同名核线的确定
摄影测量学总复习
(一)名词解释(1)摄影测量:摄影测量是利用摄影所获得的影像来测定目标物的形状、大小、位置、性质和相互关系的一门学科。
(2)摄影比例尺:摄影像片水平、地面取平均高程时,像片上的线段l与地面上相应的水平距L之比。
(3)地面采样间隔(Ground Sample Distance, GSD):指的是数字影像上一个像素所对应的地面尺寸。
(4)航向重叠度:相邻像片在航线上的重叠度。
(5)旁向重叠度:相邻航线之间像片的重叠度。
(6)像片倾斜角:摄影瞬间摄影机主光轴与铅垂线的夹角。
(7)摄影基线:航向相邻的两个摄站之间的距离。
(8)航线间隔:相邻航线之间的距离。
(9)像片旋偏角:相邻像片的像主点连线与像幅沿航线方向的两框标连线之间的夹角。
(10)中心投影:所有投射线或其延长线都通过一个固定点的投影,叫做中心投影。
(11)透视变换:两个平面之间的中心投影变换,称为透视变换。
(12)相对航高:指摄影飞机在摄影瞬间相对于所测区域的平均高程面的高度。
(13)像片内方位元素:确定投影中心与像片之间相对位置的参数。
(14)像片外方位元素:确定像空系在地面辅助坐标系中位置和方向所需要的元素。
(15)像片倾斜误差:同摄站同主距的倾斜像片和水平像片沿等比线重合时,地面点在倾斜像片上的像点与相应水平像片上像点之间的直线移位。
(16)像片投影误差:当地面有起伏时,高于或低于所选定的基准面的地面点的像点,与该地面点在基准面上的垂直投影点的像点之间的直线移位。
(17)单像空间后方交:根据影像覆盖范围内一定数量的分布合理的地面控制点(已知其像点和地面点的坐标),利用共线条件方程求解像片外方位元素。
(18)立体像对:由不同摄站获取的,具有一定影像重叠的两张像片。
(19)同名像点:物方任意一点分别在左右两张影像上的构像点。
(20)左右视差:同名像点在各自像平面坐标系中的横坐标之差。
(21)上下视差:同名像点在各自像平面坐标系中的纵坐标之差。
(武汉大学)摄影测量学教学课件-第二章-第三节-同名核线的确定与重采样

′ g0 (k, c) = g′(x0 , y0 ) ′ g0 ((k +1), c) = g′(x1, y1)
二.基于共面条件的同名核线几何关系
直接 直接 在倾 在倾 斜影 斜影 像上 像上 获取 获取 核线 核线 影像 影像
a1 l1 S1 S2
a2 l2
A
示意图
z y
w v x
s1
s2
u
P
BY = B Z = 0
vp v
wp w
=0
v = b1 x + b 2 y b 3 f w = c1 x + c 2 y c 3 f
y = ( A/ B)x + (C / B) f
A = v p c1 w p b1 B = w pb2 v pc2 C = w pb3 v pc3
线性内插示意图
v = 某常数即表示某一核线
(0,n)
k
(m,n)
C=v v (0,0) (m,0)
u
(u,c) (2u,c) (3u,c)
(u,c) (2u,c)
(3u,c)
+ + + + b1v b3v b2v b3v c1 f c3 f c 2 f c3 f
a 1u x = f a 3u a 2u y = f a 3u
k
y1
核线
线
内
5.核线的重排列(重采样)
线性内差
1 d = [( y 1 ) d 1 + y 1 d 2 ]
最邻近法
n = 1/tgK n = 1/tgK
对每条核线 而言K是常数Biblioteka �ys f
f
a b
物面
摄影测量学习题答案

摄影测量学习题一、名词解释:1、摄影测量学:摄影测量学是对研究的对象进行摄影,根据所获得的构像信息,从几何方面和物理方面加以分析研究,从而对所摄对象的本质提供各种资料的一门学科。
2、光圈号数×3、景深:光于点A,但在远景B和近景C之间这一段间隔内所有景物,在像面上仍可认为获得了清晰的构像。
此时,远景与近景之间的纵深距离称为景深4、超焦点距离:当物镜向无限远物体对光时,不仅远处的物体构象清晰,而且在离开物镜不小于某一距离H的所有物体,其构象都很清晰,这个距离H就称为超焦点距离或称为无限远起点。
5、视场×6、视场角×7、像场×8、像场角×9、反差系数×10、感光度×11、航向重叠(p):沿飞行方向上相邻像片所摄地面的重叠区.12、旁向重叠(q):两相邻航带摄区之间的重叠。
13、摄影基线(B):相邻像片摄影站(投影中心)之间的空间连线.14、透视旋转定律×15、内方位元素:确定物镜后节点和像片面相对位置的数据。
包括像主点在像片框标坐标系中的x0 坐标、y0和像片主距f。
16、外方位元素:确定摄影摄影机或像片的空间位置和姿态的参数,亦即摄影光束空间位置和姿态的数据。
17、航向倾角×18、旁向倾角×19、像片旋角×20、倾斜误差:因像片倾斜引起的像点位移.21、投影差:因地形起伏引起的像点位移。
22、摄影比例尺:构像比例尺:航摄像片上某一线段构像的长度与地面上相应线段水平距离之比.23、像片控制点:测定了地面坐标的像点24、像片判读×25、左右视差26、上下视差27、核点:基线延长线与左、右像片的交点k1、k2称为核点。
28、核线:核面与像片的交线称为核线29、核面:通过摄影基线S1S2与任一地面点A所作的平面W A,称为点A的核面。
30、投影基线:将摄影B缩小到若干分之一作为投影基线b.31、像片基线32、解析空中三角测量:是将建立的投影光束、单元模型或航带模型以至区域模型的数学模型,根据少量地面控制点,按最小二乘法原理进行平差计算,解求出各加密点的地面坐标。
摄影测量学复习资料

一、名词解释1、中心投影:投影射线会聚于一点的投影称为中心投影。
2、外方位元素:表示摄影中心和像片在地面坐标系中空间位置和姿态的参数。
3、同名核线:核面与两像片面的交线为同名核线。
4、绝对定向:借助已知的地面控制点,对相对定向建立的模型进行旋转、平移与缩放,使其纳入到地面摄影测量坐标系中。
5、像片纠正:将原始的航摄像片经过投影变换,使变换后得到的影像相当于水平像片的构像,并改化至图比例尺;或应用数学关系式进行解算从原始非正射的数字影像获取数字正射影像。
6、摄影基线:航线方向相邻两摄站点间的空间距离称为摄影基线。
7、内方位元素:确定摄像机的镜头中心相对于影像位置关系的参数。
8、相对定向:确定一个立体像对两像片之间相对位置。
9、核线相关:利用立体像对左、右核线上的灰度序列进行的影像相关。
二、填空题1、摄影测量的发展经历了模拟摄影测量、解析摄影测量、数字摄影测量三个阶段。
2、美国快鸟(Quick bird)卫星影像的全色分辨率为61cm。
3、航向重叠度一般要求的取值范围为30%~40%,旁向重叠度一般要求的取值范围为30%~40%。
4、摄影测量常用的坐标系统有:像平面直角坐标系、像空间直角坐标系、像空间辅助坐标系、地面摄影测量坐标系、地面测量坐标系。
5、模拟法立体测图,解析法立体测图,数字化立体测图包含的基本过程都是内定向、相对定向、绝对定向和测图。
6、相对定向建立的标志是:同名光线对对相交。
7、绝对定向元素有7个, 求解它至少需要2个平高控制点和1个高程控制点。
8、数字影像内定向的目的是:确定扫描坐标系与像平面坐标系之间的关系。
9、光束法区域网平差的的平差单元是:单个光束。
三、判断题1、航摄像片上任何一点都存在像点位移。
(√)2、航摄像片上的影像比例尺处处相等。
( × )3、主垂线与像片面的交点称为像底点。
( √ )4、地面测量坐标系是左手系。
( √ )5、立体像对的相对定向元素有5个。
( √ )6、利用单张像片能求出地面点坐标。
摄影测量学复习要点

1像片比例尺:航摄像片上一线段为l的影像与地面上相应线段的水平距离L之比。
2绝对航高:是相对干平均海平面的航高,是指摄影物镜在摄影瞬间的真实海拔高度。
3相对航高:是指摄影机物镜相对于某一基准面的高度,常称为摄影航高。
是确定航摄飞机飞行的基本数据,按H=mf计算得到。
4中心投影:投影光线会聚于一点的投影称为中心投影。
5平行投影:投影光线相互平行的投影为平行投影。
6像点位移:由于在实际航空摄影时,在中心投影的情况下,当航摄的飞行姿态出现较大倾斜即像片有倾斜,地面有起伏时,便会导致地面点在航摄像片上构像相对于在理想情况下的构像,产生了位置的差异,这一差异称为像点位移。
7摄影基线:航线方向相邻两个摄影站点间的空间距离。
8航向重叠:同一条航线上相邻两张像片的重叠度。
9旁向重叠:相邻航线相邻两像片的重叠度10像片倾角:摄影瞬间摄影机的主光轴近似与地面垂直,偏离铅垂线的夹角小于2度~3度,夹角为像片倾角。
11像片的方位元素:确定摄影瞬间摄影物镜(摄影中心)与像片在地面设定的空间坐标系中的位置与姿态的参数,即确定这三者之间相关位置的参数。
12像片的内方位元素:表示摄影中心与像片之间相互位置的参数,f,x0,y013像片的外方位元素:表示摄影中心和像片在地面坐标系中的位置和姿态的参数。
14相对定向:根据立体像对内在的几何关系恢复两张像片之间的相对位置和姿态,使同名光线对对相交,建立与地面相似的立体模型。
即确定一个立体像对两像片的相对位置。
15绝对定向元素:描述立体像对在摄影瞬间的绝对位置和姿态的参数称~16单像空间后方交会:利用至少三个已知地面控制点的坐标,与其影像上对应三个像点的影像坐标,根据共线条件方程,反求该像片的外方位元素。
17空间前方交会:由立体像对中两张像片的内、外方位元素和像点坐标来确定相应地面点的地面坐标的方法,称为空间前方交会。
18双像解析摄影测量:按照立体像对与被摄物体的几何关系,以数学计算方式,通过计算机解求被摄物体的三维空间坐标的方法,称为双像解析摄影测量。
摄影测量考试资料
第一章1 摄影测量学:是利用光学摄影机获取的像片,经过处理以获取被摄物体的形状、大小、位置、特性及其相互关系的一门学科。
2 摄影测量学的主要任务:测制各种比例尺的地形图,建立地形数据库,为地理信息系统,各种工程应用提供基础测绘数据。
3 摄影测量学发展的三个阶段:模拟摄影测量,解析摄影测量 ,数字摄影测量。
第二章1 航空摄影机具有框标目的:是建立像片的直角框标坐标2摄影机主距 :摄影机物镜的中心到像主点的垂距,基本上等于物镜焦距。
一般用f 表示3像场内,圆内接正方形或矩形称为最大像幅,尺寸:18X18cm,23X23cm,30X30cm第三章1 摄影比例尺(像片比例尺):航摄像片上一线段为l 与地面上相应线段的水平距L 之比。
2 当取摄区内的平均高程面作为摄影基准面时,摄影机的物镜中心至该面的距离为摄影行高,用H 表示。
f 为摄影机主距,H 为航高3 航向重叠:同一航线内相邻像片上具有同一地区影像的部分一般情况下,要求航向重叠度最小不能少于53%,最好为60%-65%旁向重叠:相邻航线的相邻像片上具有同一地区影像的部分一般情况下,旁向重叠度不得少于15%,保持在30%-40%之间。
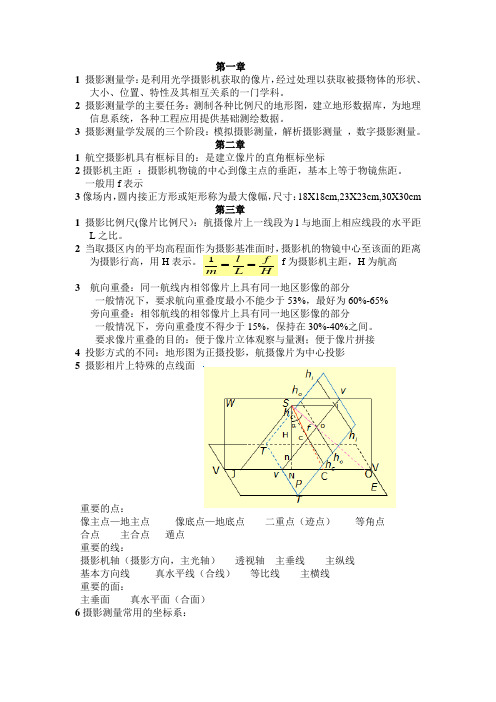
要求像片重叠的目的:便于像片立体观察与量测;便于像片拼接4 投影方式的不同:地形图为正摄投影,航摄像片为中心投影5 摄影相片上特殊的点线面重要的点:像主点—地主点 像底点—地底点 二重点(迹点) 等角点 合点 主合点 遁点重要的线:摄影机轴(摄影方向,主光轴) 透视轴 主垂线 主纵线基本方向线 真水平线(合线) 等比线 主横线重要的面:主垂面 真水平面(合面)6摄影测量常用的坐标系:H f L l m ==1像方坐标系:用于描述像点的位置。
1像平面坐标系:是以象主点o 为坐标原点x 、y 轴分别平行于框标坐标系的x 、y 轴。
2像空间坐标系:原点:投影中心S 坐标轴:Z 轴与摄影方向So 重合,朝上为正方向;x 和y 轴分别平行于像平面坐标的相应轴,方向一致。
名词解释
36. 解析空中三角测量:根据影像上量测的像点坐标及少量控制点的大地坐标,求出未知点的大地坐标,使得已知 点增加到每个模型中不少于四个,然后利用这些已知点求解影像的外方位元素,因而解析空中三角测量也称为 摄影测量加密。
37. 解析空中三角测量的分类。 A、 根据平差中采用的数学模型可以分为航带法、独立模型法、光束法; B、 根据平差范围的大小可以分为单模型法、单航带法、区域网法。
B. 解析空中三角测量光束法平差中基本数学模型;
C. 摄影测量中的数字投影基础;
D. 计算模拟影像数据;
E. 利用数字高程模型与共线方程制作正射影像;
F. 利用 DEM 与共线方程进行单幅影像测图,等。
16、影响内定向:数字摄影测量中,利用平面相似变换等公式,将扫描坐标系转换为像平面坐标系的过程。
17、单向空间后方交会:利用影像覆盖范围内一定数量的控制点的空间坐标与影像坐标,根据共线条件方程,反求
B、 单独像对相对定向法:以左摄影中心为原点、左主核面为 XZ 平面、摄影基线为 X 轴的右手空间直角坐标系。
24. 摄影基线:相邻两摄站的连线。
25. 立体像对:在不同摄站上对同一地区摄影取具有重叠的连续的两张像片。
26. 同名光线:同一地面点发出的两条光线。
27. 同名像点:同名光线在左、右两张影像上的构像(交点)。
28. 核面:摄影基线与某一个地面点组成的平面。
29. 同名核线:核面与左右像片面的交线。确定同名核线的方法:基于数字影像的几何纠正和基于共面条件。
30. 共面条件方程:B(R1 × R2) = 0(B、R 均为向量) 共面条件方程作用:a、确定同名核线;b、确定相对定向元素。
31. 立体像对空间前方交会:由立体像对左右两影像的内、外方位元素和同名像点的影像坐标量测值来确定该点的 物方空间坐标,称做立体像对的空间前方交会。(注:点投影系数的推导)
摄影测量学复习资料(全)分析解析

一、名词解释1、解析相对定向:根据同名光线对对相交这一立体相对内在的几何关系,通过量测的像点坐标,用解析计算方法解求相对定向元素,建立与地面相似的立体模型,确定模型点的三维坐标。
2、GPS辅助空中三角测量:将基于载波相位观测量的动态 GPS 定位技术获取的摄影中心曝光时刻的三维坐标作为带权观测值,引入光束法区域网平差中,整体求解影像外方位元素和加密点的地面坐标,并对其质量进行评定的理论和方法。
3、主合点:地面上一组平行于摄影方向线的光束在像片上的构像4、核线:立体像对中,同名光线与摄影基线所组成核面与左右像片的交线。
5、航向重叠:同一条航线上相邻两张像片的重叠度。
6、旁向重叠:两相邻航带摄区之间的重叠。
7、影像匹配:利用互相关函数,评价两块影像的相似性以确定同名点8、影像的内方元素:是描述摄影中心与像片之间相关位置的参数。
9、影像的外方元素:描述像片在物方坐标的位置和姿态的参数。
10、景深:远景与近景之间的纵深距离称为景深11、空间前方交会:由立体像对中两张像片的内、外方位元素和像点坐标来确定相应地面点的地面坐标的方法,称为空间前方交会。
12、空间后方交会:利用一定数量的地面控制点,根据共线条件方程或反求像片的外方位元素这种方法称为单张像片的空间后方交会。
13、摄影基线:相邻两摄站点之间的连线。
14、像主点:像片主光轴与像平面的交点。
15、立体像对:相邻摄站获取的具有一定重叠度的两张影像。
16、数字影像重采样:当欲知不位于采样点上的像素值时,需进行灰度重采样。
17、核面:过摄影基线与物方任意一点组成的平面。
18、中心投影:所有投影光线均经过同一个投影中心。
19、单模型绝对定向:相对定向所构建的立体模型经平移、缩放、旋转后纳入到地面坐标系中的过程相对定向:根据立体像对内在的几何关系恢复两张像片之间的相对位置和姿态,使同名光线对对相交,建立与地面相似的立体模型。
即确定一个立体像对两像片的相对位置。
20、数字影像内定向:同一像点的像平面坐标与其扫描坐标不相等,需要加以换算,这种换算称为数字影像内定向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
同名核线的确定: 1)基于数字影像几何纠正的核线关系 在水平像片上,同一核线上的像点其坐标 值v 为常数,以v=c 代入得 若以等间隔取一系列的u 值, Δ ,2Δ ,… k Δ ,(k+1) Δ …,即得一 系列的像点坐标(x1,y1), (x2,y2), (x3,y3),这些点都在左方倾斜像片P 的核线上。
同样在右片上由于在“水平”像片上,右片的同名核线的v 坐标相等,以v ’=v =c 代入右片共线方程
得:
2、基于共面条件的核线关系
这个方法从核线的定义出发,直接在倾斜像片上获得同名
核线。
假定在左片目标区选定一个像点a(xa,ya), 确定过a 点
的核线l 和右片搜索区内同名核线l ’。
要确定l ,需要
确定其上另一点b(xb,yb);要确定l ’,需要确定两个点
a ’(x ’a,y ’a) 和
b ’(x ’b,y ’b)
a 和a ’、
b 和
b ’不要求是同名点。
由于同一核线上的点均位于同一核面内,设b 为过a 点核线l 上任一点,则满足三线ss ’、sa 、sb 共面条件。
用公式表示为
右像片
⎪⎪⎭⎪⎪⎬⎫++=++=11321321u e e u e y u d d u d x ⎪⎪⎪⎪⎭
⎪⎪⎪⎪⎬⎫-+-+-=-+-+-=f c v b u a f c v b u a f y f c v b u a f c v b u a f x 333222
333111''''''''''''''''''''''⎪⎪⎭⎪⎪⎬⎫++=++=1''''''1''''''321321u e e u e y u d d u d x ⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫-+-+-=-+-+-=f c v b u a f c v b u a f y f c v b u a f c v b u a f x 3332223331110
1=⨯⋅)S a (S B 1b 000==b b a a
b b b a a a Z Y Z Y B
Z Y X Z Y X B b a b a f y x c c c b b b a a a Z Y X ,321321321,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡b b a a Z Y Z Y =f
b y b x b Y b b b 321-+=f
c y c x c Z b b b 321-+=f c y c x c f b y b x b Z Y b b b b a a 321321-+-+=f c Y b Z c Y b Z x c Y b Z b Z c Y y a a a a b a a a a b 22332211--+--=f B C x B A y b b +=02='⨯⋅)a S a (S B 1000=''=''''''
''a a a a a a a a a a Z Y Z Y B Z Y X Z Y X B f c Y b Z c Y b Z x c Y b Z b Z c Y y a a a a a a a a a a 22332211'
-''-'+''-''-'='''
Autocad的等高线图如何生成数字地面模型
1.在cad中把DMG格式的数字地图(100-2A)转换为文件;
2. 打开GeoTin软件,选择文件、数据格式,出现文件格式选择对话框,选择选项,单击确定;
3.在出现的选择层列表中选择等高线,在未处理栏中双击等高线,确定;
4.打开,出现原始数字化等高线对话框,键入比例尺分母500和等高线距,单击确定出现离散的等高线图;
5.单击设置、设置查找的距离容差,键入距离为1m,单击确定;
6.单击数据处理、编辑原始等高线,键入等高线的高程;
7.重复第六部直到所有赋值完毕;8.单击数据处理、三角形联网,建立不规则三角网;9.编辑不规则三角网(加线点);10.单击数据处理,在随机格式转换窗口键入坐标范围建立格网DEM。
怎样用两张航空影像图生成正射影像图或DEM
1.在virtuozo中输入图像;
2.格式转换;
3.内定向(处理→模型定向→内定向→接受→调整框标位置→保存退出);
4.相对定向(处理→模型定向→相对定向→图上左击鼠标出现小白图→点击自动相对定向→自动定义最大作业区→绿色范围为作业区,在左右范围内分别用鼠标点击一个控制点,然后再分别点击→调整左右控制点,输入控制点确定);
5.绝对定向(处理→模型定向→绝对定向→调整区配误差大的控制点);
6.保存退出;
7.生成核线影像(右击→生成核线影像→非水平核线);
8.处理影像区配,影像区配后点击区配结果的编辑,出现编辑画面在图上右击鼠标出现红色区域图,用绿线将房屋圈出,再右击鼠标出现红框结束定义作业区,点击置平;
9.多次操作后点退出。