星敏感器基本原理及研究现状与发展趋势
卫星星敏感器数据处理与应用-谢俊峰 (2)
研究意义
对于资源三号卫星500km左右的卫星高度,1角秒的定姿误 差可以引起卫星影像定位2.5米的误差; 利用星敏感器定姿在卫星自主定姿方法中精度最高。国外高 分辨率卫星一般采用星敏感器定姿,其影像直接定位精度可 达到10m级;
资源三号卫星以前的国内水平与国外相比,存在较大的差距,
最高直接定位精度为300m;姿态获取的可靠性也较差,成
完成时间:2006 年3 月 公司:Microcosm/USA 系统:DayStar SED20 Star tracker 性能:白天观测7.1 等恒星
星敏感器在卫星定姿领域
卫星姿态应用:
遥感影像直接定位[spot image,2005] 卫星飞行控制[王旭东,1999] ……
遥感影像直接定位对于测绘领域尤为重要, 高定位精度必然要求高姿态精度。
影响可靠性的因素
导航星选取 识别算法 …… 星像点提取精度 恒星相机检校精度 视场内恒星的数量 姿态确定算法 ……
导航星选取技术
星图识别技术 质心提取技术
相机检校技术 姿态解算技术 事后处理:
1、无实时输出要求; 2、可多次重复计算,保证可靠性; 3、硬件资源充足
影响姿态精度的因素
定姿精度—星敏相机检校
基于星对角距夹角的检校方法
z
基于夹角相等建立检校模型:
vi
cos ij wi w j vi A Av j vi v j
T T T T
wi y
x
N G( x0 , y0, f , k1 , k2 ) V i V j D1 D2
T
恒星成像示意图
vi
image point position error(pixel)
星敏感器基本原理及研究现状与发展趋势
星敏感器基本原理及研究现状与发展趋势0 引言星敏感器是以恒星为参照系,以星空为工作对象的高精度空间姿态测量装置,通过探测天球上不同位置的恒星并进行解算,为卫星、洲际战略导弹、宇航飞船等航空航天飞行器提供准确的空间方位和基准,并且与惯性陀螺一样都具有自主导航能力,具有重要的应用价值。
星敏感器的研究发展与应用已历经半个多世纪,随着新材料,新器件的出现和工艺技术的进步,精度提高,功耗减小,成本降低,应用领域日益广泛的新型星敏感器不断推出。
因此,及时收集整理分析比较国外星敏感器的信息,有利于国内有关姿态测量控制技术的发展。
1 星敏感器研究现状1.1 应用于卫星等空间飞行器的星敏感器星敏感器空间适用性好,且成本较高,因此传统上多用于卫星等空间飞行器的定姿。
1.1.1 基于CCD图像传感器的星敏感器电荷耦合器件(CCD)体积小,重量轻,功耗低,耐冲击,可靠性高,像元尺寸及位置固定,对磁场不敏感,适合空间应用需要,自70年代中期美国率先研发出基于CCD的星敏感器后,一直作为主流的图像传感器应用于星敏感器。
(1)德国Jena-Optronik 的ASTRO 系列该公司的第一款星敏感器是ASTRO 1,1984 年研制,1989年应用于MIR(和平)空间站上。
其后的ASTRO 5是全自主星敏感器,重量轻、功耗小、价格便宜,但横滚轴精度较差,需要两枚同时工作以提高精度。
ASTRO 10 为分体式结构,电子模块与光敏模块分离,主要应用于近地轨道的各类卫星(SAR-Lupe,TerraSAR,DARPA’s Orbital Express,我国的HJ-1 与FY-3等)。
ASTRO 10 集高精度低功耗低重量低成本等优点于一身,是全自主式星敏感器。
主要特点是:内置星表,无须先验知识定姿,遮光罩的遮光角可以自定。
自主温控或者由飞行器控制。
电子模块和敏感器头部相互独立,依靠电缆连接,便于在飞行器上的安装与调整。
电子接口可选。
利用神经网络技术实现星敏感器的星图识别
三、快速星图识别算法研究
பைடு நூலகம்
为了提高星敏感器的性能,需要研究快速星图识别算法。快速星图识别算法 是指在短时间内对接收到的信号进行识别和处理,以确定其来源和位置。该算法 需要考虑到信号的强度、频率、相位等因素,并进行综合分析,以实现快速、准 确的星图识别。
在快速星图识别算法中,常用的方法包括基于神经网络的识别算法、基于模 式识别的识别算法等。这些方法都可以在短时间内对接收到的信号进行识别和处 理,但具体实现方式和性能有所不同。
利用神经网络技术实现星敏感器的 星图识别
01 摘要
03 一、引言
目录
02 关键词:神经网络; 星敏感器;星图识别
04
二、神经网络模型的 设计和训练
目录
05 三、实验验证
07 参考内容
06 四、结论
摘要
本次演示介绍了一种利用神经网络技术实现星敏感器的星图识别的方法。首 先,对星敏感器进行了简要介绍,并阐述了星图识别的基本原理。然后,详细介 绍了神经网络模型的设计和训练过程,包括数据预处理、模型构建、训练和评估 等步骤。最后,通过实验验证了该方法的可行性和有效性。
在进行神经网络模型设计和训练之前,需要对星图数据进行预处理。首先, 需要对拍摄到的星体图像进行去噪和增强处理,以提高图像的质量和清晰度。然 后,需要对图像进行标注和分类,为后续的训练和学习提供数据基础。
2、模型构建
本次演示采用卷积神经网络(CNN)作为主要的神经网络模型。CNN是一种经 典的图像处理模型,具有强大的特征提取能力和分类能力。在CNN的基础上,本 次演示设计了具有多层次卷积层的神经网络模型。该模型包括多个卷积层、池化 层、全连接层等,可以自动提取图像的多层次特征并进行分类识别。
星敏感器杂散光分析与抑制
摘要摘要在航空航天领域,用于确定飞行器姿态的星敏感器得到广泛的应用。
由于复杂的太空光环境导致进入星敏感器的杂散光较为复杂,杂散光的抑制水平决定了星敏感器的定姿精度。
杂散光对于暗弱目标的探测影响很大,到达探测器表面的杂散光会降低像面对比度,增加背景噪声,严重时使探测目标信号被湮没。
基于以上背景,在查阅大量文献的基础上,本文分析了复杂太空光环境的来源和路径,确定了杂散光分析的步骤,介绍了影响杂散光路径的散射模型并提出了杂散光抑制水平的评价函数。
在阅读大量文献后,开展了以下几个方面的研究工作:1)运用不同类型的遮光罩和挡光环设计原理,确定不同位置挡光环的分布。
利用MATLAB软件将遮光罩和挡光环设计程序化,根据设计要求快速得到相关参数并导入ASAP软件中建模。
利用消光比和点源透射率两种评价方式,对系统中三种不同类型的遮光罩进行分析,绘出消光比和点源透射率关于光线离轴角的变化曲线,为遮光罩的设计提供理论分析依据。
利用遮光罩程序设计一种新型遮光罩,设计参数与系统内的遮光罩参数相同,对比两种遮光罩的消光比和点源透射率,得出新型遮光罩优于原遮光罩的结论。
2)采用蒙特卡罗法和重点区域采样法仿真分析。
利用散射特性测量仪器对结构的散射特性进行实测并建立多项式散射模型,散射模型建立的准确与否严重影响杂散光仿真分析的准确性。
讨论了透镜散射模型的建立和结构件散射模型方程的选择。
利用ASAP软件对工作波段为可见光的简单星敏感器系统和复杂星敏感器系统进行杂散光分析,在验证建模准确、散射模型准确、重点区域选择准确等前提下仿真得到不同光线离轴角下点源透射率的数值,与设计要求进行对比。
3)利用基于双柱罐的点源透射率测试方法,这是一种国外测量点源透射率较为普遍的测试方法。
介绍了点源透射率测试的设备、方法和测试步骤。
对可见光简单星敏感器光学系统的点源透射率实测,得出点源透射率的实测数据并绘制曲线与仿真分析数值对比,分析误差。
通过对比后,利用验证分析的评价指标,仿真值与分析值相互验证,实测表明仿真分析的正确性。
星敏感器工作原理华威股份

星敏感器工作原理华威股份
星敏感器是一种用于探测星体的仪器,其工作原理主要涉及光电效应和光学原理。
在星敏感器中,首先通过一个透镜将传入的光线聚焦到光电检测器上。
光电检测器是一种能够将光信号转化为电信号的装置,常见的有光敏二极管、光敏电阻等。
当光线照射到光电检测器上时,光电检测器会产生相应的电流或电压信号。
接下来,星敏感器通过处理电路对光电检测器输出的电信号进行放大、滤波等处理。
处理后的信号会被送到微处理器中进行进一步的计算和分析。
在计算和分析阶段,星敏感器会利用已知的星体位置和运动信息,结合光电检测器的输出信号,来确定星体的位置、方向和速度等参数。
通过不断地对星体的位置和速度进行测量和计算,星敏感器可以实现对星体的精确追踪和定位。
总的来说,星敏感器通过检测星体发出的光信号,将其转化为电信号,并利用计算和分析来确定星体的位置和运动信息。
这样就能够实现对星体的准确追踪和定位。
aps cmos星敏感器 系统原理及实现方法
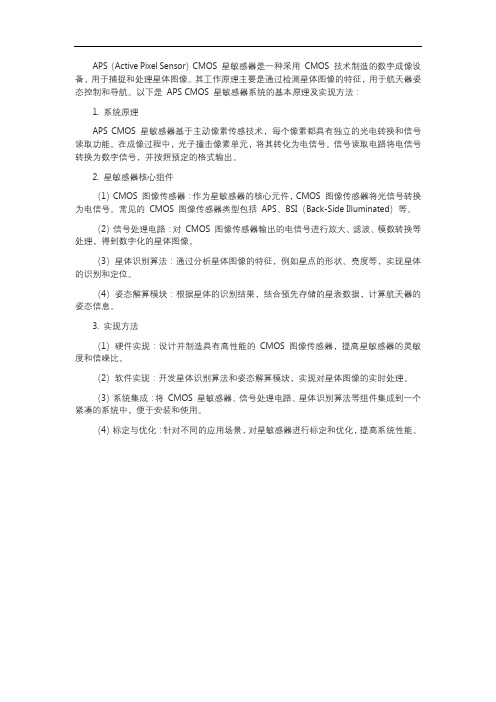
APS(Active Pixel Sensor)CMOS 星敏感器是一种采用CMOS 技术制造的数字成像设备,用于捕捉和处理星体图像。
其工作原理主要是通过检测星体图像的特征,用于航天器姿态控制和导航。
以下是APS CMOS 星敏感器系统的基本原理及实现方法:
1. 系统原理
APS CMOS 星敏感器基于主动像素传感技术,每个像素都具有独立的光电转换和信号读取功能。
在成像过程中,光子撞击像素单元,将其转化为电信号。
信号读取电路将电信号转换为数字信号,并按照预定的格式输出。
2. 星敏感器核心组件
(1)CMOS 图像传感器:作为星敏感器的核心元件,CMOS 图像传感器将光信号转换为电信号。
常见的CMOS 图像传感器类型包括APS、BSI(Back-Side Illuminated)等。
(2)信号处理电路:对CMOS 图像传感器输出的电信号进行放大、滤波、模数转换等处理,得到数字化的星体图像。
(3)星体识别算法:通过分析星体图像的特征,例如星点的形状、亮度等,实现星体的识别和定位。
(4)姿态解算模块:根据星体的识别结果,结合预先存储的星表数据,计算航天器的姿态信息。
3. 实现方法
(1)硬件实现:设计并制造具有高性能的CMOS 图像传感器,提高星敏感器的灵敏度和信噪比。
(2)软件实现:开发星体识别算法和姿态解算模块,实现对星体图像的实时处理。
(3)系统集成:将CMOS 星敏感器、信号处理电路、星体识别算法等组件集成到一个紧凑的系统中,便于安装和使用。
(4)标定与优化:针对不同的应用场景,对星敏感器进行标定和优化,提高系统性能。
航天器姿态控制技术中的星敏感器辅助设计研究

航天器姿态控制技术中的星敏感器辅助设计研究随着航天器的不断发展和进步,航天器的姿态控制技术也日益重要。
姿态控制是指控制航天器在空间中的方向、位置和速度,以实现特定的任务。
在航天器姿态控制系统中,星敏感器是一种重要的传感器,通过获取天空中的星星信息,实现对航天器姿态的精确测量和控制。
本文将讨论航天器姿态控制技术中的星敏感器辅助设计研究。
星敏感器是一种通过感知星星的空间方向,进而确定航天器姿态的传感器。
它利用光学方法对星光进行探测,并通过处理数据来确定航天器的姿态。
首先,星敏感器辅助设计需要考虑星敏感器的工作原理和性能。
星敏感器主要利用感光元件(如光电二极管)感知星光,并将光信号转换为电信号。
接下来,电信号经过放大和滤波等处理后,传递给姿态控制系统,进一步进行数据处理和姿态调整。
为了提高星敏感器的精确度和可靠性,在设计中需要重点考虑以下几个方面:1. 星敏感器的灵敏度和动态范围:在星敏感器的辅助设计中,需要确保星敏感器具有足够的灵敏度和适当的动态范围。
灵敏度是指星敏感器对星光的感知能力,灵敏度越高,传感器对星光的探测精度越高。
动态范围是指传感器能够处理的最大和最小星光强度之间的范围。
合理设计的星敏感器应具有宽动态范围,以适应不同亮度的星星。
2. 星敏感器的抗噪声能力:在航天器姿态控制中,星敏感器通常需要在复杂的空间环境中工作,如强烈的太阳光干扰、恶劣的气象条件等。
因此,星敏感器的抗噪声能力非常重要。
通过合理的信号处理算法和滤波技术,可以有效地降低星敏感器受到的噪声干扰,从而提高姿态控制的精确度。
3. 星敏感器的快速响应能力:航天器在运行过程中可能会面临各种突发情况或异常状况,需要快速调整姿态以应对。
因此,星敏感器的快速响应能力也是辅助设计中需要考虑的因素之一。
快速响应能力包括星敏感器的数据处理速度、信号传输速度和姿态控制系统的响应速度。
通过合理的星敏感器辅助设计,可以实现对航天器姿态的精确控制。
航天器在不同任务中需要保持特定的姿态,比如对地观测、轨道保持以及目标对接等。
CMOS星敏感器卫星姿态定位系统设计(精)
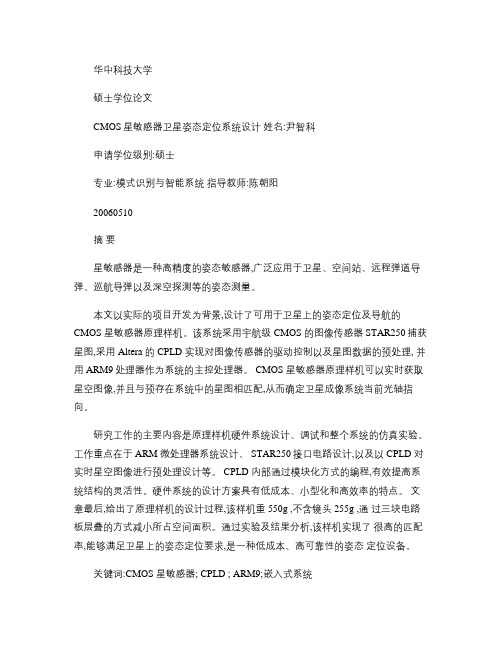
华中科技大学硕士学位论文CMOS星敏感器卫星姿态定位系统设计姓名:尹智科申请学位级别:硕士专业:模式识别与智能系统指导教师:陈朝阳20060510摘要星敏感器是一种高精度的姿态敏感器,广泛应用于卫星、空间站、远程弹道导弹、巡航导弹以及深空探测等的姿态测量。
本文以实际的项目开发为背景,设计了可用于卫星上的姿态定位及导航的CMOS 星敏感器原理样机。
该系统采用宇航级 CMOS 的图像传感器 STAR250捕获星图,采用 Altera 的 CPLD 实现对图像传感器的驱动控制以及星图数据的预处理, 并用 ARM9处理器作为系统的主控处理器。
CMOS 星敏感器原理样机可以实时获取星空图像,并且与预存在系统中的星图相匹配,从而确定卫星成像系统当前光轴指向。
研究工作的主要内容是原理样机硬件系统设计、调试和整个系统的仿真实验。
工作重点在于 ARM 微处理器系统设计、 STAR250接口电路设计,以及以 CPLD 对实时星空图像进行预处理设计等。
CPLD 内部通过模块化方式的编程,有效提高系统结构的灵活性。
硬件系统的设计方案具有低成本、小型化和高效率的特点。
文章最后,给出了原理样机的设计过程,该样机重 550g ,不含镜头 255g ,通过三块电路板层叠的方式减小所占空间面积。
通过实验及结果分析,该样机实现了很高的匹配率,能够满足卫星上的姿态定位要求,是一种低成本、高可靠性的姿态定位设备。
关键词:CMOS 星敏感器; CPLD ; ARM9;嵌入式系统AbsrtactStar sensor is a kind of high precision optic sensor widely used for attitude determination in spacecrafts, secondary planet, long-distance guided missile, cruise missile and other space attitude measurement.This paper background of a real project development, discuss a CMOS Star Sensor system design which can be used on moonlet and other spacecrafts as embedded attitude determination device. This system use a CMOS image sensor STAR250 to get image of stars. CPLD for device driver and preprocess, and make the ARM9 processor as host MCU. The ARM9 processor use stars matching arithmetic and other software methods to get the attitude information and translate it to the center controller of spacecraft.The main job of project research is system design for the sample CMOS star sensor, driver design for STAR250, and use CPLD implement preprocess of the star image. AS a attitude determine device on secondary planet, it has relative strict requirement. ARM series processor has many profits of low power, low consume, high integration and expansibility very suit for space usage. On the other hand, more than 200MHz frequency guarantee the real time process of stars image. STAR250 as a CMOS image sensor don’t support IIC and other standard interface, So we use an Altera 10,000 gates CPLD implement device driver of STAR250 as well as preprocess of stars image and interface to processor system. Throw modularization program and provide host interface to ARM make the system more flexibility and maneuverability.At last, via experiment and analysis star image, this embedded CMOS star sensor device has benefits of high precision, miniaturization, low cost and low power, and very suit for space usage.Keywords : CMOS Star Sensor; CPLD ; ARM9; Embedded system独创性声明本人声明所呈交的学位论文是我个人在导师指导下进行的研究工作及取得的研究成果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
星敏感器基本原理及研究现状与发展趋势0 引言星敏感器是以恒星为参照系,以星空为工作对象的高精度空间姿态测量装置,通过探测天球上不同位置的恒星并进行解算,为卫星、洲际战略导弹、宇航飞船等航空航天飞行器提供准确的空间方位和基准,并且与惯性陀螺一样都具有自主导航能力,具有重要的应用价值。
星敏感器的研究发展与应用已历经半个多世纪,随着新材料,新器件的出现和工艺技术的进步,精度提高,功耗减小,成本降低,应用领域日益广泛的新型星敏感器不断推出。
因此,及时收集整理分析比较国外星敏感器的信息,有利于国内有关姿态测量控制技术的发展。
1 星敏感器研究现状1.1 应用于卫星等空间飞行器的星敏感器星敏感器空间适用性好,且成本较高,因此传统上多用于卫星等空间飞行器的定姿。
1.1.1 基于CCD图像传感器的星敏感器电荷耦合器件(CCD)体积小,重量轻,功耗低,耐冲击,可靠性高,像元尺寸及位置固定,对磁场不敏感,适合空间应用需要,自70年代中期美国率先研发出基于CCD的星敏感器后,一直作为主流的图像传感器应用于星敏感器。
(1)德国Jena-Optronik 的ASTRO 系列该公司的第一款星敏感器是ASTRO 1,1984 年研制,1989年应用于MIR(和平)空间站上。
其后的ASTRO 5是全自主星敏感器,重量轻、功耗小、价格便宜,但横滚轴精度较差,需要两枚同时工作以提高精度。
ASTRO 10 为分体式结构,电子模块与光敏模块分离,主要应用于近地轨道的各类卫星(SAR-Lupe,TerraSAR,DARPA’s Orbital Express,我国的HJ-1 与FY-3等)。
ASTRO 10 集高精度低功耗低重量低成本等优点于一身,是全自主式星敏感器。
主要特点是:内置星表,无须先验知识定姿,遮光罩的遮光角可以自定。
自主温控或者由飞行器控制。
电子模块和敏感器头部相互独立,依靠电缆连接,便于在飞行器上的安装与调整。
电子接口可选。
可靠性高,在轨寿命长,抗辐射性能好。
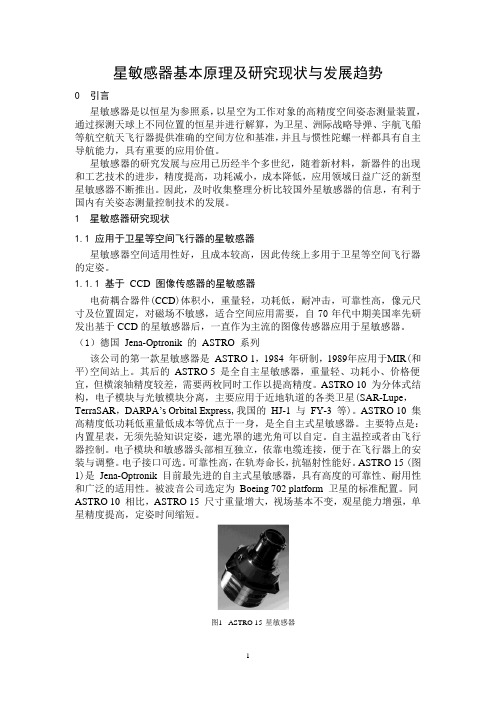
ASTRO 15 (图1)是Jena-Optronik目前最先进的自主式星敏感器,具有高度的可靠性、耐用性和广泛的适用性。
被波音公司选定为Boeing 702 platform卫星的标准配置。
同ASTRO 10相比,ASTRO 15 尺寸重量增大,视场基本不变,观星能力增强,单星精度提高,定姿时间缩短。
图1ASTRO 15 星敏感器(2)法国SODERN的星敏感器SED12 是SODERN 公司第一款CCD 星敏感器,自1989年在苏联GRANAT上使用以来10年无故障,三倍于设计寿命。
1997 年开始研制的SED 16于2001 年5 月随SPOT5 卫星首飞成功,SED16 可用于地球观察、科学探测、深空探测、地球同步轨道、ISS cargo 等多种任务,现在大量被客户采购。
SED26(图2)是SED16的ITAR (国际军品贸易条例)的自由版本。
同样是多用途、全自主,可提供三轴姿态和载体运动角速度的星敏感器。
图2SED26 星敏感器(无遮光罩)最新的SED36 是专门为Pléiades 卫星提供高姿态精度的星敏感器,设计源自SED26,使用同样的子部件,优化了热-机械设计,对光学畸变进行了精确的校正,升级了星表,增加了导航星数目。
一体结构改为分体结构,以增强散热。
(3)美国Lockheed Martin 的AST-301[1]AST-301(图3)作为主要的姿态传感器应用在JPL 2003 年1 月发射的空间红外望远镜装置(SIRTF)上。
为实现SIRTF 的要求,使用两个冗余AST-301自主式星敏感器。
可以 2 Hz 的频率输出姿态四元数,X/Y,Z 轴精度分别达到0.18/0.18 arcsec, 5.1arcsec,优于AST-201星敏感器5.5倍。
图3AST-301 星敏感器AST-301使用ACT星表,71,830颗导航星,星图的质心算法提高到1/50像素的水平,并优化姿态估算。
使用自主式延时积分(TDI)完成X轴向的图像移动补偿,防止由于飞行器的运动造成的精度降低。
Y轴向使用图像移动调节(IMA)处理图像拖尾,使合成图像信噪比最大,这样可以在0.42 °/s的速度下做到精确跟踪。
没有任何先验信息的条件下,全天任何地方 3 s 内成功获得姿态的概率为99.98%。
(4)其他基于CCD 传感器的星敏感器除上面介绍的以外,丹麦技术大学(DTU),意大利伽利略,美国Ball,英国萨里(SSTL),俄国空间研究院等机构在星敏感器研发领域都处于领先的地位,这里不作详细描述,仅将各个型号的CCD星敏感器的主要参数列表如下:表1 基于CCD的星敏感器性能参数列表Company Star sensor Mass/kgPower/WAccuracy(arcsec) 1σ P/Y,RUpdate rate/HzFOV/(°)Sensitivity/MvSlew Rate/(°)s-1Germany ASTRO5 1.5 5 5,40 2~10 14.9×14.9 6.0 0.7(10Hz) Jena-Optronik ASTRO10 3.1 <14.5 2,15 8 17.6×13.5 6.0 0.6~1.0 ASTRO15 6.0 <24 1,10 4 13.3×13.3 6.5 0.3~2.0 France SED16/26 3.3 8.5 3,15(3σ,LFE)1~10 17×17 <10 SODERN SED36 3.7 8.4 1,6(3σ,LFE)<8 <10 Denmark DTU ASC[2] 1.2 8 1,8 1 22×16 1.2 USA Ball CT-601 7.8 8~12 3 10 8×8 1.0~6.0 0.3~1.5 HAST[3]0.2(<1(°)/s) 2 8.8×8.8 5.5 0~4 USA HDOS HD1003[4] 3.9 10 2,40 10 8×8 6.5LockheedMartinAST-301 7.1 18 0.18,5.1(pair) 2 5×5 0.42 Italy Galileo A-STR 3.0 13.5 9,95(3σ, 0.5(°)/s)10 16.4×16.4 1.5~5.5 0.5~2.0 U.K. SSTL Altair-HB 1.8 2.8 15,50 1 15.7×10.5 6.0 0.5 DenmarkTermaHE-5AS 3.0 7 1,5 <4 22×22 6.2 0.5~2.0 Russia SRI ofRASBOKZ-MF 1.8 8 5,12 1 2.01.1.2 基于CMOS APS 的星敏感器有源型CMOS图像传感器,是上世纪90年代美国JPL 研发的一种CMOS图像传感器。
与CCD 星敏感器相比,APS 星敏感器具有明显的不同,主要表现为:较宽的视场(20°×20°)。
大的视场有更多的较亮的导航星,星敏感器星等阈值可以降低、光学部分的重量减轻、导航星表的容量减少。
采用CMOS图像传感器。
CMOS 图像传感器把光敏阵列、驱动和控制电路、模拟信号处理电路、存储器、A/D 转换器、全数字接口电路等完全集成在一起,实现单芯片数字成像系统,并且是单电压电源供电,它具有极低的功耗、数据可重复性读出方式,减少了系统噪声[5]。
APS图像传感器具随机窗口读取能力,这种能力简化了接口,使系统小型化。
单片ASIC(特殊用途集成电路)集成了星敏感器所有功能,芯片集成了I2C 总线接口、快速的像心提取逻辑、微处理器(8051)、存储器等等,使星敏感器的体积减小、功耗降低。
APS 星敏感器硬件系统得以简化,避免了电荷转移效率的限制,具有更好的抗辐射能力。
由于像元结构集成了多个功能晶体管的原因,CMOS图像传感器暗电流,固定模式噪声和响应不均匀性较高,并且较低的填充率直接影响亚像元插分精度。
以图4所示AeroAstroMiniature Star Tracker(MST)为例,使用Fillfactory 的STAR1000 CMOS 图像传感器,尺寸很小,重300 g,功耗2 W,成本很低,但精度稍差,为70 arcsec(3σ)。
为研制更小型、更低功耗的星敏感器,国际上的主要星敏感器供应商都在积极研究基于CMOS 图像传感器的星敏感器及其相关技术,并已取得实用化成果。
表2 为各种APS 星敏感器的性能比较。
表2 几种APS星敏感器的性能Company Star sensor Mass/kgPower/WAccuracy(arcsec) 1σ P/Y,RUpdate rate/HzFOV/(°)Sensitivity/MvSlew Rate/(°)s-1Jena-Optronik ASTRO APS 1.8 6 2,15 10 20(cone) 5.8 0.3~5 SODERN HYDRO 2.2 12 1.4,9.8(1.0(°)/s) 1~30 <10 JPL MAST[6]0.042 0.069 7.5,50 20×20 5.4Galileo Avionica AA-STR 1.425 4~7 12,100(2σ)10 20(cone) 5.4 <4 ESA ASC0SS 0.31 2.4 30,10 20×20 5.0 AeroAstro MST 0.3 2 70(3σ) 1 30(cone) 4 <101.2 应用于科学实验气球的星敏感器作为星敏感器的一种,星相机常用于科学试验气球的精确定位。
通常,实验气球工作的40 km 海拔处仍有较为明亮的天空背景。
因此,气球用星相机要成为自主式姿态敏感器,就要解决白天观星的问题[7]。
Balloon-borne Large-ApertureSubmillimeter Telescope(BLAST)的空中精确定位就使用了一对冗余的星相机ISC 和OSC。
其白天观星是通过选用大口径长焦距的镜头以及适当波长的红光滤光片,配合4 英尺长的遮光罩解决的,冗余星相机保证了太阳在任何方向都可观星。
2005 年,BLAST 在瑞典基律纳成功飞行 4 天,证实了在典型的白天条件下,ISC 可提供绝对精度<5″, 输出频率 1 Hz 的实时定位。
High Energy Replicated Optics (HERO)[8]实验也使用了星相机进行定位。