第2章信号与系统分析基础1
电路各章习题及答案
各章习题及答案第一章绪论1 .举例说明什么是测控?答:(1) 测控例子:为了确定一端固定的悬臂梁的固有频率,我们可以采用锤击法对梁进行激振,再利用压电传感器、电荷放大器、波形记录器记录信号波形,由衰减的振荡波形便可以计算出悬臂梁的固有频率。
(2)结论:由本例可知:测控是指确定被测对象悬臂梁的属性—固有频率的全部操作,是通过一定的技术手段—激振、拾振、记录、数据处理等,获取悬臂梁固有频率的信息的过程。
2. 测控技术的任务是什么?答:测控技术的任务主要有:通过模型试验或现场实测,提高产品质量;通过测控,进行设备强度校验,提高产量和质量;监测环境振动和噪声,找振源,以便采取减振、防噪措施;通过测控,发现新的定律、公式等;通过测控和数据采集,实现对设备的状态监测、质量控制和故障诊断。
3. 以方框图的形式说明测控系统的组成,简述主要部分的作用。
测控系统方框图如下:(2)各部分的作用如下:●传感器是将被测信息转换成某种电信号的器件;●信号的调理是把来自传感器的信号转换成适合传输和处理的形式;●信号处理环节可对来自信号调理环节的信号,进行各种运算、滤波和分析;●信号显示、记录环节将来自信号处理环节的信号显示或存贮。
●模数(A/D)转换和数模(D/A)转换是进行模拟信号与数字信号相互转换,以便用计算机处理。
4.测控技术的发展动向是什么?传感器向新型、微型、智能型方向发展;测控仪器向高精度、多功能、小型化、在线监测、性能标准化和低价格发展;参数测量与数据处理向计算机为核心发展;5. A precise optional signal source can control the output power level to within 1%. A laser is controlled by an input current to yield the power output. A microprocessor controls the input current tothe laser. The microprocessor compares the desired power level with a measured signal proportional to the laser power output obtained from a sensor. Complete the block diagram representing thisclosed-loop control system shown in Fig E1.1, identifying the output, input, and measured variables and the control device.答:6. many luxury automobiles have thermostatically controlled air-conditioning system(恒温空调系统)for the comfort of the passengers. Sketch a block diagram of an air-condition temperature on a dashboard panel(仪表盘). Identify the function of each element of the thermostatically controlled cooling system.答:7. In the past, control systems used a human operator as part of a closed-loop control system. Sketch the block diagram of the valve control system shown in Fig. P1.2.答:8. The student-teacher learning process is inherently a feedback process intended to reduce the system error back model of the learning process and identify each block of the system.答:9. Automatic control of water level using a float level was used in the Middle East for a water clock. The water clock was used from sometime before Christ until the seventeenth century. Discuss the operation of the water clock, and establish how the float provides a feedback control that maintains the accuracy of the clock. Sketch a block diagram of the feedback system.答:第二章信号与系统分析基础1求周期方波的傅立叶级数(复指数函数形式),画出|c n|-ω和ϕ-ω图。
信号系统控制理论第2章 对系统的基本认识

第 2 章 对系统的基本认识
• 图2.2-2 a. 所示系统只有单个输入和单个输出信号,称为 单输入单输出系统(SISO)。 • 图2.2-2 b. 所示系统含有多个输入和多个输出信号,则称 为多输入多输出系统(MIMO)
f 1 ( t) f ( t) 单入 单出 系 统
a.
y 1 ( t)
M
多入 多出 系 统
f (⋅) → y f (⋅)
f (t − t d ) → y f (t − t d )
f (k − k d ) → y f (k − k d )
系统的这种性质称为时不变特性。
第 2 章 对系统的基本认识 3 ) 因果性 一个系统,如果激励在 t < t0 (或 k<k0 ) 时为零,相应的零状 态响应在 t<t0 (或 k<k0 ) 时也恒为零,就称该系统具有因果性 因果性, 因果性 并称这样的系统为因果系统 因果系统;否则,为非因果系统 非因果系统。 因果系统 非因果系统 在因果系统中,原因决定结果,结果不会出现在原因作用 之前。 因此,系统在任一时刻的响应只与该时刻以及该时刻以 前的激励有关,而与该时刻以后的激励无关。 所谓激励可以是 当前输入,也可以是历史输入或等效的初始状态。由于因果系 统没有预测未来输入的能力,因而也常称为不可预测系统 不可预测系统。 不可预测系统
扰动量 给定量 控制器 被控对象 被控量
图2.2-3 一种开环控制系统的方框图
第 2 章 对系统的基本认识
• 如果系统不仅具有输入对输出的正向控制作用,而且还有输出对输 入的反向影响过程,则称这种系统为闭环控制系统。图2.2-4就是一 种闭环控制系统的方框图。
扰动量 给 定 量 比较计算 放大 执行 被控对象 被 控 量
信号与系统第二章

解得
B1
21 50
, B2
3 50
u2(t)的特解为: u2 p t 21 cos 2t 3 sin 2t
50 50
全响应u2(t)为
u2 t u 2 h t u 2 p t A1e t A2 e 6t 21 3 cos 2t sin 2t 50 50
微分方程的建立
对于电系统,当结构参数已知时,可通过基尔霍夫电流 定律KCL和基尔霍夫电压定律KVL及元部件的伏安特性VAR 来建立方程。
VAR
电阻
iR (t )
R
uR (t ) RiR (t )
uR (t )
iR (t )
uR (t ) R
电感
iL (t )
L
uL (t )
diL (t ) uL (t ) L dt
对于连续时间系统,最常用的数学模型为高阶微分方程。
连续时间系统
微分方程
如果系统为单输入、单输出LTI系统,则可用下面的高阶常 n m 微分方程来描述 i j
C r t E e t
i 0 i j 0 i
式中,e(t)为输入激励量,又称强迫量;r(t)为输出响应 变量,是待求量;n是系统的阶数。这种描述系统的方法只 关心系统的输入信号和输出信号,而对系统内部的其他信号 的变化不关心,故称为输入-输出法。
特解的形式 系统微分方程的特解rp(t)就是系统的强迫响应,它只与激励 函数的形式有关。 几种典型激励函数e(t)及其所对应的特解rp(t)如表所示。选定 特解后,将其代入原微分方程,求出特解函数式中的待定系 数,就可得出特解rp(t)。 P46 表2-2
信号与系统基础及应用第1章 信号与系统基础知识

1 xe (t) 2 [x(t) x(t)]
1 xo (t) 2 [x(t) x(t)]
2.信号分解为基本信号的有限项之和 xa (t) t[u(t) u(t 1)] [u(t 1) u(t 2)]
xa (t) tu(t) (t 1)u(t 1) u(t 2)
t
2
Gτ t
1
O
2
t
2
⦿其他函数只要乘以门函数,就只剩下门内的部分。
3.符号函数(Signum)
1,t 0 sgn(t) 1,t 0
sgnt
O
t
sgn(t) u(t) u(t) 2u(t) 1
u(t) 1 [sgn(t) 1] 2
1.3.1 信号的相加和相乘
1
0 1
0
1
信号的和
0
1
信号的积
0
1.3.2 信号的微分与积分
积分 原信号 微分
1.3.3 信号的平移、翻转与展缩
时移
右移
左移
展缩
x(t) t[u(t) u(t 1)] [u(t 1) u(t 2)] x(2t) 2t[u(t) u(t 0.5)] [u(t 0.5) u(t 1)] x( t ) t [u(t) u(t 2)] [u(t 2) u(t 4)]
《信号与系统基础及应用》
• 第1章 信号与系统基础知识 • 第2章 连续时间信号分析 • 第3章 连续时间系统分析 • 第4章 离散时间信号分析 • 第5章 离散时间系统分析 • 第6章 离散傅里叶变换及应用 • 第7章 数字滤波器设计
第1章 信号与系统基础知识
工程测试技术 第2章 信号分析基础-3

第二章、信号分析基础
Page 2 华中科技大学机械学院
2.5 信号的频域分析
信号频域分析是采用傅立叶变换将时域信号x(t)变换为 频域信号X(f),从而帮助人们从另一个角度来了解信号的特 征。
傅里叶 变换
8563A
SPECTRUM ANALYZER 9 kHz - 26.5 GHz
第二章、信号分析基础
2.5 信号的频域分析
频域分析
Page 25 华中科技大学机械学院
吉布斯现象(Gibbs)
• 吉布斯现象是由于展开式在间断点邻域不能均匀收敛 引起的。
• 例:方波信号
x(t)
T
T
t
2.5 信号的频域分析
频域分析
Page 26 华中科技大学机械学院
N=1
2.5 信号的频域分析
Page 27 华中科技大学机械学院
用线性叠加定理简化
X1(f)
+Page 38 华中科技大学机械学院
5、频谱分析的应用
频谱分析主要用于识别信号中的周期分量,是信号分析 中最常用的一种手段。
在齿轮箱故障诊断中,可
以通过齿轮箱振动信号频谱分 析,确定最大频率分量,然后 根据机床转速和传动链,找出 故障齿轮。
2 T
T /2
T /2 x(t) sin n0tdt;
ω0―基波圆频率; f0 ―基频:f0= ω0/2π
An an2 bn2 ;
n
arctan bn an
;
2.5 信号的频域分析
傅里叶级数的复数表达形式:
x(t) Cne jn0t , (n 0,1,2,...) n
Page 9 华中科技大学机械学院
2.5 信号的频域分析
信号与系统基础知识-精选.pdf
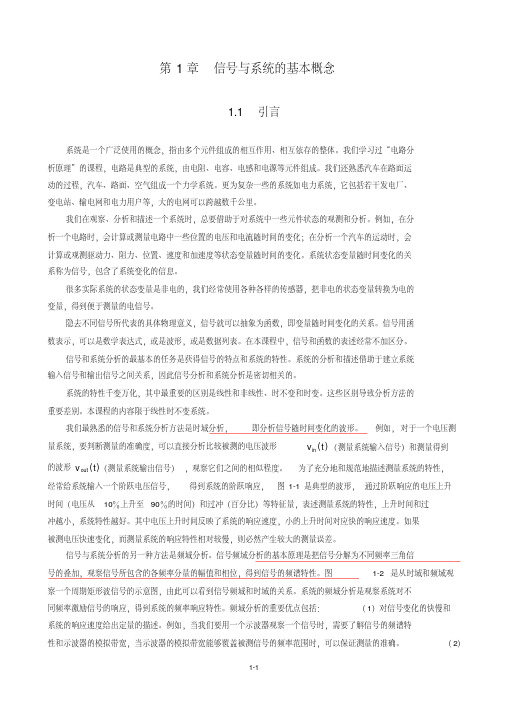
时间(电压从 10%上升至 90%的时间)和过冲(百分比)等特征量,表述测量系统的特性,上升时间和过
冲越小,系统特性越好。其中电压上升时间反映了系统的响应速度,小的上升时间对应快的响应速度。如果
被测电压快速变化,而测量系统的响应特性相对较慢,则必然产生较大的测量误差。
信号与系统分析的另一种方法是频域分析。信号频域分析的基本原理是把信号分解为不同频率三角信
f (t) 0
F (k 1) k1
t
0
图 1-2 周期矩形波信号的时域和频域
信号和系统分析还有复频域分析的方法,对于连续信号和系统,基于拉普拉斯变换,称为
s 域分析;对
于离散信号和系统,基于 z变换,称为 z 域分析。基于复频域分析,能够得到信号和系统响应的特征参数,
即频率和衰减,分析系统的频率响应特性和系统稳定性等;复频域分析也能简化系统分析,将在时域分析
信号和系统分析的最基本的任务是获得信号的特点和系统的特性。系统的分析和描述借助于建立系统
输入信号和输出信号之间关系,因此信号分析和系统分析是密切相关的。
系统的特性千变万化,其中最重要的区别是线性和非线性、时不变和时变。这些区别导致分析方法的
重要差别。本课程的内容限于线性时不变系统。
我们最熟悉的信号和系统分析方法是时域分析, 即分析信号随时间变化的波形。 例如, 对于一个电压测
f a (t ) 是一个电压信号或电
流信号,它作用在一个 1Ω 电阻上时所消耗的能量为信号能量。
一个离散信号 f d ( n) 的能量定义为
Ed
n
2
fd (n)
当 f d ( n) 为复信号时,
2
fd (n)
f d (n) fd (n) 。
信号与系统第2章

第二章 傅立叶变换
(5) 微分特性 如果 那么
(6)积分特性 如果 那么
如果F(0)=0
第二章 傅立叶变换
(7)卷积定理 1.时域卷积定理 如果 那么 (8)频域卷积定理 如果
那么
第二章 傅立叶变换
11周期信号的傅里叶变换
周期信号的频谱------用傅里叶级数表示。 非周期信号的频谱——用傅里叶变换表示。 周期信号的频谱可以用傅里叶变换表示吗? (1)正弦、余弦信号的傅里叶变换 直流信号的博立叶变换为
n1 ) 2 n1 2
2 E sin( An T
2 E sin( An T
2
)
2
这里
2 1 T
Hale Waihona Puke n1第二章 2 E sin( An T
傅立叶变换
2
)
2
若: 2 An 0 (1) 2 (2) 2
该式表明:周期信号f(t)的傅里叶变换F(ω )是由一些冲击函数组成的, 并位于基波ω 1的整数倍处,冲击强度为f(t)的指数傅里叶级数的系数Cn 的2π 倍。
第二章 傅立叶变换
例4. 求周期单位冲激序列的傅里叶级数与傅里叶变换。
傅里叶级数为
第二章 傅立叶变换
例5. 求周期矩形脉冲信号的傅里叶级数和傅里叶变换 矩形脉冲信号f(t)的 傅里叶系数为:
第二章 傅立叶变换
例1已知矩形脉冲f1(t)如图(a)所示,其相位谱如图(b)所示, 将f1(t)右移τ /2得到如图(c)所示f2(t),试画出其相位谱。
由题意可知
根据时移特性,可得f2(t)的频谱函数 为
第二章 傅立叶变换
f2(t)幅度谱没有变化,其相位谱比图(b)滞后τ ω /2、如图(d)所示。要
工程测试技术基础 第二部分 信号分析基础

为能量信号,满足条件:
x2 (t)dt
一般持续时间有限的瞬态信号是能量信号。
瞬态信号
2.1 信号的分类与描述
b)功率信号 在所分析的区间(-∞,∞),能量不是有限值.此时,
研究信号的平均功率更为合适。
T
lim
数学期望,称为相关性,表征了x、y之间其的中一关个联可程以度测。量的量
cxy xy x y
E[(xx )( y的 的y )变变] 化化来。表示另一个量
E[(xx )2 ]E[( y y )2 ]1/ 2
y
y
y
y
x
x
xy 1
xy 1
x
0 xy 1
b) sinc 函数
sin c(t) sin t , or, sint , ( t )
t
t
性质:
波形
偶函数;
闸门(或抽样)函数;
滤波函数;
内插函数。
2.1 信号的分类与描述
c) 复指数函数
est et e jt
t
et cost et sint ; s j
瞬态信号
瞬态信号:持续时间有限的信号,如 x(t)= e-Bt . Asin(2*pi*f*t)
2.1 信号的分类与描述
c)非确定性信号:不能用数学式描述,其幅值、相位变化 不可预知,所描述物理现象是一种随机过程。
噪声信号(平稳)
噪声信号(非平稳)
统计特性变异
2.1 信号的分类与描述 2 能量信号与功率信号
(3)卷积特性
f (t) * (t) f ( ) (t )d f (t)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1
0
f (t)
1
t
f(t) K
0
t0
t0+1
t
延迟的斜变信号
τ
t
0
τ
t
截平的斜变信号
三角形脉冲信号
(6)奇异信号——单位阶跃信号u(t)
u(t)=
{
0 (t≤0) 1 (t≥0)
u(t)
1 0 t 1 0 GT(t)
u(t-t0)
延迟的阶跃信号
t0
t
RT(t) 1
矩形脉冲
1
0
T
t
0 T/2
t
(6)奇异信号——单位冲激信号δ函数
(t t0 ) f (t )dt (t t0 ) f (t0 )dt f (t0 )
f (t ) f ( ) (t )d
2.2.3信号的分解
f(t1)[u(t-t1)-u(t-t1-Δt1)]
一个信号可分解为冲激信号的叠加。 f(t)= - f(t1) δ(t-t1)dt1=- f(τ) δ(t-τ)dτ
信源编码与译码:
提高信息传输的有效性 完成模/数转换
信道编码与译码:增强抗干扰能力 加密与解密:保证所传信息的安全 数字调制与解调:形成适合在信道中传输的带通信号 同步:使收发两端的信号在时间上保持步调一致
数字基带传输系统
信 息 源
基带信号 形 成 器
信 道 噪声源
接 收 滤波器
(t )dt 1
δ(t) 1/τ (1)
(t ) (当 0 t 0)
t
t
τ
O
冲激函数的性质
对称性 微分特性
(t ) (t )
t
( )d u (t )
du (t ) (t ) dt
抽样性
(t ) f (t )dt (t ) f (0)dt f (0)
系统
e2(t)
系统
r2(t)
基本特性(二)
时不变特性
e(t) E O T t O t r(t)
系统
e(t-t0) E O t0 t0+T t O
r(t-t0)
t0
t
基本特性(三)
微分特性
de (t)/dt e (t) r (t) 0t e (τ)dτ
系统
dr (t)/dt
系统
系统
0t r (τ)d τ
基本特性(四)
因果性
是指系统在t0时刻的响应只与t=t0和t<t0时刻的输入有关。
e(t) E O T t
r2 (t)=e(t-1) 1(t)=e(t+1)
-1 O O -1+T 1 1+T t
2.3.2冲激响应 h(t)
系统在单位冲激信号δ(t)的激励下产 生的零状态响应。
受 信 者
2.1引言
对通信原理、技术及设备的研究与探讨是基于模 块化的和面向对象的。 每个模块又称为一个系统或一个子系统。通常用 一个带有说明文字的方块图表示。 每个模块实现某种特定的功能,可以用一个或一 组称之为传输函数的数学表达式来描述。 实现某个模块功能的电路及元器件可能非常复杂, 也可能非常简单。 多个简单的模块可以组合成一个复杂模块,一个 复杂模块可以分解为多个简单模块。
【例2-3】已知e(t)和h(t),求e(t)h(t)。
e(t)=1 –1/2≤t≤1
e(t) 1
-1/2 O 1 t
h(t)= t /2 0≤t≤2
h (t)
1 O 2 t
(1)改换图形中的横坐标,由t改为τ, τ变成函数 的自变量;
e()=1 –1/2≤≤1
e(τ) 1
-1/2 O τ
h(t)= t /2
0≤t≤2
h (t)
O
t
O
2
t
2.4.3卷积的性质
(1)交换律 (2)分配律 (3)结合律 (4)卷积的微分 (5)卷积的积分 (6)与冲激函数的卷积 (7)与阶跃函数的卷积
卷积的性质(一)
(1)交换律 f1(t)f2(t)=f2(t)f1(t) (2)分配律 f1(t)[f2(t)+f3(t)]=f1(t)f2(t)+f1(t)f3(t) (3)结合律 [f1(t)f2(t)]f3(t)=f1(t)[f2(t)f3(t)]
-
t
u (t )
2.3.3系统的时域分析
e(t)
h(t)
r(t)
由于任意信号可以用冲激信号的组合表示,即: e(t)= - e(τ) δ(t-τ) dτ 根据LTI系统的微分特性,则系统的响应可表示为: r(t)= - e(τ) h(t-τ) dτ=e(t)*h(t)
2.4卷积
其中:
1 T f
2
欧拉公式
形式一:
e jt cos( t ) j sin(t ) e jt cos( t ) j sin(t )
形式二:
e cos(t ) 2 jwt jt e e sin(t ) 2j e
jt
jt
(3)复指数信号
2.2.1 信号的分类
确定性信号与随机信号 周期信号与非周期信号 f(t)=f(t+nT) n=0, ±1, ±2…(任意整数) T↗∞时,f(t)成为非周期信号。 “伪随机信号” ——T足够大。 连续(时间)信号与离散(时间)信号 模拟信号:时间和幅值都为连续的信号。 抽样信号:幅值连续的离散信号。 数字信号:时间和幅度取值都具有离散性的信号。 一维信号与多维信号
e(t ) h(t )
2.4.2卷积积分运算的步骤
(1)改换图形中的横坐标,由t改为τ, τ变成函数 的自变量; (2)把其中的一个信号反褶; (3)把反褶后的信号做位移,移位量是t,这样t是 一个参变量。在τ坐标系中,t>0图形右移;t<0 图形左移; (4)两信号重叠部分相乘; (5)完成相乘后图形的积分。
τ O t
(d) 3 ≤ t < ∞
【例2-5】已知e(t)和h(t),求e(t)h(t)。
e(t)=1 –3/2≤t≤1
e(t) 1
-3/2
h(t)= t /2 0≤t≤2
h (t)
1 t O 2 t
O
1
【例2-6】已知e(t)和h(t),求e(t)h(t)。
e(t)=u(t)
e(t)
1 1
定义:
性质:
sin t Sa (t ) t
0
Sa (t )dt
2
Sa (t )dt
(5)钟形信号(高斯函数)
定义:
f (t ) Ee
( ) 2
t
(6)奇异信号——单位斜变信号
f(t) f(t)= f(t-t0) 1
{
K 0
0 (t≤0) t (t≥0)
2.3线性时不变系统
最普遍、最基本的系统是集总参数线性时不变系 统(线性时不变,linear time-invariant,缩写 为LTI)。 LTI系统包括连续时间系统和离散时间系统。
RLC电路 计算机
2.3.1线性时不变系统的基本特性
叠加性与均匀性
e1(t)
系统
r1(t) c1e1(t)+c2e2(t) c1r1(t)+c2r2(t)
δ(t)
线性时不变 系统
h(t)
【例2-1】RC并联电路的冲激响应
τ=RC t 1 h(t)=uc(t)= e C t 1 e u (t ) = C
t≥0+
【例2-2】RL串联电路的冲激响应
τ=L/R t 1 h(t)=iL(t)= e L
t≥0+
= 1 e L
τ
t
O
(a) ﹣∞<t ≤﹣1/2
t (b) ﹣1/2 <t ≤1
O
t (c) 1≤t ≤3/2
O
τ O t (d) 3/2≤t ≤3
O
τ t
(e) 3 ≤ t < ∞
(5)完成相乘后图形的积分。
(a)-∞<t≤-1/2, e(t)h(t)=0 (b)-1/2 ≤ t≤1, e(t)h(t)=∫t-1/2 1×(t-τ)/2dτ =t2/4+t/4+1/16 (c)1 ≤t ≤3/2, e(t)h(t)=∫1-1/2 1×(t-τ)/2dτ =3t/4-3/16 (d)3/2 ≤t ≤3, e(t)h(t)=∫1t-2 1×(t-τ)/2dτ =-t2/4+t/2+3/4 (e)3 ≤t<∞, e(t)h(t)=0
t Re[f( t )] K e 包络
t
2
( 0) 0
Constant Amplitude 等幅
Re[f(t )] Envelop t 包络 K e
2
( 0)
Re[f(t )]
包络 K e t
t
2
t
0
0 ( 0)
Growing 增长
Decaying 衰减
(4)Sa(t)信号(抽样信号)
卷积运算的定义 卷积积分运算的步骤
卷积的性质
2.4.1卷积运算的定义
对于任意两个信号f1(t)和f2(t),两者的卷积运算定 义为: