Robotics机器人技术(PPT)
合集下载
机器人课件ppt

机器人课件
汇报人: 202X-12-31
目 录
• 机器人基础知识 • 机器人技术介绍 • 机器人编程实践 • 机器人应用案例分析 • 未来机器人展望
01
机器人基础知识
机器人的定义与分类
定义
机器人是一种能够通过预设程序 或人工智能技术自主完成一系列 复杂动作的自动化机器。
分类
根据应用领域和功能,机器人可 以分为工业机器人、服务机器人 、医疗机器人、军事机器人等。
Java
Java是一种面向对象的编程语言,具有跨平台的特性。它提 供了大量的机器人开发框架和库,如ROS(Robot Operating System),可用于构建复杂的机器人应用程序。
机器人编程环境搭建
ROS
ROS(Robot Operating System)是一个用于机器人开发的框架,提供了丰富的库和工 具,方便开发者进行机器人软件开发。ROS支持多种编程语言,包括Python、C和Java。
机器人控制技术
运动控制技术
通过对机器人的运动学和动力学 进行分析,实现对机器人的精确 控制,使其能够依照预定的轨迹
和姿态进行运动。
路径计划技术
根据机器人的任务需求,计划出 最优或次优的路径,使机器人能
够高效地完成任务。
导航控制技术
通过传感器和算法实现机器人在 复杂环境中的自主导航,使其能 够躲开障碍物并找到目标位置。
产品质量。
服务行业
服务机器人主要用于餐饮、酒 店、医疗、物流等领域,提供 便利、高效的服务体验。
农业领域
农业机器人可以实现自动化种 植、施肥、采摘等作业,提高 农业生产效率和下落劳动强度 。
航空航天
航空航天领域的机器人能够完 成高精度、高风险的装配和维 修工作,提高工作效率和安全
汇报人: 202X-12-31
目 录
• 机器人基础知识 • 机器人技术介绍 • 机器人编程实践 • 机器人应用案例分析 • 未来机器人展望
01
机器人基础知识
机器人的定义与分类
定义
机器人是一种能够通过预设程序 或人工智能技术自主完成一系列 复杂动作的自动化机器。
分类
根据应用领域和功能,机器人可 以分为工业机器人、服务机器人 、医疗机器人、军事机器人等。
Java
Java是一种面向对象的编程语言,具有跨平台的特性。它提 供了大量的机器人开发框架和库,如ROS(Robot Operating System),可用于构建复杂的机器人应用程序。
机器人编程环境搭建
ROS
ROS(Robot Operating System)是一个用于机器人开发的框架,提供了丰富的库和工 具,方便开发者进行机器人软件开发。ROS支持多种编程语言,包括Python、C和Java。
机器人控制技术
运动控制技术
通过对机器人的运动学和动力学 进行分析,实现对机器人的精确 控制,使其能够依照预定的轨迹
和姿态进行运动。
路径计划技术
根据机器人的任务需求,计划出 最优或次优的路径,使机器人能
够高效地完成任务。
导航控制技术
通过传感器和算法实现机器人在 复杂环境中的自主导航,使其能 够躲开障碍物并找到目标位置。
产品质量。
服务行业
服务机器人主要用于餐饮、酒 店、医疗、物流等领域,提供 便利、高效的服务体验。
农业领域
农业机器人可以实现自动化种 植、施肥、采摘等作业,提高 农业生产效率和下落劳动强度 。
航空航天
航空航天领域的机器人能够完 成高精度、高风险的装配和维 修工作,提高工作效率和安全
Robotics机器人技术(PPT)解读
Decisions require actions to be performed on devices Decisions are frequently not elementary device interactions but rather relatively complex commands
x y
t t
Example: A differential drive robot
) ) r ( r ( L R L R v x cos( ) , v y sin( ) 2 2 r L R d
First industrial robot
1969: Stanford Arm
Autonomous mobile research robot Dextrous, electric motor driven robot arm
Unimate
Robots
Robot Manipulators
Autonomy
Intuitive Human-Robot Interfaces
Robots have to be capable of achieving task objectives without human input Robots have to be able to make and execute their own decisions based on sensor information Use of robots in smart homes can not require extensive user training Commands to robots should be natural for inhabitants
机器人技术 PPT课件
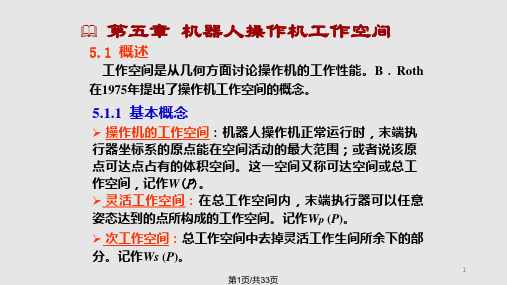
长度(即H杆的长度),则:
1) 圆C1:半径为 R1 l1 l2 h , 圆C4:半径为 R4 l1 l2 h ,
分别是该操作机的总工作空 间的边界。它们之间的环形 而积即W(P) 。
2)圆C2:半径为 R4 l1 l2 h , 圆C3:半径为 R1 l1 l2 h , C4 C3
对于自由度 F 6 的机器人操作机,将操作机的前三杆(或前
三关节)划为一组,在第三杆上设置参考点P3(相当于腕点),求
其绕将各后关面节各运杆动(形4、成5的、曲6 面杆的)包划络为,另得一到组界,限在曲末面杆上取W0(参P3) 考。点 P6(可取手心点),求出其绕后面关节运动形成的曲面(线)的 包络让, W得3(Pn到) 沿界限W0曲(P3)面运动W3,(Pn)就。形成了双参数曲面族,可用相应 的包络面公式求出末杆上参考点的工作空间界限曲面 。 W0(Pn)
一、定义
空洞——在转轴 zi 周围,沿z的全长参考点Pn均不能达到
的空间。 空腔——参考点不能达到的被完全封闭在工作空间之内的
空间。
1——空腔;2——空洞
22
第22页/共33页
二、空洞及空腔约形成条件 1、空洞的形成条件及其判别 工作空间 Wn (Pn )与其后级旋 转轴 zn1 若不相交,则在该旋 转轴的周围形成空洞。 空洞存在与否可根据前级空 间Wn (Pn )和后级旋转轴 zn1之 间的最小距离来判断。 若 Rxmin 0 。 则不存在空 洞; 若 Rxmin 0 则存在空洞。
14
第14页/共33页
腕点工作空间
15
第15页/共33页
PUMA560型机器人无结构限制时的工作空间轴剖面
16
第16页/共33页
2、图解法 用图解法求工作空间,得到的往往是工作空间的各类别
1) 圆C1:半径为 R1 l1 l2 h , 圆C4:半径为 R4 l1 l2 h ,
分别是该操作机的总工作空 间的边界。它们之间的环形 而积即W(P) 。
2)圆C2:半径为 R4 l1 l2 h , 圆C3:半径为 R1 l1 l2 h , C4 C3
对于自由度 F 6 的机器人操作机,将操作机的前三杆(或前
三关节)划为一组,在第三杆上设置参考点P3(相当于腕点),求
其绕将各后关面节各运杆动(形4、成5的、曲6 面杆的)包划络为,另得一到组界,限在曲末面杆上取W0(参P3) 考。点 P6(可取手心点),求出其绕后面关节运动形成的曲面(线)的 包络让, W得3(Pn到) 沿界限W0曲(P3)面运动W3,(Pn)就。形成了双参数曲面族,可用相应 的包络面公式求出末杆上参考点的工作空间界限曲面 。 W0(Pn)
一、定义
空洞——在转轴 zi 周围,沿z的全长参考点Pn均不能达到
的空间。 空腔——参考点不能达到的被完全封闭在工作空间之内的
空间。
1——空腔;2——空洞
22
第22页/共33页
二、空洞及空腔约形成条件 1、空洞的形成条件及其判别 工作空间 Wn (Pn )与其后级旋 转轴 zn1 若不相交,则在该旋 转轴的周围形成空洞。 空洞存在与否可根据前级空 间Wn (Pn )和后级旋转轴 zn1之 间的最小距离来判断。 若 Rxmin 0 。 则不存在空 洞; 若 Rxmin 0 则存在空洞。
14
第14页/共33页
腕点工作空间
15
第15页/共33页
PUMA560型机器人无结构限制时的工作空间轴剖面
16
第16页/共33页
2、图解法 用图解法求工作空间,得到的往往是工作空间的各类别
2024年度-机器人教学课件(共26张PPT)pptx

介绍了机器人常用传感器类型、 工作原理及在机器人感知中的应 用。
机器人自主导航与定位
阐述了机器人自主导航的基本原 理、定位方法及SLAM技术。
机器人基本概念与分类
机器人操作系统与编程
介绍了机器人的定义、发展历程 、分类及应用领域。
介绍了ROS的基本概念、功能特 点、常用命令及编程实践。
32
学生自我评价报告分享
第三代机器人
智能型机器人,具备自主 学习和决策能力,能够适 应复杂环境和任务。
5
未来趋势展望
人机协作
随着人工智能技术的发展,未来 机器人将更加注重与人类的协作 ,共同完成任务。
应用领域拓展
随着技术进步和应用需求增加, 机器人将在更多领域得到应用, 如医疗、教育、娱乐等。
自主化
机器人将具备更高的自主性和智 能化水平,能够独立完成复杂任 务。
以促进课程的不断完善和提高。
33
下一步学习计划和资源推荐
深入学习机器人相关领域知识
鼓励学生继续深入学习机器人相关领域知识,如机器视觉、深度学习在机器人中的应用等 。
参加机器人竞赛和项目实践
推荐学生参加各类机器人竞赛和项目实践,锻炼自己的实践能力和团队协作能力。
利用在线资源进行自主学习
推荐学生利用MOOCs、在线实验室等资源进行自主学习和实践操作,提高自己的学习效 果和兴趣。
01
学习成果展示
通过课程学习,学生能够掌握机器人基本概念、运动学与控制、传感器
与感知、自主导航与定位等关键知识点,并具备一定的实践操作能力。
02
学习方法分享
学生可以采用多种学习方法,如课前预习、课后复习、小组讨论、实践
操作等,以提高学习效果和兴趣。
机器人ppt(共21张PPT)

送给操作人员。 (2) 凿岩机器人。这种机器人可以利用传感器 来确定巷道的上缘,这样就可以自动瞄准巷 道缝,然后把钻头按规定的间隔布置好,钻 孔过程用微机控制,随时根据岩石硬度调整 钻头的转速、力的大小以及钻孔的形状,这 样可以大大提高生产率,人只要在平安的地 方监视整个作业过程就行了。
(3) 井下喷浆机器人。井下喷浆作业是一项繁 重且危害人体健康的作业,目前这种作业主 要由人操作机械装置来完成,缺陷很多。采 用喷浆机器人不仅可以提高喷涂质量,也可 以将人从恶劣和繁重的作业环境中解放出来。 (4) 瓦斯、地压检测机器人。瓦斯和冲击地压 是井下作业中的两个不平安的自然因素,一 旦发生突然事故,那么相当危险,
先兆,采取相应的预防措施。 柔性特征:对作业具有广泛适应性
机器人学是人们设计和应用机器人的技术和知识。 柔性特征:对作业具有广泛适应性 机器人学是一门交叉学科,它得益于机械工程、电气与电子工程、计算机科学、生物学以及其他许多学科。
此外,在食品工业、核工业等行业中也已 其结构简单,无独立控制系统,造价低廉,如附设在加工中心机床上的自动换刀机械手。
动作平稳可靠,运行速度快,称重精度高,缝口位置准确,码垛垛形整齐。 (2) 凿岩机器人。 动作平稳可靠,运行速度快,称重精度高,缝口位置准确,码垛垛形整齐。
围 大 , 定 位 精 度 高 , 通 用 性 强 , 适 用 于 不 断 哈工大博实公司自主开发的“自动包装机器人码垛生产线〞应用于大庆石化公司10万吨/年聚丙烯生产装置,全线实现了自动运行,
南京金城机械在其125-7D车架的生产线上 使用了7台机器人用于焊接和切割,提高了 产品的一致性。
2) 在电子、家电行业中的应用 机器人的应用改变了韵声集团八音琴全靠手工
装配的历史,提高了企业形象,积累了经验, 培养了人才,为企业的下一步开展打下了根 底。 3) 在石化行业中的应用 哈工大博实公司自主开发的“自动包装机器人 码垛生产线〞应用于大庆石化公司10万吨/ 年聚丙烯生产装置,全线实现了自动运行,
机器人技术及应用ppt课件ppt

THANKS
发展现状
随着航空航天技术的不断发展, 航空航天机器人在全球范围内得 到了广泛应用。目前,航空航天 机器人已经广泛应用于飞行器控 制、卫星维护、空间探索等领域 。
应用领域
航空航天机器人的应用领域包括 飞行器控制、卫星维护、空间探 索等。
服务机器人
定义
服务机器人是一种应用于服务领域的智能机械装置,能够提供各种服务,如餐饮、旅游、金融等。
05
总结与展望
机器人技术对人类社会的影响
提高生产效率
机器人技术能够提高生产制造的效率,减少人工成本,为企业带 来更大的效益。
改善生活质量
机器人技术可以应用于医疗、家庭服务、教育等领域,提高人们 的生活质量。
推动产业升级
机器人技术的发展将促进传统产业的升级和转型,推动经济的持续 发展。
未来机器人发展的趋势与挑战
发展现状
随着医疗技术的不断进步,医疗机器人在全球范围内得 到了快速发展。目前,医疗机器人已经广泛应用于手术 、康复、护理、诊断等领域。
应用领域
医疗机器人的应用领域包括手术机器人、康复机器人、 护理机器人、诊断机器人等。
航空航天机器人
定义
航空航天机器人是指应用于航空 航天领域的智能机械装置,能够 在高空中执行各种复杂任务,如 飞行器控制、卫星维护、空间探 索等。
第三阶段
20世纪90年代至今,机器人技术进入了智能化时代。这个时期的机器人具备高度智能化 、自主决策、学习能力等特点,并且开始应用到各个领域,如服务、农业、医疗等。
机器人技术的应用领域
生产制造
机器人是生产制造领域的重要设备 ,可以代替人工进行重复性工作, 提高生产效率和质量。
医疗护理
机器人可以用于手术、康复训练、 护理等方面,提高医疗护理的质量 和效率。
最新Robotics机器人技术(PPT)
Automation and Robotics in Intelligent Environments
▪ Control of the physical environment
▪ Automated blinds ▪ Thermostats and heating ducts ▪ Automatic doors ▪ Automatic room partitioning
Closed-loop control
Generation of task-specific motions
Path planning
Integration of sensors
Selection and interfacing of various types of sensors
Coping with noise and uncertainty
Filtering of sensor noise and actuator uncertainty
Creation of flexible control policies
Control has to deal with new situations
Traditional Industrial Robots
Motor driven Robots
ห้องสมุดไป่ตู้
Maillardet’s Automaton
1928: First motor driven automata
1961: Unimate
First industrial robot
1967: Shakey
Autonomous mobile research robot
A Brief History of Robotics
Robotics--机器人学英文课件

• pre-programmed • autonomous • teleoperated • augmenting
Types of Robots
I. Pre-programmed Robots
• Pre-programmed robots operate in a simple, controlled environment so that they do not require a great deal in the way of intelligent control systems to operate successfully. e.g. industrial robots in most automobile plants
IV. Augmenting Robots
• Augmenting robots are connected directly to the human user's body. Movements of the users’ body ultimately control a robotic effector of some kind. e.g. wearable robots for walking assistance
History of Robots
early Conceptions of Robots
Egyptood pigeon
“Armed knight” by Leonardo Da Vinci
History of Robots
the earliest modern Robots
Types of Robots
III. Teleoperated Robots
• Teleoperated robots are controlled remotely by a human being. e.g. underwater robots; space robotic arm
Types of Robots
I. Pre-programmed Robots
• Pre-programmed robots operate in a simple, controlled environment so that they do not require a great deal in the way of intelligent control systems to operate successfully. e.g. industrial robots in most automobile plants
IV. Augmenting Robots
• Augmenting robots are connected directly to the human user's body. Movements of the users’ body ultimately control a robotic effector of some kind. e.g. wearable robots for walking assistance
History of Robots
early Conceptions of Robots
Egyptood pigeon
“Armed knight” by Leonardo Da Vinci
History of Robots
the earliest modern Robots
Types of Robots
III. Teleoperated Robots
• Teleoperated robots are controlled remotely by a human being. e.g. underwater robots; space robotic arm
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Traditional planning architectures Behavior-based control architectures Hybrid architectures
Modeling the Robot Mechanism
Forward kinematics describes how the robots joint angle configurations translate to locations in the world
x y
t t
Example: A differential drive robot
) ) r ( r ( L R L R v x cos( ) , v y sin( ) 2 2 r L R d
Problems
Traditional programming techniques for industrial robots lack key capabilities necessary in intelligent environments
Only limited on-line sensing No incorporation of uncertainty
Mobile Robots
Robots
Walking Robots
Humanoid Robots
Autonomous Robots
The control of autonomous robots involves a number of subtasks
Understanding and modeling of the mechanism
Programming using “teach box” Repetitive tasks High speed Few sensing operations High precision movements Pre-planned trajectories and task policies No interaction with humans
Control has to deal with new situations
Traditional Industrial Robots
Traditional industrial robot control uses robot arms and largely pre-computed motions
Robot sensor selection
Kinematics, Dynamics
Low-level control of actuators
Active and passive proximity sensors Closed-loop control
Control architectures
Mobile Robot Odometry
In mobile robots the same configuration in terms of joint angles does not identify a unique location
To keep track of the robot it is necessary to incrementally update the location (this process is called odometry or dead reckoning)
Requires knowledge of the dynamics of the robot
Mass, inertia, friction For a simplistic mobile robot: F = m a + B v
House cleaning Lawn mowing Assistance to the elderly and handicapped Office assistants Security services
Robots
Robota (Czech) = A worker of forced labor
First industrial robot
1969: Stanford Arm
Autonomous mobile research robot Dextrous, electric motor driven robot arm
Unimate
Robots
Robot Manipulators
Japanese Industrial Robot Association (JIRA) :
“A device with degrees of freedom that can be controlled.” Class 1 : Manual handling device Class 2 : Fixed sequence robot Class 3 : Variable sequence robot Class 4 : Playback robot Class 5 : Numerical control robot Class 6 : Intelligent robot
Path planning
Coping with noise and uncertainty
Selection and interfacing of various types of sensors
Creation of flexible control policies
Filtering of sensor noise and actuator uncertainty
Reliable control of the actuators
Kinematics, Dynamics, and Odometry
Closed-loop control
Generation of task-specific motions
Integration of sensors
Decisions define set points or results that have to be achieved Decisions can require entire tasks to be performed
Automation and Robotics in Intelligent Environ Nhomakorabeaents
14th – 19th century Europe
Water powered for ceremonies Clockwork driven for entertainment
Maillardet’s Automaton
Motor driven Robots
1928: First motor driven automata 1961: Unimate 1967: Shakey
x vx y v y t
t
L
R
(x, y, )
Actuator Control
To get a particular robot actuator to a particular location it is important to apply the correct amount of force or torque to it.
Decisions require actions to be performed on devices Decisions are frequently not elementary device interactions but rather relatively complex commands
Adaptation
Robots have to be able to adjust to changes in the environment
Robots for Intelligent Environments
Service Robots
Security guard Delivery Cleaning Mowing Mobility Services for elderly and People with disabilities
Decisions coming from the decision maker(s) in the environment have to be executed.
Automate functions in the home Provide services to the inhabitants
Smart Home Technologies
Automation and Robotics
Motivation
Intelligent Environments are aimed at improving the inhabitants’ experience and task performance
Control of the physical environment
Automated blinds Thermostats and heating ducts Automatic doors Automatic room partitioning