PLC-外文文献+翻译
自动化制造系统与PLC论文中英文资料外文翻译文献

中英文资料外文翻译文献外文原文Automating Manufacturing Systems with PLCs2.1 INTRODUCTIONControl engineering has evolved over time. In the past humans were the main method for controlling a system. More recently electricity has been used for control and early electrical control was based on relays. These relays allow power to be switched on and off without a mechanical switch. It is common to use relays to make simple logical control decisions. The development of low cost computer has brought the most recent revolution,the Programmable Logic Controller (PLC). The advent of the PLC began in the1970s, and has become the most common choice for manufacturing controls.PLCs have been gaining popularity on the factory floor and will probably remain predominant for some time to come. Most of this is because of the advantages they offer. • Cost effective for controlling complex systems.• Flexible and can be reapplied to control other systems quickly and easily.• Computational abilities allow more sophisticated control.• Tr ouble shooting aids make programming easier and reduce downtime.• Reliable components make these likely to operate for years before failure.2.1.1 Ladder logicLadder logic is the main programming method used for PLCs. As mentioned before, ladder logic has been developed to mimic relay logic. logic diagrams was a strategic one. By selecting ladder logic as the main programming method, the amount of retraining needed forengineers and trades people was greatly reduced.Modern control systems still include relays, but these are rarely used for logic. A relay is a simple device that uses a magnetic field to control a switch, as pictured in Figure 2.1. When a voltage is applied to the input coil, the resulting current creates a magnetic field. The magnetic field pulls a metal switch (or reed) towards it and the contacts touch, closing the switch. The contact that closes when the coil is energized is called normally open. The normally closed contacts touch when the input coil is not energized. Relays are normally drawn in schematic form using a circle to represent the input coil. The output contacts are shown with two parallel lines. Normally open contacts are shown as two lines, and will be open (non-conducting) when the input is not energized. Normally closed contacts are shown with two lines with a diagonal line through them. When the input coil is not energized the normally closed contacts will be closed (conducting).Figure 2.1 Simple Relay Layouts and SchematicsRelays are used to let one power source close a switch for another (often high current) power source, while keeping them isolated. An example of a relay in a simple control application is shown in Figure 2.2. In this system the first relay on the left is used as normally closed, and will allow current to flow until a voltage is applied to the input A. The second relay is normally open and will not allow current to flow until a voltage is applied to the input B. If current is flowing through the first two relays then current will flow through the coil in the third relay, and close the switch for output C. This circuit would normally be drawn in the ladder logic form. This can be read logically as C will be on if A is off and B is on.Figure 2.2 A Simple Relay ControllerThe example in Figure 2.2 does not show the entire control system, but only the logic. When we consider a PLC there are inputs, outputs, and the logic. Figure 2.3 shows a more complete representation of the PLC. Here there are two inputs from push buttons.We can imagine the inputs as activating 24V DC relay coils in the PLC. This in turn drives an output relay that switches 115V AC, that will turn on a light. Note, in actual PLCs inputs are never relays, but outputs are often relays. The ladder logic in the PLC is actually a computer program that the user can enter and change. Notice that both of the input push buttons are normally open, but the ladder logic inside the PLC has one normally open contact, and one normally closed contact. Do not think that the ladder logic in the PLC need so match the inputs or outputs. Many beginners will get caught trying to make the ladder logic match the input types.Figure 2.3 A PLC Illustrated With RelaysMany relays also have multiple outputs (throws) and this allows an output relay to also be an input simultaneously. The circuit shown in Figure 1.4 is an example of this, it is called a seal in circuit. In this circuit the current can flow through either branch of the circuit, through the contacts labelled A or B. The input B will only be on when the output B is on. If B is off, and A is energized, then B will turn on. If B turns on then the input B will turn on, and keep output B on even if input A goes off. After B is turned on the output B will not turn off.Figure 2.4 A Seal-in Circuit2.1.2 ProgrammingThe first PLCs were programmed with a technique that was based on relay logic wiring schematics. This eliminated the need to teach the electricians, technicians and engineers how to program a computer - but, this method has stuck and it is the most common technique for programming PLCs today. An example of ladder logic can be seen in Figure 2.5. To interpret this diagram imagine that the power is on the vertical line on the left hand side, we call this the hot rail. On the right hand side is the neutral rail. In the figure there are two rungs, and on each rung there are combinations of inputs (two vertical lines) and outputs (circles). If the inputs are opened or closed in the right combination the power can flow from the hot rail, through the inputs, to power the outputs, and finally to the neutral rail. An input can come from a sensor, switch, or any other type of sensor. An output will be some device outside the PLC that is switched on or off, such as lights or motors. In the top rung the contacts are normally open and normally closed. Which means if input A is on and input B is off, then power will flow through the output and activate it. Any other combination of input values will result in the output X being off.Figure 2.5 A Simple Ladder Logic DiagramThe second rung of Figure 2.5 is more complex, there are actually multiple combinations of inputs that will result in the output Y turning on. On the left most part of the rung, power could flow through the top if C is off and D is on. Power could also (and simultaneously) flow through the bottom if both E and F are true. This would get power half way across the rung, and then if G or H is true the power will be delivered to output Y. In later chapters we will examine how to interpret and construct these diagrams.There are other methods for programming PLCs. One of the earliest techniques involved mnemonic instructions. These instructions can be derived directly from the ladderlogic diagrams and entered into the PLC through a simple programming terminal. An example of mnemonics is shown in Figure 2.6. In this example the instructions are read one line at a time from top to bottom. The first line 00000 has the instruction LDN (input load and not) for input A. . This will examine the input to the PLC and if it is off it will remember a 1 (or true), if it is on it will remember a 0 (or false). The next line uses an LD (input load) statement to look at the input. If the input is off it remembers a 0, if the input is on it remembers a 1 (note: this is the reverse of the LD). The AND statement recalls the last two numbers remembered and if the are both true the result is a 1, otherwise the result is a 0. This result now replaces the two numbers that were recalled, and there is only one number remembered. The process is repeated for lines 00003 and 00004, but when these are done there are now three numbers remembered. The oldest number is from the AND, the newer numbers are from the two LD instructions. The AND in line 00005 combines the results from the last LD instructions and now there are two numbers remembered. The OR instruction takes the two numbers now remaining and if either one is a 1 the result is a 1, otherwise the result is a 0. This result replaces the two numbers, and there is now a single number there. The last instruction is the ST (store output) that will look at the last value stored and if it is 1, the output will be turned on, if it is 0 the output will be turned off.Figure 2.6 An Example of a Mnemonic Program and Equivalent Ladder LogicThe ladder logic program in Figure 2.6, is equivalent to the mnemonic program. Even ifyou have programmed a PLC with ladder logic, it will be converted to mnemonic form before being used by the PLC. In the past mnemonic programming was the most common, but now it is uncommon for users to even see mnemonic programs.Sequential Function Charts (SFCs) have been developed to accommodate the programming of more advanced systems. These are similar to flowcharts, but much more powerful. The example seen in Figure 2.7 is doing two different things. To read the chart, start at the top where is says start. Below this there is the double horizontal line that says follow both paths. As a result the PLC will start to follow the branch on the left and right hand sides separately and simultaneously. On the left there are two functions the first one is the power up function. This function will run until it decides it is done, and the power down function will come after. On the right hand side is the flash function, this will run until it is done. These functions look unexplained, but each function, such as power up will be a small ladder logic program. This method is much different from flowcharts because it does not have to follow a single path through the flowchart..Figure 2.7 An Example of a Sequential Function CharStructured Text programming has been developed as a more modern programming language. It is quite similar to languages such as BASIC. A simple example is shown in Figure 2.8. This example uses a PLC memory location i. This memory location is for an integer, as will be explained later in the book. The first line of the program sets the value to 0. The next line begins a loop, and will be where the loop returns to. The next line recalls thevalue in location i, adds 1 to it and returns it to the same location. The next line checks to see if the loop should quit. If i is greater than or equal to 10, then the loop will quit, otherwise the computer will go back up to the REPEAT statement continue from there. Each time the program goes through this loop i will increase by 1 until the value reaches 10.Figure 2.8 An Example of a Structured Text Program2.1.3 PLC ConnectionsWhen a process is controlled by a PLC it uses inputs from sensors to make decisions and update outputs to drive actuators, as shown in Figure 2.9. The process is a real process that will change over time. Actuators will drive the system to new states (or modes of operation). This means that the controller is limited by the sensors available, if an input is not available, the controller will have no way to detect a condition.Figure 2.9 The Separation of Controller and ProcessThe control loop is a continuous cycle of the PLC reading inputs, solving the ladder logic, and then changing the outputs. Like any computer this does not happen instantly. Figure 2.10 shows the basic operation cycle of a PLC. When power is turned on initially the PLC does a quick sanity check to ensure that the hardware is working properly.If there is a problem the PLC will halt and indicate there is an error. For example, if the PLC power is dropping andabout to go off this will result in one type of fault. If the PLC passes the sanity check it will then scan (read) all the inputs. After the inputs values are stored in memory the ladder logic will be scanned (solved) using the stored values not the current values. This is done to prevent logic problems when inputs change during the ladder logic scan. When the ladder logic scan is complete the outputs will be scanned (the output values will be changed). After this the system goes back to do a sanity check, and the loop continues indefinitely. Unlike normal computers, the entire program will be run every scan. Typical times for each of the stages is in the order of milliseconds.Figure 2.10 The Scan Cycle of a PLC2.1.4 Ladder Logic InputsPLC inputs are easily represented in ladder logic. In Figure 2.11 there are three types of inputs shown. The first two are normally open and normally closed inputs, discussed previously. The IIT (Immediate InpuT) function allows inputs to be read after the input scan, while the ladder logic is being scanned. This allows ladder logic to examine input values more often than once every cycle.Figure 2.11 Ladder Logic Inputs2.1.5 Ladder Logic OutputsIn ladder logic there are multiple types of outputs, but these are not consistently available on all PLCs. Some of the outputs will be externally connected to devices outside the PLC, but it is also possible to use internal memory locations in the PLC. Six types of outputs are shown in Figure 2.12. The first is a normal output, when energized the output will turn on, and energize an output. The circle with a diagonal line through is a normally on output. When energized the output will turn off. This type of output is not available on all PLC types. When initially energized the OSR (One Shot Relay) instruction will turn on for one scan, but then be off for all scans after, until it is turned off. The L (latch) and U (unlatch) instructions can be used to lock outputs on. When an L output is energized the output will turn on indefinitely, even when the output coil is deenergized. The output can only be turned off using a U output. The last instruction is the IOT (Immediate OutpuT) The last instruction is the IOT (Immediate OutpuT)that will allow outputs to be updated without having to wait for the ladder logic scan to be completed.3.1 INPUTS AND OUTPUTSInputs to, and outputs from, a PLC are necessary to monitor and control a process. Both inputs and outputs can be categorized into two basic types: logical or continuous. Considerthe example of a light bulb. If it can only be turned on or off, it is logical control. If the light can be dimmed to different levels, it is continuous. Continuous values seem more intuitive, but logical values are preferred because they allow more certainty, and simplify control. As a result most controls applications (and PLCs) use logical inputs and outputs for most applications. Hence, we will discuss logical I/O and leave continuous I/O for later.Outputs to actuators allow a PLC to cause something to happen in a process. A short list of popular actuators is given below in order of relative popularity.Solenoid Valves - logical outputs that can switch a hydraulic or pneumatic flow. Lights - logical outputs that can often be powered directly from PLC output boards.Motor Starters - motors often draw a large amount of current when started, so they require motor starters, which are basically large relays.Servo Motors - a continuous output from the PLC can command a variable speed or position.Outputs from PLCs are often relays, but they can also be solid state electronics such as transistors for DC outputs or Triacs for AC outputs. Continuous outputs require special output cards with digital to analog converters.Inputs come from sensors that translate physical phenomena into electrical signals. Typical examples of sensors are listed below in relative order of popularity.Proximity Switches - use inductance, capacitance or light to detect an object logically. Switches - mechanical mechanisms will open or close electrical contacts for a logical signal. Potentiometer - measures angular positions continuously, using resistance.LVDT (linear variable differential transformer) - measures linear displacement continuously using magnetic coupling.Inputs for a PLC come in a few basic varieties, the simplest are AC and DC inputs. Sourcing and sinking inputs are also popular. This output method dictates that a device does not supply any power. Instead, the device only switches current on or off, like a simple switch. Sinking - When active the output allows current to flow to a common ground. This is best selected when different voltages are supplied. Sourcing - When active, current flows from asupply, through the output device and to ground. This method is best used when all devices use a single supply voltage. This is also referred to as NPN (sinking) and PNP (sourcing). PNP is more popular. This will be covered in detail in the chapter on sensors.3.1.1 InputsIn smaller PLCs the inputs are normally built in and are specified when purchasing the PLC. For larger PLCs the inputs are purchased as modules, or cards, with 8 or 16 inputs of the same type on each card. For discussion purposes we will discuss all inputs as if they have been purchased as cards. The list below shows typical ranges for input voltages, and is roughly in order of popularity. PLC input cards rarely supply power, this means that an external power supply is needed to supply power for the inputs and sensors. The example in Figure 3.1 shows how to connect an AC input card.Figure 3.1 An AC Input Card and Ladder LogicIn the example there are two inputs, one is a normally open push button, and the second is a temperature switch, or thermal relay. (NOTE: These symbols are standard and will be discussed later in this chapter.) Both of the switches are powered by the positive/ hot output ofthe 24Vac power supply - this is like the positive terminal on a DC supply. Power is supplied to the left side of both of the switches. When the switches are open there is no voltage passed to the input card. If either of the switches are closed power will be supplied to the input card. In this case inputs 1 and 3 are used - notice that the inputs start at 0. The input card compares these voltages to the common. If the input voltage is within a given tolerance range the inputs will switch on. Ladder logic is shown in the figure for the inputs. Here it uses Allen Bradley notation for PLC-5 racks. At the top is the location of the input card I:013 which indicates that the card is an Input card in rack 01 in slot 3. The input number on the card is shown below the contact as 01 and 03.Many beginners become confused about where connections are needed in the circuit above. The key word to remember is circuit, which means that there is a full loop that the voltage must be able to follow. In Figure 3.1 we can start following the circuit (loop) at the power supply. The path goes through the switches, through the input card, and back to the power supply where it flows back through to the start. In a full PLC implementation there will be many circuits that must each be complete. A second important concept is the common. Here the neutral on the power supply is the common, or reference voltage. In effect we have chosen this to be our 0V reference, and all other voltages are measured relative to it. If we had a second power supply, we would also need to connect the neutral so that both neutrals would be connected to the same common. Often common and ground will be confused. The common is a reference, or datum voltage that is used for 0V, but the ground is used to prevent shocks and damage to equipment. The ground is connected under a building to a metal pipe or grid in the ground. This is connected to the electrical system of a building, to the power outlets, where the metal cases of electrical equipment are connected. When power flows through the ground it is bad. Unfortunately many engineers, and manufacturers mix up ground and common. It is very common to find a power supply with the ground and common mislabeled.One final concept that tends to trap beginners is that each input card is isolated. This means that if you have connected a common to only one card, then the other cards are not connected. When this happens the other cards will not work properly. You must connect acommon for each of the output cards.3.1.2.Output ModulesAs with input modules, output modules rarely supply any power, but instead act as switches. External power supplies are connected to the output card and the card will switch the power on or off for each output. Typical output voltages are listed below, and roughly ordered by popularity.120 Vac24 Vdc12-48 Vac12-48 Vdc5Vdc (TTL)230 VacThese cards typically have 8 to 16 outputs of the same type and can be purchased with different current ratings. A common choice when purchasing output cards is relays, transistors or triacs. Relays are the most flexible output devices. They are capable of switching both AC and DC outputs. But, they are slower (about 10ms switching is typical), they are bulkier, they cost more, and they will wear out after millions of cycles. Relay outputs are often called dry contacts. Transistors are limited to DC outputs, and Triacs are limited to AC outputs. Transistor and triac outputs are called switched outputs. Dry contacts - a separate relay is dedicated to each output.This allows mixed voltages (AC or DC and voltage levels up to the maximum), as well as isolated outputs to protect other outputs and the PLC. Response times are often greater than 10ms. This method is the least sensitive to voltage variations and spikes. Switched outputs - a voltage is supplied to the PLC card, and the card switches it to different outputs using solid state circuitry (transistors, triacs, etc.) Triacs are well suited to AC devices requiring less than 1A. Transistor outputs use NPN or PNP transistors up to 1A typically. Their response time is well under 1ms.中文翻译自动化制造系统与PLC2.1介绍控制工程随着时间的推移在不断发展。
关于PLC外文文献翻译
关于PLC外文文献翻译外文文献翻译2014年6月designate a person responsible for periodically repaired, if significant quality problems, whether it's design or construction reasons, are required at the first meeting to study and propose solutions; 5) post through re-examination on the basis to resolve all remaining issues, well prepared for formal acceptance. 9, officially accepted: 1) the letter of acceptance issued by the Chief Engineer, project manager, and submitted it to the construction completion data; 2) by the employer organization design, supervision and quality supervision stations, construction and other construction units work together to check the quality and acceptance of views put forward, assessed quality rating; 3) Unit checked and confirmed after the completion of works comply with the standards and requirements, issue a certificate of completion to the construction unit, construction and design, quality supervision station, the engineer, civil engineering and other units to sign the certificates of completion; 4) signed a final acceptance certificate and construction unit, and according to the contract provisions of settlement procedures, unless indicated in the contract by the contractor of the warranty work, economic and legal responsibilities of each party are able to remove; 5) get the files transfer and project procedures. 10 quality tracking, maintenance plan is an important partof our quality assurance system, the company sold products and installation works are carried out by the after-sales service obligations. In particular, we developed a departmental duties and quality guarantee measures, as follows: 1) visited customers and product usage information. 2) collect customer feedback, product information, customer reports, complaints. 3) based on customer comments and respond promptly to complaints, to the site to identify the cause analysis, engineering quality problems and fill in the data form. 4) record type, the location, cause, and complete solutions. 5) identify reasons to propose solutions and,Understanding the Basics of S7-200 Network Communications Selecting the Communication Interface for Your NetworkThe S7-200 is designed to solve your communications and networking needs by supporting not only the simplest of networks but also supporting more complex networks. The S7-200 also provides tools that allow you to communicate with other devices, such as printers and weigh scales which use their owncommunications protocols.The S7-200 supports many different types of communication networks. The selection of a network isperformed within the Set PG/PC Interface property dialog. A selected network is referred to as an Interface. The different types of interfaces available to access these communication networks are:1. PPI Multi-Master cables2. CP communication cards3. Ethernet communication cardsTo select the communication interface for STEP 7--Micro/WIN, you perform the following steps. See Figure 7-1.1. Double-click the icon in the Communications Setup window.2. Select the interface parameter fo12Figure 7-1 STEP 7--Micro/WINCommunications Interface第 0 页共 2 页PPI Multi-Master CablesThe S7-200 supports communication through two different types of PPI Multi-Master cables. These cable types permit communication through either an RS-232 or a USB interface.As shown in Figure 7-2, selecting the PPI Multi-Master cable type is simple. You perform the following steps:1. Click the Properties button on the Set PG/PC Interface property page.2. Click the Local Connection tab on the Properties page.3. Select the USB or the desired COM port123Figure 7-2 PPI Multi-Master Cable SelectionTipPlease note that only one USB cable can be used at a time.TipExamples in this manual use the RS-232/PPI Multi-Master cable. TheRS-232/PPI Multi-Master cable replaces the previous PC/PPI cable. AUSB/PPI Multi-Master cable is also available. Refer to Appendix E for order numbers. Using Master and Slave Devices on a PROFIBUS Network The S7-200 supports a master-slave network and can function aseither a master or a slave in a PROFIBUS network, while STEP 7--Micro/WIN is always a master.第 1 页共 3 页MastersA device that is a master on a network can initiate a request to another device on the network. A master can also respond to requestsfrom other masters on the network. Typical master devices include STEP7--Micro/WIN, human-machine interface devices such as a TD 200, and S7-300 or S7-400 PLCs. The S7-200 functions as a master when it isrequesting information from another S7-200 (peer-to-peer communications).TipA TP070 will not work on a network with another master device.SlavesA device that is configured as a slave can only respond to requests from a master device; a slave never initiates a request. For most networks, the S7-200 functions as a slave. As a slave device, the S7-200responds to requests from a network master device, such as an operator panel or STEP 7--Micro/WIN.Setting the Baud Rate and Network AddressThe speed that data is transmitted across the network is the baud rate, which is typically measured in units of kilobaud (kbaud) or megabaud (Mbaud). The baud rate measures how much data can betransmitted within a given amount of time. For example, a baud rate of 19.2 kbaud describes a transmission rate of 19,200 bits per second.Every device that communicates over a given network must beconfigured to transmit data at the same baud rate. Therefore, thefastest baud rate for the network is determined by the slowest device connected to the network.Table 7-1 lists the baud rates supported by the S7-200.Table 7-1 Baud Rates Supported by the S7-200Network Baud RateStandard Network 9.6 kbaud to 187.5 kbauddesignate a person responsible for periodically repaired, if significant quality problems, whether it's design or construction reasons, are required at the first meeting to study and propose solutions; 5) post through re-examination on the basis to resolve all remaining issues, well prepared for formal acceptance. 9, officially accepted: 1) the letter of acceptance issued by the Chief Engineer, project manager, and submitted it to the construction completion data; 2) by the employer organization design, supervision and quality supervisionstations, construction and other construction units work together to check the quality and acceptance of views put forward, assessed quality rating; 3) Unit checked and confirmed after the completion of works comply with the standards and requirements, issue a certificate of completion to the construction unit, construction and design, quality supervision station, the engineer, civil engineering and other units to sign the certificates of completion; 4) signed a final acceptance certificate and construction unit, and according to the contract provisions of settlement procedures, unless indicated in the contract by the contractor of the warranty work, economic and legal responsibilities of each party are able to remove; 5) get the files transfer and project procedures. 10 quality tracking, maintenance plan is an important part of our quality assurance system, the company sold products and installation works are carried out by the after-sales service obligations. In particular, we developed a departmental duties and quality guarantee measures, as follows: 1) visited customers and product usage information. 2) collect customer feedback, product information, customer reports, complaints. 3) based on customer comments and respond promptly to complaints, to the site to identify the cause analysis, engineering quality problems and fill in the data form. 4) record type, the location, cause, and complete solutions. 5) identify reasons to propose solutions and,Using an EM 277 9.6 kbaud to 12 MbaudFreeport Mode 1200 baud to 115.2 kbaudThe network address is a unique number that you assign to each device on the network. The unique network address ensures that the data is transferred to or retrieved from the correct device. The S7-200 supports network addresses from 0 to 126. For an S7-200 with two ports, each port has a network address. Table 7-2 lists the default (factory) settings for the S7-200 devices.Table 7-2 Default Addresses for S7-200 DevicesS7-200 Device Default AddressSTEP 7--Micro/WIN 0HMI (TD 200, TP, or OP) 1S7-200 CPU 2Setting the Baud Rate and Network Address for STEP7--Micro/WINYou must configure the baud rate and network address for STEP 7--Micro/WIN. The baud rate must be the same as the other devices on the network, and the network address must be unique.Typically, you do not change the network address (0) for STEP 7--Micro/WIN. If your network includes another programming package, you might need to change the network address for STEP 7--Micro/WIN.As shown in Figure 7-3, configuring the baud rate and network address for STEP 7--Micro/WIN is simple. After you click the Communications icon in the Navigation bar, you perform the following steps:第 3 页共 5 页\ 1234Figure 7-3 Configuring STEP 7--Micro/WINFigure 7-3 Configuring STEP 7--Micro/WIN1. Double-click the icon in the Communications Setup window.2. Click the Properties button on the Set PG/PC Interface dialog box.3. Select the network address for STEP 7--Micro/WIN.4. Select the baud rate for STEP 7--Micro/WIN.Setting the Baud Rate and Network Address for the S7-200You must also configure the baud rate and network address for theS7-200. The system block of the S7-200 stores the baud rate and network address. After you select the parameters for the S7-200, you must download the system block to the S7-200.The default baud rate for each S7-200 port is 9.6 kbaud, and thedefault network address is 2.As shown in Figure 7-4, use STEP 7--Micro/WIN to set the baud rateand network address for the S7-200. After you select the System Blockicon in the Navigation bar or select the View > Component > System Block menu command, you perform the following steps:1. Select the network address for the S7-200.2. Select the baud rate for the S7-200.designate a person responsible for periodically repaired, ifsignificant quality problems, whether it's design or construction reasons, are required at the first meeting to study and proposesolutions; 5) post through re-examination on the basis to resolve all remaining issues, well prepared for formal acceptance. 9, officiallyaccepted: 1) the letter of acceptance issued by the Chief Engineer, project manager, and submitted it to the construction completion data; 2) by the employer organization design, supervision and quality supervision stations, construction and other construction units work together to check the quality and acceptance of views put forward, assessed quality rating; 3) Unit checked and confirmed after the completion of works comply with the standards and requirements, issue a certificate of completion to the construction unit, construction and design, quality supervision station, the engineer, civil engineering and other units to sign the certificates of completion; 4) signed a final acceptance certificate and construction unit, and according to the contract provisions of settlement procedures, unless indicated in the contract by the contractor of the warranty work, economic and legal responsibilities of each party are able to remove; 5) get the files transfer and project procedures. 10 quality tracking, maintenance plan is an important partof our quality assurance system, the company sold products andinstallation works are carried out by the after-sales service obligations. In particular, we developed a departmental duties andquality guarantee measures, as follows: 1) visited customers and product usage information. 2) collect customer feedback, product information, customer reports, complaints. 3) based on customer comments and respond promptly to complaints, to the site to identify the cause analysis, engineering quality problems and fill in the data form. 4) record type,the location, cause, and complete solutions. 5) identify reasons to propose solutions and,3. Download the system block to the S7-200.12Figure 7-4 Configuring the S7-200 CPUTipSelection of all baud rate options is permitted. STEP 7--Micro/WIN validates this selection during the download of the System Block. Baud rate selections that would prevent STEP 7--Micro/WIN from communicating with the S7-200 are prevented from being downloaded.Setting the Remote AddressBefore you can download the updated settings to the S7-200, you must set both the communications (COM) port of STEP 7--Micro/WIN (local) and the address of the S7-200 (remote) to match the current setting of the remote S7-200. See Figure 7-5.After you download the updated settings, you may need to reconfigure the PG/PC Interface baud rate setting (if different from the setting used when downloading to the remote S7-200). Refer to Figure 7-3 to configure the baud rate.第 5 页共 7 页Figure 7-5 Configuring STEP 7--Micro/WINSearching for the S7-200 CPUs on a NetworkYou can search for and identify the S7-200 CPUs that are attached to your network. You can also search the network at a specific baud rate or at all baud rates when looking for S7-200s.Only PPI Multi-Master cables permit searching of all baud rates.This feature is not available if communicating through a CP card. The search starts at the baud rate that is currently selected.1. Open the Communications dialog box and double-click the Refresh icon to start the search.2. To search all baud rates, select the Search All Baud Rates check box. 2.Selecting the Communications Protocol for Your NetworkThe following information is an overview of the protocols supportedby the S7-200 CPUs.1. Point-to-Point Interface (PPI)2. Multi-Point Interface (MPI)3. PROFIBUSFigure 7-6 Searching for CPUs on a Networkdesignate a person responsible for periodically repaired, if significant quality problems, whether it's design or construction reasons, are required at the first meeting to study and propose solutions; 5) post through re-examination on the basis to resolve all remaining issues, well prepared for formal acceptance. 9, officially accepted: 1) the letter of acceptance issued by the Chief Engineer, project manager, and submitted it to the construction completion data; 2) by the employer organization design, supervision and quality supervision stations, construction and other construction units work together to check the quality and acceptance of views put forward, assessed qualityrating; 3) Unit checked and confirmed after the completion of works comply with the standards and requirements, issue a certificate of completion to the construction unit, construction and design, quality supervision station, the engineer, civil engineering and other units to sign the certificates of completion; 4) signed a final acceptance certificate and construction unit, and according to the contract provisions of settlement procedures, unless indicated in the contract by the contractor of the warranty work, economic and legal responsibilities of each party are able to remove; 5) get the files transfer and project procedures. 10 quality tracking, maintenance plan is an important part of our quality assurance system, the company sold products and installation works are carried out by the after-sales service obligations. In particular, we developed a departmental duties and quality guarantee measures, as follows: 1) visited customers and product usage information. 2) collect customer feedback, product information, customer reports, complaints. 3) based on customer comments and respond promptly to complaints, to the site to identify the cause analysis, engineering quality problems and fill in the data form. 4) record type, the location, cause, and complete solutions. 5) identify reasons to propose solutions and,Based on the Open System Interconnection (OSI) seven-layer model of communications architecture, these protocols are implemented on a token ring network which conforms to the PROFIBUS standard as defined in the European Standard EN 50170. These protocols are asynchronous, character-based protocols with one start bit, eight data bits, even parity, and one stop bit. Communications frames depend upon special start and stop characters, source and destination station addresses, frame length, and a checksum for data integrity. The protocols can run on a network simultaneously without interfering with each other, as long as the baud rate is the same for each protocol.Ethernet is also available for the S7-200 CPU with expansion modules CP243--1 and CP243--1 IT.PPI ProtocolPPI is a master-slave protocol: the master devices send requests to the slave devices, and the slave devices respond. See Figure 7-7. Slave devices do not initiate messages, but wait until a master sends them a request or polls them for a response.Masters communicate to slaves by means of a shared connection which is managed by the PPI protocol. PPI does not limit the number of masters that can communicate with any one slave; however, you cannot install more than 32 masters on the network.Figure 7-7 PPI NetworkS7-200 CPUs can act as master devices while they are in RUN mode, if you enable PPI master mode in the user program. (See the description of SMB30 in Appendix D.) After enabling PPI master mode, you can use the Network Read or the Network Write instructions to read from or write to other S7-200s.While the S7-200 is acting as a PPI master, it still responds as a slave to requests from other masters.第 7 页共 9 页PPI Advanced allows network devices to establish a logical connection between the devices. With PPI Advanced, there are a limited number of connections supplied by each device. See Table 7-3 for the number of connections supported by the S7-200.All S7-200 CPUs support both PPI and PPI Advanced protocols, while PPI Advanced is the only PPI protocol supported by the EM 277 module.Table 7-3 Number of Connections for the S7-200 CPU and EM 277 ModulesModule Baud Rate ConnectionsS7-200 CPU Port 0 9.6 kbaud, 19.2 kbaud, or 187.5 kbaud 4Port 1 9.6 kbaud, 19.2 kbaud, or 187.5 kbaud 4EM 277 Module 9.6 kbaud to 12 Mbaud 6 per moduleMPI ProtocolMPI allows both master-master and master-slave communications. See Figure 7-8. To communicate with an S7-200 CPU, STEP 7--Micro/WINestablishes a master--slave connection. MPI protocol does not communicate with an S7-200 CPU operating as a master.Network devices communicate by means of separate connections (managed by the MPI protocol) between any two devices. Communication between devices is limited to the number of connections supported by the S7-200 CPU or EM 277 modules. See Table 7-3 for the number of connections supported by the S7-200.For MPI protocol, the S7-300 and S7-400 PLCs use the XGET and XPUT instructions to read and write data to the S7-200 CPU. For information about these instructions, refer to your S7-300 or S7-400 programming manual.Figure 7-8 MPI Networkdesignate a person responsible for periodically repaired, if significant quality problems, whether it's design or construction reasons, are required at the first meeting to study and propose solutions; 5) post through re-examination on the basis to resolve all remaining issues, well prepared for formal acceptance. 9, officiallyaccepted: 1) the letter of acceptance issued by the Chief Engineer, project manager, and submitted it to the construction completion data; 2) by the employer organization design, supervision and quality supervision stations, construction and other construction units work together to check the quality and acceptance of views put forward, assessed quality rating; 3) Unit checked and confirmed after the completion of works comply with the standards and requirements, issue a certificate of completion to the construction unit, construction and design, quality supervision station, the engineer, civil engineering and other units to sign the certificates of completion; 4) signed a final acceptance certificate and construction unit, and according to the contract provisions of settlement procedures, unless indicated in the contract by the contractor of the warranty work, economic and legal responsibilities of each party are able to remove; 5) get the files transfer and project procedures. 10 quality tracking, maintenance plan is an important partof our quality assurance system, the company sold products andinstallation works are carried out by the after-sales service obligations. In particular, we developed a departmental duties andquality guarantee measures, as follows: 1) visited customers and product usage information. 2) collect customer feedback, product information, customer reports, complaints. 3) based on customer comments and respond promptly to complaints, to the site to identify the cause analysis, engineering quality problems and fill in the data form. 4) record type,the location, cause, and complete solutions. 5) identify reasons to propose solutions and,PROFIBUS ProtocolThe PROFIBUS protocol is designed for high-speed communications with distributed I/O devices (remote I/O). There are many PROFIBUS devices available from a variety of manufacturers. These devices range from simple input or output modules to motor controllers and PLCs.PROFIBUS networks typically have one master and several slave I/O devices. See Figure 7-9. The master device is configured to know what types of I/O slaves are connected and at what addresses. The master initializes the network and verifies that the slave devices on the network match the configuration. The master continuously writes output data to the slaves and reads input data from them.Figure 7-9 PROFIBUS NetworkWhen a DP master configures a slave device successfully, it then owns that slave device. If there is a second master device on thenetwork, it has very limited access to the slaves owned by the first master.TCP/IP ProtocolThe S7-200 can support TCP/IP Ethernet communication through the use of an Ethernet (CP 243--1) orInternet (CP 243--1 IT) expansion module. Table 7-4 shows the baud rate and number of connections supported by these modules. Table 7-4 Number of Connections for the Ethernet (CP 243--1) and the Internet (CP 243--1 IT)ModulesModule Baud Rate ConnectionsEthernet (CP 243--1) Module 10 to 100 Mbaud 8 general purpose connections第 9 页共 11 页1 STEP 7--Micro/WINInternet (CP 243--1 IT) ModuleconnectionRefer to the CP 243--1 Communications Processor for Industrial EthernetManual or the CP 243--1 IT Communications Processor for Industrial Ethernet andInformation Technology Manual for additional information.designate a person responsible for periodically repaired, if significant quality problems, whether it's design or construction reasons, are required at the first meeting to study and proposesolutions; 5) post through re-examination on the basis to resolve all remaining issues, well prepared for formal acceptance. 9, officially accepted: 1) the letter of acceptance issued by the Chief Engineer, project manager, and submitted it to the construction completion data; 2) by the employer organization design, supervision and quality supervision stations, construction and other construction units work together to check the quality and acceptance of views put forward, assessed quality rating; 3) Unit checked and confirmed after the completion of works comply with the standards and requirements, issue a certificate of completion to the construction unit, construction and design, quality supervision station, the engineer, civil engineering and other units to sign the certificates of completion; 4) signed a final acceptance certificate and construction unit, and according to the contract provisions of settlement procedures, unless indicated in the contract by the contractor of the warranty work, economic and legal responsibilities of each party are able to remove; 5) get the files transfer and project procedures. 10 quality tracking, maintenance plan is an important partof our quality assurance system, the company sold products andinstallation works are carried out by the after-sales service obligations. In particular, we developed a departmental duties andquality guarantee measures, as follows: 1) visited customers and product usage information. 2) collect customer feedback, product information, customer reports, complaints. 3) based on customer comments and respond promptly to complaints, to the site to identify the cause analysis,engineering quality problems and fill in the data form. 4) record type, the location, cause, and complete solutions. 5) identify reasons to propose solutions and,中文翻译理解S7--200网络通讯的基本概念为网络选择通讯接口S7--200可以满足您的通讯和网络需求,它不仅支持简单的网络,而且支持比较复杂的网络。
PLC-外文文献+翻译

Programmable logic controllerA programmable logic controller(PLC)or programmable controller is a digital computer used for automation of electromechanical processes,such as control of machinery on factory assembly lines,amusement rides,or lighting fixtures.PLCs are used in many industries and machines.Unlike general-purpose computers,the PLC is designed for multiple inputs and output arrangements,extended temperature ranges, immunity to electrical noise,and resistance to vibration and impact.Programs to control machine operation are typically stored in battery-backed or non-volatile memory.A PLC is an example of a real time system since output results must be produced in response to input conditions within a bounded time,otherwise unintended operation will result.1.HistoryThe PLC was invented in response to the needs of the American automotive manufacturing industry.Programmable logic controllers were initially adopted by the automotive industry where software revision replaced the re-wiring of hard-wired control panels when production models changed.Before the PLC,control,sequencing,and safety interlock logic for manufacturing automobiles was accomplished using hundreds or thousands of relays,cam timers, and drum sequencers and dedicated closed-loop controllers.The process for updating such facilities for the yearly model change-over was very time consuming and expensive,as electricians needed to individually rewire each and every relay.In1968GM Hydramatic(the automatic transmission division of General Motors) issued a request for proposal for an electronic replacement for hard-wired relay systems.The winning proposal came from Bedford Associates of Bedford, Massachusetts.The first PLC,designated the084because it was Bedford Associates' eighty-fourth project,was the result.Bedford Associates started a new company dedicated to developing,manufacturing,selling,and servicing this new product: Modicon,which stood for MOdular DIgital CONtroller.One of the people who worked on that project was Dick Morley,who is considered to be the"father"of the PLC.The Modicon brand was sold in1977to Gould Electronics,and later acquired by German Company AEG and then by French Schneider Electric,the current owner. One of the very first084models built is now on display at Modicon's headquarters in North Andover,Massachusetts.It was presented to Modicon by GM,when the unit was retired after nearly twenty years of uninterrupted service.Modicon used the84moniker at the end of its product range until the984made its appearance.The automotive industry is still one of the largest users of PLCs.2.DevelopmentEarly PLCs were designed to replace relay logic systems.These PLCs were programmed in"ladder logic",which strongly resembles a schematic diagram of relay logic.This program notation was chosen to reduce training demands for the existing technicians.Other early PLCs used a form of instruction list programming,based on a stack-based logic solver.Modern PLCs can be programmed in a variety of ways,from ladder logic to more traditional programming languages such as BASIC and C.Another method is State Logic,a very high-level programming language designed to program PLCs based on state transition diagrams.Many early PLCs did not have accompanying programming terminals that were capable of graphical representation of the logic,and so the logic was instead represented as a series of logic expressions in some version of Boolean format,similar to Boolean algebra.As programming terminals evolved,it became more common for ladder logic to be used,for the aforementioned reasons.Newer formats such as State Logic and Function Block(which is similar to the way logic is depicted when using digital integrated logic circuits)exist,but they are still not as popular as ladder logic.A primary reason for this is that PLCs solve the logic in a predictable and repeating sequence,and ladder logic allows the programmer(the person writing the logic)to see any issues with the timing of the logic sequence more easily than would be possible in other formats.2.1ProgrammingEarly PLCs,up to the mid-1980s,were programmed using proprietary programming panels or special-purpose programming terminals,which often had dedicated function keys representing the various logical elements of PLC programs. Programs were stored on cassette tape cartridges.Facilities for printing and documentation were very minimal due to lack of memory capacity.The very oldest PLCs used non-volatile magnetic core memory.More recently,PLCs are programmed using application software on personal computers.The computer is connected to the PLC through Ethernet,RS-232,RS-485 or RS-422cabling.The programming software allows entry and editing of the ladder-style logic.Generally the software provides functions for debugging andtroubleshooting the PLC software,for example,by highlighting portions of the logic to show current status during operation or via simulation.The software will upload and download the PLC program,for backup and restoration purposes.In some models of programmable controller,the program is transferred from a personal computer to the PLC though a programming board which writes the program into a removable chip such as an EEPROM or EPROM.3.FunctionalityThe functionality of the PLC has evolved over the years to include sequential relay control,motion control,process control,distributed control systems and networking. The data handling,storage,processing power and communication capabilities of some modern PLCs are approximately equivalent to desktop computers.PLC-like programming combined with remote I/O hardware,allow a general-purpose desktop computer to overlap some PLCs in certain applications.Regarding the practicality of these desktop computer based logic controllers,it is important to note that they have not been generally accepted in heavy industry because the desktop computers run on less stable operating systems than do PLCs,and because the desktop computer hardware is typically not designed to the same levels of tolerance to temperature, humidity,vibration,and longevity as the processors used in PLCs.In addition to the hardware limitations of desktop based logic,operating systems such as Windows do not lend themselves to deterministic logic execution,with the result that the logic may not always respond to changes in logic state or input status with the extreme consistency in timing as is expected from PLCs.Still,such desktop logic applications find use in less critical situations,such as laboratory automation and use in small facilities where the application is less demanding and critical,because they are generally much less expensive than PLCs.In more recent years,small products called PLRs(programmable logic relays),and also by similar names,have become more common and accepted.These are very much like PLCs,and are used in light industry where only a few points of I/O(i.e.a few signals coming in from the real world and a few going out)are involved,and low cost is desired.These small devices are typically made in a common physical size and shape by several manufacturers,and branded by the makers of larger PLCs to fill out their low end product range.Popular names include PICO Controller,NANO PLC, and other names implying very small controllers.Most of these have between8and 12digital inputs,4and8digital outputs,and up to2analog inputs.Size is usuallyabout4"wide,3"high,and3"deep.Most such devices include a tiny postage stamp sized LCD screen for viewing simplified ladder logic(only a very small portion of the program being visible at a given time)and status of I/O points,and typically these screens are accompanied by a4-way rocker push-button plus four more separate push-buttons,similar to the key buttons on a VCR remote control,and used to navigate and edit the logic.Most have a small plug for connecting via RS-232or RS-485to a personal computer so that programmers can use simple Windows applications for programming instead of being forced to use the tiny LCD and push-button set for this purpose.Unlike regular PLCs that are usually modular and greatly expandable,the PLRs are usually not modular or expandable,but their price can be two orders of magnitude less than a PLC and they still offer robust design and deterministic execution of the logic.4.PLC Topics4.1.FeaturesThe main difference from other computers is that PLCs are armored for severe conditions(such as dust,moisture,heat,cold)and have the facility for extensive input/output(I/O)arrangements.These connect the PLC to sensors and actuators. PLCs read limit switches,analog process variables(such as temperature and pressure), and the positions of complex positioning systems.Some use machine vision.On the actuator side,PLCs operate electric motors,pneumatic or hydraulic cylinders, magnetic relays,solenoids,or analog outputs.The input/output arrangements may be built into a simple PLC,or the PLC may have external I/O modules attached to a computer network that plugs into the PLC.4.2System scaleA small PLC will have a fixed number of connections built in for inputs and outputs. Typically,expansions are available if the base model has insufficient I/O.Modular PLCs have a chassis(also called a rack)into which are placed modules with different functions.The processor and selection of I/O modules is customised for the particular application.Several racks can be administered by a single processor,and may have thousands of inputs and outputs.A special high speed serial I/O link is used so that racks can be distributed away from the processor,reducing the wiring costs for large plants.4.3User interfacePLCs may need to interact with people for the purpose of configuration,alarmreporting or everyday control.A simple system may use buttons and lights to interact with the user.Text displays are available as well as graphical touch screens.More complex systems use a programming and monitoring software installed on a computer,with the PLC connected via a communication interface.4.4CommunicationsPLCs have built in communications ports,usually9-pin RS-232,but optionally EIA-485or Ethernet.Modbus,BACnet or DF1is usually included as one of the communications protocols.Other options include various fieldbuses such as DeviceNet or Profibus.Other communications protocols that may be used are listed in the List of automation protocols.Most modern PLCs can communicate over a network to some other system,such as a computer running a SCADA(Supervisory Control And Data Acquisition)system or web browser.PLCs used in larger I/O systems may have peer-to-peer(P2P)communication between processors.This allows separate parts of a complex process to have individual control while allowing the subsystems to co-ordinate over the communication link.These communication links are also often used for HMI devices such as keypads or PC-type workstations.4.5ProgrammingPLC programs are typically written in a special application on a personal computer, then downloaded by a direct-connection cable or over a network to the PLC.The program is stored in the PLC either in battery-backed-up RAM or some other non-volatile flash memory.Often,a single PLC can be programmed to replace thousands of relays.Under the IEC61131-3standard,PLCs can be programmed using standards-based programming languages.A graphical programming notation called Sequential Function Charts is available on certain programmable controllers.Initially most PLCs utilized Ladder Logic Diagram Programming,a model which emulated electromechanical control panel devices(such as the contact and coils of relays) which PLCs replaced.This model remains common today.IEC61131-3currently defines five programming languages for programmable control systems:FBD(Function block diagram),LD(Ladder diagram),ST (Structured text,similar to the Pascal programming language),IL(Instruction list,similar to assembly language)and SFC(Sequential function chart).These techniques emphasize logical organization of operations.While the fundamental concepts of PLC programming are common to all manufacturers,differences in I/O addressing,memory organization and instruction sets mean that PLC programs are never perfectly interchangeable between different makers.Even within the same product line of a single manufacturer,different models may not be directly compatible.5.PLC compared with other control systemsPLCs are well-adapted to a range of automation tasks.These are typically industrial processes in manufacturing where the cost of developing and maintaining the automation system is high relative to the total cost of the automation,and where changes to the system would be expected during its operational life.PLCs contain input and output devices compatible with industrial pilot devices and controls;little electrical design is required,and the design problem centers on expressing the desired sequence of operations.PLC applications are typically highly customized systems so the cost of a packaged PLC is low compared to the cost of a specific custom-built controller design.On the other hand,in the case of mass-produced goods,customized control systems are economic due to the lower cost of the components,which can be optimally chosen instead of a"generic"solution,and where the non-recurring engineering charges are spread over thousands or millions of units.For high volume or very simple fixed automation tasks,different techniques are used.For example,a consumer dishwasher would be controlled by an electromechanical cam timer costing only a few dollars in production quantities.A microcontroller-based design would be appropriate where hundreds or thousands of units will be produced and so the development cost(design of power supplies, input/output hardware and necessary testing and certification)can be spread over many sales,and where the end-user would not need to alter the control.Automotive applications are an example;millions of units are built each year,and very few end-users alter the programming of these controllers.However,some specialty vehicles such as transit busses economically use PLCs instead of custom-designed controls, because the volumes are low and the development cost would be uneconomic.Very complex process control,such as used in the chemical industry,may require algorithms and performance beyond the capability of even high-performance PLCs. Very high-speed or precision controls may also require customized solutions;forexample,aircraft flight controls.Programmable controllers are widely used in motion control,positioning control and torque control.Some manufacturers produce motion control units to be integrated with PLC so that G-code(involving a CNC machine)can be used to instruct machine movements.PLCs may include logic for single-variable feedback analog control loop,a "proportional,integral,derivative"or"PID controller".A PID loop could be used to control the temperature of a manufacturing process,for example.Historically PLCs were usually configured with only a few analog control loops;where processes required hundreds or thousands of loops,a distributed control system(DCS)would instead be used.As PLCs have become more powerful,the boundary between DCS and PLC applications has become less distinct.PLCs have similar functionality as Remote Terminal Units.An RTU,however, usually does not support control algorithms or control loops.As hardware rapidly becomes more powerful and cheaper,RTUs,PLCs and DCSs are increasingly beginning to overlap in responsibilities,and many vendors sell RTUs with PLC-like features and vice versa.The industry has standardized on the IEC61131-3functional block language for creating programs to run on RTUs and PLCs,although nearly all vendors also offer proprietary alternatives and associated development environments.6.Digital and analog signalsDigital or discrete signals behave as binary switches,yielding simply an On or Off signal(1or0,True or False,respectively).Push buttons,limit switches,and photoelectric sensors are examples of devices providing a discrete signal.Discrete signals are sent using either voltage or current,where a specific range is designated as On and another as Off.For example,a PLC might use24V DC I/O,with values above22V DC representing On,values below2VDC representing Off,and intermediate values undefined.Initially,PLCs had only discrete I/O.Analog signals are like volume controls,with a range of values between zero and full-scale.These are typically interpreted as integer values(counts)by the PLC,with various ranges of accuracy depending on the device and the number of bits available to store the data.As PLCs typically use16-bit signed binary processors,the integer values are limited between-32,768and+32,767.Pressure,temperature,flow,and weight are often represented by analog signals.Analog signals can use voltage or current with a magnitude proportional to the value of the process signal.For example,an analog0-10V input or4-20mA would be converted into an integer value of0-32767.可编程序逻辑控制器可编程序逻辑控制器(PLC)或可编程控制器是一种数字计算机用于机电自动化流程,控制机械工厂生产线等游乐项目,或照明灯具。
电气工程及其自动化专业_外文文献_英文文献_外文翻译_plc方面.
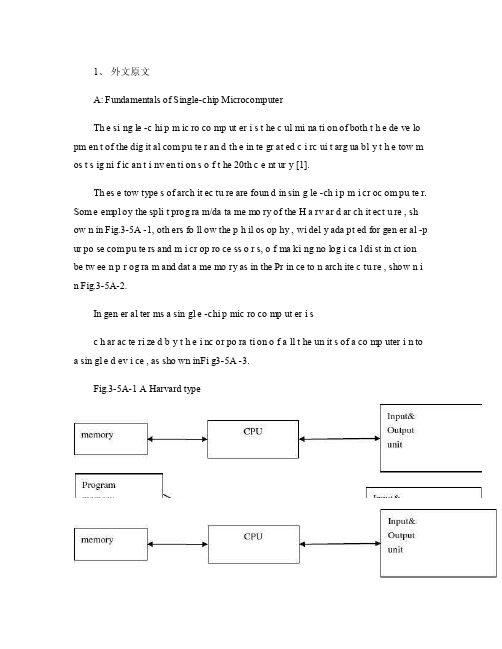
1、外文原文A: Fundamentals of Single-chip MicrocomputerTh e si ng le -c hi p m ic ro co mp ut er i s t he c ul mi na ti on of both t h e de ve lo pm en t of the dig it al com pu te r an d th e in te gr at ed c i rc ui t arg ua bl y t h e tow m os t s ig ni f ic an t i nv en ti on s o f t he 20th c e nt ur y [1].Th es e tow type s of arch it ec tu re are foun d in sin g le -ch i p m i cr oc om pu te r. Som e empl oy the spli t prog ra m/da ta me mo ry of the H a rv ar d ar ch it ect u re , sh ow n in Fig.3-5A -1, oth ers fo ll ow the p h il os op hy , wi del y ada pt ed for gen er al -p ur po se com pu te rs and m i cr op ro ce ss o r s, o f ma ki ng no log i ca l di st in ct ion be tw ee n p r og ra m and dat a me mo ry as in the Pr in ce to n arch ite c tu re , show n i n Fig.3-5A-2.In gen er al ter ms a sin gl e -chi p mic ro co mp ut er i sc h ar ac te ri zed b y t he i nc or po ra ti on of a ll t he un it s of a co mp uter i n to a sin gl e d ev i ce , as sho wn inFi g3-5A -3.Fig.3-5A-1 A Harvard typeFig.3-5A-2. A conventional Princeton computerFig3-5A-3. Principal features of a microcomputerRead only memory (ROM.R OM is usua ll y for the pe rm an ent,n o n-vo la ti le stor a ge of an app lic a ti on s pr og ra m .M an ym i cr oc om pu te rs and m are inte nd e d for high -v ol um e ap pl ic at ions a n d he nc e t h e eco n om ic al man uf act u re of th e de vic e s re qu ir es t h at t he cont en t s o f t he prog ra m me m or y be co mm it t ed perm a ne ntly d u ri ng the man ufa c tu re of ch ip s .Cl ea rl y, thi s im pl ie s a r i go ro us app ro ach to ROM cod e deve l op me nt sin ce cha ng es can not b e mad e afte r manu f a c tu re .Th is dev e lo pm en t proc ess may invo lv e e m ul at io n us in g aso ph is ti ca te d de ve lo pm en t sy ste m wit h a h a rd wa re emu la tio n cap ab il it y as w el l as the use o f po we rf ul s o ft wa re too ls.So me man uf act u re rs pro vi de add it io na l RO M opt i on s by i n cl ud in g in their ra n ge dev ic es wit h (or int en de d fo r use wit h u s er pro gr am ma ble me mo ry. Th e sim p le st of th es e is usu al ly d e vi ce whi ch can op er at e in a micro p ro ce ssor mod e by usi ng som e o f the inp ut /outp u t li ne s as an ad dr es s an d da ta b us fora c ce ss in g ex te rna l mem or y. Thi s t y pe of de vi ce can beh av ef u nc ti on al ly as th e sing le chip mi cr oc om pu te r from whi ch it is d e ri ve d al be it wit h re st ri ct ed I/O and a mod if ied ex te rn al c i rc ui t. The use of thes e d ev ic es is com mo n eve n in prod uc ti on c i rc ui ts wher e t he vo lu me does no tj us ti f y t h e d ev el o pm en t c osts o f c us to m o n -ch i p R OM [2];t he re c a n s ti ll bea s ignif i ca nt saving i n I /O and o th er c h ip s com pa re d to a conv en ti on al mi c ro pr oc es sor b a se d ci rc ui t. Mor e ex ac t re pl ace m en t fo r RO M dev i ce s ca n be o b ta in ed in th e fo rm of va ri an ts w it h 'p ig gy -b ack 'E P RO M(Er as ab le pro gr am ma bl e ROM s oc ke ts or dev ic e s with EPROM i n st ea d o f RO M 。
关于plc的外文文献翻译中英文翻译外文翻译

外文资料译文PLC technique discussion and future developmentAlong with the development of the ages, the technique that is nowadays is also gradually perfect, the competition plays more strong; the operation that list depends the artificial has already can't satisfied with the current manufacturing industry foreground, also can't guarantee the request of the higher quantity and high new the image of the technique business enterprise.The people see in produce practice, automate brought the tremendous convenience and the product quantities for people up of assurance, also eased the personnel's labor strength, reduce the establishment on the personnel. The target control of the hard realization in many complicated production lines, whole and excellent turn, the best decision etc., well-trained operation work, technical personnel or expert, governor but can judge and operate easily, can acquire the satisfied result. The research target of the artificial intelligence makes use of the calculator exactly to carry out, imitate these intelligences behavior, moderating the work through person's brain and calculators, with the mode that person's machine combine, for resolve the very complicated problem to look for the best pathPLC language is not we imagine of edit collected materials the language or language of Cs to carry on weaving the distance, but the trapezoid diagram that the adoption is original after the electric appliances to control, make the electrical engineering teacher while weaving to write the procedure very easy comprehended the PLC language, and a lot of non- electricity professional also very quickly know and go deep into to the PLC.Is PLC one of the advantage above and only, this is also one part that the people comprehend more and easily, in a lot of equipments, the people havealready no longer hoped to see too many control buttons, they damage not only and easily and produce the artificial error easiest, small is not a main error perhaps you can still accept; But lead even is a fatal error greatly is what we can't is tolerant of. New technique always for bringing more safe and convenient operation for us, make we a lot of problems for face on sweep but light, do you understand the HMI? Says the HMI here you basically not clear what it is, also have no interest understanding, change one inside text explains it into the touch to hold or man-machine interface you knew, and it combines with the PLC to our larger space.When we are work a work piece, giving the PLC a signal, counting PLC inner part the machine add 1 to compute us for a day of workload, a count the machine and can solve problem in brief, certainly they also can keep the data under the condition of dropping the electricity, urging the data not to throw to lose, this is also what we hope earnestly.The PLC still has the function that the high class counts the machine, being us while accept some dates of high speed, the high speed that here say is the data of the in all aspects tiny second class, for example the bar code scanner is scanning the data continuously, calculating high-speed signal of the data processor DSP etc., we will adopt the high class to count the machine to help we carry on count. It at the PLC carries out the procedure once discover that the high class counts the machine to should of interruption, will let go of the work on the hand immediately. The trapezoid diagram procedure that passes by to weave the distance again explains the high class for us to carry out procedure to count machine would automatic performance to should of work, thus rise the Class that the high class counts the machine to high one Class.You heard too many this phrases perhaps:" crash", the meaning that is mostly is a workload of CPU to lead greatly, the internal resources shortage etc. the circumstance can't result in procedure circulate. The PLC also has the similar circumstance, there is a watchdog WDT in the inner part of PLC, wecan establish time that a procedure of WDT circulate, being to appear the procedure to jump to turn the mistake in the procedure movement process or the procedure is busy, movement time of the procedure exceeds WDT constitution time, the CPU turn but the WDT reset the appearance. The procedure restarts the movement, but will not carry on the breakage to the interruption.The PLC development has already entered for network ages of correspondence from the mode of the one, and together other works control the net plank and I/ O card planks to carry on the share easily. A state software can pass all se hardwires link, more animation picture of keep the view to carries on the control, and cans pass the Internet to carry on the control in the foreign land, the blast-off that is like the absolute being boat is to adopt this kind of way to make airship go up the sky.The development of the higher layer needs our continuous effort to obtain. The PLC emergence has already affected a few persons fully, we also obtained more knowledge and precepts from the top one experience of the generation, coming to the continuous development PLC technique, push it toward higher wave tide.Knowing the available PLC network options and their best applications will ensure an efficient and flexible control system design.The programmable logic controller's (PLC's) ability to support a range of communication methods makes it an ideal control and data acquisition device for a wide variety of industrial automation and facility control applications. However, there is some confusion because so many possibilities exist. To help eliminate this confusion, let's list what communications are available and when they would be best applied.To understand the PLC's communications versatility, let's first define the terms used in describing the various systems.ASCII: This stands for "American Standard Code for Information Interchange." As shown in Fig. 1, when the letter "A" is transmitted, forinstance, it's automatically coded as "65" by the sending equipment. The receiving equipment translates the "65" back to the letter "A." Thus, different devices can communicate with each other as long as both use ASCII code.ASCII module: This intelligent PLC module is used for connecting PLCs to other devices also capable of communicating using ASCII code as a vehicle.Bus topology: This is a linear local area network (LAN) arrangement, as shown in Fig. 2A, in which individual nodes are tapped into a main communications cable at a single point and broadcast messages. These messages travel in both directions on the bus from the point of connection until they are dissipated by terminators at each end of the bus.CPU: This stands for "central processing unit," which actually is that part of a computer, PLC, or other intelligent device where arithmetic and logical operations are performed and instructions are decoded and executed.Daisy chain: This is a description of the connection of individual devices in a PLC network, where, as shown in Fig. 3, each device is connected to the next and communications signals pass from one unit to the next in a sequential fashion.Distributed control: This is an automation concept in which portions of an automated system are controlled by separate controllers, which are located in close proximity to their area of direct control (control is decentralized and spread out over the system).Host computer: This is a computer that's used to transfer data to, or receive data from, a PLC in a PLC/computer network.Intelligent device: This term describes any device equipped with its own CPU.I/O: This stands for "inputs and outputs," which are modules that handle data to the PLC (inputs) or signals from the PLC (outputs) to an external device.Kbps: This stands for "thousand bits per second," which is a rate of measure for electronic data transfer.Mbps: This stands for "million bits per second."Node: This term is applied to any one of the positions or stations in a network. Each node incorporates a device that can communicate with all other devices on the network.Protocol: The definition of how data is arranged and coded for transmission on a network.Ring topology. This is a LAN arrangement, as shown in Fig. 2C, in which each node is connected to two other nodes, resulting in a continuous, closed, circular path or loop for messages to circulate, usually in one direction. Some ring topologies have a special "loop back" feature that allows them to continue functioning even if the main cable is severed.RS232. This is an IEEE standard for serial communications that describes specific wiring connections, voltage levels, and other operating parameters for electronic data communications. There also are several other RS standards defined.Serial: This is an electronic data transfer scheme in which information is transmitted one bit at a time.Serial port: This the communications access point on a device that is set up for serial communications.Star topology. This is a LAN arrangement in which, as shown in Fig. 2B, nodes are connected to one another through a central hub, which can be active or passive. An active hub performs network duties such as message routing and maintenance. A passive central hub simply passes the message along to all the nodes connected to it.Topology: This relates to a specific arrangement of nodes in a LAN in relation to one another.Transparent: This term describes automatic events or processes built into a system that require no special programming or prompting from an operator.Now that we're familiar with these terms, let's see how they are used in describing the available PLC network options.PLC network optionsPLC networks provide you with a variety of networking options to meet specific control and communications requirements. Typical options include remote I/O, peer-to-peer, and host computer communications, as well as LANs. These networks can provide reliable and cost-effective communications between as few as two or as many as several hundred PLCs, computers, and other intelligent devices.Many PLC vendors offer proprietary networking systems that are unique and will not communicate with another make of PLC. This is because of the different communications protocols, command sequences, error-checking schemes, and communications media used by each manufacturer.However, it is possible to make different PLCs "talk" to one another; what's required is an ASCII interface for the connection(s), along with considerable work with software.Remote I/0 systemsA remote I/O configuration, as shown in Fig. 4A, has the actual inputs and outputs at some distance from the controller and CPU. This type of system, which can be described as a "master-and-slave" configuration, allows many distant digital and analog points to be controlled by a single PLC. Typically, remote I/Os are connected to the CPU via twisted pair or fiber optic cables.Remote I/O configurations can be extremely cost-effective control solutions where only a few I/O points are needed in widely separated areas. In this situation, it's not always necessary, or practical for that matter, to have a controller at each site. Nor is it practical to individually hard wire each I/O point over long distances back to the CPU. For example, remote I/O systems can be used in acquiring data from remote plant or facility locations. Information such as cycle times, counts, duration or events, etc. then can be sent back to the PLC for maintenance and management reporting.In a remote I/O configuration, the master controller polls the slaved I/O for its current I/O status. The remote I/O system responds, and the master PLCthen signals the remote I/O to change the state of outputs as dictated by the control program in the PLC's memory. This entire cycle occurs hundreds of times per second.Peer-to-peer networksPeer-to-peer networks, as shown in Fig. 4B, enhance reliability by decentralizing the control functions without sacrificing coordinated control. In this type of network, numerous PLCs are connected to one another in a daisy-chain fashion, and a common memory table is duplicated in the memory of each. In this way, when any PLC writes data to this memory area, the information is automatically transferred to all other PLCs in the network. They then can use this information in their own operating programs.With peer-to-peer networks, each PLC in the network is responsible for its own control site and only needs to be programmed for its own area of responsibility. This aspect of the network significantly reduces programming and debugging complexity; because all communications occur transparently to the user, communications programming is reduced to simple read-and-write statements.In a peer-to-peer system, there's no master PLC. However, it's possible to designate one of the PLCs as a master for use as a type of group controller. This PLC then can be used to accept input information from an operator input terminal, for example, sending all the necessary parameters to other PLCs and coordinating the sequencing of various events.Host computer linksPLCs also can be connected with computers or other intelligent devices. In fact, most PLCs, from the small to the very large, can be directly connected to a computer or part of a multi drop host computer network via RS232C or RS422 ports. This combination of computer and controller maximizes the capabilities of the PLC, for control and data acquisition, as well as the computer, for data processing, documentation, and operator interface.In a PLC/computer network, as shown in Fig. 4C, all communications areinitiated by the host computer, which is connected to all the PLCs in a daisy-chain fashion. This computer individually addresses each of its networked PLCs and asks for specific information. The addressed PLC then sends this information to the computer for storage and further analysis. This cycle occurs hundreds of times per second.Host computers also can aid in programming PLCs; powerful programming and documentation software is available for program development. Programs then can be written on the computer in relay ladder logic and downloaded into the PLC. In this way, you can create, modify, debug, and monitor PLC programs via a computer terminal.In addition to host computers, PLCs often must interface with other devices, such as operator interface terminals for large security and building management systems. Although many intelligent devices can communicate directly with PLCs via conventional RS232C ports and serial ASCII code, some don't have the software ability to interface with individual PLC models. Instead, they typically send and receive data in fixed formats. It's the PLC programmer's responsibility to provide the necessary software interface.The easiest way to provide such an interface to fixed-format intelligent devices is to use an ASCII/BASIC module on the PLC. This module is essentially a small computer that plugs into the bus of the PLC. Equipped with RS232 ports and programmed in BASIC, the module easily can handle ASCII communications with peripheral devices, data acquisition functions, programming sequences, "number crunching," report and display generation, and other requirements.Access, protocol, and modulation functions of LANsBy using standard interfaces and protocols, LANs allow a mix of devices (PLCs, PCs, mainframe computers, operator interface terminals, etc.) from many different vendors to communicate with others on the network.Access: A LAN's access method prevents the occurrence of more than one message on the network at a time. There are two common access methods.Collision detection is where the nodes "listen" to the network and transmit only if there are no other messages on the network. If two nodes transmit simultaneously, the collision is detected and both nodes retransmit until their messages get through properly.Token passing allows each node to transmit only if it's in possession of a special electronic message called a token. The token is passed from node to node, allowing each an opportunity to transmit without interference. Tokens usually have a time limit to prevent a single node from tying up the token for a long period of time.Protocol: Network protocols define the way messages are arranged and coded for transmission on the LAN. The following are two common types.Proprietary protocols are unique message arrangements and coding developed by a specific vendor for use with that vendor's product only.Open protocols are based on industry standards such as TCP/IP or ISO/OSI models and are openly published.Modulation: Network modulation refers to the way messages are encoded for transmission over a cable. The two most common types are broadband and baseband.Network transmission interfacesThe vast majority of PLC communications is done via RS232C and twisted pair cables. Most PLCs have an RS232 port and are capable of handling communications with host computers, printers, terminals, and other devices. Maximum transmission speed is Kbps.The distance and data transmission rates are standards for the various interfaces. Their actual performance is a function of the driving devices and varies significantly between manufacturers. As such, you should consult the manufacturer's specifications for actual distance and data transmission rate capabilities.The only real limitation on RS232C is the 50-ft recommended distance between devices. While RS232C installations often can achieve cablingdistances greater than this, the "unbalanced" design of the interface results in a greater susceptibility to surrounding electrical noise and reduced data integrity. This is particularly true where electromagnetic interference (EMI) and radio-frequency interference (RFI) are known to exist.When longer transmission distances are needed, RS422 is a better choice. Unlike the RS232C interface, RS422 is "balanced." Each of its primary signals consists of two wires that are always at opposite logic levels, with respect to signal ground. As a result, the interface can achieve longer transmission distance (4000 ft) and higher data transmission rates (up to 90 Kbps). In shorter runs (less than 50 ft), data transfer can reach 10 Mbps.Fiber optic communications are gaining greater acceptance and are being used in more and more installations. Fiber optic cable is virtually impervious to harsh environmental conditions and electrical noise. Also, these links can span extremely long distances and transmit data at very high speeds. For example, in some LAN systems, these links can transmit at relatively high speeds and span long distances before requiring a repeater. When repeaters are used, virtually unlimited distances can be achieved.可编程操纵器技术讨论与以后进展随着时期的进展,现今的技术也日趋完善、竞争愈演愈烈;单靠人工的操作已不能知足于目前的制造业前景,也无法保证更高质量的要求和高新技术企业的形象.人们在生产实践中看到,自动化给人们带来了极大的便利和产品质量上的保证,同时也减轻了人员的劳动强度,减少了人员上的编制.在许多复杂的生产进程中难以实现的目标操纵、整体优化、最正确决策等,熟练的操作工、技术人员或专家、治理者却能够容易判定和操作,能够取得中意的成效.人工智能的研究目标正是利用运算机来实现、模拟这些智能行为,通过人脑与运算机和谐工作,以人机结合的模式,为解决十分复杂的问题寻觅最正确的途径PLC的语言并非是咱们所想象的汇编语言或C语言来进行编程,而是采纳原有的继电器操纵的梯形图,使得电气工程师在编写程序时很容易就明白得了PLC的语言,而且很多的非电气专业人士也对PLC专门快熟悉并深切。
可编程控制器外文翻译、中英文翻译、外文文献翻译
毕业设计中英文翻译院系专业班级姓名学号指导教师20**年 4 月Programmable Logic Controllers (PLC)1、MotivationProgrammable Logic Controllers (PLC), a computing device invented by Richard E. Morley in 1968, have been widely used in industry including manufacturing systems, transportation systems, chemical process facilities, and many others. At that time, the PLC replaced the hardwired logic with soft-wired logic or so-called relay ladder logic (RLL), a programming language visually resembling the hardwired logic, and reduced thereby the configuration time from 6 months down to 6 days [Moody and Morley, 1999].Although PC based control has started to come into place, PLC based control will remain the technique to which the majority of industrial applications will adhere due to its higher performance, lower price, and superior reliability in harsh environments. Moreover, according to a study on the PLC market of Frost and Sullivan [1995], an increase of the annual sales volume to 15 million PLCs per year with the hardware value of more than 8 billion US dollars has been predicted, though the prices of computing hardware is steadily dropping. The inventor of the PLC, Richard E Morley, fairly considers the PLC market as a 5-billion industry at the present time.Though PLCs are widely used in industrial practice, the programming of PLC based control systems is still very much relying on trial-and-error. Alike software engineering, PLC software design is facing the software dilemma or crisis in a similar way. Morley himself emphasized this aspect most forcefully by indicating [Moody and Morley, 1999, p. 110]:`If houses were built like software projects, a single woodpecker could destroy civilization.”Particularly, practical problems in PLC programming are to eliminate software bugs and to reduce the maintenance costs of old ladder logic programs. Though the hardware costs of PLCs are dropping continuously, reducing the scan time of the ladder logic is still an issue in industry so that low-cost PLCs can be used.In general, the productivity in generating PLC is far behind compared to other domains, for instance, VLSI design, where efficient computer aided design tools are in practice. Existent software engineering methodologies are not necessarily applicable to the PLC basedsoftware design because PLC-programming requires a simultaneous consideration of hardware and software. The software design becomes, thereby, more and more the major cost driver. In many industrial design projects, more than SO0/a of the manpower allocated for the control system design and installation is scheduled for testing and debugging PLC programs [Rockwell, 1999].In addition, current PLC based control systems are not properly designed to support the growing demand for flexibility and reconfigurability of manufacturing systems. A further problem, impelling the need for a systematic design methodology, is the increasing software complexity in large-scale projects.PLCs (programmable logic controllers) are the control hubs for a wide variety of automated systems and processes. They contain multiple inputs and outputs that use transistors and other circuitry to simulate switches and relays to control equipment. They are programmable via software interfaced via standard computer interfaces and proprietary languages and network options.Programmable logic controllers I/O channel specifications include total number of points, number of inputs and outputs, ability to expand, and maximum number of channels. Number of points is the sum of the inputs and the outputs. PLCs may be specified by any possible combination of these values. Expandable units may be stacked or linked together to increase total control capacity. Maximum number of channels refers to the maximum total number of input and output channels in an expanded system. PLC system specifications to consider include scan time, number of instructions, data memory, and program memory. Scan time is the time required by the PLC to check the states of its inputs and outputs. Instructions are standard operations (such as math functions) available to PLC software. Data memory is the capacity for data storage. Program memory is the capacity for control software.Available inputs for programmable logic controllers include DC, AC, analog, thermocouple, RTD, frequency or pulse, transistor, and interrupt inputs. Outputs for PLCs include DC, AC, relay, analog, frequency or pulse, transistor, and triac. Programming options for PLCs include front panel, hand held, and computer.Programmable logic controllers use a variety of software programming languages for control. These include IEC 61131-3, sequential function chart (SFC), function block diagram (FBD), ladder diagram (LD), structured text (ST), instruction list (IL), relay ladder logic (RLL), flow chart, C, and Basic. The IEC 61131-3 programming environment provides support for five languages specified by the global standard: Sequential Function Chart,Function Block Diagram, Ladder Diagram, Structured Text, and Instruction List. This allows for multi-vendor compatibility and multi-language programming. SFC is a graphical language that provides coordination of program sequences, supporting alternative sequence selections and parallel sequences. FBD uses a broad function library to build complex procedures in a graphical format. Standard math and logic functions may be coordinated with customizable communication and interface functions. LD is a graphic language for discrete control and interlocking logic. It is completely compatible with FBD for discrete function control. ST is a text language used for complex mathematical procedures and calculations less well suited to graphical languages. IL is a low-level language similar to assembly code. It is used in relatively simple logic instructions. Relay Ladder Logic (RLL), or ladder diagrams, is the primary programming language for programmable logic controllers (PLCs). Ladder logic programming is a graphical representation of the program designed to look like relay logic. Flow Chart is a graphical language that describes sequential operations in a controller sequence or application. It is used to build modular, reusable function libraries. C is a high level programming language suited to handle the most complex computation, sequential, and data logging tasks. It is typically developed and debugged on a PC. BASIC is a high level language used to handle mathematical, sequential, data capturing and interface functions.Programmable logic controllers can also be specified with a number of computer interface options, network specifications and features. PLC power options, mounting options and environmental operating conditions are all also important to consider.2、ResumeA PLC (programmable Logic Controller) is a device that was invented to replace the necessary sequential relay circuits for control.The PLC works by looking at its input and depending upon their state, turning on/off its outputs. The user enters a program, usually via software or programmer, which gives the desired results.PLC is used in many "real world" applications. If there is industry present, chance are good that there is a PLC present. If you are involved in machining, packing, material handling, automated assembly or countless other industries, you are probably already using them. If you are not, you are wasting money and time. Almost any application that needs some type of electrical control has a need for a PLC.For example, let's assume that when a switch turns on we want to turn a solenoid on for 5second and then turn it off regardless of how long the switch is on for. We can do this with a simple external timer. But what if the process included 10 switches and solenoids? We should need 10 external times. What if the process also needed to count how many times the switch individually turned on? We need a lot of external counters.As you can see the bigger the process the more of a need we have for a PLC. We can simply program the PLC to count its input and turn the solenoids on for the specified time.We will take a look at what is considered to be the "top 20" PLC instructions. It can be safely estimated that with a firm understanding of these instructions one can solve more than 80% of the applications in existence.Of course we will learn more than just these instruction to help you solve almost ALL potential PLC applications.The PLC mainly consists of a CPU, memory areas, and appropriate circuits to receive input/output data. We can actually consider the PLC to be a box full of hundreds or thousands of separate relay, counters, times and data storage locations,Do these counters,timers, etc. really exist? No,they don't "physically" exist but rather they simulated and be considered software counters, timers, etc. . These internal relays are simulated through bit locations in registers.What does each part do? Let me tell you.Input RelaysThese are connected to the outside world.They physically exsit and receive signals from switches,sensors,ect..Typically they are not relays but rather they are transistors.Internal Utility RelaysThese do not receive signals from the outside world nor do they physically exist.they are simulated relays and are what enables a PLC to eliminate external relays.There are also some special relays that are dedicated to performing only one task.Some are always on while some are always off.Some are on only once during power-on and are typically used for initializing data that was stored.CountersThese again do not physically exist. They are simulated counters and they can be programmed to count pulses.Typically these counters can count up,down or both up anddown.Since they are simulated,they are limited in their counting speed.Some manufacturers also include high-speed counters that are hardware based.We think of these as physically existing.Most times these counters can count up,down or up and down.TimersThese also do not physically exist.They come in many varieties and increments.The most common type is an on-delay type.Others include off-delays and both retentive and non-retentive types.Increments vary from 1ms through 1s.Output RelaysThere are connected to the outside world.They physically exist and send on/off signals to solenoids,lights,etc..They can be transistors,relays,or triacs depending upon the model chosen Data StorageTypically there are registers assigned to simply store data.They are usually used as temporary storage for math or data manipulation.They can also typically be used to store data when power is removed form the PLC.Upon power-up they will still have the same contents as before power was moved.Very convenient and necessary!A PLC works by continually scanning a program.We can think of this scan cycle as consisting of 3 important steps.There are typically more than 3 but we can focus on the important parts and not worry about the others,Typically the others are checking the system and updating the current internal counter and timer values,Step 1 is to check input status,First the PLC takes a look at each input to determine if it is on off.In other words,is the sensor connected to the first input on?How about the third...It records this data into its memory to be used during the next step.Step 2 is to execute program.Next the PLC executes your program one instruction at a time.Maybe your program said that if the first input was on then it should turn on the first output.Since it already knows which inputs are on/off from the previous step,it will be able to decide whether the first output should be turned on based on the state of the first input.It will store the execution results for use later during the next step.Step 3 is to update output status.Finally the PLC updates the status the outputs.It updates the outputs based on which inputs were on during the first step and the results executing your program during the second step.Based on the example in step 2 it would now turn on the firstoutput because the first input was on and your program said to turn on the first output when this condition is true.After the third step the PLC goes back to step one repeats the steps continuously.One scan time is defined as the time it takes to execute the 3 steps continuously.One scan time is defined as the time it takes to execute the 3 steps listed above.Thus a practical system is controlled to perform specified operations as desired.3、PLC StatusThe lack of keyboard, and other input-output devices is very noticeable on a PLC. On the front of the PLC there are normally limited status lights. Common lights indicate;power on - this will be on whenever the PLC has powerprogram running - this will often indicate if a program is running, or if no program is runningfault - this will indicate when the PLC has experienced a major hardware or software problemThese lights are normally used for debugging. Limited buttons will also be provided for PLC hardware. The most common will be a run/program switch that will be switched to program when maintenance is being conducted, and back to run when in production. This switch normally requires a key to keep unauthorized personnel from altering the PLC program or stopping execution. A PLC will almost never have an on-off switch or reset button on the front. This needs to be designed into the remainder of the system.The status of the PLC can be detected by ladder logic also. It is common for programs to check to see if they are being executed for the first time, as shown in Figure 1. The ’first scan’ input will be true on the very first time the ladder logic is scanned, but false on every other scan. In this case the address for ’first scan’ in a PLC-5 is ’S2:1/14’. With the logic in the example the first scan will seal on ’light’, until ’clear’ is turned on. So the light will turn on after the PLC has been turned on, but it will turn off and stay off after ’clear’ is turned on. The ’first scan’ bit is also referred to at the ’first pass’ bit.Figure 1 An program that checks for the first scan of the PLC4、Memory TypesThere are a few basic types of computer memory that are in use today.RAM (Random Access Memory) - this memory is fast, but it will lose its contents when power is lost, this is known as volatile memory. Every PLC uses this memory for the central CPU when running the PLC.ROM (Read Only Memory) - this memory is permanent and cannot be erased. It is often used for storing the operating system for the PLC.EPROM (Erasable Programmable Read Only Memory) - this is memory that can be programmed to behave like ROM, but it can be erased with ultraviolet light and reprogrammed.EEPROM (Electronically Erasable Programmable Read Only Memory) – This memory can store programs like ROM. It can be programmed and erased using a voltage, so it is becoming more popular than EPROMs.All PLCs use RAM for the CPU and ROM to store the basic operating system for the PLC. When the power is on the contents of the RAM will be kept, but the issue is what happens when power to the memory is lost. Originally PLC vendors used RAM with a battery so that the memory contents would not be lost if the power was lost. This method is still in use, but is losing favor. EPROMs have also been a popular choice for programming PLCs. The EPROM is programmed out of the PLC, and then placed in the PLC. When the PLC is turned on the ladder logic program on the EPROM is loaded into the PLC and run. This method can be very reliable, but the erasing and programming technique can be time consuming. EEPROM memories are a permanent part of the PLC, and programs can be stored in them like EPROM. Memory costs continue to drop, and newer types (such as flash memory) are becoming available, and these changes will continue to impact PLCs.5、Objective and Significance of the ThesisThe objective of this thesis is to develop a systematic software design methodology for PLC operated automation systems. The design methodology involves high-level description based on state transition models that treat automation control systems as discrete event systems, a stepwise design process, and set of design rules providing guidance and measurements to achieve a successful design. The tangible outcome of this research is to find a way to reduce the uncertainty in managing the control software development process, that is, reducing programming and debugging time and their variation, increasing flexibility of theautomation systems, and enabling software reusability through modularity. The goal is to overcome shortcomings of current programming strategies that are based on the experience of the individual software developer.A systematic approach to designing PLC software can overcome deficiencies in the traditional way of programming manufacturing control systems, and can have wide ramifications in several industrial applications. Automation control systems are modeled by formal languages or, equivalently, by state machines. Formal representations provide a high-level description of the behavior of the system to be controlled. State machines can be analytically evaluated as to whether or not they meet the desired goals. Secondly, a state machine description provides a structured representation to convey the logical requirements and constraints such as detailed safety rules. Thirdly, well-defined control systems design outcomes are conducive to automatic code generation- An ability to produce control software executable on commercial distinct logic controllers can reduce programming lead-time and labor cost. In particular, the thesis is relevant with respect to the following aspect Customer-Driven ManufacturingIn modern manufacturing, systems are characterized by product and process innovation, become customer-driven and thus have to respond quickly to changing system requirements.A major challenge is therefore to provide enabling technologies that can economically reconfigure automation control systems in response to changing needs and new opportunities. Design and operational knowledge can be reused in real-time, therefore, giving a significant competitive edge in industrial practice.Higher Degree of Design Automation and Software QualityStudies have shown that programming methodologies in automation systems have not been able to match rapid increase in use of computing resources. For instance, the programming of PLCs still relies on a conventional programming style with ladder logic diagrams. As a result, the delays and resources in programming are a major stumbling stone for the progress of manufacturing industry. Testing and debugging may consume over 50% of the manpower allocated for the PLC program design. Standards [IEC 60848, 1999; IEC-61131-3, 1993; IEC 61499, 1998; ISO 15745-1, 1999] have been formed to fix and disseminate state-of-the-art design methods, but they normally cannot participate in advancingthe knowledge of efficient program and system design.A systematic approach will increase the level of design automation through reusing existing software components, and will provide methods to make large-scale system design manageable. Likewise, it will improve software quality and reliability and will be relevant to systems high security standards, especially those having hazardous impact on the environment such as airport control, and public railroads.System ComplexityThe software industry is regarded as a performance destructor and complexity generator. Steadily shrinking hardware prices spoils the need for software performance in terms of code optimization and efficiency. The result is that massive and less efficient software code on one hand outpaces the gains in hardware performance on the other hand. Secondly, software proliferates into complexity of unmanageable dimensions; software redesign and maintenance-essential in modern automation systems-becomes nearly impossible. Particularly, PLC programs have evolved from a couple lines of code 25 years ago to thousands of lines of code with a similar number of 1/O points. Increased safety, for instance new policies on fire protection, and the flexibility of modern automation systems add complexity to the program design process. Consequently, the life-cycle cost of software is a permanently growing fraction of the total cost. 80-90% of these costs are going into software maintenance, debugging, adaptation and expansion to meet changing needs [Simmons et al., 1998].Design Theory DevelopmentToday, the primary focus of most design research is based on mechanical or electrical products. One of the by-products of this proposed research is to enhance our fundamental understanding of design theory and methodology by extending it to the field of engineering systems design. A system design theory for large-scale and complex system is not yet fully developed. Particularly, the question of how to simplify a complicated or complex design task has not been tackled in a scientific way. Furthermore, building a bridge between design theory and the latest epistemological outcomes of formal representations in computer sciences and operations research, such as discrete event system modeling, can advance future development in engineering design.Application in Logical Hardware DesignFrom a logical perspective, PLC software design is similar to the hardware design of integrated circuits. Modern VLSI designs are extremely complex with several million parts and a product development time of 3 years [Whitney, 1996]. The design process is normally separated into a component design and a system design stage. At component design stage, single functions are designed and verified. At system design stage, components are aggregated and the whole system behavior and functionality is tested through simulation. In general, a complete verification is impossible. Hence, a systematic approach as exemplified for the PLC program design may impact the logical hardware design.可编程控制器1、前言可编程序的逻辑控制器(PLC),是由Richard E.Morley 于1968年发明的,如今已经被广泛的应用于生产、运输、化学等工业中。
电气工程及其自动化专业 外文文献 英文文献 外文翻译 plc方面
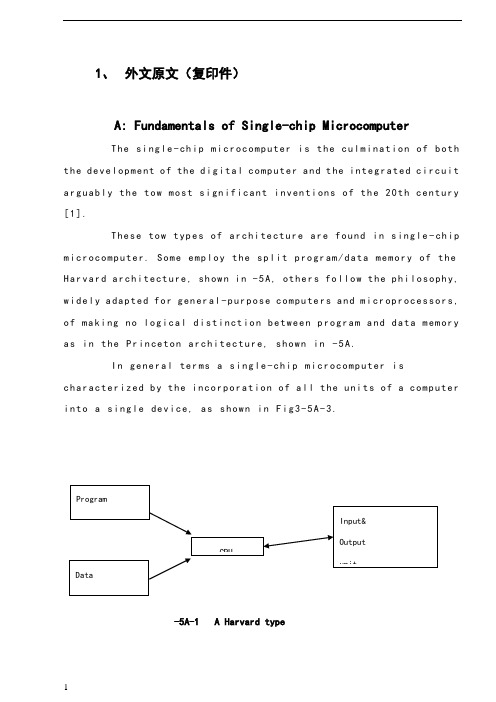
1、外文原文(复印件)A: Fundamentals of Single-chip MicrocomputerTh e si ng le-ch i p mi cr oc om pu ter is t he c ul mi nat i on o f bo th t h e d ev el op me nt o f th e d ig it al com p ut er an d t he int e gr at ed ci rc ui ta r gu ab ly th e t ow m os t s i gn if ic ant i nv en ti on s o f t h e 20t h c en tu ry[1].Th es e to w typ e s of a rc hi te ctu r e ar e fo un d i n s in gl e-ch ip m i cr oc om pu te r. So m e em pl oy t he sp l it p ro gr am/d ata me mo ry o f th e H a rv ar d ar ch it ect u re, sh ow n i n -5A, ot he rs fo ll ow th e ph i lo so ph y, w i de ly a da pt ed fo r g en er al-p ur pos e c om pu te rs an d m i cr op ro ce ss or s, o f m a ki ng no lo gi c al di st in ct io n b e tw ee n p ro gr am a n d da t a m em ory a s i n th e Pr in cet o n ar ch it ec tu re,sh ow n in-5A.In g en er al te r ms a s in gl e-chi p m ic ro co mp ut er i sc h ar ac te ri zed b y the i nc or po ra tio n of al l t he uni t s o f a co mp ut er i n to a s in gl e dev i ce, as s ho wn in Fi g3-5A-3.-5A-1 A Harvard type-5A. A conventional Princeton computerFig3-5A-3. Principal features of a microcomputerRead only memory (ROM).R OM i s u su al ly f or th e p er ma ne nt, n o n-vo la ti le s tor a ge o f an a pp lic a ti on s pr og ra m .M an ym i cr oc om pu te rs an d mi cr oc on tr ol le r s a re in t en de d fo r h ig h-v ol ume a p pl ic at io ns a nd h en ce t he e co nom i ca l ma nu fa ct ure of t he d ev ic es r e qu ir es t ha t the co nt en ts o f the pr og ra m me mo ry b e co mm it te dp e rm an en tl y d ur in g th e m an uf ac tu re o f c hi ps . Cl ear l y, th is im pl ie sa ri g or ou s a pp roa c h t o R OM co de d e ve lo pm en t s in ce c ha ng es ca nn otb e m ad e af te r man u fa ct ur e .T hi s d e ve lo pm en t pr oce s s ma y in vo lv e e m ul at io n us in g a s op hi st ic at ed deve lo pm en t sy st em w i th a ha rd wa re e m ul at io n ca pa bil i ty a s we ll a s th e u se of po we rf ul so ft wa re t oo ls.So me m an uf act u re rs p ro vi de ad d it io na l RO M opt i on s byi n cl ud in g i n th ei r ra ng e de vi ce s wi th (or i nt en de d fo r us e wi th) u s er pr og ra mm ab le m em or y. Th e s im p le st of th es e i s us ua ll y d ev ice w h ic h ca n op er ate in a m ic ro pr oce s so r mo de b y usi n g so me o f th e i n pu t/ou tp ut li ne s as a n ad dr es s an d da ta b us f or acc e ss in g e xt er na l m e mo ry. T hi s t ype o f d ev ic e c an b e ha ve fu nc ti on al l y a s t he si ng le c h ip mi cr oc om pu te r fr om wh ic h i t i s de ri ve d a lb eit w it h r es tr ic ted I/O an d a mo di fie d e xt er na l ci rcu i t. T he u se o f t h es e RO Ml es sd e vi ce s is c om mo n e ve n in p ro du ct io n c ir cu it s wh er e t he v ol um e do es n o t ju st if y th e d e ve lo pm en t co sts of c us to m on-ch i p RO M[2];t he re c a n st il l b e a si g ni fi ca nt s a vi ng in I/O a nd ot he r c hi ps co mp ar ed t o a c on ve nt io nal mi cr op ro ce ss or b as ed c ir cu it. M o re e xa ctr e pl ac em en t fo r RO M d ev ic es c an b e o bt ai ne d in t he f o rm o f va ri an ts w i th 'pi gg y-ba ck'EP RO M(Er as ab le p ro gr am ma bl e ROM)s oc ke ts o rd e vi ce s w it h EP ROM i ns te ad o f R OM 。
(完整版)PLC英文文献+翻译

自动化专业本科毕业设计英文翻译学院(部):专业班级:学生姓名:指导教师:年月日Programmable Logic ControllerONE:PLC overviewProgrammable controller is the first in the late 1960s in the United States, then called PLC programmable logic controller (Programmable Logic Controller) is used to replace relays. For the implementation of the logical judgment, timing, sequence number, and other control functions. The concept is presented PLC General Motors Corporation. PLC and the basic design is the computer functional improvements, flexible, generic and other advantages and relay control system simple and easy to operate, such as the advantages of cheap prices combined controller hardware is standard and overall. According to the practical application of target software in order to control the content of the user procedures memory controller, the controller and connecting the accused convenient target.In the mid-1970s, the PLC has been widely used as a central processing unit microprocessor, import export module and the external circuits are used, large-scale integrated circuits even when the Plc is no longer the only logical (IC) judgment functions also have data processing, PID conditioning and data communications functions. International Electro technical Commission (IEC) standards promulgated programmable controller for programmable controller draft made the following definition : programmable controller is a digital electronic computers operating system, specifically for applications in the industrial design environment. It used programmable memory, used to implement logic in their internal storage operations, sequence control, timing, counting and arithmetic operations, such as operating instructions, and through digital and analog input and output, the control of various types of machinery or production processes. Programmable controller and related peripherals, and industrial control systems easily linked to form a whole, to expand its functional design. Programmable controller for the user, is a non-contact equipment, the procedures can be changed to change production processes. The programmable controller has become a powerful tool for factory automation, widely popular replication.Programmable controller is user-oriented industries dedicated control computer, with many distinctive features.First, high reliability, anti-interference capability;Second,programming visual, simple;Third, adaptability good;Fourth functional improvements, strong functional interface. TWO:History of PLCProgrammable Logic Controllers (PLC), a computing device invented by Richard E. Morley in 1968, have been widely used in industry including manufacturing systems, transportation systems, chemical process facilities, and many others. At that time, the PLC replaced the hardwired logic with soft-wired logic or so-called relay ladder logic (RLL), a programming language visually resembling the hardwired logic, and reduced thereby the configuration time from 6 months down to 6 days [Moody and Morley, 1999].Although PC based control has started to come into place, PLC based control will remain the technique to which the majority of industrial applications will adhere due to its higher performance, lower price, and superior reliability in harsh environments. Moreover, according to a study on the PLC market of Frost and Sullivan [1995], an increase of the annual sales volume to 15 million PLC per year with the hardware value of more than 8 billion US dollars has been predicted, though the prices of computing hardware is steadily dropping. The inventor of the PLC, Richard E Morley, fairly considers the PLC market as a 5-billion industry at the present time.Though PLCs are widely used in industrial practice, the programming of PLC based control systems is still very much relying on trial-and-error. Alike software engineering, PLC software design is facing the software dilemma or crisis in a similar way. Morley himself emphasized this aspect most forcefully by indicatingIf houses were built like software projects, a single woodpecker could d estroy civilization.”Particularly, practical problems in PLC programming are to eliminate software bugs and to reduce the maintenance costs of old ladderlogic programs. Though the hardware costs of PLC are dropping continuously, reducing the scan time of the ladder logic is still an issue in industry so that low-cost PLC can be used.In general, the productivity in generating PLC is far behind compared to other domains, for instance, VLSI design, where efficient computer aided design tools are in practice. Existent software engineering methodologies are not necessarily applicable to the PLC based software design because PLC-programming requires a simultaneous consideration of hardware and software. The software design becomes, thereby, more and more the major cost driver. In many industrial design projects, more than of the manpower allocated for the control system design and installation is scheduled for testing and debugging PLC programs.In addition, current PLC based control systems are not properly designed to support the growing demand for flexibility and reconfigurability of manufacturing systems. A further problem, impelling the need for a systematic design methodology, is the increasing software complexity in large-scale projects.The objective of this thesis is to develop a systematic software design methodology for PLC operated automation systems. The design methodology involves high-level description based on state transition models that treat automation control systems as discrete event systems, a stepwise design process, and set of design rules providing guidance and measurements to achieve a successful design. The tangible outcome of this research is to find a way to reduce the uncertainty in managing the control software development process, that is, reducing programming and debugging time and their variation, increasing flexibility of the automation systems, and enabling software reusability through modularity. The goal is to overcome shortcomings of current programming strategies that are based on the experience of the individual software developer. Three:now of PLCFrom the structure is divided into fixed PLC and Module PLC, the two kinds of PLC including CPU board, I/O board, display panel, memory block, power, these elements into a do not remove overall. Module type PLC including CPU module, I/O modules, memory, thepower modules, bottom or a frame, these modules can be according to certain rules combination configuration.In the user view, a detailed analysis of the CPU's internal unnecessary, but working mechanism of every part of the circuit. The CPU control works, by it reads CPU instruction, interprets the instruction and executes instructions. But the pace of work by shock signal control.Unit work under the controller command used in a digital or logic operations.In computing and storage register of computation result, it is also among the controller command and work. CPU speed and memory capacity is the important parameters fot PLC . its determines the PLC speed of work, IO PLC number and software capacity, so limits to control size.Central Processing Unit (CPU) is the brain of a PLC controller. CPU itself is usually one of the microcontrollers. Aforetime these were 8-bit microcontrollers such as 8051, and now these are 16-and 32-bit microcontrollers. Unspoken rule is that you’ll find mostly Hitachi and Fujicu microcontrollers in PLC controllers by Japanese makers, Siemens in European controllers, and Motorola microcontrollers in American ones. CPU also takes care of communication, interconnectedness among other parts of PLC controllers, program execution, memory operation, overseeing input and setting up of an output.System memory (today mostly implemented in FLASH technology) is used by a PLC for a process control system. Aside form. this operating system it also contains a user program translated foram ladder diagram to a binary form. FLASH memory contents can be changed only in case where user program is being changed. PLC controllers were used earlier instead of PLASH memory and have had EPROM memory instead of FLASH memory which had to be erased with UV lamp and programmed on programmers. With the use of FLASH technology this process was greatly shortened. Reprogramming a program memory is done through a serial cable in a program for application development.User memory is divided into blocks having special functions. Some parts of a memory are used for storing input and output status. The real status of an input is stored either as “1”or as “0”in a specific memory bit/each input or output has one corresponding bit in memory. Other parts of memory are used to store variable contents for variables used in used program. For example, time value, or counter value would be stored in this part of the memory.PLC controller can be reprogrammed through a computer (usual way), but also through manual programmers (consoles). This practically means that each PLC controller can programmed through a computer if you have the software needed for programming. Today’s transmission computers are ideal for reprogramming a PLC controller in factory itself. This is of great importance to industry. Once the system is corrected, it is also important to read the right program into a PLC again. It is also good to check from time to time whether program in a PLC has not changed. This helps to avoid hazardous situations in factory rooms (some automakers have established communication networks which regularly check programs in PLC controllers to ensure execution only of good programs).Almost every program for programming a PLC controller possesses various useful options such as: forced switching on and off of the system input/outputs (I/O lines), program follow up in real time as well as documenting a diagram. This documenting is necessary to understand and define failures and malfunctions. Programmer can add remarks, names of input or output devices, and comments that can be useful when finding errors, or with system maintenance. Adding comments and remarks enables any technician (and not just a person who developed the system) to understand a ladder diagram right away. Comments and remarks can even quote precisely part numbers if replacements would be needed. This would speed up a repair of any problems that come up due to bad parts. The old way was such that a person who developed a system had protection on the program, so nobody aside from this person could understand how it was done. Correctly documented ladder diagram allows any technician to understand thoroughly how system functions.Electrical supply is used in bringing electrical energy to central processing unit. Most PLC controllers work either at 24 VDC or 220V AC. On some PLC controllers you’ll find electrical supply as a separatemodule. Those are usually bigger PLC controllers, while small and medium series already contain the supply module. User has to determine how much current to take from I/O module to ensure that electrical supply provides appropriate amount of current. Different types of modules use different amounts of electrical current.This electrical supply is usually not used to start external input or output. User has to provide separate supplies in starting PLC controller inputs because then you can ensure so called “pure” supply for the PLC controller. With pure supply we mean supply where industrial environment can not affect it damagingly. Some of the smaller PLC controllers supply their inputs with voltage from a small supply source already incorporated into a PLC.Four:PLC design criteriaA systematic approach to designing PLC software can overcome deficiencies in the traditional way of programming manufacturing control systems, and can have wide ramifications in several industrial applications. Automation control systems are modeled by formal languages or, equivalently, by state machines. Formal representations provide a high-level description of the behavior of the system to be controlled. State machines can be analytically evaluated as to whether or not they meet the desired goals. Secondly, a state machine description provides a structured representation to convey the logical requirements and constraints such as detailed safety rules. Thirdly, well-defined control systems design outcomes are conducive to automatic code generation- An ability to produce control software executable on commercial distinct logic controllers can reduce programming lead-time and labor cost. In particular, the thesis is relevant with respect to the following aspects.In modern manufacturing, systems are characterized by product and process innovation, become customer-driven and thus have to respond quickly to changing system requirements. A major challenge is therefore to provide enabling technologies that can economically reconfigure automation control systems in response to changing needs and new opportunities. Design and operational knowledge can be reused inreal-time, therefore, giving a significant competitive edge in industrial practice.Studies have shown that programming methodologies in automation systems have not been able to match rapid increase in use of computing resources. For instance, the programming of PLC still relies on a conventional programming style with ladder logic diagrams. As a result, the delays and resources in programming are a major stumbling stone for the progress of manufacturing industry. Testing and debugging may consume over 50% of the manpower allocated for the PLC program design. Standards [IEC 60848, 1999; IEC-61131-3, 1993; IEC 61499, 1998; ISO 15745-1, 1999] have been formed to fix and disseminate state-of-the-art design methods, but they normally cannot participate in advancing the knowledge of efficient program and system design.A systematic approach will increase the level of design automation through reusing existing software components, and will provide methods to make large-scale system design manageable. Likewise, it will improve software quality and reliability and will be relevant to systems high security standards, especially those having hazardous impact on the environment such as airport control, and public railroads.The software industry is regarded as a performance destructor and complexity generator. Steadily shrinking hardware prices spoils the need for software performance in terms of code optimization and efficiency. The result is that massive and less efficient software code on one hand outpaces the gains in hardware performance on the other hand. Secondly, software proliferates into complexity of unmanageable dimensions; software redesign and maintenance-essential in modern automation systems-becomes nearly impossible. Particularly, PLC programs have evolved from a couple lines of code 25 years ago to thousands of lines of code with a similar number of 1/O points. Increased safety, for instance new policies on fire protection, and the flexibility of modern automation systems add complexity to the program design process. Consequently, the life-cycle cost of software is a permanently growing fraction of the total cost. 80-90% of these costs are going into software maintenance, debugging, adaptation and expansion to meet changing needs.Today, the primary focus of most design research is based on mechanical or electrical products. One of the by-products of this proposed research is to enhance our fundamental understanding of design theory and methodology by extending it to the field of engineering systems design. A system design theory for large-scale and complex system is not yet fully developed. Particularly, the question of how to simplify a complicated or complex design task has not been tackled in a scientific way. Furthermore, building a bridge between design theory and the latest epistemological outcomes of formal representations in computer sciences and operations research, such as discrete event system modeling, can advance future development in engineering design.From a logical perspective, PLC software design is similar to the hardware design of integrated circuits. Modern VLSI designs are extremely complex with several million parts and a product development time of 3 years [Whitney, 1996]. The design process is normally separated into a component design and a system design stage. At component design stage, single functions are designed and verified. At system design stage, components are aggregated and the whole system behavior and functionality is tested through simulation. In general, a complete verification is impossible. Hence, a systematic approach as exemplified for the PLC program design may impact the logical hardware design.可编程控制器一、PLC概述可编程控制器是60年代末在美国首先出现的,当时叫可编程逻辑控制器PLC(Programmable Logic Controller),目的是用来取代继电器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Programmable logic controllerA programmable logic controller (PLC) or programmable controller is a digital computer used for automation of electromechanical processes, such as control of machinery on factory assembly lines, amusement rides, or lighting fixtures. PLCs are used in many industries and machines. Unlike general-purpose computers, the PLC is designed for multiple inputs and output arrangements, extended temperature ranges, immunity to electrical noise, and resistance to vibration and impact. Programs to control machine operation are typically stored in battery-backed or non-volatile memory. A PLC is an example of a real time system since output results must be produced in response to input conditions within a bounded time, otherwise unintended operation will result.1.HistoryThe PLC was invented in response to the needs of the American automotive manufacturing industry. Programmable logic controllers were initially adopted by the automotive industry where software revision replaced the re-wiring of hard-wired control panels when production models changed.Before the PLC, control, sequencing, and safety interlock logic for manufacturing automobiles was accomplished using hundreds or thousands of relays, cam timers, and drum sequencers and dedicated closed-loop controllers. The process for updating such facilities for the yearly model change-over was very time consuming and expensive, as electricians needed to individually rewire each and every relay.In 1968 GM Hydramatic (the automatic transmission division of General Motors) issued a request for proposal for an electronic replacement for hard-wired relay systems. The winning proposal came from Bedford Associates of Bedford, Massachusetts. The first PLC, designated the 084 because it was Bedford Associates' eighty-fourth project, was the result. Bedford Associates started a new company dedicated to developing, manufacturing, selling, and servicing this new product: Modicon, which stood for MOdular DIgital CONtroller. One of the people who worked on that project was Dick Morley, who is considered to be the "father" of the PLC. The Modicon brand was sold in 1977 to Gould Electronics, and later acquired by German Company AEG and then by French Schneider Electric, the current owner. One of the very first 084 models built is now on display at Modicon's headquarters in North Andover, Massachusetts. It was presented to Modicon by GM, when the unit was retired after nearly twenty years of uninterrupted service. Modicon used the 84moniker at the end of its product range until the 984 made its appearance.The automotive industry is still one of the largest users of PLCs.2.DevelopmentEarly PLCs were designed to replace relay logic systems. These PLCs were programmed in "ladder logic", which strongly resembles a schematic diagram of relay logic. This program notation was chosen to reduce training demands for the existing technicians. Other early PLCs used a form of instruction list programming, based on a stack-based logic solver.Modern PLCs can be programmed in a variety of ways, from ladder logic to more traditional programming languages such as BASIC and C. Another method is State Logic, a very high-level programming language designed to program PLCs based on state transition diagrams.Many early PLCs did not have accompanying programming terminals that were capable of graphical representation of the logic, and so the logic was instead represented as a series of logic expressions in some version of Boolean format, similar to Boolean algebra. As programming terminals evolved, it became more common for ladder logic to be used, for the aforementioned reasons. Newer formats such as State Logic and Function Block (which is similar to the way logic is depicted when using digital integrated logic circuits) exist, but they are still not as popular as ladder logic.A primary reason for this is that PLCs solve the logic in a predictable and repeating sequence, and ladder logic allows the programmer (the person writing the logic) to see any issues with the timing of the logic sequence more easily than would be possible in other formats.2.1ProgrammingEarly PLCs, up to the mid-1980s, were programmed using proprietary programming panels or special-purpose programming terminals, which often had dedicated function keys representing the various logical elements of PLC programs. Programs were stored on cassette tape cartridges. Facilities for printing and documentation were very minimal due to lack of memory capacity. The very oldest PLCs used non-volatile magnetic core memory.More recently, PLCs are programmed using application software on personal computers. The computer is connected to the PLC through Ethernet, RS-232, RS-485 or RS-422 cabling. The programming software allows entry and editing of the ladder-style logic. Generally the software provides functions for debugging andtroubleshooting the PLC software, for example, by highlighting portions of the logic to show current status during operation or via simulation. The software will upload and download the PLC program, for backup and restoration purposes. In some models of programmable controller, the program is transferred from a personal computer to the PLC though a programming board which writes the program into a removable chip such as an EEPROM or EPROM.3.FunctionalityThe functionality of the PLC has evolved over the years to include sequential relay control, motion control, process control, distributed control systems and networking. The data handling, storage, processing power and communication capabilities of some modern PLCs are approximately equivalent to desktop computers. PLC-like programming combined with remote I/O hardware, allow a general-purpose desktop computer to overlap some PLCs in certain applications. Regarding the practicality of these desktop computer based logic controllers, it is important to note that they have not been generally accepted in heavy industry because the desktop computers run on less stable operating systems than do PLCs, and because the desktop computer hardware is typically not designed to the same levels of tolerance to temperature, humidity, vibration, and longevity as the processors used in PLCs. In addition to the hardware limitations of desktop based logic, operating systems such as Windows do not lend themselves to deterministic logic execution, with the result that the logic may not always respond to changes in logic state or input status with the extreme consistency in timing as is expected from PLCs. Still, such desktop logic applications find use in less critical situations, such as laboratory automation and use in small facilities where the application is less demanding and critical, because they are generally much less expensive than PLCs.In more recent years, small products called PLRs (programmable logic relays), and also by similar names, have become more common and accepted. These are very much like PLCs, and are used in light industry where only a few points of I/O (i.e. a few signals coming in from the real world and a few going out) are involved, and low cost is desired. These small devices are typically made in a common physical size and shape by several manufacturers, and branded by the makers of larger PLCs to fill out their low end product range. Popular names include PICO Controller, NANO PLC, and other names implying very small controllers. Most of these have between 8 and 12 digital inputs, 4 and 8 digital outputs, and up to 2 analog inputs. Size is usuallyabout 4" wide, 3" high, and 3" deep. Most such devices include a tiny postage stamp sized LCD screen for viewing simplified ladder logic (only a very small portion of the program being visible at a given time) and status of I/O points, and typically these screens are accompanied by a 4-way rocker push-button plus four more separate push-buttons, similar to the key buttons on a VCR remote control, and used to navigate and edit the logic. Most have a small plug for connecting via RS-232 or RS-485 to a personal computer so that programmers can use simple Windows applications for programming instead of being forced to use the tiny LCD and push-button set for this purpose. Unlike regular PLCs that are usually modular and greatly expandable, the PLRs are usually not modular or expandable, but their price can be two orders of magnitude less than a PLC and they still offer robust design and deterministic execution of the logic.4.PLC Topics4.1.FeaturesThe main difference from other computers is that PLCs are armored for severe conditions (such as dust, moisture, heat, cold) and have the facility for extensive input/output (I/O) arrangements. These connect the PLC to sensors and actuators. PLCs read limit switches, analog process variables (such as temperature and pressure), and the positions of complex positioning systems. Some use machine vision. On the actuator side, PLCs operate electric motors, pneumatic or hydraulic cylinders, magnetic relays, solenoids, or analog outputs. The input/output arrangements may be built into a simple PLC, or the PLC may have external I/O modules attached to a computer network that plugs into the PLC.4.2System scaleA small PLC will have a fixed number of connections built in for inputs and outputs. Typically, expansions are available if the base model has insufficient I/O.Modular PLCs have a chassis (also called a rack) into which are placed modules with different functions. The processor and selection of I/O modules is customised for the particular application. Several racks can be administered by a single processor, and may have thousands of inputs and outputs. A special high speed serial I/O link is used so that racks can be distributed away from the processor, reducing the wiring costs for large plants.4.3User interfacePLCs may need to interact with people for the purpose of configuration, alarmreporting or everyday control.A simple system may use buttons and lights to interact with the user. Text displays are available as well as graphical touch screens. More complex systems use a programming and monitoring software installed on a computer, with the PLC connected via a communication interface.4.4CommunicationsPLCs have built in communications ports, usually 9-pin RS-232, but optionally EIA-485 or Ethernet. Modbus, BACnet or DF1 is usually included as one of the communications protocols. Other options include various fieldbuses such as DeviceNet or Profibus. Other communications protocols that may be used are listed in the List of automation protocols.Most modern PLCs can communicate over a network to some other system, such as a computer running a SCADA (Supervisory Control And Data Acquisition) system or web browser.PLCs used in larger I/O systems may have peer-to-peer (P2P) communication between processors. This allows separate parts of a complex process to have individual control while allowing the subsystems to co-ordinate over the communication link. These communication links are also often used for HMI devices such as keypads or PC-type workstations.4.5ProgrammingPLC programs are typically written in a special application on a personal computer, then downloaded by a direct-connection cable or over a network to the PLC. The program is stored in the PLC either in battery-backed-up RAM or some other non-volatile flash memory. Often, a single PLC can be programmed to replace thousands of relays.Under the IEC 61131-3 standard, PLCs can be programmed using standards-based programming languages. A graphical programming notation called Sequential Function Charts is available on certain programmable controllers. Initially most PLCs utilized Ladder Logic Diagram Programming, a model which emulated electromechanical control panel devices (such as the contact and coils of relays) which PLCs replaced. This model remains common today.IEC 61131-3 currently defines five programming languages for programmable control systems: FBD (Function block diagram), LD (Ladder diagram), ST (Structured text, similar to the Pascal programming language), IL (Instruction list,similar to assembly language) and SFC (Sequential function chart). These techniques emphasize logical organization of operations.While the fundamental concepts of PLC programming are common to all manufacturers, differences in I/O addressing, memory organization and instruction sets mean that PLC programs are never perfectly interchangeable between different makers. Even within the same product line of a single manufacturer, different models may not be directly compatible.5.PLC compared with other control systemsPLCs are well-adapted to a range of automation tasks. These are typically industrial processes in manufacturing where the cost of developing and maintaining the automation system is high relative to the total cost of the automation, and where changes to the system would be expected during its operational life. PLCs contain input and output devices compatible with industrial pilot devices and controls; little electrical design is required, and the design problem centers on expressing the desired sequence of operations. PLC applications are typically highly customized systems so the cost of a packaged PLC is low compared to the cost of a specific custom-built controller design. On the other hand, in the case of mass-produced goods, customized control systems are economic due to the lower cost of the components, which can be optimally chosen instead of a "generic" solution, and where the non-recurring engineering charges are spread over thousands or millions of units.For high volume or very simple fixed automation tasks, different techniques are used. For example, a consumer dishwasher would be controlled by an electromechanical cam timer costing only a few dollars in production quantities.A microcontroller-based design would be appropriate where hundreds or thousands of units will be produced and so the development cost (design of power supplies, input/output hardware and necessary testing and certification) can be spread over many sales, and where the end-user would not need to alter the control. Automotive applications are an example; millions of units are built each year, and very few end-users alter the programming of these controllers. However, some specialty vehicles such as transit busses economically use PLCs instead of custom-designed controls, because the volumes are low and the development cost would be uneconomic.Very complex process control, such as used in the chemical industry, may require algorithms and performance beyond the capability of even high-performance PLCs. Very high-speed or precision controls may also require customized solutions; forexample, aircraft flight controls.Programmable controllers are widely used in motion control, positioning control and torque control. Some manufacturers produce motion control units to be integrated with PLC so that G-code (involving a CNC machine) can be used to instruct machine movements.PLCs may include logic for single-variable feedback analog control loop, a "proportional, integral, derivative" or "PID controller". A PID loop could be used to control the temperature of a manufacturing process, for example. Historically PLCs were usually configured with only a few analog control loops; where processes required hundreds or thousands of loops, a distributed control system (DCS) would instead be used. As PLCs have become more powerful, the boundary between DCS and PLC applications has become less distinct.PLCs have similar functionality as Remote Terminal Units. An RTU, however, usually does not support control algorithms or control loops. As hardware rapidly becomes more powerful and cheaper, RTUs, PLCs and DCSs are increasingly beginning to overlap in responsibilities, and many vendors sell RTUs with PLC-like features and vice versa. The industry has standardized on the IEC 61131-3 functional block language for creating programs to run on RTUs and PLCs, although nearly all vendors also offer proprietary alternatives and associated development environments.6.Digital and analog signalsDigital or discrete signals behave as binary switches, yielding simply an On or Off signal (1 or 0, True or False, respectively). Push buttons, limit switches, and photoelectric sensors are examples of devices providing a discrete signal. Discrete signals are sent using either voltage or current, where a specific range is designated as On and another as Off. For example, a PLC might use 24 V DC I/O, with values above 22 VDC representing On, values below 2VDC representing Off, and intermediate values undefined. Initially, PLCs had only discrete I/O.Analog signals are like volume controls, with a range of values between zero and full-scale. These are typically interpreted as integer values (counts) by the PLC, with various ranges of accuracy depending on the device and the number of bits available to store the data. As PLCs typically use 16-bit signed binary processors, the integer values are limited between -32,768 and +32,767. Pressure, temperature, flow, and weight are often represented by analog signals. Analog signals can use voltage orcurrent with a magnitude proportional to the value of the process signal. For example, an analog 0 - 10 V input or 4-20 mA would be converted into an integer value of 0 - 32767.。