数控技术与装备 第三版 韩建梅主编 第一章课后习题
数控加工工艺与编程习题答案完整版
第1章数控机床基础知识1-1数控机床具有哪些特点?1、具有柔性化和灵活性。
当改变加工工件时,只要改变数控程序即可,所以合适产品更新换代快的要求。
2、可以采用较高的切削速度和进给速度(或进给量)。
3、加工精度高,质量稳定。
数控机床本身精度高,此外还可以利用参数的修改进行。
精度校正和补偿。
1-2数控机床由哪几部分组成?1、程序及程序载体。
数控装置由数控机床自动加工工件的工作指令组成。
包括切靴过程中所需要的机械运动,工件,轮廓,尺寸。
工艺参数等加工信息。
2、输入装置。
输入装置的作用是将程序载体上的数控代码信息转化成相映的电脉冲信号。
并传送至数控装置的储存器。
3、数控装置。
数控装置是数控机床的核心。
包括微型计算机,各种接口电路,显示器。
和硬件及相应软件。
4、强电控制装置。
5、伺服控制装置。
6、机床的机械部件。
1-3伺服控制装置的主要作用是什么?伺服控制装置主要完成机床的运动,其运动控制。
包括进给运动主轴,运动位置控制等。
1-4先进制造技术包括哪些内容?1-5数控机床按伺服控制系统和加工运动轨迹方式分为哪几类,各有什么特点?一、按控制方式分最常用的数控机床可分为以下三类:1、开环数控机床,这类机床通常为经济型、中小型数控机床。
具有结构简单,价格低廉,调试方便等优点。
但通常输出的转距大小受到限制,而且当输入的频率较高时,容易湿不男女,实现运动部件的控制,因此已不能完全满足数控机床提高功率。
运动速度和加工精度的要求。
2、闭环数控机床,相比开环数控机床,闭环数控机床的精度更高。
速度更快,驱动功率更大,但是这类机床价格昂贵,对机床结构及传动链依然提出了严格的要求。
3、半闭环数控机床。
半闭环数控机床可以获得比开环系统更高的加工精度。
但由于机械传动链的误差无法得到消除或校正。
因此它的位移精度比闭环系统低,大多数数控机床采用半闭环控制系统。
二、按机械加工运动轨迹方式分类1、点位控制数控机床(孔加工)点位控制数控机床的要求点在空间的位置准确。
数控技术课后完整答案
数控技术课后完整答案1.1数控机床的工作流程是什么?数控加工程序的编制,输入,译码,刀具补偿,插补,位置控制和机床加工1.2数控机床有哪几部分组成?各部分的基本功能是什么?输入输出设备:主要实现程序编制、程序和数据的输入以及显示、存储和打印。
数控装置:接收来自输入设备的程序和数据,并按输入信息的要求完成数值的计算、逻辑判断和输入输出控制等功能。
(多坐标控制,插补功能,程序输入、编辑和修改功能、故障自诊断功能、补偿功能、信息转换功能、多种加工方式选择、辅助功能、显示功能、通信和联网功能)1.3什么是点位控制、直线控制、轮廓控制数控机床?三者如何区别?点位控制数控机床点位控制是指道具从某一位置移到下一个位置的过程中,不考虑其运动轨迹,只要求道具能最终准确达到目标位置。
直线控制数控机床这类数控机床不仅要保证点与点之间的准确定位,而且要控制两相关点之间的位移速度和路线。
轮廓控制数控机床这类机床的数控装置能够同时控制两轴或两个以上的轴,对未知和速度进行严格的不间断控制。
区别:点位控制不考虑运动轨迹,直线控制要求保证两点之间的精确定位,轮廓控制对于位置和速度有严格的要求。
1.4数控机床有哪些特点?加工零件的适应性强,灵活性好;加工精度高,产品质量稳定;生产率高;减少工人劳动强度;生产管理水平高1.5按伺服系统的控制原理分类,分为哪几类数控机床?各有何特点?开环控制的数控机床受步进电动机的步距精度和工作频率以及传动机构的传动精度的影响,速度和精度都较低。
结构简单、成本较低、调试维修方便闭环控制的数控机床定位精度高、速度调节快,工作台惯量大所以系统设计和调整存在困难,系统稳定性受到不利影响半闭环控制的数控机床控制精度没有闭环高,但机床工作的稳定性却有毒大惯量工作台被排除在控制环外而提高,调试方便什么是控制编程?手工编程的内容有哪些?从零件图样到制成控制介质的全部过程。
分析零件图样,确定加工工艺过程,数值计算,编写零件加工程序,制作控制介质,程序校验,试切削数控编程有哪几种方法?各有何特点?手工编程对于几何形状较为简单的零件,数值计算较简单,程序段不错,采用手工编彻骨较容易完成,而且经济、及时。
习题册答案-《数控机床编程与操作(第三版 数控车床分册)习题册》-A02-9048

坐标点 „
G01 X0 Z0 F100;
G01 X20.0 R-5.0;
G01
Z-25.0;
G01 X40.0 C-2.0;
„
G01 X0 Z0 F100;
G01 X20.0 RND=5.0;
G01
Z-25.0;
G01 X40.0 CHF=2.828;
„
O点 A点 B点 C点 „
第六节 基础编程综合实例
1.
执行的程 起点坐标 终点坐标
序段号
(X、Y)
(X、Y)
N50 100.0,100.0 52.0,2.0
圆弧半径 mm
进给速度 mm/min
1500
N60
52.0,2.0 20.0,2.0
1500
N70
20.0,2.0 20.0,-15.0
1500
N80
20.0,-15.0 25.0,-20.0
5.0
5
X Z :为圆弧的终点坐标值,其值可以是绝对坐标,也可以是增量坐 标。在增量方式下,其值为圆弧终点坐标相对于圆弧起点的增量值。
R:为圆弧半径。在 SIEMENS 系统中,圆弧半径用符号“CR=”表示。 I J K :为圆弧的圆心相对其起点并分别在 X、Y 和 Z 坐标轴上的增量 值。
判断方法:处在圆弧所在平面(如 ZX 平面)的另一根轴(Y 轴)的正方向
2
单。(5)制作控制介质。(6)程序校验。
第三节 数控车床编程基础知识
一、填空题 1.刀具 工件 2.刀具 工件 3.X 轴 Y 轴 Z 轴 4.水平 Z 轴 5.刀 架 极限点 6.工件 基准点 7.卡盘中心 正向极限点 8.刀具 工件 9.程序号 程序内容 程序结束 10.程序段 指令 11.M02 M30 12.字 —地址 使用分隔符 固定 13.英文字母 特殊文字 数字构成 14.准备功 能字 尺寸功能字 辅助功能字 进给功能字 刀具功能字 主轴功能字 15.先后顺序 程序段号 16.O 四位数字 二、是非题 1.× 2.× 3.√ 4.× 5.× 6.× 7.√ 8.√ 9.× 10.√ 11.√ 12.× 13.√ 14.√ 15.× 16.× 三、选择题 1.A 2.D 3.C 4.C 5.B 6.A 7.C 8.D 9.C 10.B 四、名词解释 1.为了确定机床的运动方向和移动距离,就要在机床上建立一个坐标系, 这个坐标系就叫机床坐标系,也叫标准坐标系。 2.机床原点(亦称为机床零点)是机床上设置的一个固定的点,即机床坐 标系的原点。 3.机床参考点是数控机床上一个特殊位置的点,一般位于刀架正向移动的 极限点位置, 并由机械挡块来确定其具体的位置。 4.针对某一工件并根据零件图样建立的坐标系称为工件坐标系(亦称编程 坐标系)。 五、简答及计算题 1.数控车床工件坐标系原点 X 向一般选在工件的回转中心,而 Z 向一般选 在完工工件的右端面或左端面。 2.根据主轴先确定 Z 轴,然后再确定 X 轴,最后确定 Y 轴。 Z 坐标方向:对任何具有旋转主轴的机床,其主轴及与主轴轴线平行的坐标 轴都称为 Z 坐标轴(简称 Z 轴),刀具远离工件的方向为该轴的正方向。
数控装备设计 各章习题答案
讨论题: 1、步进电机的主要特征是什么?基本工作状态是怎样的? 2、测量装置的作用是什么? 3、增量测量和绝对测量有何区别? 4、简述直流电动机的调速原理和调速方式? 5、简述旋转变压器工作原理,它有几种型式?
第4章
习题:
1、某些指令一旦写入程序中,在后续程序段中会一直有效,直到出现同组指令,才会被取
O
BC
Y
D
α
GK
A
X
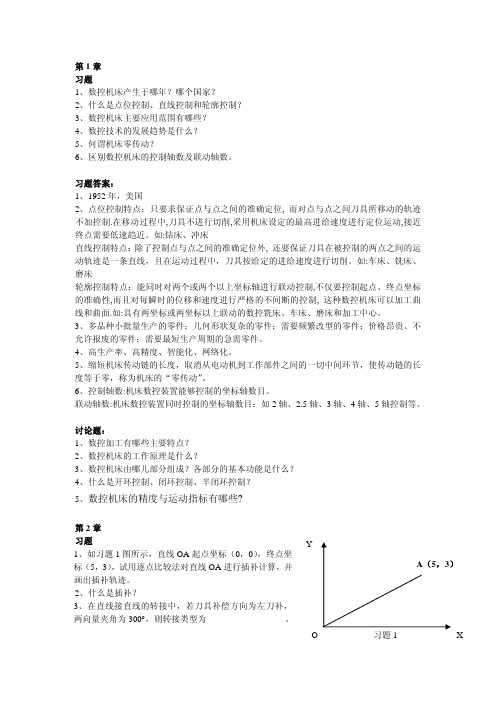
讨论题 1
F
y A(5,3)
x
o
讨论题 3
4、什么是 B 刀具半径补偿?C 刀具半径补偿? 5、何谓数值积分法,它进行直线插补和圆弧插补时有何不同?
第3章 习题: 1、数控机床对伺服系统有哪些基本要求? 2、判断题:
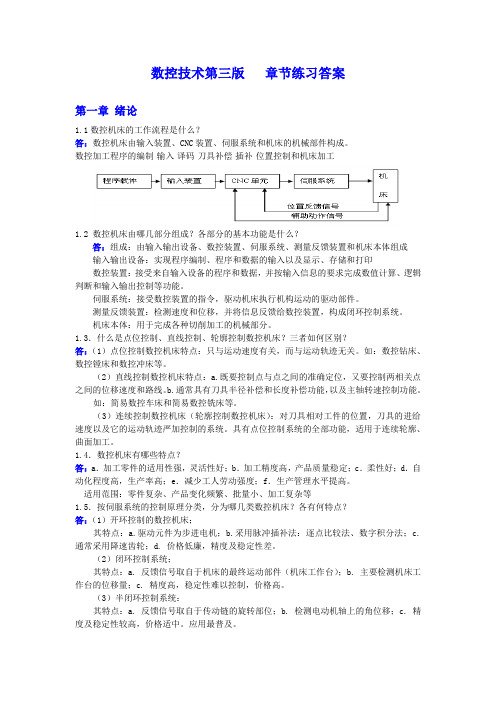
1)给步进电机输入一个脉冲信号,其转子转过的角度称为步距角。( ) 2)伺服系统可分为三种类型,其中的全闭环系统因设计和调整较简单,故被广泛应用。 () 3、三相步进电动机常用的工作方式:______________________、______________________ 和_____________________________。 4、结合下图说明步进电动机工作原理。
较大。 (5)惯量匹配。移动部件加减速时都有较大惯量,要求系统的快速响应性能要好,因而
电动机的惯量与移动部件的惯量要匹配。 (6)较强的过载能力。要求电动机加减速时有很快的响应速度,使电动机可能在过载条
件下工作,这就要求电动机有较强的抗过载能力。 2、1)正确 2)错误 3、单三拍(工作方式) 双三拍(工作方式) 六拍(工作方式) 4、如图所示步进电机有 A、B、C 三相,每相有两个磁极,转子有四个磁极。当 A 相绕组 通以直流电时,定子 A 相磁极产生磁场,并对转子产生磁拉力,使转子的 1、3 极与定子的 A 相磁极对齐。后再将 B 相绕组通以直流电时,B 相磁极产生磁通,这时转子 2、4 极与定 子 B 相磁极对齐。如果按 A→B→C→A 的通电顺序,转子则沿逆时针方向一步步转动起来, 每步转过 30°,这个角度叫做步距角。
《数控技术第3版》_(习题解答)机工版
数控技术第三版章节练习答案第一章绪论1.1数控机床的工作流程是什么?答:数控机床由输入装置、CNC装置、伺服系统和机床的机械部件构成。
数控加工程序的编制-输入-译码-刀具补偿-插补-位置控制和机床加工1.2 数控机床由哪几部分组成?各部分的基本功能是什么?答:组成:由输入输出设备、数控装置、伺服系统、测量反馈装置和机床本体组成输入输出设备:实现程序编制、程序和数据的输入以及显示、存储和打印数控装置:接受来自输入设备的程序和数据,并按输入信息的要求完成数值计算、逻辑判断和输入输出控制等功能。
伺服系统:接受数控装置的指令,驱动机床执行机构运动的驱动部件。
测量反馈装置:检测速度和位移,并将信息反馈给数控装置,构成闭环控制系统。
机床本体:用于完成各种切削加工的机械部分。
1.3.什么是点位控制、直线控制、轮廓控制数控机床?三者如何区别?答:(1)点位控制数控机床特点:只与运动速度有关,而与运动轨迹无关。
如:数控钻床、数控镗床和数控冲床等。
(2)直线控制数控机床特点:a.既要控制点与点之间的准确定位,又要控制两相关点之间的位移速度和路线。
b.通常具有刀具半径补偿和长度补偿功能,以及主轴转速控制功能。
如:简易数控车床和简易数控铣床等。
(3)连续控制数控机床(轮廓控制数控机床):对刀具相对工件的位置,刀具的进给速度以及它的运动轨迹严加控制的系统。
具有点位控制系统的全部功能,适用于连续轮廓、曲面加工。
1.4.数控机床有哪些特点?答:a.加工零件的适用性强,灵活性好;b.加工精度高,产品质量稳定;c.柔性好;d.自动化程度高,生产率高;e.减少工人劳动强度;f.生产管理水平提高。
适用范围:零件复杂、产品变化频繁、批量小、加工复杂等1.5.按伺服系统的控制原理分类,分为哪几类数控机床?各有何特点?答:(1)开环控制的数控机床;其特点:a.驱动元件为步进电机;b.采用脉冲插补法:逐点比较法、数字积分法;c.通常采用降速齿轮;d. 价格低廉,精度及稳定性差。
1.-第一章课后习题及标准答案
第一章1.(Q1) What is the difference between a host and an end system? List the types of endsystems. Is a Web server an end system?Answer: There is no difference. Throughout this text, the words “host” and “end system” are used interchangeably. End systems include PCs, workstations, Web servers, mail servers, Internet-connected PDAs, WebTVs, etc.2.(Q2) The word protocol is often used to describe diplomatic relations. Give an example of adiplomatic protocol.Answer: Suppose Alice, an ambassador of country A wants to invite Bob, an ambassador of country B, over for dinner. Alice doesn’t simply just call Bob on the phone and say, come to our dinner table now”. Instead, she calls Bob and suggests a date and time. Bob may respond by saying he’s not available that particular date, but he is available another date. Alice and Bob continue to send “messages” back and forth until they agree on a date and time. Bob then shows up at the embassy on the agreed date, hopefully not more than 15 minutes before or after the agreed time. Diplomatic protocols also allow for either Alice or Bob to politely cancel the engagement if they have reasonable excuses.3.(Q3) What is a client program? What is a server program? Does a server program requestand receive services from a client program?Answer: A networking program usually has two programs, each running on a different host, communicating with each other. The program that initiates the communication is the client.Typically, the client program requests and receives services from the server program.4.(Q4) List six access technologies. Classify each one as residential access, company access, ormobile access.Answer:1. Dial-up modem over telephone line: residential; 2. DSL over telephone line: residential or small office; 3. Cable to HFC: residential; 4. 100 Mbps switched Etherent: company; 5. Wireless LAN: mobile; 6. Cellular mobile access (for example, 3G/4G): mobile5.(Q5) List the available residential access technologies in your city. For each type of access,provide the advertised downstream rate, upstream rate, and monthly price.Answer: Current possibilities include: dial-up (up to 56kbps); DSL (up to 1 Mbps upstream, up to 8 Mbps downstream); cable modem (up to 30Mbps downstream, 2 Mbps upstream.6.(Q7) What are some of the physical media that Ethernet can run over?Answer: Ethernet most commonly runs over twisted-pair copper wire and “thin” coaxial cable. It also can run over fibers optic links and thick coaxial cable.7.(Q8) Dial-up modems, HFC, and DSL are all used for residential access. For each of theseaccess technologies, provide a range of transmission rates and comment on whether the transmission rate is shared or dedicated.Answer:Dial up modems: up to 56 Kbps, bandwidth is dedicated; ISDN: up to 128 kbps, bandwidth is dedicated; ADSL: downstream channel is .5-8 Mbps, upstream channel is up to1 Mbps, bandwidth is dedicated; HFC, downstream channel is 10-30 Mbps and upstreamchannel is usually less than a few Mbps, bandwidth is shared.8.(Q13) Why is it said that packet switching employs statistical multiplexing? Contraststatistical multiplexing with the multiplexing that takes place in TDM.Answer: In a packet switched network, the packets from different sources flowing on a link do not follow any fixed, pre-defined pattern. In TDM circuit switching, each host gets the same slot in a revolving TDM frame.9.(Q14) Suppose users share a 2Mbps link. Also suppose each user requires 1Mbps whentransmitting, but each user transmits only 20 percent of the time. (See the discussion of statistical multiplexing in Section 1.3.)a.When circuit switching is used, how many users can be supported?b.For the remainder of this problem, suppose packet switching is used. Why will there beessentially no queuing delay before the link if two or fewer users transmit at the same time? Why will there be a queuing delay if three users transmit at the same time?c.Find the probability that a given user is transmitting.d.Suppose now there are three users. Find the probability that at any given time, allthree users are transmitting simultaneously. Find the fraction of time during which the queue grows.Answer:a. 2 users can be supported because each user requires half of the link bandwidth.b.Since each user requires 1Mbps when transmitting, if two or fewer users transmitsimultaneously, a maximum of 2Mbps will be required. Since the available bandwidth of the shared link is 2Mbps, there will be no queuing delay before the link. Whereas, if three users transmit simultaneously, the bandwidth required will be 3Mbps which is more than the available bandwidth of the shared link. In this case, there will be queuing delay before the link.c.Probability that a given user is transmitting = 0.2d.Probability that all three users are transmitting simultaneously=(33)p3(1−p)0=0.23=0.008. Since the queue grows when all the users are transmitting, the fraction oftime during which the queue grows (which is equal to the probability that all three users are transmitting simultaneously) is 0.008.10.(Q16) Consider sending a packet from a source host to a destination host over a fixed route.List the delay components in the end-to-end delay. Which of these delays are constant and which are variable?Answer:The delay components are processing delays, transmission delays, propagation delays, and queuing delays. All of these delays are fixed, except for the queuing delays, which are variable.11.(Q19) Suppose Host A wants to send a large file to Host B. The path from Host A to Host Bhas three links, of rates R1 = 250 kbps, R2 = 500 kbps, and R3 = 1 Mbps.a.Assuming no other traffic in the network, what is the throughput for the file transfer.b.Suppose the file is 2 million bytes. Roughly, how long will it take to transfer the file toHost B?c.Repeat (a) and (b), but now with R2 reduced to 200 kbps.Answer:a.250 kbpsb.64 secondsc.200 kbps; 80 seconds12.(P2) Consider the circuit-switched network in Figure 1.8. Recall that there are n circuits oneach link.a.What is the maximum number of simultaneous connections that can be in progress atany one time in this network?b.Suppose that all connections are between the switch in the upper-left-hand cornerand the switch in the lower-right-hand corner. What is the maximum number ofsimultaneous connections that can be in progress?Answer:a.We can n connections between each of the four pairs of adjacent switches. This gives amaximum of 4n connections.b.We can n connections passing through the switch in the upper-right-hand corner andanother n connections passing through the switch in the lower-left-hand corner, giving a total of 2n connections.13.(P4) Review the car-caravan analogy in Section 1.4. Assume a propagation speed of 50km/hour.a.Suppose the caravan travels 150 km, beginning in front of one tollbooth, passingthrough a second tollbooth, and finishing just before a third tollbooth. What is theend-to-end delay?b.Repeat (a), now assuming that there are five cars in the caravan instead of ten.Answer: Tollbooths are 150 km apart, and the cars propagate at 50 km/hr, A tollbooth services a car at a rate of one car every 12 seconds.a.There are ten cars. It takes 120 seconds, or two minutes, for the first tollbooth to servicethe 10 cars. Each of these cars has a propagation delay of 180 minutes before arriving at the second tollbooth. Thus, all the cars are lined up before the second tollbooth after 182 minutes. The whole process repeats itself for traveling between the second and third tollbooths. Thus the total delay is 364 minutes.b.Delay between tollbooths is 5*12 seconds plus 180 minutes, i.e., 181minutes. The totaldelay is twice this amount, i.e., 362 minutes.14.(P5) This elementary problem begins to explore propagation delay and transmission delay,two central concepts in data networking. Consider two hosts, A and B, connected by a single link of rate R bps. Suppose that the two hosts are separated by m meters, and suppose the propagation speed along the link is s meters/sec. Host A is to send a packet of size L bits to Host B.a.Express the propagation delay, d prop , in terms of m and s.b.Determine the transmission time of the packet, d trans , in terms of L and R.c.Ignoring processing and queuing delays, obtain an expression for the end-to-enddelay.d.Suppose Host A begins to transmit the packet at time t = 0. At time t = d trans , whereis the last bit of the packet?e.Suppose d prop is greater than d trans . At time t = d trans , where is the first bit of thepacket?f.Suppose d prop is less than d trans . At time t = d trans , where is the first bit of thepacket?g.Suppose s = 2.5*108, L = 100bits, and R = 28kbps. Find the distance m so that d propequals d trans .Answer:a. d prop = m/s seconds.b. d trans = L/R seconds.c. d end-to-end = (m/s + L/R) seconds.d.The bit is just leaving Host A.e.The first bit is in the link and has not reached Host B.f.The first bit has reached Host B.g.Wantm=LRS=10028∗103(2.5∗108)=893 km.15.(P6) In this problem we consider sending real-time voice from Host A to Host B over apacket-switched network (VoIP). Host A converts analog voice to a digital 64 kbps bit stream on the fly. Host A then groups the bits into 56-Byte packets. There is one linkbetween Host A and B; its transmission rate is 500 kbps and its propagation delay is 2 msec.As soon as Host A gathers a packet, it sends it to Host B. As soon as Host B receives an entire packet, it converts the packet’s bits to an analog signal. How much time elapses from the time a bit is created (from the original analog signal at Host A) until the bit is decoded (as part of the analog signal at Host B)?Answer: Consider the first bit in a packet. Before this bit can be transmitted, all of the bits in the packet must be generated. This requires56∗8sec=7 msec64∗103The time required to transmit the packet is56∗8sec=896 μsec500∗103Propagation delay = 2 msec.The delay until decoding is7msec + 896μsec + 2msec = 9.896 msecA similar analysis shows that all bits experience a delay of 9.896 msec.16.(P9) Consider a packet of length L which begins at end system A, travels over one link to apacket switch, and travels from the packet switch over a second link to a destination end system. Let d i, s i, and R i denote the length, propagation speed, and the transmission rate of link i, for i= 1, 2. The packet switch delays each packet by d proc. Assuming no queuing delays, in terms of d i, s i, R i, (i= 1, 2), and L, what is the total end-to-end delay for the packet? Suppose now the packet Length is 1,000 bytes, the propagation speed on both links is 2.5 * 108m/s, the transmission rates of both links is 1 Mbps, the packet switch processing delay is 2 msec, the length of the first link is 6,000 km, and the length of the last link is 3,000 km. For these values, what is the end-to-end delay?Answer: The first end system requires L/R1to transmit the packet onto the first link; the packet propagates over the first link in d1/s1; the packet switch adds a processing delay ofd proc; after receiving the entire packet, the packet switch requires L/R2to transmit the packetonto the second link; the packet propagates over the second link in d2/s2. Adding these five delays givesd end-end = L/R1 + L/R2 + d1/s1 + d2/s2 + d procTo answer the second question, we simply plug the values into the equation to get 8 + 8 +24 + 12 + 2 = 54 msec.17.(P10) In the above problem, suppose R1 = R2 = R and d proc= 0. Further suppose the packetswitch does not store-and-forward packets but instead immediately transmits each bit it receivers before waiting for the packet to arrive. What is the end-to-end delay?Answer: Because bits are immediately transmitted, the packet switch does not introduce any delay; in particular, it does not introduce a transmission delay. Thus,d end-end = L/R + d1/s1 + d2/s2For the values in Problem 9, we get 8 + 24 + 12 = 44 msec.18.(P11) Suppose N packets arrive simultaneously to a link at which no packets are currentlybeing transmitted or queued. Each packet is of length L and the link has transmission rate R.What is the average queuing delay for the N packets?Answer:The queuing delay is 0 for the first transmitted packet, L/R for the second transmitted packet, and generally, (n-1)L/R for the nth transmitted packet. Thus, the average delay for the N packets is(L/R + 2L/R + ....... + (N-1)L/R)/N = L/RN(1 + 2 + ..... + (N-1)) = LN(N-1)/(2RN) = (N-1)L/(2R)Note that here we used the well-known fact that1 +2 + ....... + N = N(N+1)/219.(P14) Consider the queuing delay in a router buffer. Let I denote traffic intensity; that is, I =La/R. Suppose that the queuing delay takes the form IL/R (1-I) for I<1.a.Provide a formula for the total delay, that is, the queuing delay plus the transmissiondelay.b.Plot the total delay as a function of L/R.Answer:a.The transmission delay is L / R . The total delay isILR(1−I)+LR=L/R1−Ib.Let x = L / R.Total delay=x 1−αx20.(P16) Perform a Traceroute between source and destination on the same continent at threedifferent hours of the day.a.Find the average and standard deviation of the round-trip delays at each of the threehours.b.Find the number of routers in the path at each of the three hours. Did the pathschange during any of the hours?c.Try to identify the number of ISP networks that the Traceroute packets pass throughfrom source to destination. Routers with similar names and/or similar IP addresses should be considered as part of the same ISP. In your experiments, do the largest delays occur at the peering interfaces between adjacent ISPs?d.Repeat the above for a source and destination on different continents. Compare theintra-continent and inter-continent results.Answer: Experiments.21.(P18) Suppose two hosts, A and B, are separated by 10,000 kilometers and are connectedby a direct link of R = 2 Mbps. Suppose the propagation speed over the link is 2.5•108 meters/sec.a.Calculate the bandwidth-delay product, R •d prop.b.Consider sending a file of 400,000 bits from Host A to Host B. Suppose the file is sentcontinuously as one large message. What is the maximum number of bits that will be in the link at any given time?c.Provide an interpretation of the bandwidth-delay product.d.What is the width (in meters) of a bit in the link? Is it longer than a football field?e.Derive a general expression for the width of a bit in terms of the propagation speed s,the transmission rate R, and the length of the link m.Answer:a.d prop = 107 / 2.5•108 = 0.04 sec; so R •d prop = 80,000bitsb.80,000bitsc.The bandwidth-delay product of a link is the maximum number of bits that can be in thelink.d. 1 bit is 125 meters long, which is longer than a football fielde.m / (R •d prop ) = m / (R * m / s) = s/R22.(P20) Consider problem P18 but now with a link of R = 1 Gbps.a.Calculate the bandwidth-delay product, R·d prop .b.Consider sending a file of 400,000 bits from Host A to Host B. Suppose the file is sentcontinuously as one big message. What is the maximum number of bits that will be inthe link at any given time?c.What is the width (in meters) of a bit in the link?Answer:a.40,000,000 bits.b.400,000 bits.c.0.25 meters.23.(P21) Refer again to problem P18.a.How long does it take to send the file, assuming it is sent continuously?b.Suppose now the file is broken up into 10 packet is acknowledged by the receiver andthe transmission time of an acknowledgment packet is negligible. Finally, assumethat the sender cannot send a packet until the preceding one is acknowledged. Howlong does it take to send the file?pare the results from (a) and (b).Answer:a. d trans + d prop = 200 msec + 40 msec = 240 msecb.10 * (t trans + 2 t prop ) = 10 * (20 msec + 80 msec) = 1.0 sec。
习题册参考答案-《数控加工基础(第三版)习题册》-A02-9077
五、简答题
答案 (略)。
§2—3 数控加工代码及程序格式
一、填空题
1. 符 号 2.程序段 程序段 3. 地 址 符 4.N 5.G 6. 地 址 符 7.F 8.S 9.T 10.刀具 补偿 11. 状 态 12. 程 序 字 13. 程 序 名 14.M02 M30 15. 主 体 16.M02或 M30 M99 17.调用子程序 O200三次 18.调用子程序 O0200三次
四、简答题 答案 (略)。
§4—3 孔加工固定循环功能
一、填空题 1. 初 始 2.孔底位置 参考平面的高度 3.G98 G99 4.G82 G81 5.正 反 正 二、判断题
1.× 2. × 3. √ 4. √ 5. × 6. × 7. √ 8.√ 9.√ 10.×
· 144 ·
三、选择题
1.C 2.C 3.B 4.A 5.C 6.C 7.D 8.C 9.A 10.A 11.A 12.C
二、判断题
1.√ 2. √ 3. √ 4. × 5. × 6. × 7. √ · 137 ·
8.× 9.× 10. × 11. √ 12. √ 13. × 14. √ 15.√ 16.× 17.× 18.√ 19.× 20.√ 21.× 22.√ 23.√ 24.√
三、选择题 1.B 2.C 3.A 4.B 5.B 6.B 7.C 8.A 9.C 10.B 11.B 12.C 13.C 14.D 15.A 16.A 17.B 18.D 19.A 20.A 21.A 22.D 23.C 24.D 25.D 26.A 27.B 28.D 29.C 30.A 31.B 32.D 四、名词解释 答案 (略)。 五、简答题 答案 (略)。
· 139 ·
数控技术与数控机床学习通课后章节答案期末考试题库2023年
数控技术与数控机床学习通课后章节答案期末考试题库2023年1.数控机床总的发展趋势是()参考答案:工序集中###高速、高效、高精度###提高可靠性2.半闭环进给伺服系统的数控机床,其定位精度主要取决于()参考答案:检测装置的精度###机床传动机构的精度3.目前广泛采用的程序段格式是地址符可变长度程序段格式。
参考答案:对4.零件程序是按程序段号的顺序执行的,而与程序段的输入顺序无关参考答案:错5.规定空间直角坐标系X、Y、Z三者的关系及其方向用()判定参考答案:右手法则6.辅助功能由地址字M和其后两位数字组成,主要用于()参考答案:控制机床各种辅助功能的开关动作7.G41和G42是半径补偿指令。
刀具加工工件时,若沿着刀具前进方向观察,刀具偏移在工件轮廓右边,则选用G41;刀具偏移在工件轮廓的左边,则选G42。
参考答案:错8.辅助功能M03代码表示()参考答案:主轴顺时转动9.在加工过程中工件坐标系是静态的,即工件坐标系一旦建立或选定便一直有效,不得更改。
参考答案:错10.设H01=6mm,G91 G43 G01 Z-15;执行后的实际移动量为()参考答案:9mmC系统是指()参考答案:计算机数控系统12.机床零点与机床参考点是数控机床上同一点的不同说法。
参考答案:错13.零件程序是按()的顺序执行的。
参考答案:程序段的输入先后14.一个完整的数控加工程序由程序编号、程序内容和程序结束三个部分组成。
参考答案:对15.属于点位控制系统的数控机床是()。
参考答案:数控钻床16.圆弧插补程序中,若采用圆弧半径R编程时,从起始点到终点存在两条圆弧线段,当()时,用-R表示圆弧半径。
参考答案:圆弧大于180°17.在数控机床编程中,进给速度指令是以字母开头的。
主轴转速指令是以字母开头的。
刀具号指令是以字母开头的参考答案:F, S, T18.在直线进给时,F指令所指定的速度是()参考答案:各进给轴合成的进给速度19.( )坐标是用来确定工件坐标系的基本坐标系,其原点称为( )。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数控技术与装备课后习题
第三版韩建梅主编
第一章数控技术概述
1.什么是数字控制技术?什么叫数控机床?简述数控机床产生
的背景。
数字控制:(Numerical Control)是一种借助数字、字符或其它符号对某一工作过程(如加工、测量、装配等)进行编程控制的自动化方法。
数字控制技术:(Numerical Control technology)是指用数字量及字符付出指令并实现自动控制的技术,是制造业实现自动化、柔性化和集成化生产的基础技术。
数控机床:(Numerical Control Machine Tools)是采用数字控制技术对机床的加工过程进行自动控制的一类机床。
通过数字(代码)指令来自动完成机床各个部件运动。
背景:20世纪40年代航空技术的不断发展对各种飞行器的制造提出了越来越高的要求,1952年美国空军委托帕森斯公司与麻省理工学院,成功研制世界第一台三坐标立式数控铣床,标志着机械制造数字控制时代的开始。
2.数控机床的加工特点有哪些?试述数控机床的使用范围。
特点:加工精度高质量稳定、生产效率高、适应性强、良好的经济效益、自动化程度高劳动强度小、有利于实行现代化生产管理。
使用范围:多品种,中小批量生产零件、形状结构比较复杂的零件、需要频繁改型的零件、需要最短生产周期的零件。
3.数控机床由哪几部分组成?各部分基本功能是什么?
组成:一般由数控系统、伺服系统、主传动系统、强电控制装置、辅助装置和机床本体组成。
功能:
数控系统:机床实现自动加工的和弦,主要由操作系统、主控制系统、可编程控制器、各类I/O接口等组成。
主要功能有:多坐标控制和多种函数的插补功能、多程序输入功能,以及编辑和修改功能、信息转换功能、补偿功能、多种加工方法选择功能、显示功能、自诊断功能,通信和联网功能。
伺服系统:是数控系统的执行部分,有伺服电动机、驱动装置及位置检测反馈装置组成,并与机床上执行部分和机械传动部分组成数控机床的进给系统。
主要功能是根据数控装置发来的速度和位移指令控制运动部件的进给速度、位移和方向,有闭环、半闭环、开环之分,闭环直接(位置检测装置安装在执行部件上或工件上)测量执行部件的实际进给位移,半闭环间接(位置检测装置安装在伺服电机转轴上),开环没有位置检测装置。
主传动系统:是机床切削加工时传递扭矩的主要部件之一,有齿轮有级调速和电气无级调速两种类型。
主要由主轴驱动控制系统、主轴电动机以及主轴机械传动机构组成。
强电控制装置(强电柜):主要由各种中间继电器、接触器、变压器、电源开关、接线端子和电气保护元件组成,主要作用是接受数控装置输出的主运动变速、刀具选择交换、辅助装置动作等指令信号,经必要的编译、逻辑判断、功率放大后直接驱动相应的电器、液压、气动和机械部件、完成指令所规定的动作。
此外形成开关和监控检测等开关信号也要经过强电控制装置输送到数控装置进行处理。
辅助装置:包括刀具交换装置(ATC)工件交换装置(APC)、工件夹紧放松机构、回转工作台、液压控制系统、润滑装置、冷却液装置、排屑装置、过载与限位保护装置。
机床本体:数控机床机械结构实体,由主传动机构、进给传动机构、工作台、床身以及立柱等部分组成。
4.简述数控机床的工作原理。
数控机床是用数字化的信息来实现自动控制的。
先将与加工零件有关的信息,即工件与刀具相对运动轨迹的尺寸参数、切削用量及各种辅
助操作等加工信息,用规定的文字、数字和符号组成代码,按一定的格式编写成加工程序,然后将加工程序输入数控装置。
经过数控装置的处理、运算,按个坐标轴的移动分量送到各轴的驱动电路,经过转换、放大,用于伺服电动机的驱动,带动各轴运动,并进行反馈控制,使刀具、工件以及其他辅助装置按照程序规定的顺序、轨迹和参数有条不紊地运动,从而加工出所需要的零件。
5.试述数控机床按其功能的分类情况以及各类机床的特点。
按功能分:低中高三挡。
按工艺用途分金属切削类数控机床(数控车床、数控铣床、加工中心);金属成型类数控机床,采用冲、挤、压、拉成型;特种加工类数控机床(数控线切割机、数控电火花加工机、数控激光切割机、数控火焰切割机、数控三坐标测量机)
6.试述闭环控制数控机床的控制原理,它与开环控制数控机床的差异。
闭环控制系统数控机床配有速度反馈和位置反馈,位置检测装置安装在末端的执行部件上,测得实际的位移和位置,速度检测装置安装在伺服电动机主轴(刚性同轴连接)上,测得实际的转速,得到速度反馈信号,将检测的位置信号和速度信号与伺服驱动装置的位置信号和速度信号比较,利用比较的差额进行过程的矫正,实时对位置、位移和转速等进行反馈控制。
与开环控制数控机床相比,精度高、、速度更快、功率更大。
但是机械传动的摩擦、刚度和间隙均呈非线性特性,整个机械传动响应时间非常慢,致使闭环控制系统的稳定性矫正带来困难,系统的设计和调整也都相当复杂。
7.什么叫点位控制、点位直线控制、轮廓控制数控机床?试述各自的特点和应用。
1.点位控制数控机床
点位控制只是要求控制机床的移动部件从一点移动到另一点的准确定位,而对于点与点之间的运动轨迹的要求并不严格,在移动过程中不进行加工,各坐标轴之间的运动是不相关的。
这类机床主要有数控钻床、数控镗床和数控冲床等。
直线控制数控机床
直线控制数控机床也叫平行控制数控机床,它的特点是除了控制点与点之间的准确定位外,还要控制这两点之间的移动速度和路线,但是它的运动路线只是与机床坐标轴平行或成45°的斜线移动,也就是说同时控制的坐标轴只有一个,在移动的过程中刀具能以指定的进给速度进行切削,一般只能加工矩形、台阶形零件。
这类机床主要有比较简单的数控车床、数控铣床和数控磨床等。
轮廓控制的数控机床
轮廓控制数控机床也叫连续控制数控机床,它的特点是能够对两个或两个以上的运动坐标的位移和速度同时进行连续地相关控制,使合成的平面或空间运动轨迹能满足轮廓曲线和曲面加工的要求。
这类机床主要有数控车床、数控铣床、加工中心等,其相应的数控装置称为轮廓控制系统。
根据它所控制的联动坐标轴数不同,又可以分为下面几种形式。
二轴联动;二轴半联动;三轴联动;四轴联动;五轴联动。
8.加工中心同一般数控系统的区别是什么?
在数控铣床的基础上配备刀库和自动换刀系统就构成加工中心,加工中心与普通数控机床的主要区别就是:它能在一台机床上完成多道工序内的加工。
9.什么叫柔性制造系统?它有何特征?
所谓柔性即表示有较大的适应性,它是相对刚性而言的。
柔性制造系统FMS是利用计算机控制系统和物料输送系统,把若干台设备联系起来,形成没有固定加工顺序和节拍的自动化制造系统。
它在加工完一种工件后,在不停机调整的情况下,自动地向另一种工件转换。
主要特征有,高柔性,即在不停机调整的情况下,实现多种不同工艺要求的零件加工;高效率;高度自动化即自动更换工件、刀具、夹具实现自动装夹和输送,自动检测加工过程,有很强的系统软件功能。
10.柔性制造系统由哪几部分组成?。