3小型四旋翼无人机建模与控制仿真_孟佳东
四旋翼无人机的数学模型控制及操作原理
四旋翼无人机的数学模型控制及操作原理作者:吕传庆陈琪马云波董珮璠摘要:本文对选择四旋翼无人机为研究对象,用数学建模的方法对其动力及运动状态进行分析,对所建动力学模型上进行PID算法控制,仿真结果很好模拟了真实环境下无人机的飞行姿态。
关键字:四旋翼,建模,PID算法。
引言:无人机的发展现状及未来趋势:无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。
在军事上及民用上均有深入发展。
军事上以其体积小、重量轻、机动性好、飞行时间长和便于隐蔽为特点,适合于执行危险性大的任务,已逐渐成为新世纪军事竞争的制高点之一,随着信息时代的发展,现代信息化战争正朝着高精度,高杀伤,高重复利用,隐蔽性方面发展,无人机以其特殊优势很好适应了未来战争中提出的要求,正发挥着越来越大的作用,成为军队实现信息化作战及特种作战的有力武器。
能研制高精尖无人机的国家屈指可数,其中美国处于领先地位,作战无人机包括RQ-1捕食者”,”MQ-9“死神”(Reaper),RQ-5“猎手”等;侦察机包括RQ-4A“全球鹰”,RQ-8A“火力侦察兵”等。
美国曾在伊拉克战争,阿富汗战争中用无人机完成各种监视侦查,目标指示等任务,提供大量情报支持,表现突出,有力的减小了美军伤亡,因此无人机受到美军军事部门高度重视。
现已发展至舰载无人机x-47b。
中国无人机水平也处于世界领先水平,以能研制各种功能齐全的无人机。
如三角翼布局的暗剑无人机,和与捕食者无人机相当的翼龙、彩虹系列无人机。
其中彩虹系列无人机和翼龙系列无人机不但在本国服役,还成功出口到中东及非洲国家,例如伊拉克,埃及,阿联酋。
并在伊拉克投入到对于极端组织的打击,完成了首次实战。
在民用方面,无人机还广泛用于农业,通信救灾,地形勘探等方面。
如今互联网时代的到来,网购成为越来越多90后的选择。
无人机在快递行业局域光辉前景,无人机的发展将给快递行业带来革命性变化。
所以无人机行业的发展无论对于军队装备发展还是经济发展均具有重要意义。
微小型四旋翼无人直升机建模及控制方法研究

目录摘 要 (I)ABSTRACT (II)第一章 绪 论 (1)§1.1课题背景 (1)§1.2国内外研究现状 (1)§1.3本课题研究的科学意义与应用前景 (2)§1.4本文的主要内容 (3)第二章 微小型四旋翼无人直升机建模 (4)§2.1引言 (4)§2.2机体构造与飞行原理 (4)§2.3旋翼空气动力学 (5)§2.3.1旋翼和桨叶的相对气流 (5)§2.3.2空气动力与力矩 (6)§2.4动力系统模型 (11)§2.5微小型四旋翼无人直升机动力学 (12)§2.6本章小结 (15)第三章 基于Backstepping的微小型四旋翼无人直升机控制 (17)§3.1引言 (17)§3.2 Backstepping方法 (17)§3.2.1 Lyapunov稳定性 (17)§3.2.2严格反馈系统 (19)§3.2.3 Backstepping算法及其稳定性证明 (19)§3.3基于Backstepping的飞行控制系统设计 (22)§3.3.1动力学模型 (22)§3.3.2飞行控制系统设计 (23)§3.3.3 Backstepping控制器设计及其稳定性分析 (24)§3.4仿真结果与分析 (29)§3.5本章小结 (32)第四章 基于ADRC的微小型四旋翼无人直升机控制 (33)§4.1引言 (33)§4.2 ADRC基本原理 (33)§4.2.1 ADRC系统结构 (34)§4.2.2 ADRC数学模型 (35)§4.2.3 ADRC收敛性分析 (38)§4.2.4 ADRC典型应用 (38)§4.3基于ADRC的飞行控制系统设计 (39)§4.3.1动力学模型 (40)§4.3.2飞行控制系统设计及其稳定性分析 (40)§4.3.3 ADRC算法及其参数整定原则 (42)§4.4仿真结果与分析 (43)§4.4.1 ADRC控制仿真结果与分析 (44)§4.4.2 PD-ADRC控制仿真结果与分析 (47)§4.5本章小结 (48)第五章 微小型四旋翼无人直升机状态估计 (49)§5.1引言 (49)§5.2 SR-UKF滤波算法 (49)§5.2.1 UT变换 (50)§5.2.2矩阵QR分解与Cholesky分解因数更新 (51)§5.2.3状态估计SR-UKF滤波算法 (51)§5.3微小型四旋翼无人直升机状态估计算法 (53)§5.3.1状态方程与量测方程 (53)§5.3.2仿真实验与分析 (54)§5.4本章小结 (56)第六章 总结与展望 (57)参考文献 (59)硕士期间发表的学术论文 (61)致 谢 (62)摘要微小型四旋翼无人直升机是一种外型新颖、性能卓越的垂直起降无人机,具有重要的军事和民用价值。
四旋翼飞行仿真器的建模及控制方法的研究的开题报告

四旋翼飞行仿真器的建模及控制方法的研究的开题报告开题报告一、选题背景四旋翼无人机作为无人机中最为常见的一种类型,其应用领域十分广泛,包括但不限于:航拍、物流、救援、搜救等。
为了提高四旋翼无人机的飞行性能和安全性,需要对四旋翼无人机进行控制设计和仿真研究。
本文针对四旋翼无人机的飞行控制问题展开研究,探讨四旋翼无人机的建模与控制方法,以提高其飞行能力和稳定性。
二、研究内容1.四旋翼无人机的建模首先,需要对四旋翼无人机进行建模,抽象出合适的数学模型,建立其动力学关系式,同时选取合适的坐标系和传感器测量参数。
在建模过程中,需要考虑到四旋翼无人机的结构、电机和电调参数、传感器和控制器等综合因素,得到能够描述四旋翼无人机运动规律的数学模型。
2.四旋翼无人机的控制方法研究针对四旋翼无人机进行控制设计,探讨多种控制方法,包括PID控制、自适应控制、模糊控制等,根据四旋翼无人机的实际特点和要求,选择合适的控制方法。
同时,基于所选的控制方法,设计合适的控制算法,对四旋翼无人机进行模拟仿真,考察控制方法对四旋翼飞行的影响。
3.四旋翼无人机的仿真平台创建四旋翼无人机的仿真平台,通过建模和控制方法设计的仿真实验和模拟简化实验,验证仿真模型的准确性,研究不同控制方法的效果。
同时,从仿真中,可以得到更加详细的实验数据,并对其进行分析和处理,得出更有价值的结论。
三、研究意义本文的研究将有助于优化四旋翼无人机的飞控系统,提高飞行控制精度和稳定性,进一步提升飞行安全性,同时推动无人机技术的发展。
同时,基于该研究成果,还可以进一步对其他无人机类型进行研究,为无人机控制和应用提供更加详尽的指导和理论基础。
四、研究方法和步骤1.文献调研和资料收集:查阅相关文献和资料,掌握四旋翼无人机的基本原理、控制方法和应用领域。
2.建模与控制方法的设计:根据所学知识,对四旋翼无人机建立数学模型,探讨控制方法和算法,选择合适的控制方案。
3.仿真程序开发:基于四旋翼无人机的数学模型和控制方法,开发相应的仿真程序,进行模拟实验。
四旋翼飞行器姿态控制建模与仿真

1四旋翼飞行器动力学模型的建立
1.1四旋翼飞行器受力分析
对于飞行器的每个旋翼,剖面呈非对称,一旦
旋翼旋转,由于 面空 速比 面快,故上
面受到的空气压力小于 面,
面受到
的压差形成升力,如图1所示。旋翼1、3逆时针
旋转,旋翼2、4顺时针旋转[叶素动量理
论可知,每个旋翼产生的升力*与电机转速!
的平方成正比,即*=+ !('1,2,3,4%,其中+
,
用受
&
[ 5 ]针对传统的离
线性 模 用于四旋翼飞行器控制
、响速度慢、
时间收敛等问题,提
了干扰观测器补偿的
终端滑模控
制,使响应时间更快、 效 更理想、鲁棒性更
强。
[6 ]利用线性扩张状态观测器对四旋翼
飞行器内部不确定干扰和外部干扰进行实时估
计, 采取线性状态反馈控制对扰动的估计值
行在线补偿,以实现四旋翼飞行器的姿态控制。
Abstract: Quadotoo aircraOt was a typOal under-actuated,nonlineat,and strongly coupled system. De attitude control accuracy and anti-disturbanco problem were always research hotspots. In ordet to realize the attitude control of small and low-cost quadotor aircraa,the fores of the quadotor aircraa was analyzed in detait. The nonlinear dynamic model of the quadrotoo was established by using the Newton-Eulerian equation. Aiming at the fact that the quadrotoo aircraft often encountered uncertain extemae disturbances such as gusts and airflow during the actual flight, a PID contollei1 based on small dmturbances was designed. The simulation test and osuW analysis of the MATLAB/Simulink simulation modds of pitch, roH and yzw channels show that the designed contoe algorithm can meet the attitude contml oquiomentr of quadotor aiooy and has better anti-disturbanco peOormanco.
微小型四旋翼无人直升机建模及控制方法研究_61_65
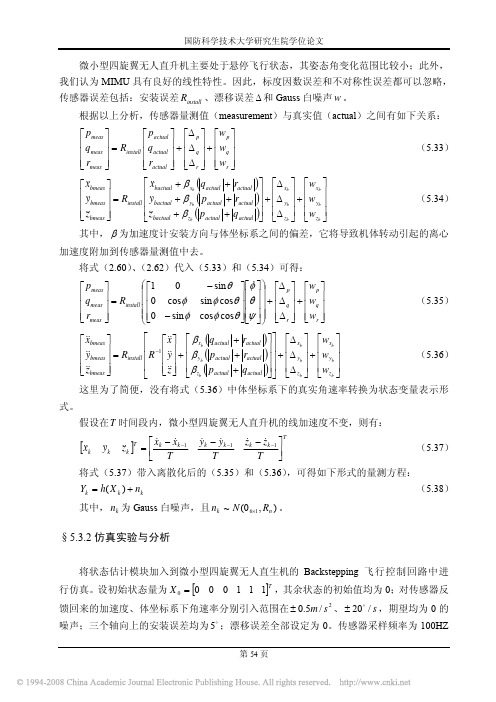
微小型四旋翼无人直升机主要处于悬停飞行状态,其姿态角变化范围比较小;此外, 我们认为 MIMU 具有良好的线性特性。因此,标度因数误差和不对称性误差都可以忽略, 传感器误差包括:安装误差 Rinstall 、漂移误差 Δ 和 Gauss 白噪声 w 。 根据以上分析,传感器量测值(measurement)与真实值(actual)之间有如下关系:
型准确性尚需验证,因此有必要通过在实际系统上进行系统辨识,得出能与数学模型相比 较的辨识模型。
2、控制器设计及实现。论文中提出的控制器设计都是基于连续系统的,而实际的系
统控制器设计必须基于离散系统进行,因此有必要针对实际系统设计进行进一步研究。
3、其它智能控制方法。不论是数学模型还是辨识模型,都不能完整地反映微小型四
加速度附加到传感器量测值中去。 将式(2.60) 、 (2.62)代入(5.33)和(5.34)可得:
(5.34)
其中, β 为加速度计安装方向与体坐标系之间的偏差,它将导致机体转动引起的离心
⎛ ⎡1 0 ⎡ p meas ⎤ ⎜ ⎢q ⎥ = R ⎜⎢ cos φ install ⎢0 ⎢ meas ⎥ ⎜ ⎜⎢ ⎢ ⎣ rmeas ⎥ ⎦ ⎝ ⎣0 − sin φ
1、综述了微小型四旋翼无人直升机的研究现状及相关技术,论述了开展这方面研究
的重要意义。
2、建立了微小型四旋翼无人直升机的数学模型。针对自行研制的微小型四旋翼无人
直升机原型样机,对其旋翼空气动力学、动力系统和刚体动力学进行数学建模,推导出了 全状态非线性系统方程,并将之变换为仿射非线性形式。 针对微小型四旋翼无人直升机的欠驱动特性, 设计了基于 Backstepping 的飞行控制 3、 算法。仿真实验表明该方法能够实现微小型四旋翼无人直升机定点悬停和轨迹跟踪飞行控 制,并具有一定鲁棒性。
微小型四旋翼无人直升机建模及控制方法研究_1_5(3)

Lyapunov 函数。
定义 3-2 (Lyapunov 函数[25])设 V ( x) 是一个正的标量函数,如果 V ( x) 具有性质:
( x) = dV ( x) 是连续的(反映能量变化趋势) V ; dx V ( x) 是正定的(反映能量大小) 。
那么, V ( x) 就成为系统的 Lyapunov 函数。 根 据 以 上 相 关 定 义 , 可 以 引 出 用 来 证 明 系 统 Lyapunov 稳 定 性 的 重 要 定 理 , 即
国防科学技术大学研究生院学位论文
⎡ R11 Ftotxb + R12 Ftotyb + R13 Ftotzb ⎤ ⎤ x ⎡ 1⎢ ⎥ ⎢ ⎥ = ⎢ R21 Ftotxb + R22 Ftotyb + R23 Ftotzb ⎥ y ⎢ ⎥ m ⎢ R31 Ftotx + R32 Ftoty + R33 Ftotz ⎥ ⎢ ⎥ z ⎣ ⎦ b b b ⎦ ⎣ ]T 为地面坐标系中的加速度。 x y z 坐标系三个坐标轴方向的分量, [ ⎤ ⎡( p cosθ + q sin φ sin θ + r cos φ sin θ ) / cosθ ⎤ ⎡φ ⎢ ⎥ ⎢ ⎥ q cos φ + r sin φ ⎢θ ⎥ = ⎢ ⎥ ⎢ψ ⎥ ⎢ ⎥ + ( q sin φ r cos φ ) / cos θ ⎦ ⎣ ⎦ ⎣ ⎤ ⎡ [ M totxb + ( I y − I z )qr ] / I x ⎤ ⎡p ⎢ ⎥ ⎢q ⎥ ⎢ ⎥ = ⎢ [ M totyb + ( I z − I x )rp ] / I y ⎥ ⎥ ⎢ ⎥ ⎣r ⎦ ⎢ ⎣[ M totzb + ( I x − I y ) pq] / I z ⎦
四旋翼无人机控制系统仿真设计

收 稿 日 期 :2018 09 26; 修 回 日 期 :2018 10 26。 基 金 项 目 :山 东 省 西 部 经 济 隆 起 带 基 层 科 技 人 才 支 持 计 划 (XB2018CX008)。 作 者 简 介 :杨 则 允(1982 ),男 ,山 东 济 宁 人 ,工 程 师 ,主 要 从 事 无人飞行器技术方向的研究。
关 键 词 :四 旋 翼 无 人 机 ;系 统 建 模 ;控 制 系 统 设 计 ;Simulink仿 真
犛犻犿狌犾犪狋犻狅狀犇犲狊犻犵狀狅犳犙狌犪犱-狉狅狋狅狉犝犃犞犆狅狀狋狉狅犾犛狔狊狋犲犿
YangZeyun1,LiMeng2,SunQinpeng2
(1.ShandongLongYiAviationTechnologyCo.,Ltd.,Jining 272200,China; 2.SchoolofElectricalEngineering,Jinan University,Jinan 250022,China) 犃犫狊狋狉犪犮狋:Quad-rotorUAVisakindofVTOLunmannedaircraftwithexcellentperformance.Itcancompletethetasksofhove ring,low-speedflight,verticaltakeoffandlanding,whichhasgreatvalueinmilitaryandcivilianaspects.Inviewofthequad-rotor UAVcontrolsystemdesignproblem,theflightprincipleofquad-rotorUAVisanalyzedfirstly.Thendynamicsmodelandkinemat icsmodelisestablished,andthequad-rotorUAVcontrolsystemisdesignedbasedonPIDcontrol.Thecontrolsystemadoptsfour -channel,multi-closed-loopcontrolstructure,includingattitudecontrolandtrajectorycontrolofUAV.Thequad-rotorUAV controlsystemsimulationimplementationandexperimentalresearchiscarriedin MATLAB.Thesimulationresultsshowthatthe controlsystemdesignedinthispapercaneffectivelyachievetheattitudecontrolandtrajectorycontrolofthequad-rotorUAV,with goodcontrolaccuracyandresponsespeed. 犓犲狔狑狅狉犱狊:quad-rotorUAV;system modeling;controlsystemdesign;Simulink
四旋翼无人机控制系统仿真设计
四旋翼无人机控制系统仿真设计摘要:随着科学技术的发展,我国的四旋翼无人机技术有了很大进展。
四旋翼无人机是一种性能优越的垂直起降无人飞行器,能够实现悬停、低速飞行、垂直起降等功能,在军事和民用方面具有重要价值;针对四旋翼无人机的控制系统设计问题,首先分析介绍了四旋翼无人机飞行原理,对其建立动力学模型和运动学模型,然后进行了基于PID控制的控制系统设计,在进行无人机控制系统仿真实现;能够有效地实现四旋翼无人机的姿态控制、轨迹控制,具有良好的控制精度与响应速度。
关键词:四旋翼无人机;系统建模;控制系统设计引言四旋翼无人机飞行控制问题的难点,主要有以下3个方面:1)建立机体准确的动力学模型非常困难,飞行过程中,系统会同时受到多种干扰的影响(如风、地磁和机械的剧烈振动等),因此,精确有效的动力学模型很难建立;2)飞行器控制系统的设计非常困难,小型四旋翼无人直升机具有6个自由度,而只有4个输入量的欠驱动系统,具有不稳定、欠驱动、强耦合、非线性等特性,因此加大了控制系统的设计难度;3)将飞行器姿态信息作为状态反馈量从而实现自主飞行控制是非常困难的。
能否成功解决这3个问题,是实现小型四旋翼无人机自主飞行控制的关键。
本系统以STM32F103C8为主控芯片,通过无线射频模块nRF2401向主控芯片发送起飞、悬停及降落等命令,当其收到命令后,主控芯片通过提取HC-SR04和MPU-6050的信号,利用四元数姿态解算法得出飞行器当前的状态。
1飞行原理四旋翼无人机是一个具有强耦合特性的被控对象,一个旋翼的转速改变将引起最少3个方向上的运动。
当按照不同的策略对旋翼电机转速进行调节时,机身的受力平衡会被打破,使得无人机姿态改变,进而产生相应的运动。
四旋翼无人机在空间中具备的4种基本运动状态。
1)垂向运动:同时增加4个电机的输出功率,旋翼转速增加,总升力增大,四旋翼无人机便离地垂直上升;反之,同时减小4个电机的输出功率,四旋翼无人机则垂直下降,直至平稳落地,实现了无人机的垂直运动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第1期
孟佳东等 : 小型四旋翼无人机建模与控 U2L + ( q x x- z) x 烄 r -τ I I I q = U3L + ( p z- x) y y 烅
( ) 7
r = U4L + ( I I I p q -τ z x- z 烆 y) 、 、 ; 其中 : 分别表示机体绕三轴的转动惯性 I p、 x I z y I r 分别表示无人机相 对 于 机 体 坐 标 系 的 旋 转 角 速 q、 度; τ τ τ x、 z 分别表示空气对无人机在三轴方向上 y、
1 飞行原理
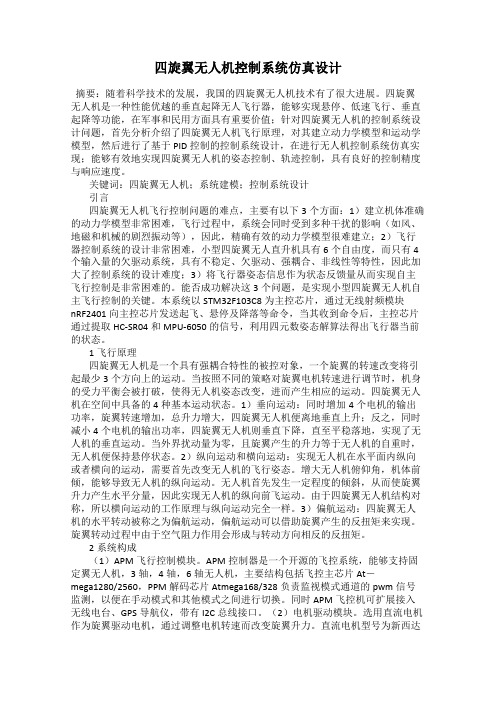
小型四旋翼无人机在平面结构上其呈十字对称 均匀分布 , 其四只 旋 翼 ( 旋 翼 1、 分别位于十 2、 3、 4) 字架结构的前后左右四个端点上 , 分为前后 、 左右两 且飞行时两组旋翼的旋转方向正好相反 : 一组逆 组, ) , ) 时针转动 ( 另一组顺时针转动 ( 四旋翼飞 1, 3 2, 4 . 行器的结构简图如图 1 所示 .
T FE = [ FX , F FZ ] = R·FB = Y, ( C S C S U1 θ ψ +S ψ) 熿 燄 ( ( ) C S C C U1 4 θ ψ -S ψ) C C U1 θ 燀 燅 在地面 坐 标 系 下 , 无人机所受的干扰力和重力
可表示为
K x f 烄 熿 X燄 熿 fX 燄 Kf Y = f y E = f Y 烅 z燅 Kf f Z燅 Z 燀 燀
T T FB = [ F F F 0, 0, U1] x, z] = [ y, 烄 4
2 动力学分析及数学建模
小型四旋翼无人机的数学模型在其运动学和动 力学分析的基础上 建 立 的 , 是飞行控制和仿真的基 由于小型四旋翼 无 人 机 自 身 是 一 个 复 杂 的 运 动 础. 学和动力学系统 , 想要对该系统建立一个准确的数 为了建立一个相对准确的数学模 学模型非常困难 . 型, 对该系统作如下假设 : )视小型四旋翼无人机整体为刚体 , 且完全均 1 匀对称 ; )机体坐标 原 点 B 与 无 人 机 的 质 心 是 完 全 重 2 合的 ; )无人机的螺旋桨为刚体 , 不考虑其结构和弹 3 性形变 ; )假设地面坐标系 E 为惯性坐标系 . 4 在上述假设的前提下 , 为便于建模 , 选择在悬停 对模型进行运动学和动力学分析 . 为方便小 状态下 , 型四旋翼无人机的 运 动 学 和 动 力 学 分 析 , 对其进行 受力分析如图 2 所示 .
/ 4 四旋翼无人机 M a t l a b S i m u l i n k 仿真
无人飞 行 器 自 主 飞 行 一 直 是 航 空 领 域 多年来 , 的研究热点之一 . 垂直/短距起降飞行器由于不受起 降场地的限制 , 具有很强的适应性 , 一直是各国军方 关注 的 焦 点 ; 在 追 求 垂 直/短 距 起 降 的 同 时 , 增强飞 行器的负载能力也 一 直 是 人 们 追 求 的 目 标 之 一 ; 与 此同时 , 研究人员也 一 直 在 寻 求 一 种 简 单 高 效 的 飞 行控制模型来提高 飞 行 器 的 飞 行 性 能 . 小型四旋翼 在 垂 直/短 距 起 降 、 负 无人 机 与 常 规 的 飞 行 器 相 比 , 加之 载能力和飞行控制 原 理 上 都 有 很 强 的 优 越 性 . 近年来 , 微电子 、 微机械技术和计算机技术的飞速发 展, 使的小型四旋 翼 无 人 机 的 体 积 、 重 量、 灵活性和 机动性等多个方面 有 了 很 大 改 观 . 四旋翼无人机是 一种具有六个自由 度 和 四 个 输 入 的 欠 驱 动 飞 行 器 , 属于旋翼式直升机 . 与常规飞行器相比 , 它除了具有 垂直起降 、 着陆 、 悬停 、 纵飞和侧飞等飞行特性以外 , 其在结构上更为简 洁 ; 四旋翼飞行器凭借其结构特 四只旋翼相互抵消反扭矩 , 不需要专门的反扭矩 点, 其具有更简洁的控制方式 , 仅通过改变四只旋翼 桨;
由于 小 型 四 旋 翼 无 人 机 特 殊 的 结 构 , 使其仅通 过调整旋翼的转速 , 使无人机的 4 个顶点受力不同 ,
2 0 1 2 * 收稿日期 : - 0 5 - 2 0 , : 作者简介 : 孟佳东 ( 男, 甘肃宁县人 , 硕士生 , 主要研究方向为飞行机器人 . 1 9 8 8-) E-m a i l l z i d i s 0 7 2@1 2 6. c o m j
6 4
兰
州
交
通
大
学
学
报
第3 2卷
从而改变飞行姿态 . 其各种姿态控制如下 : 悬停状态 时, 四只旋翼转速相同 , 且其升力之和等于直升机自 身重力 ; 垂直上升或下降时 、 保持四只旋翼转速相同 且同时等量增加或等量下降 ; 仰俯或滚转运动时 , 保 另一组旋翼中一只旋翼转速 持一组旋翼转速不 变 , 增加 、 另一只旋翼等量下降 ( 仰俯时 2、 4 保持不变 , 1 ; 增加 , 偏航运 3 降低 ; 1、 3 保持不变 , 4 增加 , 2 降低 ) 动时一组旋翼转速增加 , 同时另一组转速下降 .
)中的 U2 , 的阻力矩 . 式( 7 U3 , U4 如下 :
· · [ ( / x C S C S U1 - KfX m x] θ ψ +S ψ) 烄 = · · ( / C S C S U1 - Kf m θ y=[ y] Y ψ -S ψ) · · ( / z=[ z -m C C U1 - Kf m θ g] Z
*
摘 要: 小型四旋翼无人机是一种具有六个自由度和 四 个 输 入 的 欠 驱 动 强 耦 合 飞 行 器 , 四只旋翼对称均匀分布在 十字架结构的四个端点上 , 仅通过改变四只旋翼的转 速 即 可 改 变 飞 行 姿 态 . 基于微型四旋翼无人机特有的机械结 构和飞行原理 , 为提高其飞行性能和控制的稳定性 , 利用牛顿 — 欧拉方程 , 建立小 型 四 旋 翼 飞 行 器 的 非 线 性 动 力 学 / 并针对该模型设计一解耦 P 且在 M 对该 P 方程 , I D 四通道控制 系 统 , a t l a b S i m u l i n k仿真平台上, I D 控制系统进行 仿真 . 仿真结果表明 : 通过改变旋翼的转速可实现四旋翼飞行器姿态的控制 , 同时该非线性模 型 和 P I D 控制系统为 其后续的四旋翼无人机的控制研究奠定了一定的基础 . 关键词 : 四旋翼无人机 ; 飞行原理 ; 动力学模型 ; 模型仿真 中图分类号 : T P 2 7 3 文献标志码 : A
T4 Z T3 准 T2 Z E Y X B G 兹 鬃 y x T1
U1 = 烅
∑T
i =4
i
( ) 2
2 T Ωi i = KT 烆 其中 : i 表示表示相应的旋翼 .
根据坐标转换原理可得到地面坐标系 E 移动到
3] 机体坐标系 B 的转换矩阵为 [
CC S S C CS C S C SS 燄 熿θ ψ θ ψ - ψ θ ψ + ψ R= C C S C S S S C θ θ θ ψ S ψ +C ψ C ψ -S ψ S S C C C - θ θ θ 燀 燅 ( ) 3
1 - 2] 的转速即可实现各种姿态控制 [ .
在对小型四旋翼无人 和非线性等特性的 复 杂 系 统 . 机位姿控制研究时 , 为了缩短研究周期和研究费用 , 对该系统进行建模研究 , 并对其进行仿真分析 . 由于 悬停模式是飞行器 的 最 基 本 和 最 关 键 的 飞 行 姿 态 , 本文基于悬停模式 进 行 建 模 , 并基于近似扰动观点 / 建立模型的状 态 空 间 方 程 , 在M a t l a b S i m- u l i n k平 台上 , 对模型的悬停模式进行了 P I D 控制仿真 .
( ) 5
图 2 小型四旋翼无人机受力图 F i . 2 F o r c e d i a r a m o f m i c r o u a d r o t o r U A V g g q
T GE = [ 0 0 m g] 烆 在地面坐标系下 , 利用牛顿第二定律 F = m a,
结合空气 动 力 学 和 螺 旋 桨 知 识 可 将 螺 旋 桨 的 推力 T、 空气阻力 f、 螺旋桨的转矩 M 和阻力矩τ 分 别表示为
2 T = KT Ω 烄 S f = Kf 烅 M = KMΩ2 τ = Kτ ζ 烆
) 、 )可得 : 结合式 ( 式( 4 5
· · · · · · T ( ) m[ x y z] 6 = FE -f E -G E 由于旋 翼 轴 半 径 和 质 量 小 , 所以可近似旋翼轴
上的转动惯量为零 ; 小型四旋翼无人机的机械结构 ( ) 1 是完全均匀对称的 , 则I 借助于机 I I x z、 x z 皆为零 . y、 y 体坐标系下的受力分 析 简 图 , 可得到绕三个轴的力
其中 : KT 表示螺 旋 桨 推 力 系 数 ; Ω 表示螺旋桨的转 速; Kf 表示空气 阻 力 系 数 ; KM 表 示 S 表 示 线 速 度;
表 螺旋桨的转矩系数 ; Kτ 表示空气的阻力矩系数 ; ζ
示角速度 . 根据力学知识和图 2 受力分析可得到机体坐标 系下无人机整体受到的升力为
烅 / U2 - Kτ I ( X ) x
· · ·
· ·
·
( ) 1 2
/ U3 - Kτ I θ( Y θ) y
· · ·
/ U4 - Kτ I Z ψ) z 烆 ψ(
U2 = ( T4 -T2) L 烄 T3 -T1) L U3 = ( 烅
2 2 2 2 U4 = KM ( Ω2 +Ω4 -Ω1 -Ω3) 烆 其中 : L 是旋翼中心到机体重心之间的距离 . T 由于机体 坐 标 系 下 的 角 速 度 [ 与地面 r] p, q, [ T 5] ] 坐标下的角速度 [ , θ, ψ 之间有如下关系 :