太阳跟踪控制系统相位超前控制器的设计
移动式太阳追踪控制系统的设计与实现

录仪的移动式 太阳追踪控制 系统 : ( 1 ) 太阳追踪 传感 器。太 阳追 踪传感器主要足搜索信号 , 凶此 需要具有体积小 、 质量轻 以及 功耗低的特点 , 结合不同类型传感器 的特点 , 本设计选 择 P S D L j
光敏二檄管村 { 结合 的方 案,利用 光敏二极 管对太 位置进行企 找. 然后利用 P S D传感器进 行精准定位 ; ( 2 ) 太阳追踪控 制系统 电气硬件设计_ ¨电气硬件设纠‘ 是 个硬件控制系统的核心 , 其主 身的电流很小 , 不利于控 制器的采集 , 此需要增加放大 器和滤 波电路 ( 见网 1 ) ②光敏二假 管接 口电路设 汁, 本系统中选择 的
现 有 移 动式 太 『 j } = I 追 踪 系 统 的 研 究 .提 相 对 完 善 的 移 动 式 太 … 追 踪 控 制 系统 1移 动式 太 阳追 踪 控 制 系统 的 硬 件设 计
变化而调整 ; 具备远程控制 , H . 能够实时传输数据等等。( 1 ) 太 阳追踪控制 系统 的主程序没计 系统 电源歼启之后 , 系统会 门动
传感器 没有接 收到卡 日 荚信号时需要 系统根据预定的程序 r i 动搜
3 车载 试 口电路 设 计, 由于 P S D传 感器 本 索 信号 , 当搜索 到信号之后 , 需 要执行精确追踪模』 。
为r 检验 系统 的准确性 ,设计的系统安装 轮船上进 行试 验, 具体的试验 如下 。
完成初 始化操作 , 然后根据环境 自动 没定模式 , 将 俯仰轴降剁最 低, 接触到 限位之后反 向运 动 , 系统检 测传感器状 态 , 盘 I 1 果没有 榆测到 信 , 就会高 5个角度 , 然后继续 寻找信 , y - l J 完 成信
号收集 。( 2 ) 数据采集和处理 子程序 本 系统设计 套 传感 器采 集 系统 ,其 日的就是 为了保证实时跟着太阳 、本 系统采取 的是 P S I )传感 器 , 而且 为了保证采 集数据 的准确 性 , 采集电路 巾增
太阳跟踪控制系统相位超前控制器的设计

太阳跟踪控制系统相位超前控制器的设计
杨平;刘佳;沈晨程;王勇
【期刊名称】《上海电力学院学报》
【年(卷),期】2009(025)006
【摘要】利用MATLAB的SIMULINK设计平台设计了一个太阳跟踪控制系统的相位超前控制器.通过大量的仿真实验比较,得出了较适合的相位超前控制器参数.所设计的超前控制器可以使太阳跟踪控制系统达到良好的性能指标.设计过程和仿真实验表明该设计方法简易可行,可以投入实际利用太阳能的工程中.
【总页数】3页(P582-584)
【作者】杨平;刘佳;沈晨程;王勇
【作者单位】上海电力学院,电力与自动化工程学院,上海,200090;上海电力学院,电力与自动化工程学院,上海,200090;上海电力学院,电力与自动化工程学院,上
海,200090;上海电力学院,电力与自动化工程学院,上海,200090
【正文语种】中文
【中图分类】TP273
【相关文献】
1.高精度双轴太阳跟踪控制器设计 [J], 周培涛;李成贵;刘绍宗;姚刚
2.具有超前相位自适应PID控制器及其应用 [J], 项国波;蒋轶颖
3.光电传感器式太阳跟踪控制器的设计 [J], 何萍
4.基于C8051F061的太阳跟踪控制器设计 [J], 沙春芳
5.基于STC12CSA60S2单片机的太阳跟踪控制器设计 [J], 肖月;李成贵;赵利国;魏鹏
因版权原因,仅展示原文概要,查看原文内容请购买。
太阳能跟踪控制器硬件设计

、
蝴 阻一[ 蝴
}杏 I… 甲 ~上 : 一
图 3 1 系统 总 体框 图 .
图 3 3 电源供 电 电路 .
一
12 — 8
计算 机光盘 软件 与应用
21 0 1年第 l 6期
C m u e DS f w r n p l c to s o p t rC o ta ea dA p i a i n
c n g rt n8bta ao 。0dgtIc n etr s a rc sig u i,h tdo e itni i ut E R o f uai ,.i n lgt.ii o v r i lpo e s nt oo id ne s y cr iE P OM iciL id s i o a e g n n p t c , crut ED do e ,
o t u w e. i ril e c ie e oa r c n y tm o to he r n t e y t m a d r o p ne t n o to u p tpo rThS atce d s rb s t s lrta kig s se c nr lt o y a d s se h r wa e c m o n s a d c n l h h r ag r h . e d sg f a ta kn n i l t cu e n eib e c n o f d a. x s s lrta k n y tm r v s te l o i ms功 e i n o r c i g a d s t mpe s u tr d r l l o t l o u 1 i o a r c ig s se i o e r a a r a mp h
软件 设计 开 发
电路 实时采 样得 到 的光 强数 据 ,即两 个 A 60仪用 放大器 采样 到 D2 ( )电源供 电电路 三 D 00 模 P 电路外 接 电源 从 J 输 入 ,整流二 极管 I4 0 起 到 防止 电源 的 电压 差值 ,通 过 A C8 9 数转 换传入 CU之后 ,显示 到液 晶 9 N 07 反 向 , 以及 给 外 加 电源 滤 波 的 作 用 , 紧 接 着 接 入 三 端 稳 压 器 屏 上 ,这样 可 以对 两路 光 强信 号进 行 实时 了解 。 M 70 T的 V n ,三端 稳压器 电压输入 端 Vn需 要一个 c C8 5 i端 i 3电容 ( )模数 转换 电路 六 lu O F的 电容 进行滤 波 ,GD管脚接 地 。 N 本 设计 采用 的模数 转 换器件 是 A C 8 9 它 是 C O 的 8 A D D0 0 , MS 位 / 转换器 ,片 内有 8路模拟 开关 ,可控 制 8 个模 拟量 中 的一个进 入 ( 四)光 电检 测 电路 本设计使用 两个光敏二极 管作为光强 的检 测元件 ,每个 光敏二 转 换器 中。 D 0 0 A C8 9的分辨 率为 8位 , 换 时间约 lOs 转 Ou ,含锁存 极管分别接一个 总阻值 为 1K O 大小 的可 调 电阻 以及 5 V电压, 作为一 控 制 的 8 多路 开关 ,输 出有三态 缓 冲器控 制 ,单 5 路 V电源供 电 。 A C 8 9引 脚连接 D 00 路 光强检测 电路 。随着手 电筒模拟 太阳位 置的变化 ,即不 同光敏 二 极 管感受太 阳光 的光强变化 ,光 敏二极管 的阻值会相应 改变 ,则加 A C 8 9 片有 2 条 引脚 , D0 0 芯 8 采用 双列 直插式 封装 , 图所示 。 如 在 光敏二极管两 端的电压也会 改变 ,则加在可 调电阻两端 的电压也 IO I7 N  ̄ N :8路模拟 量输 入端 。本设 计只 用 了 IO和 II两路通 I q N 肯定会产生变化 。在可调 电阻固定一个阻值大 小的情况下 ,手 电筒 道 ,分 别采 集水平 方 向 的电压差 值模 拟量 和垂直 方 向的 电压 模拟 在 不同位置 ,则 电阻两端的 电压也 会不 同;同时,手 电筒 固定一个 量 ,IO 第一 个 A6 0的 0T端 口:I1 N接 D2 U N 接第 二个 A 60的 OT D2 U 位 置, 由于两个光敏 二极管想对 于光源 的位置和 角度也不相 同,则 端 口。 他六 个输入 通道 , 其 全部 悬空 。因此 , 需要在 IO和 I1 只 N N N N 必然会导致两个光敏检测电路可调电阻输出的电压不同。将这一对 之 间进 行选 择 。如 果要 选择 IO和 I1通道 ,c地址 线总 是置为
太阳位置自动追踪系统的设计
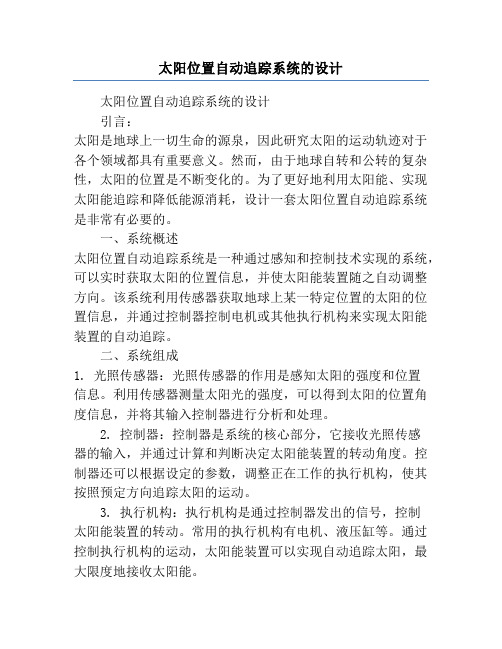
太阳位置自动追踪系统的设计太阳位置自动追踪系统的设计引言:太阳是地球上一切生命的源泉,因此研究太阳的运动轨迹对于各个领域都具有重要意义。
然而,由于地球自转和公转的复杂性,太阳的位置是不断变化的。
为了更好地利用太阳能、实现太阳能追踪和降低能源消耗,设计一套太阳位置自动追踪系统是非常有必要的。
一、系统概述太阳位置自动追踪系统是一种通过感知和控制技术实现的系统,可以实时获取太阳的位置信息,并使太阳能装置随之自动调整方向。
该系统利用传感器获取地球上某一特定位置的太阳的位置信息,并通过控制器控制电机或其他执行机构来实现太阳能装置的自动追踪。
二、系统组成1. 光照传感器:光照传感器的作用是感知太阳的强度和位置信息。
利用传感器测量太阳光的强度,可以得到太阳的位置角度信息,并将其输入控制器进行分析和处理。
2. 控制器:控制器是系统的核心部分,它接收光照传感器的输入,并通过计算和判断决定太阳能装置的转动角度。
控制器还可以根据设定的参数,调整正在工作的执行机构,使其按照预定方向追踪太阳的运动。
3. 执行机构:执行机构是通过控制器发出的信号,控制太阳能装置的转动。
常用的执行机构有电机、液压缸等。
通过控制执行机构的运动,太阳能装置可以实现自动追踪太阳,最大限度地接收太阳能。
三、系统工作原理光照传感器感知到太阳的位置和光强度后,将信息传递给控制器。
控制器根据预设参数和算法分析这些数据,并产生相应的控制信号,驱动执行机构转动。
通过与预设目标进行比对,控制器可以精确地控制执行机构的运动,使太阳能装置随着太阳的运动而不断调整自身位置和方向。
四、系统设计与实施在设计太阳位置自动追踪系统时,需要考虑以下几个方面:1. 传感器选择与性能:选择合适的光照传感器,具备感知太阳位置和强度的功能,并具有高精度、高灵敏度的特点。
2. 控制器算法:设计适用于太阳位置自动追踪的控制算法,能够实时分析光照传感器的数据,并根据算法输出相应的控制信号。
毕业论文太阳光自动跟踪控制器设计[1](精)
](https://img.taocdn.com/s3/m/9bf8d07a9b6648d7c1c74643.png)
太阳光自动跟踪控制器目录 2006级电信6班摘要太阳光自动跟踪控制器目录 2006级电信6班近年,能源是人类面临经济发展和环境维护平衡需要解决的最根本最重要的问题。
太阳能是一种极为丰富的清洁能源,同时通常最普遍且最方便使用的是电能。
随着现代的能源越来越少,有些能源趋于匮乏状态。
所以我们就根据实际情况设计了一个“太阳光自动跟踪控制器”。
现在,我们居住的家园以太阳光最为普遍,它给我们带来了光和热,我们就要合理的利用光和热,来为我们服务。
我们就通过设计的“太阳光自动跟踪控制器”来实现太阳光跟踪。
我们设计的是根据光转换电来实现功能,首先,我们选光敏传感器来实现光电转换,其次,通过OPA2132PA 来实现差分运算放大,再由继电器实现电机的正、反转,去控制翻转板的运动。
从而实现太阳光自动跟踪。
光敏传感器分别由两只光敏电阻串联交叉组合而成,每一组的两只光敏电阻中的一只为比较器的上偏置电阻,另一只为下偏置电阻:一只检测太阳光照,另一只检测环境光照,送至比较器输入端的比较电平始终为两者光照之差。
所以,本控制器能使太阳能接收装置四季全天候跟踪太阳光,调试简单,成本不高,运行可靠。
目录摘要 ········································································································ I 目录 (I)I 引言 (5)1 毕业设计的基本任务 ····························································································· 5 2 已有的实验基础和预期结果 ................................................................................. 5 3 毕业设计所完成的主要内容 (5)第一章自动跟踪控制器概论 (6)1.1 概述 ······················································································································ 6 1.2 设计原则 (6)1.2.1 通用性 ········································································································· 6 1.2.2 实用性 ········································································································· 6 1.3 系统组成及功能 (6)1.3.1 太阳光自动跟踪控制器的组成 ································································· 6 1.3.2 功能及工作原理介绍 (7)太阳光自动跟踪控制器目录 2006级电信6班第二章设计方案与原理概述 (10)2.1 设计的要求 (10)2.1.1 光敏传感器 (10)2.1.2 OPA2132PA 运算放大器 ········································································· 10 2.1.3 继电器 ·······································································································10 2.2 方案论证 ············································································································ 11 2.2.1 运算放大器的选择 ···················································································· 11 2.3 工作原理分析 (11)2.4 设计中注意的问题 ··························································································· 13 2.4.1 集成电路的选择和使用 (13)第三章设计实现 (14)3.1 PROTEL99SE概述 ······························································································ 14 3.2 电路原理图设计 (14)3.2.1 Protel99SE 电路原理图常用工具栏 ························································ 14 3.2.2 电路原理图的设计步骤 ........................................................................... 14 3.3 印制电路板设计 .. (15)3.3.1 Protel 印制电路板设计工具的应用 ························································ 15 3.3.2 PCB 布局布线规则 ·················································································· 15 3.3.3 印制电路板设计注意事项 ······································································· 16 3.4 PROTEL99SE的一些小窍门 .............................................................................. 17 3.5 PCB板的安装焊接 .. (17)3.5.1 元器件的安装 ··························································································· 18 3.5.2 PCB 板的焊接 (18)第四章调试 (21)4.1 电路板元件的安装和焊接 ................................................................................ 21 4.1.1 元器件的安装 . (21)4.1.2 电路板元件的焊接 ··················································································· 21 4.2 电路板的调试 (22)4.2.1 装配工艺检查 ··························································································· 22 4.2.2通电测试 (22)总结 ········································································································· 24 参考文献 (25)致谢 ········································································································· 26 附录 (I)太阳光自动跟踪控制器目录 2006级电信6班附录1:太阳光自动跟踪控制器原理图 ··································································· I 附录2:太阳光自动跟踪控制器PCB 板 ·································································· I I 附录3:采用LM358作运放的原理图 ···································································· III 附录4:元器件清单 ································································································ IV 附录5:太阳光自动跟踪控制器实物图 (V)太阳光自动跟踪控制设计引言 2006级电信6班汤盛明引言1 毕业设计的基本任务本毕业设计的基本任务是学习掌握自动跟踪控制器的基本原理和技术的实现,并在此基础上对该控制器进行扩展。
基于单片机的高精度太阳能跟踪控制器

摘要随着以常规能源为基础的能源结构随着资源的不断耗用将越来越适应可持续发展的需要,包括太阳能在内的可再生资源将会越来越受到人们的重视。
利用洁净的太阳光能,以半导体光生伏打效应为基础的光伏发电技术有这十分广阔的应用前景。
本设计尝试设计一种能够自动跟踪太阳光照射角度的双轴自动跟踪系统以提高太阳能电池的光-电转化率。
该系统是以单片机为核心,利用太阳轨道公式进行太阳高度角及方位角计算,并利用计时芯片以及步进电机驱动双轴跟踪系统,使太阳能电池板始终垂直于太阳入射光线,从而提高太阳能的吸收效率。
目前本设计仅通过简单的计算公式得到的数据,对东西向进行每小时一次的角度改变,南北向进行每天一次的角度改变,再通过单片机的判断进行每晚的东西向回归控制以及每半年的南北向跟踪方向的改变控制。
由于时间及作者目前的知识限制,跟踪系统只是进行粗略的角度跟踪,有较大误差,今后如有机会再进行改进。
关键词:太阳能电池太阳照射角自动跟踪单片机步进电机AbstractWith the conventinuous consumption of resources , the conventional enenrgy-based energt strcucture has not already more and more adapt to the needs for sustainable development,sppeing-up the development of and utilization of solar energy , the photovoltaic technology based on the photovoltaic effect has a very bord application prospect.In the design , we try to design an automatic tracking system with Biaxial in order to enhance solar light - electricity conversion efficiency. The system is based on single-chip, orbit the sun elevation angle formula using the sun and calculating azimuth and take the time chip advantage of dual-axis stepper motor driven tracking system, make the solar panels perpendicular to the solar incidence line, to improve the absorption efficiency of solar energy.At present, the design of a simple formula was only for calculating the data, the east-west to the point of view will be changed once an hour, the north-outh perspective will be changed once a day, and then the MCU to return to control things through the night to determine, as well as every haif a year to track the direction of the north-south change in control.Because of the time and the current limitations of the knowledge of the author’s , the tracking system to track the point of view is rough , there are many errors , if the opportunity arised the design will be iomproved in the future.Keywords:solar cells Inrradiation angle of sun tracking automatically single-chip Stepping motor目录第一章绪论 (5)1.1背景和意义 (5)1.2太阳追踪系统的国内外研究现状 (5)1.2.1光电追踪 (6)1.2.2视日运动轨迹追踪 (6)1.3论文系统设计方案 (8)1.3.1机械运动实现方案 (8)1.3.2控制系统方案 (9)第二章跟踪系统的设计构想及框架 (10)2.1 跟踪系统的设计要求 (10)2.2 跟踪系统的组成 (10)2.1.1.太阳能采集装置 (11)2.1.2.转向机构 (11)2.1.3.控制部分 (11)2.1.4.贮能装置 (12)2.1.5.逆变器 (12)2.1.6.控制器 (13)2.3 太阳照射规律 ............................................................................................ 错误!未定义书签。
太阳追踪器控制系统设计
南京信息职业技术学院毕业设计论文系部专业题目太阳追踪器控制系统设计指导教师评阅教师完成时间: 20**年 4月19日毕业设计(论文)中文摘要毕业设计(论文)外文摘要目录一绪论 (1)二太阳能自动追踪器的现状 (2)2.1 压差式太阳能跟踪器 (2)2.2 控放式太阳追踪器 (2)2.3 时钟跟踪器 (2)2.4 比较控制式太阳跟踪器 (2)三太阳能自动跟踪器存在的问题 (4)四结构设计 (5)五传感器 (6)5.1高精度传感器 (6)5.2大角度传感器 (7)六控制策略及程序设计 (8)七触摸屏控制界面设计 (10)结论 (12)致谢 (13)参考文献 (14)附件1:PLC控制程序 (15)一绪论太阳能光伏发电是改善生态环境、提高人类生存质量的绿色能源之一,研究太阳能发电技术意义重大。
如何提高太阳能电池光电转换率则是光伏发电能否推广应用的根本所在。
太阳能是一种低密度、间歇性、空间分布不断变化的能源,与常规能源有本质上的区别。
这就对太阳能的收集与利用提出了更高的要求。
提高太阳能电池光伏电池最大功率,可以从太阳能电池的材质上入手,或从逆变电源设计上入手[1];另一途径是让太阳能电池跟着阳光旋转,使太阳能电池与阳光入射角保持垂直,以达到光能最大获取率[2]。
这要依靠太阳跟踪器来实现。
太阳跟踪器[3~5],故名思意,基本功能就是使光伏阵列随着太阳而转动。
太阳能跟踪器根据结构和控制原理不同有单轴控制和双轴控制。
一般双轴系统可提高发电量35%左右,单轴系统可提高2O%左右,聚光型跟踪系统会更高[6]。
本文主要阐述一种双轴太阳跟踪器控制系统的设计方案。
二太阳能自动追踪器的现状2.1 压差式太阳能跟踪器压差式跟踪器的原理是:当入射太阳光发生偏射时,密闭容器的两侧受光面积不同,会产生压力差,在压力的作用下,使装跟踪器重新对准太阳。
根据密闭容器内所装介质的不同,可分为重力差式,气压差式,和液压式。
该机构结构简单,制作费用低,纯机械控制,不需要电子控制部分及外接电源。
太阳能电站自动跟踪式控制系统的设计

太阳能电站自动跟踪式控制系统的设计摘要由太阳能电池板的特性可知,它的发电量与照射到它上面的光照强度成正比,而接受太阳的直射光,可以得到太阳的最大光照强度。
采用相同功率的太阳电池板,自动跟踪式光伏发电设备要比固定式光伏发电设备提高发电量至少在40%以上,成本下降30%。
本文介绍了一种新型的太阳能电站自动跟踪式控制系统,该系统具有高可靠性、高稳定性、高抗干扰性,可以广泛推广应用,达到实时跟踪太阳的效果。
关键词光电检测;自动跟踪;单片机0 引言传统的燃料能源正在一天天减少,对环境造成的危害日益突出,丰富的太阳辐射能是重要的能源,是取之不尽、用之不竭的、无污染、廉价、人类能够自由利用的能源,因此太阳能光伏发电以系统是一个重要的发展方向。
只有光伏组件能够时刻正对太阳,效率才会达到最佳状态,所以需要太阳能电站自动跟踪式控制系统来完成。
1 太阳能电站自动跟踪式控制系统的组成1.1光传感器的设计利用硅电池片的光电特性,采用硅电池片作为光感元件,研制太阳能光控跟踪器。
1.1.1光传感器设计结构光传感包括3个部分,水平传感器、仰俯传感器、光强传感器。
其中仰俯传感器、水平传感器结构相同,摆放位置不同;光强传感器与前两个传感器机构相似,图1为仰俯传感器、水平传感器的原理图,图2为光强传感器的原理图。
图1图2图1中两个受光面1、2各贴放一个硅电池片,可以接受从空中透过的光。
A部分为涂黑遮光处,以避免漫反射光对硅电池片的干扰。
在两个A部分中间为透明,面积大小为硅电池片面积的大小,这样可以准确捕捉到光,准确无误不受干扰。
在受光面1、2的保留倾角α可以更好的提高捕捉灵敏度。
图2中受光面1贴放一个硅电池片,接受从空中透过的光直接检测光的强度。
1.1.2工作原理图3图3为3个传感器的安装示意图,当光强传感器中硅电池片5输出的电压信号超出设定的光控工作值时,控制器启动光控程序,根据水平传感器与仰俯传感器输出地信号调整电机工作,直至水平传感器与仰俯传感器输出平衡信号,停止电机动作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
太阳跟踪控制系统相位超前控制器的设计
太阳跟踪控制系统是利用太阳能电池板等太阳能设备组成的系统,可将太阳能转化为直流电能。
然而,太阳跟踪控制系统对太阳位置的高度、角度等因素高度敏感,系统的追踪控制精度越高,太阳能转换效率就越高。
而控制精度的提升,离不开相位超前控制器。
相位超前控制器是APC(Advance Phase Control)控制器的基础,是研发设计太阳跟踪控制系统所必需的控制器之一。
它可以通过控制电机相位,实现更加精准的追踪太阳位置。
接下来,本文将说明如何设计一个适用于太阳跟踪控制系统的相位超前控制器。
首先,我们需要了解相位超前控制器的原理。
相位超前控制器是一种根据输出目标信号与输入信号相位差量,对输出信号进行超前、滞后控制来实现更为精确的目标控制的电子元器件。
它可以通过改变控制信号的相位,使输出信号相比输入信号出现一定的超前和滞后。
在太阳跟踪控制系统中,我们可以通过改变电机电流的相位,控制太阳能组件转动的角度。
这样,即可实现太阳能组件方位的快速跟踪和精准控制。
在设计相位超前控制器时,需要根据实际条件进行优化和调整,以实现最优控制效果。
下面,我们介绍三个基本步骤:
第一步,选择合适的控制器类型。
在太阳跟踪控制系统中,常用的相位超前控制器有RST控制器和PID控制器。
具体选择
哪种类型的控制器,需要根据系统的响应速度、抗干扰性等因素进行评估和判断。
第二步,合理设置控制参数。
控制器的关键参数包括比例系数、积分时间和微分时间。
这些参数的设置需要考虑系统响应特性和误差补偿等方面。
在实际设计过程中,建议采用试错法,通过不断实验和调整,确定最佳控制参数。
第三步,采用反馈控制方法。
在太阳跟踪控制系统中,反馈信号可以采用太阳能传感器或光电二极管等元件来反馈。
通过反馈控制,可以实现太阳能组件的安全、快速地追踪太阳。
总之,相位超前控制器在太阳跟踪控制系统中起着至关重要的作用。
设计一个稳定、高效的相位超前控制器需要一定的理论知识和实践经验,需要综合考虑多种因素,实现最优控制效果。