266042;青岛科技大学自动化与电子工程学院,山东青岛266042【正文语种】中文【中图分类】N93;TP13在控制系统中,智能材料(压电陶瓷、形状记忆合金等)得到了广泛应用。
但迟滞特性[1]普遍的存在于这些智能材料中,影响了它们的性能。
非线性系统辨识方法综述
非线性系统辨识方法综述系统辨识属于现代控制工程范畴,是以研究建立一个系统的数学模型的技术方法。
分析法和实验法是主要的数学模型建立方法。
系统辨是一种实验建立数学模型的方法,可实时建模,满足不同模型建立的需求。
L.A.Zadeh于1962年提出系统辨识的定义:在输入、输出的基础上,确定一个在一定条件下与所观测系统相等的系统。
系统辨识技术主要由系统的结构辨识和系统的参数估计两部分组成。
系统的数学表达式的形式称之为系统的结构。
对SISO系统而言,系统的阶次为系统的机构;对多变量线性系统而言,模型结构就是系统的能控性结构指数或能观性结构指数。
但实际应用中难以找到与现有系统等价的模型。
因此,系统辨识从实际的角度看是选择一个最好的能拟合实际系统输入输出特性的模型。
本文介绍一些新型的系统辨识方法,体现新型方法的优势,最后得出结论。
二、基于神经网络的非线性系统辨识方法近年来,人工神经网络得到了广泛的应用,尤其是在模式识别、机器学习、智能计算和数据挖掘方面。
人工神经网络具有较好的非线性计算能力、并行计算处理能力和自适应能力,这为非线性系统的辨识提供了新的解决方法。
结合神经网络的系统辨识法被用于各领域的研究,并不断提出改进型方法,取得了较好的进展。
如刘通等人使用了径向基函数神经网络对伺服电机进行了辨识,使用了梯度下降方法进行训练,确定系统参数;张济民等人对摆式列车倾摆控制系统进行了改进,使用BP神经对倾摆控制系统进行辨识;崔文峰等人将最小二乘法与传统人工神经网络结合,改善了移动机器人CyCab的运行系统。
与传统的系统识别方法相比较,人工神经网络具有较多优点:(一)使用神经元之间相连接的权值使得系统的输出可以逐渐进行调整;(二)可以辨识非线性系统,这种辨识方法是络自身来进行,无需编程;(三)无需对系统建行数模,因为神经网络的参数已都反映在内部;(四)神经网络的独立性强,它采用的学习算法是它收敛速度的唯一影响因素;(五)神经网络也适用于在线计算机控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
t i o n .T h e n,h y s t e r e s i s s y s t e m mo d e l o f o n l i n e i d e n t i i f c a t i o n wa s o b t a i n e d b y u s i n g t h e i d e n t i i f c a t i o n t r a n s f e r f u n c t i o n p ra a me t e s r s a i n i t i l a we i g h t v lu a e o f t h e n e u r l a n e t wo r k .F i n ll a y,t h e i n v e r s e mo d e l c o n t r o l s y s t e m o f i d e n t i i f c a t i o n t r a n s f e r f u n c t i o n a n d t h e f e e d - f o r w rd a c o n t r o l l e r w i t h a P I D c o n t r o l e r w e r e e s t a b l i s h e d t o a c h i e v e c o mp e n s a t i n g h y s t e r e s i s n o n l i n e a i r t y o f t h e i d e n t i i f c a t i o n s y s t e ms .T h e r e s u l t s i n d i c a t e t h a t t h e f e a s i b i l i t y o f t h e i d e n t i i f c a t i o n me t h o d a n d t h e e f f e c t i v e n e s s o f c o mp e n s a t i n g c o n t r o l s re a v e if r i e d b y s i mu l a t i o n .
D O I : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1 — 4 5 5 1 . 2 0 1 4 . 0 1 . 0 1 2
迟 滞 非 线 性 系统 辨 识 与 补 偿 控 制 研 究 木
阳 丹, 王 湘江
( 南华 大学 机 械工程 学 院 , 湖南 衡 阳 4 2 1 0 0 1 )
摘要: 针对智能材料 中存在 的迟滞 问题 , 对其开展 了迟滞非线性特 性分析 , 建立 了迟滞 系统 。该迟滞 系统 由两个部分 串联 构成 : 一 部分是 滤去传递函数影响的 P r e i s a c h模型 ; 另一部分是不考虑迟滞影响的系统传递 函数 。将离线 和在线辨识 方法应用 到辨识迟滞 系统中 , 应用最小二乘法离线辨识得 到了辨识传递 函数 参数 , 再用此辨识传递 函数参数作 为神经 网络辨识 的初始 权值 , 得到 了神 经 网络在 线辨识的辨识模型 ; 建立 了辨识传递 函数的逆模 型控制系统和前馈 逆模型 P I D控制 系统 , 并 对辨识 系统进方法 的可行性 和补偿控制 的有效性在仿 真中得 到了验证 。 关键词 : 迟滞系统 ; 离线 辨识 ; 神经 网络辨识 ; 逆模 型 ; 逆模型 P I D
i d e n t i ie f d b y o f l f i n e nd a o li n n e i d e n i t i f c a t i o n me t h o d .F i r s l t y ,t r ns a f e r f u n c i t o n p ra a me t e r s w e r e g o t t e n b y t h e l e st a s q u a r e s o l f l i n e i d e n t i f i c a -
中图分 类号 : T H1 1 3 . 1 ; T P 2 7 3 文献标志码 : A 文章编号 : 1 0 0 1 — 4 5 5 1 ( 2 0 1 4 ) 0 1 — 0 0 5 7— 0 6
I d e n t i ic f a t i o n me t h o d a n d c o mp e n s a t i o n c o n t r o l f o r h y s t e r e t i c n o n l i n e a r s y s t e ms
Y A N G D a n , WA N G X i a n g - j i a n g
( S c h o o l o f Me c h a n i c a l E n g i n e e r i n g , N a n h u a U n i v e r s i t y ,H e n g y a n g 4 2 1 0 0 1 , C h i n a )
Ab s t r a c t :Ai mi n g a t t h e h y s t e r e s i s n o n l i n e a it r y c h a r a c t e r i s t i c s o f s ma r t ma t e ia r ls ,h y s t e r e t i c s y s t e m w a s e s t a b l i s h e d b y a n ly a z i n g t h e h y s t e r e - s i s n o n l i n e a i r t y c h a r a c t e i r s t i c s o f s ma r t ma t e ia r l s .T h i s s y s t e m wa s c o n s i s t e d o f t wo p a r t s i n s e i r e s ,i n c l u d i n g p r e i s a c h mo d e l e l i mi n a t e d t h e i n l f u e n c e o f t r a n s f e r f u n c t i o n,a n d l i n e r a t r ns a f e r f u n c t i o n wi t h o u t c o n s i d e in r g t h e i lu f n e n c e o f h y s t e r e s i s .T h e n,h y s t e r e t i c s y s t e m mo d e l wa s
第3 1卷第 1期
2 0 1 4年 1月
机
电
工
程
V0 l | 3l No . 1
J o u r n a l o f Me c h a n i c l& E a l e c t i r c l a En g i n e e in r g
J a n .2 0 1 4