CATIA DMU Kinematics Simulator运动模拟教程
catia-第8讲 运动机构模拟

8.3.7 刚体接头(Planar Joint) 通过刚体接头,可以使两个零件成为一个刚体,成为刚 体后,两零件彼此间相对位置将不改变。 单击图标 ,弹出创建刚体接头对话框,内容如下: ( 1 ) Mechanism : 接 头 隶 属 于 哪 一 个 运 动 机 构 , 可 通 过”New Mechanism“按钮新建一个运动机构; (2)Joint Name:接头名称; (3)Part 1:第一个杆件; (4)Part 2:第二个杆件。 此接头不提供外部驱动功能,仅作为杆件的连接。
运动机构模拟
航空学院 20092009-2
目录
8.1 8.2 8.3 8.4 概述 运动机构模拟环境 运动机构创建 动态仿真
8.1 概述 对于产品的数字模型而言,进行准确的 运动状态分析,是十分基本且重要的功能。 在 数 字 模 型 运 动 机 构 模 拟 中 ( DMU Kinematics)单元中,用户可以依照运动学 原理,通过约束自由度的方式,建立机构, 并且分析机构的运动状态与移动轨迹。 此单元中提供数种基本的接头(Joint), 共用户建立机构,并且可以进行动态仿真, 记录运动情形,制作成影片播放。
8.3.11 点-曲面接头(Point Surface Joint) 通过点-曲面接头,可以让让一个点在曲面上移动,点 与曲面分别位于不同的零件上,如此零件(点)即可沿着曲 面移动。使用此接头时,点必须位于曲面上,因此需要先进 行好组装,再使用此接头。 单击图标 ,弹出创建点-曲面接头对话框,内容如下: ( 1 ) Mechanism : 接 头 隶 属 于 哪 一 个 运 动 机 构 , 可 通 过”New Mechanism“按钮新建一个运动机构; (2)Joint Name:接头名称; (3)Surface 1:第一个杆件上的曲面; (4)Point 1:第二个杆件上的点。 此接头不提供外部驱动功能,仅作 为杆件的连接。
CATIA软件装配中的运动模拟教程

CATIA软件装配中的运动模拟教程CATIA(Computer-Aided Three-dimensional Interactive Application)是一款功能强大的三维建模软件,广泛应用于机械设计、装配与运动仿真等领域。
本教程将为您介绍CATIA软件在装配过程中的运动模拟功能,帮助您更好地理解和应用这一功能。
第一步:打开CATIA软件并创建装配文件在开始之前,首先确保您已经正确安装了CATIA软件。
打开软件后,选择“新建”,然后在弹出的对话框中选择“装配设计”。
第二步:导入零部件文件在装配过程中,我们需要导入零部件文件以进行后续的装配和运动模拟操作。
点击“导入”按钮,选择待导入的零部件文件,并将其添加到装配设计中。
第三步:创建关系在装配文件中,我们需要为不同零部件之间创建适当的关系,以确保它们按照预期方式进行运动。
选择“约束”工具,在零部件之间创建合适的约束关系,例如定位、配合等。
第四步:设置运动学属性在进行运动模拟之前,我们需要为每个零部件设置相应的运动学属性。
选择“属性”工具,为每个零部件设置正确的运动学类型,如旋转、平移等。
第五步:创建运动学关系运动学关系用于定义零部件之间的运动方式,将其连接起来形成一个整体模型。
选择“运动学”工具,在零部件之间创建适当的运动学关系,如齿轮、凸轮等。
第六步:设置运动规则在第五步中创建了运动学关系后,我们需要为整个装配定义运动规则。
选择“运动规则”工具,设置适当的约束和限制条件,以确保装配在运动模拟中的行为符合真实情况。
第七步:进行运动仿真完成以上准备工作后,我们可以开始进行运动仿真了。
选择“运动仿真”工具,在CATIA软件中模拟装配的运动过程,并观察各个零部件的运动轨迹、速度和加速度等参数。
第八步:分析运动仿真结果当运动仿真完成后,我们可以对仿真结果进行分析和评估。
CATIA 软件提供了丰富的可视化和数据分析工具,帮助我们深入了解装配过程中的运动性能和互动关系。
CATIADMU运动机构仿真教程

CATIADMU运动机构仿真教程CATIA是一款广泛应用于机械设计和制造领域的三维建模软件,而DMU(Digital Mock-Up)则是CATIA的一项重要功能,它能够在虚拟环境中对机械产品进行完整模拟和测量。
本篇文章将重点介绍如何使用CATIA DMU进行运动机构仿真。
首先,我们需要打开CATIA软件,并新建一个机械装配模型。
在装配模型中,我们可以选择和放置各种零件,然后使用约束关系将它们链接在一起,从而形成一个机械运动机构。
在确定机构设计之后,我们需要进行运动仿真来验证其运动性能和机构强度。
在装配模型中,选择"DMU Kinematics"工具栏中的"Module Creation"来创建一个新的运动模块。
然后,在"Product1"下创建一个新的机构,命名为"Motion"。
在"Motion"中选择"Insert",然后选择"Mechanisms"来添加运动机构零件。
接下来,我们需要选择合适的约束关系来定义机构的运动自由度。
在CATIA中,可以使用各种约束关系来模拟机构零件之间的运动关系,比如:旋转关节、滑动关节、齿轮齿条传动等。
例如,我们可以选择两个零件之间的旋转关节来定义它们之间的旋转运动。
在"Motion"中选择"Insert",然后选择"Rigid"关节来添加一个旋转关节。
然后选择两个需要链接的零件,按住Ctrl键并点击它们。
CATIA将自动在两个零件之间创建一个旋转关节。
设置旋转关节的旋转轴和角度范围后,即可完成约束的定义。
定义完所有的约束关系后,我们可以通过点击"Close"来关闭约束定义窗口。
然后选择"Motion Analysis"工具栏中的"Define Simulation"来定义仿真参数。
catia运动仿真步骤

1.仿真之前的准备将要仿真的模型所需的部件在装配模式下按照技术要求进行装配。
装配时请注意,在能满足合理装配的前提下,尽量少用约束,以免造成约束之间互相干涉,影响下一步运动仿真。
2.运动仿真通过“开始(S)”——“数字模拟”——“DMU Kinematics”进入到运动仿真的模式下,开始进行仿真设置:(1)先建立一个新机制(New Mechanism);命令在“插入(I)”菜单下,(2)对装配部件进行约束设置,命令在旋转铰里面,点击其图标右下方的箭头,点击后,出现所有铰定义图标按顺序分别是:旋转铰(Revolute joint),棱镜铰(prismatic joint),圆柱铰(Cylinderical joint),螺纹铰(Screw joint),球铰(Spherical joint),平面滑动铰(Planner joint),刚性连接(Rigid joint),点-线铰,滑动曲线铰,滚动曲线铰,点-曲面铰,万向节铰,双万向节铰,齿轮铰,齿轮-齿条铰,缆绳铰,坐标系铰。
各个铰接的的方法见文献《CATIA 机械运动分析与模拟实例》,上有很详细的介绍。
(3)设置固定件,点击固定零件图标,点击后出现New Fixed Part(新固定零件)对话框,不用理它,在图形区选择要固定的零件即可。
各种铰链设置合理,系统会自动提示:,也就是说,机制可以仿真了。
(a.)仿真使用“命令模拟”时,点击,就会出现运动模拟对话框,在对话框内拖动鼠标,由大到小或有小到大改变角和实数的范围,然后点击下面的黑色开始键,就可以看到仿真运动了。
对话框示例如下(b.)仿真采用“模拟”时,点击,即可进入和将动画视点和自动插入都选上后,用鼠标拖动command 后的命令块由大到小或由小到大改变角和实数的范围,然后点击下面的黑色开始键,就可以看到仿真运动了下面以齿轮运动仿真为例说明:装配过程不多说了,直接进入仿真模块下。
分析:构成:主动齿轮,从动齿轮,侧板使两齿轮运动起来,要用到一个新机制,新机制里有一个齿轮铰,两个旋转铰,一个固定铰,一个驱动。
CATIA手动夹钳运动仿真步骤

CATIA/ENOVIA Training2007.09.28D M U 运动仿真详细步骤前言:建立运动仿真需要3个基本条件:1.确定所有零部件都与另外一个零件之间具有运动副,例如:转动、滑动、铰链、齿轮转动、固定连接等。
2.确定一个固定不动的零部件作为基础。
3.在建立第一步的各种运动副时,选择其中一个运动副作为控制动力源,通过其他运动副作为约束方式带动所有未固定的活动零件进行运动仿真。
第 0 步打开焊夹模型使用 "文件" ->"打开"并选择GH-701D.CATProduct注:文件夹内的GH-701D-TEST.CATProduct为按照本文设置后的完成文件,供各位同仁参考指正。
进入运动仿真模块开始——〉数字模型——〉DMU kinematics显示如下结构树第一步建立第一个运动副----刚性接点1. 点击刚性接点图标,位于图标内,点击右下三角可见。
注:刚性接点就是将2个零件固定在一起,在整个运动中,他们2个是作为一个整体在运动的。
刚性接点窗口出现,如下图:2. 点击新机构(New Mechanism)按钮3. 重新命名(可以使用方便记忆的中文名字,如“夹紧.1”)。
注:以下均应为“夹紧.1”,不要再新建机构。
4. 选择如下图所示的两个零件(固定夹板.1和固定夹板.2)固定在一起6. 左面结构树中最下方出现本次运动副(刚性接点)注:如果建立的连接不正确,需要删除时,一定要连带删除所有子代。
因为刚性接点建立后,catia会自动建立2个零件之间的固联约束,在运动中限制这2个零件之间的位置关系,打开结构树中的“约束”可以看到。
建立第二个刚性接点7. 点击刚性接点图标建立第二个刚性接点8. 选择如下图所示的2个零件(蓝色连接板.1和蓝色连接板.2)固定在一起9. 点“确定”,完成刚性接点的建立建立第三个刚性接点10. 点击刚性接点图标建立第三个刚性接点11. 选择如下图所示的2个零件(蓝色连接板.1和手柄)固定在一起建立第四个刚性接点12. 点击刚性接点图标建立第四个刚性接点13. 选择如下图所示的2个零件固定在一起,黄色连接板.1和黄色连接板.2.建立第一个螺杆接点14. 点击螺杆接点图标建立第一个螺杆接点,位于图标内,点击右下三角可见。
DMU运动机构模拟举例

DMU运动机构模拟举例(DMU Kinematics)数字样机运动机构模拟(DMU Kinematics),是通过调用已有的多种运动副或者通过自动转换机械装配约束条件而产生的运动副,对任何规模的数字样机进行运动机构定义。
1 进入DMU运动机构模拟模块点击Staert菜单,选择Digital Mockup→DMU Kinematics,即可进入DMU Kinematics界面,打开帮助文件中的jigsaw_with_constraints.CATProduct文件,其中包含五个零件分别是Ring, Cog-wheel, Bearing, Slide, Case。
2 定义运动机构点击工具条DMU Kinematics→Kinematics Joints→Revolute Joint,将弹出旋转运动副创建对话框Joint Creation: Revolute,点击New Mechanism按钮将弹出定义运动机构名称的对话框Mechanism Creation。
3 定义旋转运动副选择Case用于固定Cog-wheel的圆柱孔中心线至Line1,Cog-wheel的圆柱中心线至Line2,此两条直线作为旋转运动副定义所需的两条直线,选择Case与Cog-wheel接触的平面至Plane1,选择Cog-wheel与Case接触的平面至Plane2,此两个平面作为旋转运动副定义所需的两个平面,实际上也可以用端面的两个平面代替,两个平面位置重合。
Case与Cog-wheel的旋转运动副定义对话框如下。
再点击工具条DMU Kinematics→Kinematics Joints→Revolute Joint,将弹出旋转运动副创建对话框Joint Creation: Revolute,不再点击New Mechanism按钮,直接用原来的机构,后面所有都直接用原来的机构。
选择Cog-wheel用于固定Ring的圆柱中心线至Line1,Ring的圆柱孔中心线至Line2,此两条直线作为旋转运动副定义所需的两条直线,选择Cog-wheel与Ring接触的平面至Plane1,选择Ring与Cog-wheel接触的平面至Plane2,此两个平面作为旋转运动副定义所需的两个平面,实际上也可以用端面的两个平面代替,此时需要设置约束偏移值为-1mm。
CATIA 运动模拟操作步骤
8 各参数间的关系曲线
1) 采用另一例。点 ,出现规则运动模拟对话框,如图 17 所示; 2) 点 ,选择模拟时间; 3) 勾选“激活传感器”,出现传感器对话框,如图 18 所示,将选择集中的激活
状态由“否”改为“是”; 4) 点选图 18 中,输出集中的“选项”按钮,出现图 19,图形选项对话框(与
图 23 所示。
图 17 运动模拟对话框
11
图 18 传感器对话框
图 19 图形选项图框 图 20 自定义创建曲线对话框
12
图 21 新建曲线.1 图 22 传感器对话框
13
图 23 曲线.1 图形
14
面
性
接
接
接
接
合
接
接
合
合
合
合
合
合
点
滑
滚
曲
动
动
线
曲
曲
接
线
线
合
接
接
合
合
点通 曲用 面接 接合 合
接 合
CV
齿 轮 接 合
齿
电
基
轮
缆
于
齿
接
轴
条
合
接
接
合
合
2)按连接类型要求选择相应的接合 棱形接合示例操作: a) 点选棱形接合后,出现图 3 棱点确定(注意:如果是驱动约束需勾
所示。点确定,确定完成公式编辑;(注意:对于旋转运动应输入“/1s*20deg”,
表示旋转角速度为 20deg/s)
图 9 选择机械装置.1
7
图 10 公式对话框
图 11 公式编辑器对话框
8
图 12 公式编辑器中输入参数
CATIAV5曲轴连杆运动分析教程4
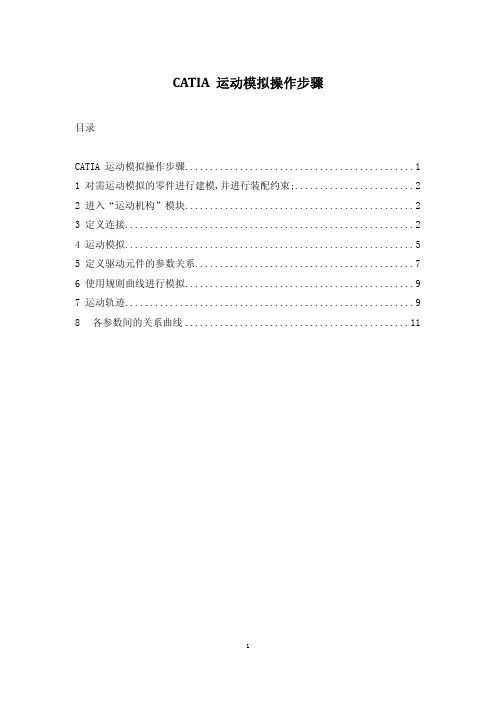
16.1.4模拟仿真
1.设置驱动
在模型树上双击曲轴与机座的运动铰,如图16-76,弹出弹出“Joint Creation: Revolute(生成旋转铰)”对话框,将“Angle driven(角度驱动)”一栏选上,如图16-77所示,点击确定完成驱动设置。
图16-76在模型树上双击曲轴与机座的运动铰
图16-77将“Angle driven(角度驱动)”一栏选上
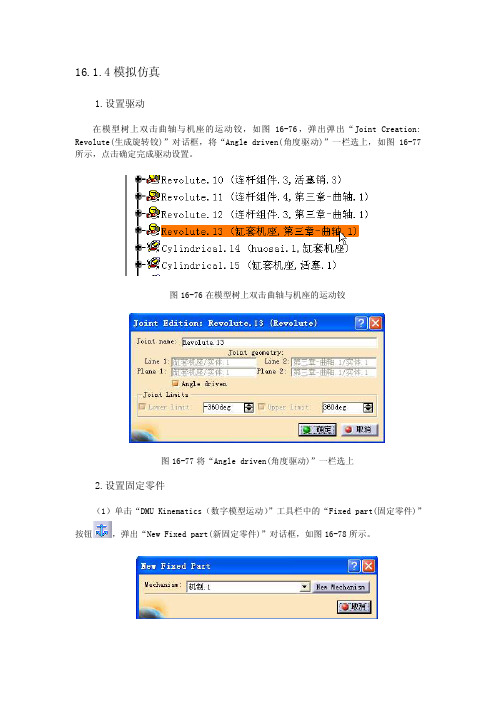
2.设置固定零件
(1)单击“DMU Kinematics(数字模型运动)”工具栏中的“Fixed part(固定零件)”
按钮,弹出“New Fixed part(新固定零件)”对话框,如图16-78所示。
图16-78 “New Fixed part(新固定零件)”对话框
(2)在图形区上选择简易机座零件,并点击“确定”按钮。
(3)单击“确定”后,则弹出一个“Information(消息)”对话框,提示现在设置的机构已经可以被模拟,如图16-79所示。
单击对话框中的“确定”按钮,关闭对话框。
3.模拟四缸内燃机运动
(1))单击“DMU Kinematics(数字模型运动)”工具栏中的“Simulation with Command(使
用命令模拟)”按钮,弹出“Kinematics Simulation-Mechanism.1(运动模拟)”对话框,如图16-80所示。
在对话框中拖动滑标改变角度范围,如图16-81所示。
单击对话框中的“Play
forward(向前演示)”按钮,四缸内燃机开始运动。
图16-80 “Kinematics Simulation- 图16-81 改变角度范围
Mechanism.1(运动模拟)”对话框。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Copyright DASSAULT SYSTEMES
Plane 1: select the left inner hinge plane Plane 2: select the left wheel surface
7:Assign the Angle driven command to the revolute joint if needed. 根据旋转联接需要选择角度驱动 8:Click Ok to end the revolute joint creation.The specification tree is updated accordingly: 点击OK结束旋转运动副创建 ,目录树随之更新
1
Create the Joints and eventually define the Laws创建联接和定义运动规律(运动性质)
2
OR… Convert Constraints, or V5 Mechanism转换约束或机构
3
Browse the Mechanism查看机构
5
Analyze the Results and Modify
Icon Name Revolute Prismatic Cylindrical Spherical Planar Rigid Roll Curve Slide Curve Point on Cuve Point Surface U Joint Gear joint Rack Joint Cable Joint Screw Joint CV Joint
Naming a Mechanism机构命名 Creating Joints创建联接 Associative Joints连接组合 Creating Laws建立运动规律 Importing Laws输入规律 Editing Joints编辑联接
Copyright DASSAULT SYSTEMES
Copyright DASSAULT SYSTEMES
8
Creating Prismatic Joints
1:Click the Prismatic Joint icon in the Kinematics Joints toolbar 。 点击“ 线性运动联接命令,对话框出现; 2:Click New Mechanism.点击新建机构 3:Select Line 1 in the geometry area. 几何区域选择直线一 4:Select Line 2 in the geometry area.几何区域选择直线二 5:Select Plane 1 and Plane 2 : 选择平面一和平面二 6:Click Ok to end the prismatic joint creation. 点击OK,完成机构创建
7
Creating Revolute Joints创建选装联接
1:Click the Revolute Joint icon in the Kinematics Joints toolbar. The Joint Creation: Revolute dialog box is displayed 点击旋转旋转联接命令按钮,对话框出现 2:Click New Mechanism. 点击新建机构
CATIA/ENOVIA Training
Foils
DMU Kinematics Simulator运动模拟
Copyright DASSAULT SYSTEMES
1
CATIA运动分析校核技巧
第一:整体考虑运动过程,分析主要的运动骨架是什么; 第二:分析各部件之间的相互运动关系,并确定好有关参数,例如门盖开启角度、玻 璃升降行程等; 第三:做好各部件联接出的辅助点、线、面,为下一步建立运动副做准备; 第四:建立运动副联接; 第五:运动模拟; 第六:结果分析(干涉分析,最小间隙分析等)
The Mechanism Creation dialog box is displayed: Note: this new dialog box lets you enter a meaningful name for the mechanism. Click Ok when done. 机构创建对话框出现
2
CATIA DMU TOOLBARS DMU工具条
Copyright DASSAULT SYSTEMES
3
From an assembly document, or a wire frame assembly
4ቤተ መጻሕፍቲ ባይዱ
Create a Simulation and a Replay创建模拟和可播放的文件
The Joint Creation dialog box is displayed 创建联接对话框出现
• Click New Mechanism点击新建机构
The Mechanism Naming dialog box is displayed 新建机构命名对话框出现
• Type a name and click OK输入名字点击OK
Copyright DASSAULT SYSTEMES
Command Angle Length (Length + Angle) OR (Angle or Length)
Length
Length on curve
Angle1 or Angle2 (exclusive) Length1 or Angle2 (exclusive) Length1 or Length2 Angle or Length (exclusive)
Copyright DASSAULT SYSTEMES
6
Creating Joints
•Joints define the behavior between 2 or more components定义2个或多个部件之间的运动形式
•You can define joints on 3D elements as well as Wire frame assembly, in order to validate a Cinematic为使模 拟有效可以在3D装配模型中定义联接
3:Select two lines and two planes选择两直线和两平面 4:Select Line 1 in the geometry area.在几何区域选择直线一 5:Select Line 2 in the geometry area.在几个区域选择直线二 6:Select the planes as shown below:如下选择平面
Copyright DASSAULT SYSTEMES
9
Creating Cylindrical Joints
1:Click the Cylindrical Joint icon from the Kinematics Joints toolbar 。 点击 圆柱联接对话框 2:Click New Mechanism.点击新建机构 3:Select Line 1 in the geometry area. In our example select the Cylinder 1 axis 几何区域中选择直线一 4:Select Line 2 in the geometry area. 几何区域选择直线二 5:Select the Angle driven and Length driven check boxes 选择角度驱动和长 度驱动 6:Click Ok to end the cylindrical joint creation. 点击OK,完成圆柱联接创建
eventually the Mechanism or the Part 结果分析并修改几个或零件
Copyright DASSAULT SYSTEMES
4
Creating Mechanism
You will become familiar with Mechanism definition熟悉机构定义
Copyright DASSAULT SYSTEMES
10
Creating Screw Joints
1:Click Screw Joints icon from the Kinematics Joints toolbar 。 点击螺纹联接 ,命令 2:Click New Mechanism. The Mechanism Creation dialog box is displayed: 点击新建机构 3:Select Line 1 in the geometry area. 几何区域选择直线一 4:Select Line 2, the Part2 cylinder axis:几何区域选择直线二 5:Enter 10 in the pitch field and select the Length driven check box. 输入螺距,选择长度方向驱动 6:Click Ok to end the Universal joint creation.点击OK,完成螺纹联接创建
5
Naming a Mechanism
It is possible to assign a name to a mechanism on the fly in creation mode only给创建的机构进行命名
• Click a Joint icon from the Kinematics‘ Joints Toolbar (first joint of the mechanism) 在运动链接工具条中点击联接命令