2017-821自动控制原理
【北京工业大学821自动控制原理】真题精讲
【北京工业大学821自动控制原理】真题精讲北京工业大学821 自动控制原理目录目录 (1)1.1 真题分析 (2)1.2 真题剖析 (3)1.2.1 2016 年真题 (3)1.3 真题剖析要点总结. (16)1.3.1 常考知识点总结 (16)1.4 2016 年真题 (18)通过真题的学习和掌握,可以帮助学生把握考试重点。
每年的考点在历年试题中几乎都有重复率,因此,通过对历年真题的把握,可以掌握今年考试的重点。
另外,可以通过对历年真题的学习,把握出题者的思路及方法。
每种考试都有自己的一种固定的模式和结构,而这种模式和结构,通过认真揣摩历年真题,可以找到命题规律和学习规律。
因此,本部分就真题进行详细剖析,以便考生掌握命题规律、知悉命题的重点、难点、高频考点,帮助考生迅速搭建该学科考试的侧重点和命题规则。
1.1 真题分析综合来说,自动控制原理专业课这几年的题型变化不大,主要是计算题型,难度略有增加,侧重于对基础知识点的掌握以及对知识的灵活运用。
在复习时,对于了解的知识点,复习的时候,只需要知道概念性的定义即可,简单的看一下推导的过程或背景知识即可,有助于对相关内容的理解,不要求重点掌握,例如我们课本的第一章,就是一个引言部分,引入自动控制以及自动控制系统的概念;对于熟悉的知识点,复习的时候,应着重把握,理解公式的定义及相应公式的推导和求取、系统稳定的条件、判稳的方法、由稳定条件求取相应指标参数、折线图的绘制步骤、校正的步骤、相平面法和传递函数法、z 变换法及判断系统稳定性等等;对于掌握的知识点,复习的时候,应重点复习,反复记忆理解其中的公式和步骤,特别是第二章的结构图的化简,第三章的系统稳定性判断及相应参数求取,第四章的根轨迹绘制,第五章的频域稳定性判据,第六章的系统校正方法,第七章的非线性系统的分析,第八章的z 变换及系统稳定性判据。
1.2 真题剖析1.2.1 2016 年真题【点评】本年份真题共十二大题:都为计算题,总计150 分;和往年考试题目对比,题型变化很小,其中,题型变化最大的是第六题求取系统临界稳定条件下的参数,第七题的给定相频特性表达式求取系统传函。
821自动控制原理 华北理工
821自动控制原理华北理工华北理工大学的821自动控制原理课程是一门涉及电气、自动化、机械等多个领域的重要课程。
该课程旨在通过教授自动控制系统的基本原理和方法,培养学生的自动控制能力和解决实际问题的能力。
本文将介绍821自动控制原理课程的主要内容和学习方法。
821自动控制原理课程主要包括自动控制系统的基本概念、数学模型与传递函数、信号与系统、时域分析、根轨迹法、频域分析、稳定性分析、校正与综合等内容。
通过这些内容的学习,学生将了解到自动控制系统的基本工作原理和设计方法,能够分析和解决自动控制系统中的各种问题。
学习821自动控制原理课程时,学生需要掌握一定的数学和物理基础知识。
在学习数学模型与传递函数时,学生需要熟悉微分方程、拉普拉斯变换等数学工具。
在学习信号与系统时,学生需要掌握信号的时域分析和频域分析方法。
此外,学生还需要具备一定的电路分析和力学基础知识,以便能够理解和运用自动控制原理。
为了更好地学习821自动控制原理课程,学生可以采取一些有效的学习方法。
首先,要注重理论与实践的结合。
在学习理论知识的同时,要进行实际的实验操作,加深对自动控制系统的理解和掌握。
其次,要注重实际问题的解决。
通过学习实际案例和工程应用,学生可以将理论知识应用到实际问题的解决中,提高自己的实际应用能力。
此外,还可以参加相关的竞赛和实践项目,锻炼自己的团队合作和解决问题的能力。
在学习821自动控制原理课程时,学生还需要注重培养自己的思维能力和创新能力。
自动控制原理是一门综合性较强的学科,需要学生具备抽象思维和系统分析的能力。
因此,学生在学习过程中应注重培养自己的逻辑思维和问题解决能力。
同时,还要鼓励学生进行创新思考,提出新颖的解决方法和设计方案。
821自动控制原理课程是一门重要的课程,对于培养学生的自动控制能力和解决实际问题的能力具有重要意义。
通过学习该课程,学生可以了解自动控制系统的基本原理和方法,掌握自动控制系统的分析和设计技术,提高自己的实际应用能力和创新能力。
(NEW)西北工业大学《821自动控制原理》历年考研真题汇编(含部分答案)
目 录
2014年西北工业大学821自动控制原理考研试题(回忆版)
2013年西北工业大学821自动控制原理考研试题(回忆版)
2012年西北工业大学821自动控制原理考研试题(回忆版)
2011年西北工业大学821自动控制原理(B)考研真题
2010年西北工业大学821自动控制原理(A)考研真题
2009年西北工业大学821自动控制原理(B)考研真题
2008年西北工业大学427自动控制原理(A)考研真题
2007年西北工业大学427自动控制原理(A)考研真题
2006年西北工业大学427自动控制原理(A)考研真题(含答案)
2005年西北工业大学427自动控制原理(B)考研真题(含答案)
2004年西北工业大学427自动控制原理(A)考研真题(含答案)
2003年西北工业大学427自动控制原理考研真题(含答案)
2002年西北工业大学541自动控制原理考研真题(含答案)
2001年西北工业大学自动控制原理考研真题(含答案)。
西工大821自动控制原理-4习题及答案-第四章 根轨迹法习题及答案

1 西工大821自动控制原理第四章 根轨迹法习题及答案4-1 系统的开环传递函数为)4)(2)(1()()(*+++=s s s K s H s G试证明点311j s +-=在根轨迹上,并求出相应的根轨迹增益*K 和开环增益K 。
解 若点1s 在根轨迹上,则点1s 应满足相角条件π)12()()(+±=∠k s H s G ,如图解4-1所示。
对于31j s +-=,由相角条件=∠)()(11s H s G=++-∠-++-∠-++-∠-)431()231()131(0j j jππππ-=---632满足相角条件,因此311j s +-=在根轨迹上。
将1s 代入幅值条件:1431231131)(*11=++-⋅++-⋅++-=j j j K s H s G )(解出 : 12*=K , 238*==K K 4-2 已知开环零、极点如图4-22所示,试绘制相应的根轨迹。
(a) (b) (c) (d)(e) (f) (g) (h)题4-22图 开环零、极点分布图2解 根轨如图解4-2所示:4-3 已知单位反馈系统的开环传递函数,试概略绘出系统根轨迹。
⑴ )15.0)(12.0()(++=s s s Ks G⑵ )3)(2()5()(*+++=s s s s K s G⑶ )12()1()(++=s s s K s G解 ⑴ )2)(5(10)15.0)(12.0()(++=++=s s s Ks s s K s G系统有三个开环极点:01=p ,22-=p ,53-=p ① 实轴上的根轨迹:(]5,-∞-, []0,2-② 渐近线: ⎪⎪⎩⎪⎪⎨⎧±=+=-=--=πππϕσ,33)12(373520k a a图解4-2 根轨迹图3③ 分离点:021511=++++d d d 解之得:88.01-=d ,7863.32-d (舍去)。
④ 与虚轴的交点:特征方程为 010107)(23=+++=k s s s s D令 ⎩⎨⎧=+-==+-=010)](Im[0107)](Re[32ωωωωωj D k j D 解得⎩⎨⎧==710k ω与虚轴的交点(0,j 10±)。
821自动控制原理 中国计量大学 2017年硕士研究生考研真题
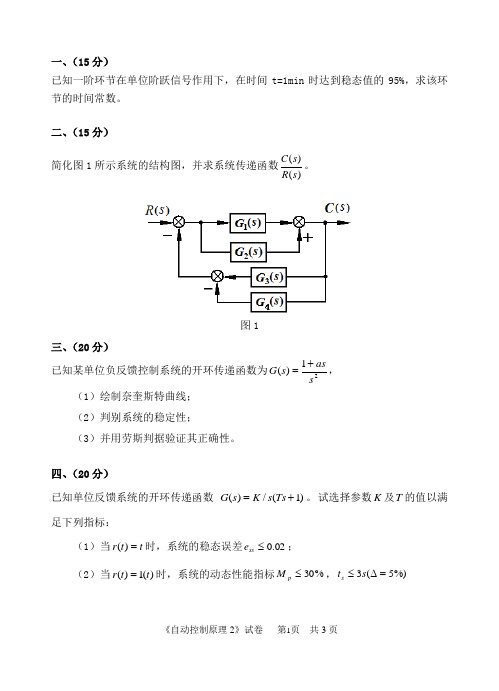
已知一阶环节在单位阶跃信号作用下,在时间t=1min 时达到稳态值的95%,求该环节的时间常数。
二、(15分)简化图1所示系统的结构图,并求系统传递函数)()(s R s C 。
图1三、(20分)已知某单位负反馈控制系统的开环传递函数为21)(sass G +=, (1)绘制奈奎斯特曲线; (2)判别系统的稳定性;(3)并用劳斯判据验证其正确性。
四、(20分)已知单位反馈系统的开环传递函数 )1(/)(+=Ts s K s G 。
试选择参数K 及T 的值以满足下列指标:(1)当t t r =)(时,系统的稳态误差02.0≤ss e ;(2)当)(1)(t t r =时,系统的动态性能指标%30≤p M ,%)5(3=∆≤s t s设一位置随动系统如图2所示。
图2 位置随动系统试求:(1)绘制以τ为参变量的根轨迹;ζ时的闭环传递函数(2)求系统的阻尼比5.0=六、(20分)已知最小相位系统)L如图3所示,试确定(ω图3 最小相位系统Bode图 (1) 开环传递函数)G;(s(2) 由γ确定系统的稳定性;(3) 将)L右移10倍频,讨论对系统的影响。
(ω七、(20分)在图4所示系统中,当10=k ,1.0=T 时,截止频率5=c ω。
若要求c ω不变,如何选择k ,T 值,才能使系统相位裕度提高45︒。
图4 系统结构图八、(20分)图5所示的采样控制系统,要求在()r t t =作用下的稳态误差0.25ss e T =,试确定系统稳定时T 的取值范围。
图5 采样控制系统【完】。
848自动控制原理

848自动控制原理自动控制原理(Automatic Control Principle)是研究自动控制系统的基础理论,它研究了自动控制系统的设计、分析与优化方法,以及自动控制系统的稳定性、精度、鲁棒性等性能指标。
自动控制原理在现代工程学中有广泛的应用,涵盖了诸如电力系统、机械系统、航空航天系统、工业生产过程控制等众多领域。
自动控制原理的基本概念是通过对系统的输入和输出之间的关系进行建模和分析,从而设计出合适的控制器来实现指定的控制目标。
在自动控制原理中,系统可以是物理系统(如电路、机械系统等),也可以是非物理系统(如信息网络、经济系统等)。
控制器可以是传统的PID控制器,也可以是现代的模糊控制器、神经网络控制器等。
自动控制原理的核心是建立系统的数学模型。
通过对系统的输入和输出进行数学表达,可以得到系统的传递函数或状态空间表达式。
传递函数描述了系统的输入和输出之间的关系,而状态空间表达式则描述了系统在一些离散时间点下的状态。
根据系统模型,可以对系统的性能进行分析和优化,从而设计出合适的控制策略。
在自动控制原理中,稳定性是一个重要的性能指标。
稳定性是指当系统受到外部扰动时,系统不会发生不可控制的变化。
稳定性分析方法可以分为两种,一种是通过系统的传递函数或状态空间方程进行频域稳定性分析,另一种是通过系统的特征根进行时域稳定性分析。
通过稳定性分析,可以确定系统的稳定范围,并根据需要设计出合适的控制策略,使系统保持稳定。
另一个重要的性能指标是精度。
精度是指系统输出与期望输出之间的差异。
在自动控制中,常用的控制方法是比例-积分-微分(PID)控制。
PID控制器通过根据系统的误差调整控制量,来使系统输出接近期望输出。
通过精确调整PID控制器的参数,可以使系统的精度达到较高的水平。
鲁棒性是自动控制系统的另一个重要性能指标。
鲁棒性是指系统对于参数变化、外部扰动和模型不确定性的抗干扰能力。
在现实环境中,系统的参数往往存在误差和变化,而模型的不确定性也是不可避免的。
西北工业大学821自动控制原理重难点解析课程讲义

G G G G G G G G G G G G G G G G G G G G H 1 2 3 4+ 1 2 4+ 2 3 4 5+ 2 4 5- 3 4 6- 2 4 6 2 s )= Φ( 1- G H + G G G G H + G G G H 2 2 1 2 3 4 1 1 2 4 1 【 例6 】 已知系统结构图, 求 C ( s ) = ? ) R ( S
西北工业大学 8 2 1自动控制原理重难点解析篇
第 1讲 控制系统的数学模型
拉普拉斯变换有关内容 拉氏变换的几个重要定理 ( 1 ) 线性性质 L [ a f ( t )± b f ( t ) ]= a F ( s )± b F ( s ) 1 2 1 2 ( 2 ) 微分定理 L [ f ′ ( t ) ]= s ·F ( s )- f ( 0 )
2 t / 2 - a t e
1 1 / s
2 1 / s 3 1 / s
1 / ( s + a )
2 2 / ( s + ω ω) 2 2 s / ( s + ω)
s i n t ω c o s t ω
线性定常微分方程求解 【 例1 】 R- C电路计算 u R i + u r= c
· i = c u u ( t )= E ·1 ( t ) c r 0
考试点( w w w . k a o s h i d i a n . c o m ) 名师精品课程 电话: 4 0 0 6 8 8 5 3 6 5
其中初条件引起的自由响应部分 C C - 41 1 1 - ( s + 5 ) 1 2 C = + = + ( s )= 0 ) s + 1 s + 4 3s + 1 3s + 4 ( s + 1 ) ( s + 4
C i m 1 =l
821自动控制原理

821自动控制原理自动控制原理(Automatic Control Principle)是工程学中一个重要的分支,主要研究如何在外界干扰的情况下实现系统的自动控制、稳定运行。
在现代工业生产、交通运输、能源等领域中,通过自动控制原理来提高效率、降低成本、提高安全性已经成为一种必然趋势。
本文将从自动控制的基本概念、基于反馈原理的控制系统、控制系统性能指标以及常见的自动控制器等方面进行详细阐述。
自动控制的基本概念自动控制是指通过对受控对象进行测量和判断,利用控制器对其进行调节,当受控对象输出与期望输出有差异时,通过改变控制器的输出信号,使得受控对象输出尽可能接近期望输出的一种技术和方法。
自动控制的目标是使得系统输出尽可能接近期望输出,并具有稳定的性能。
基于反馈原理的控制系统基于反馈原理的控制系统是现代自动控制领域的重要理论基础之一、它的基本结构包括受控对象、传感器、执行器和控制器。
其中,传感器用于对受控对象的输出进行测量,将测量结果反馈给控制器;控制器根据反馈信号和期望输出之间的差异,通过执行器对受控对象进行调节。
控制系统性能指标控制系统性能指标用于衡量控制系统的性能好坏,常见的指标包括稳定性、快速性、精确性和抗干扰性。
稳定性指系统在受到外界干扰后能够保持稳定;快速性指系统响应时间的快慢;精确性指系统输出与期望输出之间的差异;抗干扰性指系统对外界干扰的抵抗能力。
常见的自动控制器常见的自动控制器包括比例控制器、积分控制器、微分控制器和PID控制器。
比例控制器根据反馈信号与期望输出之间的差异,按比例进行调节;积分控制器根据误差与时间的乘积进行积分,用来补偿系统的稳态误差;微分控制器根据误差的变化率进行调节,主要用于提高系统的动态响应能力;PID控制器综合了比例控制器、积分控制器和微分控制器的优点,是目前最常用的自动控制器。
总结自动控制原理是工程学中一个重要的分支,它研究如何实现系统的自动控制、稳定运行。
基于反馈原理的控制系统是现代自动控制领域的重要理论基础,通过测量和判断、调节控制器输出,使系统输出尽可能接近期望输出。