《自动控制原理》部分中英文词汇对照表(英文解释)
自动控制原理常用名词解释
词汇第一章自动控制 ( Automatic Control) :是指在没有人直接参与的条件下,利用控制装置使被控对象的某些物理量(或状态)自动地按照预定的规律去运行。
开环控制 ( open loop control ):开环控制是最简单的一种控制方式。
它的特点是,按照控制信息传递的路径,控制量与被控制量之间只有前向通路而没有反馈通路。
也就是说,控制作用的传递路径不是闭合的,故称为开环。
闭环控制 ( closed loop control) :凡是将系统的输出量反送至输入端,对系统的控制作用产生直接的影响,都称为闭环控制系统或反馈控制 Feedback Control 系统。
这种自成循环的控制作用,使信息的传递路径形成了一个闭合的环路,故称为闭环。
复合控制 ( compound control ):是开、闭环控制相结合的一种控制方式。
被控对象:指需要给以控制的机器、设备或生产过程。
被控对象是控制系统的主体,例如火箭、锅炉、机器人、电冰箱等。
控制装置则指对被控对象起控制作用的设备总体,有测量变换部件、放大部件和执行装置。
被控量 (controlled variable ) :指被控对象中要求保持给定值、要按给定规律变化的物理量。
被控量又称输出量、输出信号。
给定值 (set value ) :是作用于自动控制系统的输入端并作为控制依据的物理量。
给定值又称输入信号、输入指令、参考输入。
干扰 (disturbance) :除给定值之外,凡能引起被控量变化的因素,都是干扰。
干扰又称扰动。
第二章数学模型 (mathematical model) :是描述系统内部物理量(或变量)之间动态关系的数学表达式。
传递函数 ( transfer function) :线性定常系统在零初始条件下,输出量的拉氏变换与输入量的拉氏变换之比,称为传递函数。
零点极点 (z ero and pole) :分子多项式的零点(分子多项式的根)称为传递函数的零点;分母多项式的零点(分母多项式的根)称为传递函数的极点。
自控中英对照
Z-transform, Inverse Z Transform z变换, z反变换Stability, Dynamic Performance, Steady-state Errors, 稳定性,动态性能,稳态误差the continuous-time state equation, the continuous-time system (signal)连续状态方程,连续系统(信号)the discrete time state equation, the discrete-time system (signal)离散状态方程,离散系统(信号)initial state of the system 系统的初始状态the solution of this homogeneous (non-homogeneous) state equation齐次(非齐次)状态方程的解the sample time 采样时间the parameters 参数the condition 条件Controllable, controllability 可控的,可控性Observerable, observerablity 可观的,可观性plot the figure 画图obtain the closed-loop impulsive transfer function获得闭环系统的脉冲传递函数determine the stable range of k 判定k的稳定区间nonlinear system非线性系统the describing function of nonlinear part非线性部分的描述函数plot the curves 画出轨迹self-oscillation 自激振荡the input signal 输入信号establish the equations of switching lines and plot the phase portrait of system建立方程的切换线方程,并绘制相轨迹Obtain all singular points and their types获得所有的奇点并判断它们的类型the transfer function of the system 系统的传递函数Controllable and Observable Canonical Form 可控和可观标准型Diagonal Canonical Form 对角线标准型Jordan Canonical Form 约当标准型state space expression 状态空间表达式the State Variables Diagram 状态空间结构图state feedback 状态反馈state observer状态观测器the expected poles of the state feedback system 状态反馈系统的期望极点the expected poles of the designed state observer 设计的状态观测器的期望极点1。
自动控制原理重点英文单词+汉语翻译
Closed-loop control systems 闭环控制系统Open-loop control systems开环控制系统Process 过程Linear system线性系统Nonlinear system非线性系统Continuous system 连续系统Discrete system离散系统Stability 稳定性Steady-state performance 稳态性能Transient performance 暂态特性mathematical model 数学模型differential equations 微分方程Transfer function传递函数zeros and poles of transfer function传递函数的零极点Inverse proportion part 比例环节Inertia part惯性环节Integral part 积分环节Derivative part 微分环节Vibrate part震荡环节Delay part 滞后环节Block diagram (Equivalent transformation)方框图(Unit) negative (positive) feedback loop 负(正)反馈回路Mason formula 梅逊公式disturbance 干扰Step signal 阶跃信号Ramp signal(speed function signal) 斜波信号Parabola signal(acceleration signal) 加速度信号pulse signal脉冲信号Sinusoidal signal 正弦信号Delay time延迟时间Rise time 上升时间Peak time峰值时间Settling time 稳定时间Percent overshoot超调量Steady-state error稳态误差position error coefficient Kp speed error coefficient Kv acceleration error coefficient Kafirst-order system一阶系统S econd-order system 二阶系统high-order system 高阶系统Dominant pole主导极点Underdamped欠阻尼Critically Damped临界阻尼Overdamped 过阻尼Undamped无阻尼的Routh-Hurwitz stability criterion劳斯稳定性判据R outh array 劳斯表Character equation 特征方程root locus 根轨迹open-loop zeros and poles 开环零极点Magnitude and angle requirements of root locus幅值与相角frequency character 频率特征(inverse) Laplace transformation 拉普拉斯(反)变换Nyquist plot奈奎斯特图Bode diagram波德图Logarithmic magnitude frequency character对数幅值频率特性Logarithmic phase frequency character对数相频特征Nyquist stability criterion奈奎斯特稳定判据cutoff frequency 剪切频率Phase margin 相位裕量Gain margin 增益裕量Cutoff frequencyCascade phase-lead compensation串联超前矫正Cascade phase-lag compensation 串联滞后校正Cascade phase-lag and -lead compensation串联滞后-超前矫正sample control system 采样控制系统digital control system 数控系统discrete control system离散控制系统Shannon sampling theorem 香农采样定理Zero-order hold 零阶保持sampling period 采样周期Sampling frequency 采样频率Z-transform z变换Z-inverse transform z逆变换pulse transfer function脉冲传递函数bilinear transform双线性变换。
自动控制原理专业词汇中英文对照

自动控制原理专业词汇中英文对照中文 英文自动控制 automatic control;cybernation 自动控制系统 automatic control system自动控制理论 automatic control theory经典控制理论 classical control theory现代控制理论 modern control theory智能控制理论 intelligent control theory 开环控制 open-loop control闭环控制 closed-loop control输入量 input输出量 output给定环节 given unit/element比较环节 comparing unit/element放大环节 amplifying unit/element执行环节 actuating unit/element控制环节 controlling unit/element被控对象 (controlled) plant反馈环节 feedback unit/element控制器 controller扰动/干扰 perturbance/disturbance前向通道 forward channel反馈通道 feedback channel 恒值控制系统 constant control system随动控制系统 servo/drive control system 程序控制系统 programmed control system 连续控制系统 continuous control system离散控制系统 discrete control system线性控制系统 linear control system非线性控制系统 nonlinear control system定常/时不变控制系统 time-invariant control system 时变控制系统 time-variant control system 稳定性 stability快速性 rapidity准确性 accuracy数学模型 mathematical model微分方程 differential equation非线性特性 nonlinear characteristic线性化处理 linearization processing泰勒级数 Taylor series传递函数 transfer function比例环节 proportional element积分环节 integrating element一阶惯性环节 first order inertial element二阶惯性环节 second order inertial element二阶震荡环节 second order oscillation element 微分环节 differentiation element一阶微分环节 first order differentiation element二阶微分环节 second order differentiation element 延迟环节 delay element动态结构图 dynamic structure block串联环节 serial unit并联环节 parallel unit信号流图 signal flow graph梅逊增益公式 Mason’s gain formula时域分析法 time domain analysis method性能指标 performance index阶跃函数 step function斜坡函数 ramp function抛物线函数 parabolic function /acceleration function 冲击函数 impulse function正弦函数 sinusoidal function动态/暂态响应 transient response静态/稳态响应 steady-state response 延迟时间 delay time上升时间 rise time峰值时间 peak time调节时间 settling time最大超调量 maximum overshoot稳态误差 steady-state error无阻尼 undamping欠阻尼 underdamping过阻尼 overdamping特征根 eigen root极点 pole零点 zero实轴 real axis虚轴 imaginary axis 稳态/静态分量 steady-state component瞬态/暂态/动态分量 transient component 运动模态 motion mode衰减 attenuation系数 coefficient初相角 initial phase angle响应曲线 response curve主导极点 dominant pole 劳斯稳定判据 Routh stability criterion S平面 S plane胡尔维茨稳定判据 Hurwitz stability criterion 测量误差 measurement error扰动误差 agitation error结构性误差 structural error偏差 deviation根轨迹 root locus 常规根轨迹 routine root locus根轨迹方程 root locus equation 幅值 magnitude幅角 argument对称性 symmetry分离点 separation/break away point会合点 meeting/break-in point渐近线 asymptote出射角 emergence angle/angle of departure入射角 incidence angle/angle of arrival 广义根轨迹 generalized root locus零度根轨迹 zero degree root locus 偶极子 dipole/zero-pole pair 频域分析法 frequency-domain analysis method 频率特性 frequency characteristic极坐标系 polar coordinate system直角坐标系 rectangular coordinate system幅频特性 magnitude-frequency characteristic相频特性 phase-frequency characteristic 幅相频率特性 magnitude-phase frequency characteristic 最小相位系统 minimum phase system非最小相位系统 nonminimum phase system奈奎斯特稳定判据 Nyquist stability criterion 伯德定理 Bode theorem稳定裕度 stability margin幅值裕度 magnitude margin 相位/相角裕度 phase margin对数幅频特性 log magnitude-frequency characteristic 无阻尼自然震荡角频率 undamped oscillation angular frequency 阻尼震荡角频率 damped oscillation angular frequency 阻尼角 damping angle带宽频率 bandwidth frequency 穿越/截止频率 crossover/cutoff frequency 谐振峰值 resonance peak系统校正 system compensation超前校正 lead compensation滞后校正 lag compensation自激震荡 self-excited oscillation死区特性 dead zone characteristic饱和特性 saturation characteristic间隙特性 backlash characteristic描述函数法 describing function method相平面法 phase plane method 采样控制系统 sampling control system数字控制系统 digital control system频谱 frequency spectrum 采样定理 sampling theorem信号重现 signal recurrence拉氏变换 Laplace transformZ变换 Z transform终值定理 final-value theorem差分方程 difference equation迭代法 iterative method 脉冲传递函数 pulse transfer function零阶保持器 zero-order holder映射 mapping方框图 block diagram伯德图 Bode diagram特征方程 characteristic equation可控性 controllability临界阻尼 critical damping阻尼常数 damping constant阻尼比 damping ratio初始状态 initial state初值定理 initial-value theorem反Z变换 inverse Z-transformation负反馈 negative feedback正反馈 positive feedback 尼科尔斯图 Nichols chart部分分式展开 partial fraction expansion 幅角原理 argument principle相对稳定性 relative stability共振频率 resonant frequency劳斯表 Routh tabulation/array奇点 singularity渐进稳定性 asymptotic stability控制精度 control accuracy临界稳定性 critical stability耦合 coupling解耦 decoupling比例积分微分调节器 proportional integral derivative regulator(PID) 串联校正 series/cascade compensation 单输入单输出 single input single output(SISO)多输入多输出 multi input multi output(MIMO)低通滤波器 low pass filter非线性系统 nonlinear system复合控制 compound control衰减振荡 damped oscillation主反馈 monitoring feedback 转折(交接)频率 break frequency稳定焦点/节点 stable focus/node。
自动控制原理英文词汇索引
Signal input single output SISO 单输入单输出Dynamic system 动态系统Multivariable control 多变量控制Multi input and multi output 多输入多输出Root locus method 根轨迹方法Time domain 时域Disturbance 干扰Frequency domain 频域Stochastic system 随机系统Phase 相位Uncertainty 不确定性Distributed parameter system 分布参数系统Discrete system 离散系统Robust control 鲁棒控制System identification 系统辨识Adaptive control 自适应控制Simulation 仿真Nonlinear 非线性Symbolic computation 符号计算Toolbox 工具箱Numerical computation 数值计算Diagonal canonical form 对角线规范形Jordan canonical form 约当规范形Controlled system 受控系统、被控系统Ordinary differential equation 常微分方程Derivative 导数Time-invariant system 定常系统、时不变系统Matrix 矩阵Continuous-time system 连续系统、连续时间系统Time-varying system 时变系统、非定常系统Output equation 输出方程Mathematic model 数学模型Linear system 线性系统Vector 向量State 状态State equation 状态方程State trace 状态轨迹State space model 状态空间模型Transfer function 传递函数Inverted pendulum 倒立摆Diagonal matrix 对角线矩阵Fourier transformation 傅里叶变换Inertial element 惯性环节Block diagonal matrix 块对角矩阵Linearization 线性化Phase variable 相变量Strictly proper rational function 严格真有理函数Companior matrix 友矩阵Jordan matrix 约当矩阵Adjoint matrix 伴随矩阵Non-singurler matrix 非奇异矩阵、可逆矩阵Generality eigenvector 广义特征向量Canonical form 规范形、标准形、典范形Geometric multiple number 几何重数Algebraic multiple number 代数重数Characteristic polynomial 特征多项式Characteristic equation 特征方程Eigenvecto 特征向量rLinear transformation 线性变换Rank 秩Parallel connection 并行联接Transfer function matrix 传递函数矩阵Series connection 串联联接Feedback connection 反馈联接Laplace transformation 拉普拉斯变换Rational matrix function 有理矩阵函数Composition system 组合系统Analog to Digital converter A/D 转换、数模转换Digital to Analog converter D/A 转换、数模转换z transformation z变换sampled system 采样系统difference equation 差分方程discrete-time system 离散系统、离散时间系统delay 延迟initial time 初始时间initial state 初始状态polynomial 多项式non-homogenerous state equation 非齐次状态方程step signal 阶跃信号matrix exponent function 矩阵指数函数convolution 卷积zero-input response 零输入响应zero-state response 零状态响应impulse response 脉冲响应impulse signal 脉冲信号homogenerous 齐次性homogenerous state equation 齐次状态方程output response 输出响应state transistion matrix 状态转移矩阵Cayley-Hamilton Theorem 凯莱-哈密顿定理Momic polynomial 首一多项式Minimal polynomial 最小多项式Recursive algorithm 递推算法Gram matrix 格拉姆矩阵Functional linear independence 函数线性无关Functional linear denpendence 函数线性相关Modality criterion 模态判据Controllability 能控性、可控性Controllability Matrix 能控性矩阵Output controllability 输出能控性Rank criterion 秩判据State controllability 状态能控性Observability 能观测性、可观测性Observability matrix 能观性矩阵Observability criterion 能观性判据Reachability 能达性、可达性Duality 对偶性Structural decomposition 结构分解Zero 零点Zero-pole cancel 零极点相消Subspace 子空间Subsystem 子系统Luenberger controllability canonical form 龙伯格能控规范形Observability canonical form 能观规范形controllability canonical form 能控规范形controllability index 能控性指数Wonham controllability canonical form 旺纳姆能控规范形System realization 系统实现Minimal realization 最小实现Definite sign 定号性Norm 范数Non-positive definite matrix 非正定矩阵Euclidean norm 2-norm 欧几里德范数、2范数Equilibrium state 平衡点Input-output stability 输入输出稳定性Stability 稳定性Consistent stability 一致稳定Bounded-input bounded-output stability BIBO stability 有界输入有界输出稳定性State stability 状态稳定性Algebraic equation 代数方程Symmetry matrix 对称矩阵Quadratic function 二次型函数Non-negative definite matrix 非负定矩阵Negative definite matrix 负定矩阵Asymptotic stability 渐进稳定Sylvester Theorem 赛尔维斯特定理Stability criterion 稳定判据Jacobi matrix 雅可比矩阵Positive-definite matrix 正定矩阵Output feedback 输出反馈State feedback 状态反馈Pole assignment 极点配置System synthesis 系统综合Stable control 镇定控制Compensator decouple 补偿器解耦Decouple 解耦Observer 观测器Reduction-dimension observer 降维观测器Full-dimension observer 全维观测器State estimation 状态观测器State observating error 状态观测器误差State observatory 状态观测器。
控制理论术语中英文对照表
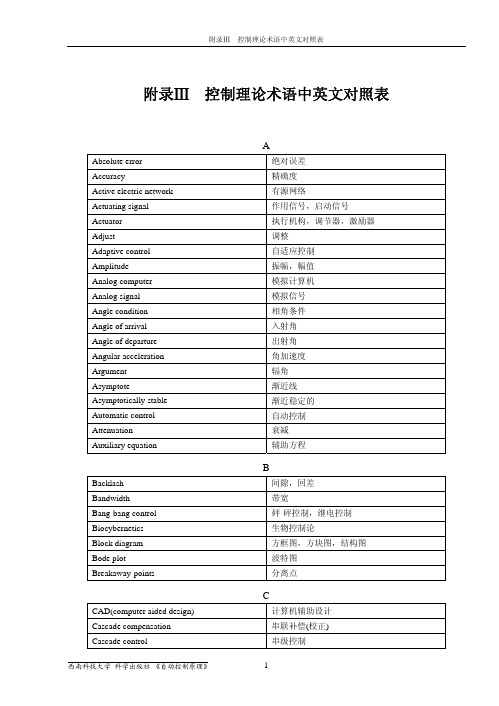
附录Ⅲ 控制理论术语中英文对照表AAbsolute error 绝对误差Accuracy 精确度Active electric network 有源网络Actuating signal 作用信号,启动信号Actuator 执行机构,调节器,激励器Adjust 调整Adaptive control 自适应控制Amplitude 振幅,幅值Analog computer 模拟计算机Analog signal 模拟信号Angle condition 相角条件Angle of arrival 入射角Angle of departure 出射角Angular acceleration 角加速度Argument 辐角Asymptote 渐近线Asymptotically stable 渐近稳定的Automatic control 自动控制Attenuation 衰减Auxiliary equation 辅助方程BBacklash 间隙,回差Bandwidth 带宽Bang-bang control 砰-砰控制,继电控制Biocybernetics 生物控制论Block diagram 方框图,方块图,结构图Bode plot 波特图Breakaway-points 分离点CCAD(computer aided design) 计算机辅助设计Cascade compensation 串联补偿(校正)Cascade control 串级控制Channel 通道Characteristic equation 特征方程Classical control theory 古典控制理论Closed loop control system 闭环控制系统Closed loop frequency response 闭环频率响应Closed loop pole 闭环极点Closed loop zero 闭环零点Combinational control system 复合控制系统Comparator 比较器Comparing element 比较元件,比较环节Compound control 复合控制Compensation 补偿,校正Complex plane 复平面Conditional stability 条件稳定Configuration 结构,配置,方案,组态Constant M loci 等M圆Continuous system 连续系统Controlled variable 被控变量Control system 控制系统Control valve 调节阀Controllability 可控性,能控性Corner frequency 转折频率,交接频率Correcting unit 校正器Correction 校正Coupling 耦合Criterion 判据,准则Critical damping 临界阻尼Cut-off frequency 截止频率Cybernetics 控制论DDamped natural frequency 有阻尼自然频率Damper 阻尼器Damping factor 阻尼系数Damping ratio 阻尼比Dead band 死区Dead time 纯延迟,延迟时间Decomposition 分解Delay 滞后Delay element 滞后环节Derivation action 微分作用Derivative control 微分控制Desired value 预期值,期望值Deviation 偏差Differencing junction 比较点Differential equations 微分方程Digital computer 数字计算机Discrete-data system 离散数据系统Disturbance 扰动,干扰Dominant pole 主导极点Duality 对偶性Dynamic equation 动态方程Dynamic error 动态误差Dynamic process 动态过程EEquilibrium state 平衡状态Eigenvalue 特征值Eigenvector 特征向量Error 误差Error coefficient 误差系数Error signal 误差信号Even symmetry 偶对称Exponential 指数,指数的,幂的Extremum 极值FFeedback 反馈Feedback control 反馈控制Feedback element 反馈环节Feedback path 反馈通道Feedforward 前馈Final value 终值First-order system 一阶系统Forward path 前向通道Frequency 频率Frequency domain 频域Frequency response 频率响应Frequency response characteristic 频率响应特性GGain 增益Gain margin 增益裕度,幅值裕度HHarmonic response 谐波响应Holder 保持器Homogeneous equation 齐次方程Hurwitz determinant 赫尔维茨行列式Hysteresis error 回差IIdealized system 理想化系统Identification 辨识Impulse response 脉冲响应Inertial 惯性的,惯量的,惰性的Inherent characteristic 固有特性Initial condition 初始条件Initial state 初始状态Initial value theorem 初值定理Inner loop 内环Input 输入Input node 输入节点Input signal 输入信号Integral action 积分作用Integral control 积分控制Internal description 内部描述Inverse matrix 逆矩阵Inverse transformation 反变换Inverse Laplace transforms 拉普拉斯反变换Isocline method 等倾线法Iterative algorithm 迭代算法JJordan block 约当块Jordan canonical form 约当标准型KKalman criterion 卡尔曼准则Kalman filter 卡尔曼滤波器LLag network 滞后网络Lag compensation 滞后补偿Laplace transforms 拉普拉斯变换Large scale system 大系统Lead network 超前网络Limit cycle 极限环Linearization 线性化Linearity 线性度Linear equation 线性方程Linear system 线性系统Load-response curve 负荷响应曲线Locus 轨迹Log magnitude 对数幅值Low pass characteristic 低通特性MMagnitude condition 幅值条件Magnitude-Versus-Phase plot 幅值特性曲线Manipulated variable 操纵变量Mason rule 梅森公式Mathematical model 数学模型Matrix 矩阵Maximum overshoot 最大超调量Measurable 可测量的Measured variable 被测变量Minimum phase system 最小相位系统Model decomposition 模型分解Modulus 模Moment of inertia 转动惯量Multinomial 多项式(的)Multivariable system 多变量系统NNatural frequency 自然频率Negative feedback 负反馈Nichols chart 尼柯尔斯图线Node 节点Noise 噪声Nonlinear control system 非线性控制系统Nonminimum phase system 非最小相位系统Nonsingular 非奇异的Norm 范数Numerical control 数字控制Nyquist criterion 奈奎斯特判据Nyquist contour 奈奎斯特轨线OObjective function 目标函数Observability 可观性,能观性Observer 观测器Odd symmetry 奇对称Offset 偏移,位移Open loop 开环Optimal control 最优控制Optimization 最优化Origin 原点Oscillation 振荡Oscillatory response 振荡响应Outer loop 外环Output 输出Output signal 输出信号Over damping 过阻尼Overshoot 超调量PParameter 参数Peak overshoot 超调峰值Peak time 峰值时间Performance index 性能指标Phase lag 相位滞后Phase lead 相位超前Phase margin 相角裕度Phase plane 相平面Pickoff point 引出点PID(proportional plus integral plus derivative) PID(比例、积分、微分)控制器Piece-wise linearization 分段线性化Pole 极点Pole assignment 极点配置Polynomial 多项式Position error 位置误差Positive definiteness 正定性Pre-compensator 预补偿器Process control 过程控制Proportional band 比例带Proportional control 比例控制Pulse 脉冲Pulse width 脉宽Pure delay 纯滞后RRamp input 斜坡输入Ramp response 斜坡响应Rate feedback 速度反馈Rate time 微分时间,预调时间Rational 有理(数)的,合理的Realization 实现Reference variable 参考变量Regulator 调节器Relative stability 相对稳定Reliability 可靠性Response 响应Reset time 再调时间,积分时间Residue 留数Rise time 上升时间Roots loci 根轨迹Routh-Hurwitz criterion 劳斯-赫尔维茨判据Routh stability criterion 劳斯稳定判据SSampling control 采样控制Sampling freqency 采样频率Sampling period 采样周期Series compensation 串联补偿Servo 伺服机构,伺服电机Servodrive 伺服传动,伺服转动装置Set value 设定值Settling time 调节时间,稳定时间Signal flow graph 信号流图Singular point 奇点Stability 稳定(性)Stability margin 稳定裕度State equations 状态方程State space 状态空间State variables 状态变量Steady-state 稳态的Stationary 稳态Steady-state deviation 稳态偏差Steady-state error 稳态误差Step singal 阶跃信号Step response 阶跃响应Stochastic process 随机过程Summing junction 相加点Superposition 叠加Systematic deviation 系统偏差System identification 系统辨识TTangent 切线Threshold value 阈值Time constant 时间常数Time domain 时域Time response 时间响应Time-invariant system 常定(时不变)系统Time-varying system 时变系统Trajectory 轨迹Transducer 传感器,变换器Transfer function 传递函数Transfer matrix 转移矩阵Transient response 暂态响应Transmitter 变送器Transportation lag 传输滞后UUndamped natural frequency 无阻尼自然频率Underdamping 欠阻尼Uniform stability 一致稳定Unit circle 单位圆Unit impulse 单位脉冲Unit step function 单位阶跃函数Unity feedback 单位反馈Unity matrix 单位矩阵Unstable 不稳定的Asymmetrical 不对称的VValue of quantity 量值variable 变量Vector 向量Velocity feedback 速度反馈WWaveform 波形Weighting function 加权函数White noise 白噪声ZZero 零点Zero input response 零点输入响应Zero-order holder 零阶保持器Zero-state response 零状态响应Z-transfer function Z传递函数Z-transformation Z变换。
自动控制__中英文词汇对照表
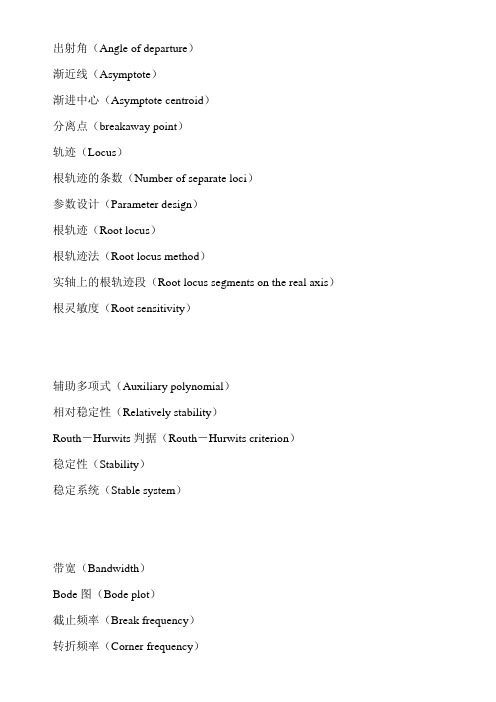
出射角(Angle of departure)渐近线(Asymptote)渐进中心(Asymptote centroid)分离点(breakaway point)轨迹(Locus)根轨迹的条数(Number of separate loci)参数设计(Parameter design)根轨迹(Root locus)根轨迹法(Root locus method)实轴上的根轨迹段(Root locus segments on the real axis)根灵敏度(Root sensitivity)辅助多项式(Auxiliary polynomial)相对稳定性(Relatively stability)Routh-Hurwits判据(Routh-Hurwits criterion)稳定性(Stability)稳定系统(Stable system)带宽(Bandwidth)Bode图(Bode plot)截止频率(Break frequency)转折频率(Corner frequency)分贝(dB)(Decibel)Fourier变换(Fourier transform)频率响应(Frequency response)对数幅值(Logarithmic magnitude)对数坐标图(Logarithmic plot)频率响应的最大值(Maximum value of the frequency response)最小相位(Minimum phase)固有频率(Natural frequency)非最小相位(Nonminimum phase)极坐标图(Polar plot)谐振频率(Resonant frequency)频率特性函数(Transfer function in the frequency domain)。
自动控制原理 附录B 控制理论术语中英文对照表

附录B 控制理论术语中英文对照表AAbsolute error 绝对误差Absolute value 绝对值Accuracy 精确度Activate 启动,触发Active electric network 有源网络Actuating signal 作用信号,启动信号Actuator 执行机构,调节器,激励器Adjust 调整Adaptive control 自适应控制Algebraic operations 代数运算Amplifier 放大器Amplitude 振幅,幅值Analog computer 模拟计算机Analog signal 模拟信号Angle condition 相角条件Angle of arrival 入射角Angle of departure 出射角Angular acceleration 角加速度Argument 幅角Armature 电枢Asymptote 渐近线Asymptotic stable 渐近稳定的Automatic control 自动控制Attenuation 衰减Auxiliary equation 辅助方程BBacklash 间隙,回差Bandwidth 带宽Bang-bang control 砰-砰控制,继电控制Be proportional to 与……成比例自动控制原理·326· ·326·Biocybernetics 生物控制论Block diangram 方框图,方块图,结构图 Bode plot 波特图 Branch分支,支路 Breakaway points 分离点 Bump 撞击,扰动 By-pass旁路CCACSD(Computer-Aided Control System Design) 控制系统计算机辅助设计 CACSE(Computer-Aided Control System Engineering) 控制系统计算机辅助工程 CAD(computer aided design) 计算机辅助设计 Cascade compensation 串联补偿校正 Cascade control 串级控制 Channel通道 Characteristic equation 特征方程 Characteristic gain locus 特征增益轨迹 Circuit电路Classical control theory 古典控制理论 Closed loop control system 闭环控制系统 Closed loop frequency response 闭环频率响应 Closed loop pole 闭环极点 Closed loop zero闭环零点 Combinational control system 复合控制系统 Comparator 比较器Comparing element 比较元件,比较环节 Compound control 复合控制 Compensation 补偿,校正 Complex plane 复平面 Conditional stability 条件隐定Configuration 结构,配置,方案,组态 Constant M loci 等M 圆 Continuous system 连续系统 Controlled variable 被控变量 Controlling machine 控制机 Control system 控制系统 Control valve 调节阀 Controllability 可控性,能控性附录B控制理论术语中英文对照表·327·Conveyor 传送器,传送带,传送装置Corner frequency 转折频率,交接频率Correcting unit 执行器Correction 校正Coupling 耦合Criterion 判据,准则Critical damping 临界阻尼Cut off rate 剪切率Cut off frequency 剪切频率Cybernetics 控制论DDamped natural frequency 有阻尼自然频率Dampe r 阻尼器Damping factor 阻尼系数Damping ratio 阻尼比Dead band 死区Dead time 纯延迟,延迟时间Decay 衰减,衰变Decomposition 分解Delay 滞后Delay element 滞后环节Denominator 分母Derivation action 微分作用Derivative control 微分控制Desired value 预期值,期望值Determinant 行列式Deviation 偏差Differencing junction 比较点Differential equations 微分方程Digital computer 数字计算机Discrete-data system 离散数据系统Disturbance 扰动,干扰Disturbance rejection property 抗干扰特性Dominate 主导Duality 对偶性Dynamic equation 动态方程Dynamic error 动态误差·327·自动控制原理·328··328·Dynamic process动态过程EEquilibrium state 平衡状态 Eigenvalue 特征值 Eigenvector 特征向量 Element 元件,环节 Error误差 Error coefficient 误差系数 Error signal 误差信号 Even symmetry 偶对称Exponential 指数,指数的,幂的 External description 外部描述 Extremum极值FFeasibility 可行性,可能性,现实性 Feedback 反馈 Feedback control 反馈控制 Feedback element 反馈环节 Feedback path 反馈通道 Feedforward前馈 Final controlling element 执行器 Final value 终值 First-order system 一阶系统 Focus焦点 Following device 随动装置 Forward path 前向通道 Fraction 分数 Frequency 频率 Frequency domain 频域 Frequency response频率响应 Frequency response characteristic 频率响应特性 Function 函数 Fuzzy control模糊控制附录B控制理论术语中英文对照表·329·GGain 增益Gain margin 增益裕度,幅值裕度Gear backlash 齿轮间隙General solution 通解Graphical method 图解法Guidance system 制导系统Gravitation area 引力域Gyro 陀螺HHarmonic 谐波,谐波量,谐振荡Harmonic response 谐波响应Holder 保持器Homogeneous equation 齐次方程Hurwitz determinant 赫尔维茨行列式Hydraulic system 液压系统Hysteresis error 回差Hysteresis loop 磁滞回环IIdealized system 理想化系统Identification 辨识Impulse response 脉冲响应Industrial robot 工业机器人Inertial 惯性的,惯量的,惰性的Inherent characteristic 固有特性Initial condition 初始条件Initial state 初始状态Initial value theorem 初值定理Inner loop 内环Input 输入Input node 输入节点Input signal 输入信号·329·自动控制原理·330· ·330·Integral action 积分作用 Integral control积分控制 IAE(integrated absolute error) 绝对误差积分 ISE(integrated square error) 平方误差积分 Internal description 内部描述 Intelligent instrument 智能仪表 Invariant 不变的,恒定的 Inverse matrix 逆矩阵 Inverse transformation 反变换 Inverse Laplace transforms 拉普拉斯反变换 Isocline method 等倾线法 Iterative algorithm迭代算法JJordan block 约旦块 Jordan canonical form约旦标准型KKalman criterion 卡尔曼准则 Kalman filter卡尔曼滤波LLag network 滞后网络 Lag compensation 滞后补偿 Laplace transforms 拉普拉斯变换 Large scale system 大系统 Lead network 超前网络 Least-mean-square 最小均方 Limit cycle 极限环 Linearization 线性化 Linearity 线性度 Linear equation 线性方程 Linear system 线性系统 Linear programming 线性规划 Load 负载附录B控制理论术语中英文对照表·331·Load-response curve 负荷响应曲线Locus 轨迹Logic diagram 逻辑图Log magnitude 对数幅值Low pass characteristic 低通特性MMagnitude condition 幅值条件Magnitude-versus-phase plot 幅相特性曲线Manipulated variable 操纵变量Mason rule 梅逊公式Mathematical model 数学模型Matrix 矩阵Maximum overshoot 最大超调量Measurable 可测量的Measured variable 被测变量Minimum phase system 最小相位系统Model decomposition 模型分解Modulus 模Moment of inertia 转动惯量Multinomial 多项式(的)Multivariable system 多变量系统NNatural frequency 自然频率Negative feedback 负反馈Nichols chart 尼柯尔斯图线Node 节点Noise 噪声Nonlinear control system 非线性控制系统Nonminimum phase system 非最小相位系统Nonsingular 非奇异的Norm 范数Numerator 分子Numerical control 数字控制,数控Nyquist criterion 奈奎斯特判据Nyquist contour 奈奎斯特轨线·331·自动控制原理·332··332·OObjective function 目标函数Observability 可观性,能观性Observer 观测器Odd symmetry 奇对称Off line 离线Offset 偏移,位移On line 在线Open loop 开环Optimal control 最优控制Optimization 最优化Origin 原点Oscillating loop 振荡回路Oscillation 振荡Oscillatory response 振荡响应Outer loop 外环Output 输出Output signal 输出信号Over damping 过阻尼Overshoot 超调量PParameter 参数Peak overshoot 超调峰值Peak time 峰值时间Performance index 性能指标Perturbance 扰动,摄动Phase lag 相位滞后Phase lead 相位超前Phase margin 相角裕度Phase modifier 相位调节器Phase plane 相平面Pickoff point 引出点PID(proportional plus integral plus derivative) controller PID (比例、积分、微分)控制器Piece-wise linearization 分段线性化Pneumatic controller 气动调节器,气动控制器附录B控制理论术语中英文对照表·333·Pole 极点Pole assignment 极点配置Polynomial 多项式Position error 位置误差Positive definiteness 正定性Pre-compensator 预补偿器Process control 过程控制Proportional action 比例作用Proportional band 比例带Proportional control 比例控制Prototype 原型,模型,样机Pulse 脉冲Pulse width 脉宽Pure delay 纯滞后QQuadratic 二次的Quadratic form 二次型Quality control 质量控制Quantizer 数字转换器RRamp input 斜坡输入Ramp response 斜坡响应Rate feedback 速度反馈Rate time 微分时间,预调时间Rational 有理(数)的,合理的Rational number 有理数Realization 实现Reference variable 参考变量Regulator 调节器Relay 继电器Relative stability 相对稳定性Reliability 可靠性Remote control 遥控Reproducibility 再现性Resilience 弹性,弹性形变·333·自动控制原理·334· ·334·Resonance 谐振 Response 响应Reset time 再调时间,积分时间 Residue 留数 Rise time上升时间 RMS(root mean square) 均方根 Roots loci 根轨迹 Routh array劳斯阵列Routh-Hurwitz criterion 劳斯-赫尔维茨判据 Routh stability criterion劳斯稳定判据SSampling control 采样控制 Sampling frequency 采样频率 Sampling period 采样周期 Saturation 饱和 Scalar function 标量函数 Scaling factor 比例因子 Sensitivity 灵敏度 Sensor传感器 Series compensation 串联补偿Servo 伺服机构,伺服电机 Servodrive 伺服传动,伺服传动装置 Set point 设定点 Set value 设定值Settling time 调节时间;稳定时间 Signal flow graph 信号流图 Singularity 奇点 Sinusoidal 正弦的 Slope 斜率 Stability 稳定(性) Stability margin 稳定裕度 State equations 状态方程 State space 状态空间 State variables 状态变量 Stationary 稳态的 Steady-state 稳态 Steady-state deviation 稳态偏差附录B控制理论术语中英文对照表·335·Steady-state error 稳态误差Step singal 阶跃信号Step response 阶跃响应Stochastic process 随机过程Summing junction 相加点Superposition 叠加Supervise 监控,检测,操纵System 系统Systematic deviation 系统偏差System identification系统辨识TTangent 切线Terminology 术语Threshold value 阈值Time constant 时间常数Time domain 时域Time response时间响应Time-invariant system 常定(时不变)系统Time-varying system 时变系统Trajectory 轨迹Transducer 传感器,变换器Transfer function 传递函数Transfer matrix转移矩阵Transient response 暂态响应Transmitter 变送器Transportation lag 传输滞后Transpose 转置(阵)UUndamped natural frequency 无阻尼自然频率Underdamping欠阻尼Uniform stability 一致稳定Unit circle 单位圆Unit impulse 单位脉冲Unit step function 单位阶跃函数Unit feedback 单位反馈·335·自动控制原理·336· ·336·Unit matrix 单位矩阵 Unstable 不稳定的 Unsymmetrical不对称的VValue of quantity 量值 Variable 变量 Vector向量 Velocity feedback 速度反馈 Viscous friction黏摩擦WWave 波 Waveform 波形 Weighting function 加权函数 White noise白噪声ZZero零点 Zero input response 零输入响应 Zero-order holder 零阶保持器 Zero-state response 零状态响应 Z-transfer function z 传递函数 Z-transformationz 变换。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《自动控制原理》部分中英文词汇对照表
A
Acceleration 加速度
Angle of departure分离角
Asymptotic stability渐近稳定性Automation自动化
Auxiliary equation辅助方程
B
Backlash间隙
Bandwidth带宽
Block diagram方框图
Bode diagram波特图
C
Cauchy’s theorem高斯定理Characteristic equation特征方程Closed-loop control system闭环控制系统Constant常数
Control system控制系统
Controllability可控性
Critical damping临界阻尼
D
Damping constant阻尼常数
Damping ratio阻尼比
DC control system直流控制系统
Dead zone死区
Delay time延迟时间
Derivative control 微分控制
Differential equations微分方程
Digital computer compensator数字补偿器Dominant poles主导极点
Dynamic equations动态方程
E
Error coefficients误差系数
Error transfer function误差传递函数
F
Feedback反馈Feedback compensation反馈补偿
Feedback control systems反馈控制系统Feedback signal反馈信号
Final-value theorem终值定理
Frequency-domain analysis频域分析Frequency-domain design频域设计
Friction摩擦
G
Gain增益
Generalized error coefficients广义误差系数
I
Impulse response脉冲响应
Initial state初始状态
Initial-value theorem初值定理
Input vector输入向量
Integral control积分控制
Inverse z-transformation反Z变换
J
Jordan block约当块
Jordan canonical form约当标准形
L
Lag-lead controller滞后-超前控制器
Lag-lead network 滞后-超前网络
Laplace transform拉氏变换
Lead-lag controller超前-滞后控制器Linearization线性化
Linear systems线性系统
M
Mass质量
Mathematical models数学模型
Matrix矩阵
Mechanical systems机械系统
N
Natural undamped frequency自然无阻尼频率Negative feedback负反馈
Nichols chart尼科尔斯图
Nonlinear control systems非线性控制系统Nyquist criterion柰奎斯特判据
O
Observability可观性
Observer观测器
Open-loop control system开环控制系统
Output equations输出方程
Output vector输出向量
P
Parabolic input抛物线输入
Partial fraction expansion部分分式展开
PD controller比例微分控制器
Peak time峰值时间
Phase-lag controller相位滞后控制器
Phase-lead controller相位超前控制器
Phase margin相角裕度
PID controller比例、积分微分控制器
Polar plot极坐标图
Poles definition极点定义
Positive feedback正反馈
Prefilter 前置滤波器
Principle of the argument幅角原理
R
Ramp error constant斜坡误差常数
Ramp input斜坡输入
Relative stability相对稳定性
Resonant frequency共振频率
Rise time上升时间调节时间 accommodation time
Robust system鲁棒系统
Root loci根轨迹
Routh tabulation(array)劳斯表
S
Sampling frequency采样频率
Sampling period采样周期
Second-order system二阶系统
Sensitivity灵敏度
Series compensation串联补偿
Settling time调节时间
Signal flow graphs信号流图
Similarity transformation相似变换
Singularity奇点
Spring弹簧Stability稳定性
State diagram状态图
State equations状态方程
State feedback状态反馈
State space状态空间
State transition equation状态转移方程State transition matrix状态转移矩阵State variables状态变量
State vector状态向量
Steady-state error稳态误差
Steady-state response稳态响应
Step error constant阶跃误差常数
Step input阶跃输入
T
Time delay时间延迟
Time-domain analysis时域分析
Time-domain design时域设计
Time-invariant systems时不变系统Time-varying systems时变系统
Type number型数
Torque constant扭矩常数
Transfer function转换方程
Transient response暂态响应
Transition matrix转移矩阵
U
Unit step response单位阶跃响应
V
Vandermonde matrix范德蒙矩阵
Velocity control system速度控制系统Velocity error constant速度误差常数
Z
Zero-order hold零阶保持
z-transfer function Z变换函数
z-transform Z变换。