第二章二维线性系统解析
合集下载
第二章 线性不变系统.
§1.7 傅里叶变换 Fourier Transform
常用傅里叶变换对
5. {d (x-a)}=exp(-j2pfxa) {exp(j2pfax)}= d (fx-fa)
6.
1 {cos (2pf 0 x) [d ( f x f 0 ) d ( f x f 0 )] 2 1 {sin(2pf 0 x) [d ( f x f 0 ) d ( f x f 0 )] 2j
0
圆对称函数的F.T. 仍是圆对称函数, 称为F-B (傅-贝)变 换,记为
-1{G()}
G() =
{g(r)}, g(r) =
§1-2 二维傅里叶变换 2-D Fourier Transform
傅里叶-贝塞尔变换
例: 利用F-B变换求圆域函数的F.T.
1, r 1 , 定义: circ(r ) 0, 其它 r x2 y 2
1
是圆对称函数
{circ(r )} 2p rJ 0 (2pr )dr
0
作变量替换, 令r’ =2pr, 并利用:
J
0
2p 0
x
0 ( )d
xJ1 ( x)
J1 (2p )
{circ(r )}
1 2p
2
r ' J 0 (r ' )dr'
§1.7 傅里叶变换 Fourier Transform
用算符表示系统
g(x, y) = ℒ{f(x, y)}
线性系统定义:
输入
f(x, y)
ℒ{
}
输出
g(x, y)
令 g1(x, y) = ℒ{f1(x, y)}, g2(x, y) = ℒ{f2(x, y)} 若对任意复常数a1, a2有: ℒ{a1 f1 (x, y) + a2 f2 (x, y) } = ℒ{a1 f1 (x, y)} + ℒ{a2 f2 (x, y) } = a1 ℒ{f1 (x, y)} + a2 ℒ{f2 (x, y) } = a1 g1 (x, y) + a2 g2 (x, y)
06-二维线性系统分析2-傅里叶变换定理、线性系统

× × × ×
-1
f 0 1
§1-2 二维傅里叶变换Fourier Transform
四、 F.T.定理 定理
自相关与功率谱的关系: 6. 相关定理 设 g(x,y) F.T. G(fx,fy),
{g(x,y)☆ g(x,y)}= |G(fx,fy)|2
反过来有:
{|g(x,y)|2}= G(fx,fy) ☆G(fx,fy)
交换积分顺序,先对x求积分:
=∫
=∫
+∞ +∞
−∞ −∞
+∞ +∞
∫
G ( f )G * ( f ' )dfdf ' ⋅ ∫ exp[ j 2π ( f − f ' ) x]dx
−∞
+∞
利用复指函数的F.T.
−∞ −∞
∫
G ( f )G * ( f ' )δ ( f − f ' )dfdf '
利用δ 函数的筛选性质
G(fx,fy),
H(fx,fy),
空域中两个函数的卷积, 是各自F.T.的乘积 的乘积. 空域中两个函数的卷积 其F.T.是各自 是各自 的乘积
{g(x,y)* h(x,y)}= G(fx,fy) . H(fx,fy)
空域中两个函数的乘积, 是各自F.T.的卷积 的卷积. 空域中两个函数的乘积 其F.T.是各自 是各自 的卷积
§1-1
线性系统
线性系统具有叠加性质 线性系统对各个输入的响应是互相独立的。 线性系统对各个输入的响应是互相独立的。
系统对某个输入的响应不会因为其它输入的存 系统对某个输入的响应不会因为其它输入的存 某个输入的响应不会因为其它输入 在而改变 系统的响应性质不会因为输入幅度的增大而改变 系统的响应性质不会因为输入幅度的增大而改变 不会因为输入幅度的增大
二维线性系统的通解及其轨线性态

,
统(
1 )之 标 川
七 未 解矩 阵 为
尸
ù 产 t
`. k , . 月 于 产
祖 一 Q
尸 e
汗 口
e o
s
t一 日
`
白 一 ,工
曰a
R s 一 i
r s f
t
t
r
补
邓 t+
n
号
,
, ,n 日
。。
针
S`
。,
{
x
( 9
)
证明
1
“
一
当△
一
,
卜 O
时
,
方程
( 3 ) 有 两 个 相 异 实 根 入 入石
(
,
必 存 在 非 奇 异 实 线 性 变 换父= T x
:
这里x
二
y )
,
使 ( 1 ) 飞北成 若 当 系
( 2 )
1〕 ) 参见 〔
卒
U
二
( T A T 一 ) 义一
坟
,
I
杏
1〕 ) 由于 系 统 ( 1 ) 与 系统 ( 2 ) 是 拓扑 等价的 ( 参见 〔
1〕 吕兰兰 〔4 n ) 所 以通 常 ( 如 〔
4 ) 考 虑方程
.
y互换
,
所 得 不统 中 的 c 就
相 当 」系 统 ( 1 ) 中 的 b
C
。
亦可 代替 (
二
日
’
一
卜
(
a
一
一 b d ) 日
。
O
二
所 得 结 果 具 有相 同 形 式 引理
t 为系统 设中( )
线性系统理论讲义
对于线性系统
X A(t)X B(t)u Y C(t)X D(t)u
1/2,12/50
时变系统和时不变系统
若向量f,g不显含时间变量t,即
f
g
f (x, u) g(x, u)
该系统称为时不变系统
若向量f,g显含时间变量t,即
f
g
f (x, u, t) g(x, u, t)
该系统称为时变系统
x t ,K , x t 为坐
1
n
标轴构成的 n 维空间。
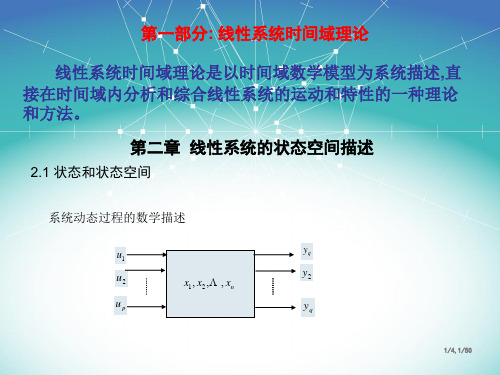
(5)状态方程:描述系统状态与输入之间关系
的、一阶微分方程(组):x&(t) Ax(t) Bu(t)
(6) 输出方程:描述系统输出与状态、输入之间关
系的数学表达式: y(t) Cx(t) Du(t)
(7)状态空间表达式: (5)+ (6). 状态变量的特点: (1)独立性:状态变量之间线性独立. (2)多样性:状态变量的选取并不唯一,实
4/18,17/50
写成矩阵形式: x1
x2
0
0
xn1 xn
0
a0
1 0 0 1
0 0 a1 a2
0 0
x1 x2
0 0
1 an
1
xn1
xn
u 0 1
y b0 a0bn
b1 a1bn
bn2 an2bn
x1
x2
bn1 an1bn bnu
5/18,18/50
结论2 给定单输入,单输出线性时不变系统的输入输出描述,其对应的状态空
uc
R2C
duc dt
R1iL
R1C
duc dt
L diL dt
L diL dt
二维线性规划的图解法

八、线性规划的基本定理
4、如果一个线性规划问题存在可行解,则一 定有基本可行解。 5、若线性规划问题存在最优解,则一定存在 最优基本可行解。 6、若线性规划问题可行域有界,则最优解一 定在极点上取得到。 7、线性规划可行域的极点的个数是有限的。
九、线性规划理论的小结
1. 一般意义上说: (1)如果线性规划问题有可行解,则一定有 基本可行解。 (2)线性规划问题如果有最优解,则最优解 一定可以从基本可行解中找得到。 (3)由于基本可行解的个数有限,所以经过 有限次迭代,就一定能找到最优解。
五、二维线性规划问题解的小结
无可行解 线性规划问题 有可行解 唯一最优解 无穷最优解 无界最优解 Return
第二部分 线性规划的基本理论
一、线性规划解的概念
1、解:满足线性规划主约束条件的点,称为线性 规划问题的解。 2、可行解:满足线性规划所有约束条件的点,称 为线性规划问题的可行解。 3、最优解:使目标函数得到极值的可行解,称为 线性规划问题的最优解。最优解包括:唯一最优 解和无穷最优解,有界最优解和无界最优解。
线性规划问题可行域中的每一个极点都 对应着一个基本可行解。 (2)由于最优解必定要从基本可行解中寻找, 所以所谓求解线性规划问题,实际上就是比 较极点处的目标函数值的大小。 (3)极点的个数是有限的,那么只要经过有 限次寻找就一定能够找到最优解。 Return
三、基本解、基本可行解与可行基
1、基本解 假设B为线性规划问题的基,对约束系 数矩阵A、目标函数系数向量C、决策向量X X 进行分块处理,则有: ( B , N )( X ) = b 。
B N
因此得: X B = B−1b − B−1NXN 。令非基变量的取 值等于零,则得: X B = B −1b 。一般称:
傅立叶光学第二章总结
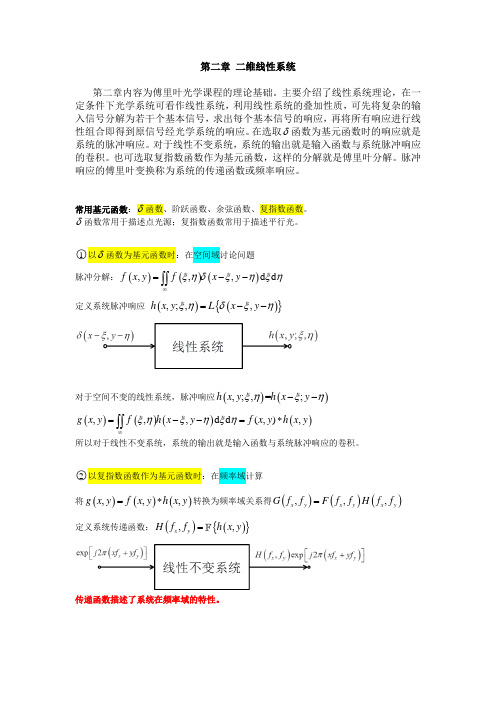
第二章 二维线性系统第二章内容为傅里叶光学课程的理论基础。
主要介绍了线性系统理论,在一定条件下光学系统可看作线性系统,利用线性系统的叠加性质,可先将复杂的输入信号分解为若干个基本信号,求出每个基本信号的响应,再将所有响应进行线性组合即得到原信号经光学系统的响应。
在选取δ函数为基元函数时的响应就是系统的脉冲响应。
对于线性不变系统,系统的输出就是输入函数与系统脉冲响应的卷积。
也可选取复指数函数作为基元函数,这样的分解就是傅里叶分解。
脉冲响应的傅里叶变换称为系统的传递函数或频率响应。
常用基元函数:δ函数、阶跃函数、余弦函数、复指数函数。
δ函数常用于描述点光源;复指数函数常用于描述平行光。
○1以δ函数为基元函数时:在空间域讨论问题 脉冲分解:()()(),,,d d f x y f x y ξηδξηξη∞=--⎰⎰定义系统脉冲响应 ()(){},;,,h x y L x y ξηδξη=--对于空间不变的线性系统,脉冲响应()(),;,=;h x y h x y ξηξη--()()()(),,,d d (,),g x y f h x y f x y h x y ξηξηξη∞=--=*⎰⎰所以对于线性不变系统,系统的输出就是输入函数与系统脉冲响应的卷积。
○2以复指数函数作为基元函数时:在频率域计算 将()()(),,,g x y f x y h x y =*转换为频率域关系得()()(),,,x y x y x y G f f F f f H f f = 定义系统传递函数:()(){},,x y H f f h x y =传递函数描述了系统在频率域的特性。
线性不变系统的作用:。
二维线性系统
H(fx,fy)的模称振幅传递函数. H(fx,fy)的复角称相位传递函数. 的模称振幅传递函数 振幅传递函数. 的复角称相位传递函数 相位传递函数.
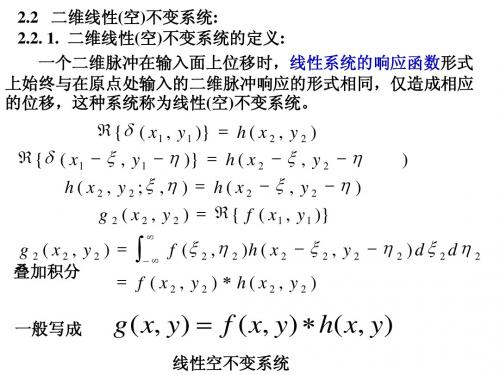
2.2. 3. 二维线性不变系统的本征函数: 二维线性不变系统的本征函数 本征函数
若ℜ{f(x ,y)}=a f(x ,y), 式中a为复常数,则称 ,y) 为算 , 式中a为复常数,则称f(x }表征的系统的本征函数 表征的系统的本征函数。 符ℜ{ }表征的系统的本征函数。 系统的本征函数是一特定的输入函数, 系统的本征函数是一特定的输入函数,输入输出之间仅差 别一个复常数,复指数基元就是线性空不变系统的本征函数。 别一个复常数,复指数基元就是线性空不变系统的本征函数。
叠加积分 一般写成
)
∫
∞
−∞
f (ξ 2 , η 2 )h ( x 2 − ξ 2 , y 2 − η 2 ) d ξ 2 d η 2
= f ( x2 , y2 ) ∗ h( x2 , y2 )
g(x, y) = f (x, y) ∗ h(x, y)
线性空不变系统
2.2. 2. 二维线性不变系统的传递函数: 二维线性不变系统的传递函数 传递函数
F( f x , f y ) = ∫
逆变换: 逆变换
若输入空间域函数f(x,y),其付里变换为: ,其付里变换为 若输入空间域函数
∫ f ( x, , y) = ∫ ∫
∞
∞
−∞ −∞ ∞ ∞
f ( x, y) exp − j2π ( f x x + f y y) dxdy
[
−∞ −∞
F( f x , f y )exp j2π ( f x x + f y
[
] y)]df df
第03讲二维线性不变系统

f f H f rect rect 4 2
计算计算方法,首先求出输入函数的频谱,再用图解找出输出函数 的频谱,最后用反变换计算出系统的输出。
不变线性系统图解法(2)
输入函数的频谱为
1 x x F g x F com b rect * x 2 2 50 1 x x F com b rect F x 2 50 2 1 x x 2 F com b * F rect sinc f 2 50 2 2 f * 50 sinc50 f sinc2 f com b 2 f n * 50 sinc50 f sinc2 f n 25 f * sinc50 f sinc2 f 2
F f x , f y f x, y exp j f x x f y y d xdy
同时输出函数和脉冲响应函数的傅里叶变换分别为
G f x , f y g x, y exp j f x x f y y d xdy
空间频率的两种意义
空间频率类似于时域函数的时间频率,时间倒数称作频率,长度倒数 称作空间频率,即在单位长度内周期函数变化的周数(单位为:周 /mm,线对/mm,L/mm,等 ) 信息光学中有两种空间频率,一种是对二维图象进行频谱分析得到的 图象频谱对应的空间频率,这是一种空间强度分布,单位为:周/mm, 线对/mm,L/mm,等,其大小是没有限制的,可以是无穷大 另一种是对电磁波场进行频谱分析得到的平面波对应的空间频率,因 为电磁波在均匀介质中波长是常数,在其传播方向上空间频率是不变 的。因而其对应在三维空间坐标上的每个方向的空间频率(单位为: 光波数/mm )表示出的意义实际上是电磁波的传播方向,或其传播方 向与坐标轴的夹角,而且大小受到光波长的限制,最大是波长的倒数。 下章再详细讲这两者区别
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
对于给定的系统和输入, F (fx,fy) 和H (fx,fy) 较容易求出, 因此容易由输出的频谱推算出系统的输出, 可避免冗 繁的卷积积分求输出的运算. 例: P63, 2.5(3) 已知线性不变系统的脉冲响应为 h(x) = 7sinc(7x) 试用频域方法对下列每一个输入fi(x) ,求其输出 gi(x) (必要时,可做合理近似) (3) f3(x) =[1+cos(8px)]rect(x/75)
第二章 二维线性系统
主讲教师:刘 毅
太原理工大学物理与光电工程学院
本章主要内容
一.线性系统
二.线性不变系统 三.抽样定理
第一节 线性系统
1、系统的数学表示
g x, y L f x, y
用算符 L 描述系统的作用!
第一节 线性系统
2、线性系统的定义
若对于任意两个输入函数f1和f2
第一节 线性系统
举例:选取基元函数为脉冲函数 (函数) 根据脉冲函数的筛选性质,可将任意函数分解为:
f x, y
f(x) f( ) f() .......................................... x
f , x , y d d
任意函数都可以看作xy平面上不同位置处的很多 函数的线性组合,而每一个位于(,)坐标的函数 的权重因子就是函数在该点的数值f(,)。这种分 解方法称为脉冲分解。 于是系统的输出为:
一维函数的脉冲分解
g x, y L f x, y L f , x , y d d 由于系统是线性的,系统算符 L 可以写进积分号内(与积分算符交换顺序),直 接作用到各个基元函数上:
g1 x, y L f1 x, y
g2 x, y L f2 x, y
对于任意复数常数a1和a2,均有如下关系成立:
L a1 f1 x, y a2 f2 x, y L a1 f1 x, y L a2 f2 x, y
g x, y
f , L x , y d d
第一节 线性系统
若令
f , L x , y d d h x, y; , L x , y
g x, y
第二节 线性不变系统
对于线性不变系统,系统的作用可以用统一的一个脉冲响应函数来表征,系 统的分析得到简化! 叠加积分:
g x, y
f , h x, y; , d d
h x, y; , h x , y
卷积积分:
分 解
L ai fi x, y ai gi x, y
合 成
一系列的“基元函数”的和
对应的“基元函数”响应的和
f x, y ai fi x, y
i 1
m
a g x, y g x , y
i 1 i i
m
常用的基元函数有函数、阶跃函数、余弦函数、复指数函数等
a1L f1 x, y a2L f 2 x, y a1 g1 x, y a2 g 2 x, y
则表明该系统是线性系统!
均匀性、叠加性
第一节 线性系统
图例:线性系统的叠加性质
第一节 线性系统
3、基元函数的系统响应 (系统是一个线性系统)
第二节 线性不变系统
二、 线性不变系统的传递函数
脉冲响应 点扩散函数
g x, y f x, y h x, y
卷积定理
G fx , f y H fx , f y F fx , f y
G f x , f y = F g x, y
2)线性不变系统的定义
若
L t h t
若输入脉冲延迟时间,其相应h仅仅有相应的时间延迟,而函数形式不变, 这样的系统称为时不变系统。 若
L x , y h x, y; , h x , y
一个空间脉冲在输入平面位移,线性系统的响应函数形式不变,只是产生 了相应位移,这样的系统称为空间不变系统或位移不变系统。
它表示系统输出平面(x,y)点对应于输入平面坐标(,)点的函数响应,称为 系统的脉冲响应。
系统输出:
g x, y
f , h x, y; , d d
上式描述了线性系统输入和输出的关系,称其为“叠加积分”;
只要知道系统对位于输入平面上所有可能点的脉冲响应,就可以通过叠加积 分完全确定系统的输出;
g x, y
f , h x , y d d
f x, y h x, y
第二节 线性不变系统
空不变(二维)系统 : 等晕成像系统
(x,y)
h(x,y)
(x- ; y-)
( ;)
晕斑 y
x x
y
光学成像系统在等晕区内是空间不变的.
若系统输入和输出满足上述叠加积分关系,该系统必然是线性系统。
第二节 线性不变系统
一、线性不变系统——线性系统的一个子类
根据“叠加积分”原理,只要知道系统对位于输入平面上所有可能点的 脉冲响应,就可以通过叠加积 分完全确定系统的输出。但是,要得到输 入平面上所有可能位置上的脉冲响应是非常困难的,甚至是不可能的。
H f x , f y = F h x, y
F fx , f y
F f x, y
输出频谱 从空间域入手计算系统的输出频率ຫໍສະໝຸດ 应输入频谱传递函数
从频率域入手计算系统的输出
* 传递函数定义为系统脉冲响应的傅里叶变换.
第二节 线性不变系统
二、 线性不变系统的传递函数