DSP多普勒雷达测速测距
基于DSP的雷达测速计量系统的研究的开题报告

基于DSP的雷达测速计量系统的研究的开题报告一、研究背景雷达测速是一种通过向车辆发射微波信号并接收反射信号来测量车辆速度的技术,已经得到广泛应用。
现有的雷达测速仪器大多采用数字信号处理(DSP)技术,能够实现高精度、高速度的测量。
然而,由于交通流量的增加和道路交通事故的频发,利用雷达测速技术对车辆进行监控已经成为一项重要的任务。
因此,开发基于DSP的雷达测速计量系统,能够满足更加复杂交通环境下对车辆监控的需求是非常必要的。
二、研究目的本研究旨在开发一种基于DSP的雷达测速计量系统,实现对车辆速度的精确测量,并能够在复杂的交通环境下实现对车辆的监控。
三、研究内容本研究将包括以下内容:1. 设计基于DSP的雷达测速计量系统,包括硬件设计和软件设计。
2. 优化系统的信号处理算法,以提高测量精度和稳定性。
3. 实现对车辆速度的实时监控和记录,以便对违法行为进行跟踪和证据采集。
4. 将系统进行性能测试,评估系统在不同环境条件下的稳定性和精度。
四、研究意义本研究的成果可以为道路交通安全监控提供有力支持,有助于减少交通事故的发生率,并维护交通秩序。
旨在通过提高交通监管部门的交通监管效率,提高道路交通的安全性和流畅性,为公众出行提供更安全、更便捷、更高效的保障。
五、研究方法和技术路线本研究的方法和技术路线如下:1. 硬件设计:选用高性能、低功耗的DSP芯片,集成模拟前端电路和数字信号处理器,实现雷达测速计量系统的硬件设计。
2. 软件设计:利用可编程软件实现雷达测速计量系统的控制程序和信号处理算法。
3. 优化算法:针对DSP平台的信号处理特性,优化雷达测速系统的信号处理算法,以提高测量精度和稳定性。
4. 性能测试:在不同环境条件下对系统进行性能测试,以评估系统的稳定性和精度。
六、预期成果预期以下成果:1. 设计出符合要求的基于DSP的雷达测速计量系统,并能够实现较高的测量精度和稳定性。
2. 实现对车辆速度的实时监控和记录,能够对违法行为进行跟踪和证据采集。
基于DSP处理器的多普勒雷达系统设计

De i fPD a a y t m a e n DSP sgn o r d rs se b s d o
JA e -h o BAIYu REN i e W ANG h—o g I W nc a , , L— , y S irn
( c o l olg f l t c& E eto i E gn e n . h n c u ie s yo c n lg , h n c u 3 0 2 hn ) S h o l e e r C e o E ci lcr nc n ie r g C a g h nUn ri f i v t Te h oo y C a g h n1 0 1 ,C ia
导弹 、 人造卫 星 , 种舰艇 、 各 车辆 、 器 、 弹 , 兵 炮 以及 建 筑物 、 山川 、 雨等 , 可能 作 为 雷达 的探 测 目 云 都
标c ¨。
炮 瞄雷 达 在 接 到 火 炮 光 学 测 角 仪 的指 令 之
后, 要求能 够精 确快 速 地 测 量 出运动 目标 相 关数
维普资讯
第2 8卷第 1 期
2 0 年 3月 07
长 春 工 业 大 学 学 报( 自然 科 学 版 )
J u n l f h n c u ies yo e h n l y N t rl ce c dt n o r a o a g h n Un ri f c o oo ( a u a S in eE io ) C v t T g i
1 系 统 的设 计 目标
雷达与火 炮“ 角仪 ”火炮计 算机 组成“ 测 、 雷达 工作 站” 。雷 达接受 光学 测角仪 的指令 , 进行 目标
直视 距离 R 的测 量 和移 动 目标 瞬时 移动 速 度 ,
基于DSP的车载雷达测速系统设计

《自动化技术与应用》2006年第25卷第7期20 | T echniques of Automation & Appications基于DSP的车载雷达测速系统设计唐 伟,孙志芳,陈 全(长江大学计算机科学学院,湖北 荆州 434023)摘 要:针对运行中火车测速,运用多普勒效应,采用DSP设计雷达测速系统,并阐述了其基本设计思想与工作原理。
给出系统硬件、软件设计结构和原理图,改善了原有光电测速精度,提高了系统工作稳定性和可靠性,经实验证明DSP采集板工作稳定,测速效果好。
关键词:DSP; 雷达测速; 多普勒效应中图分类号:TJ310.35 文献标识码:B 文章编号:1003-7241(2006)07-0020-03On Board DSP-Based Radar Speed Measurement SystemTANG Wei, SUN Zhi-fang, CHEN Quan(Dept.of computer Science,Y angtze University,Jingzhou 434023,China)Abstract: This paper presents a DSP-based train speed measurement by using Doppler radar. The structure of the system isintroduced.The hardware and software are also discussed.Key words: DSP; rader speed measurement; doppler principle1 引言目前,我国列车机车的运行速度装置主要都是采用光电式测速传感器来测速。
它的低速测量精度高。
但测速150公里以上时,存在着精度问题。
随着我国多次提速的发展,对于原来使用的光电式测速传感器进行速度采集的测速装置系统提出了新的要求,参照国外的高速列车测速装置的发展情况,我们对目前专为我国铁路市场开发的S3雷达测速传感器进行全面的测试。
DSP多普勒雷达测速测距精
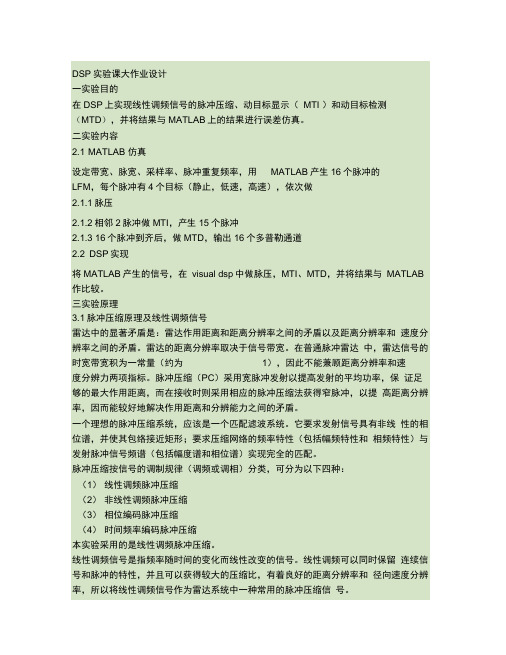
多晋勒滤波器J 频率响应i I-Fr0 Fr 九图3.3多普勒滤波器频响 此滤波器能够用来抑制噪声。
但同时把静态目标也给对消掉,也使得运动目标的 谱分量有部分的衰减,因此用 MTI —次相消器检测不出静止目标。
3.3 MTD (动目标检测)原理MTD 与MTI 同属雷达信号处理的频域处理范畴,但一般意义上来说, MTD 是 MTI 的改进或更有效的频域处理技术。
广义上地讲, MTD 处理又是多普勒处理的一种特殊形式与传统的 MTI 相比,MTD 改善了滤波器的频率特性,使之更接 近于最佳匹配线性滤波,以提高改善因子;能够检测强地物杂波的低速目标甚至 切向飞行的大目标。
MTD 的核心是线性MTI 加窄带 多普勒滤波器组。
根据最佳线性滤波理论,在杂波背景下检测运动目标回波,除 了杂波抑制滤波器外,还应串接有对脉冲串信号匹配的滤波器,实际工作中,多 普勒频移fd 不能预知,需要采用一组相邻且部分重叠的滤波器组覆盖整个多普勒 频率范围,这就是窄带多普勒滤波器组。
输入 N 个脉冲的横向滤波器组的实现是 由N 个输出的横向滤波器(N 个脉冲和N-1根迟延线)经过各脉冲不同的加权并 求和后形成的。
其实现方法下图所示:求和尿出輸入 -—► Tr >■・・■ Tr图3.4横向滤波器 图3.5 N=16时滤波器频响该滤波器的频率覆盖范围为0到fr , fr 为雷达工作重复频率。
气象杂波(如云雨等) 和箔条杂波受气流和风力的影响,会相对雷达而动,其频谱中心不是固定在0频 附近,而是在某个频率区间内变化的,抑制此类杂波用普通的MTI 滤波器是不行的,而MTD 滤波器则可以抑制此类杂波。
四实验步骤以下是该实验中设定的几个参数BandWidth=2.0e6 --------------------------------------------- 带宽TimeWidth=42.0e-6 ------------------------------------------- 脉宽Fs=2.0e6 ------------------------------------------------- 采样率PRT=240e-6 ------------------------------------------ 脉冲重复周期TargetDista nce=[3000 8025 8025 25600] ----------------- 目标距离TargetVelocity=[50 -100 0 283] -------------------------- 目标速度%其中X=0; Y=8; Z=3;对应学号1302121083的后三位假设接收到的回波数是16个,噪声为高斯随机噪声。
雷达测速原理
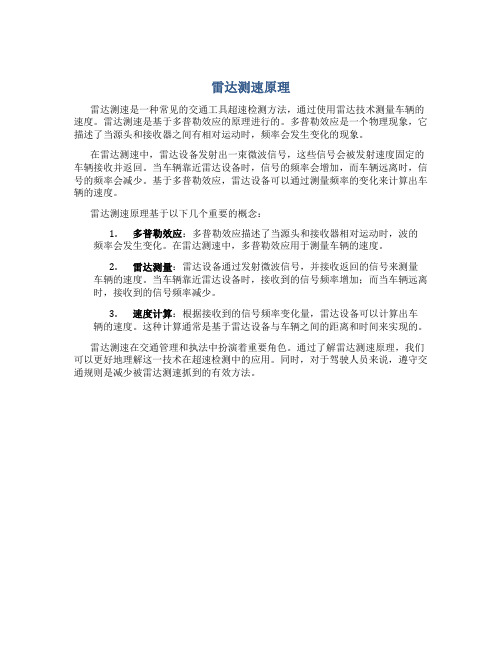
雷达测速原理
雷达测速是一种常见的交通工具超速检测方法,通过使用雷达技术测量车辆的速度。
雷达测速是基于多普勒效应的原理进行的。
多普勒效应是一个物理现象,它描述了当源头和接收器之间有相对运动时,频率会发生变化的现象。
在雷达测速中,雷达设备发射出一束微波信号,这些信号会被发射速度固定的车辆接收并返回。
当车辆靠近雷达设备时,信号的频率会增加,而车辆远离时,信号的频率会减少。
基于多普勒效应,雷达设备可以通过测量频率的变化来计算出车辆的速度。
雷达测速原理基于以下几个重要的概念:
1.多普勒效应:多普勒效应描述了当源头和接收器相对运动时,波的
频率会发生变化。
在雷达测速中,多普勒效应用于测量车辆的速度。
2.雷达测量:雷达设备通过发射微波信号,并接收返回的信号来测量
车辆的速度。
当车辆靠近雷达设备时,接收到的信号频率增加;而当车辆远离时,接收到的信号频率减少。
3.速度计算:根据接收到的信号频率变化量,雷达设备可以计算出车
辆的速度。
这种计算通常是基于雷达设备与车辆之间的距离和时间来实现的。
雷达测速在交通管理和执法中扮演着重要角色。
通过了解雷达测速原理,我们可以更好地理解这一技术在超速检测中的应用。
同时,对于驾驶人员来说,遵守交通规则是减少被雷达测速抓到的有效方法。
多普勒雷达测速

多普勒雷达多普勒雷达测速是一种直接测量速度和距离的方法;在列车上安装多普勒雷达,始终向轨面发射电磁波,由于列车和轨面之间有相对运动,根据多普勒频移效应原理,在发射波和反射波之间产生频移,通过测量频移就可以计算出列车的运行速度,进一步计算出列车运行的距离;克服了车轮磨损、空转或滑行等造成的误差,可以连续测速、测向和定位;多普勒效应当发射源或接收者相对介质运动时,接收者接收到的电磁波的频率和发射源的频率不同,这种现象被称为多普勒效应;物体辐射的波长因为光源和观测者的相对运动而产生变化;在运动的波源前面,波被压缩,波长变得较短,频率变得较高蓝移;在运动的波源后面,产生相反的效应;波长变得较长,频率变得较低红移;波源的速度越高,所产生的效应越大;根据光波红/蓝移的程度,可以计算出波源循着观测方向运动的速度;多普勒效应,介质中波速为c则假设原有波源的波长为λ,频率为f1当波源静止不动Vs=0,观察者以V0相对波源移动向波源方向2当观察者静止不动V0=0,波源以Vs相对观察者移动向观察者方向3当波源移动速度为Vs,观察者移动速度为V0,相对运动,此时介质中的波长和观察者接收到的波的个数都有变化多普勒雷达的测速原理多普勒雷达法利用多普勒效应测量列车运行速度;在车头位置安装多普勒雷达,雷达向地面发送一定频率的信号,并检测反射回来的信号;由于列车的运动会产生多普勒效应,所以检测到的信号其频率与发送的信号频率是不完全相同的;如果列车在前进状态,反射的信号频率高于发射信号频率;反之,则低于发射信号频率;而且,列车运行速度越快,两个信号之间的频率差越大;通过测量两个信号之间的频率差就可以获取列车的运行方向和即时运行速度,对列车的速度进行积分就可得到列车的运行距离;多普勒雷达的测速原理雷达发射电磁波的频率为F,在介质中的传播速度为c,发射角为a1, 当雷达以速度V平行于反射面运动反射面静止,则在反射面接收到的波频率为f1而此时反射面把波反射回去,相当于波源静止,雷达接收反射回来的波, 相当于观察者平行反射面速度为V,由于雷达的运动,入射角为a2,则雷达接收到的波频率为f2多普勒雷达的测速原理发射波与接收波的频移为由于雷达运动的速度V远远小于电磁波的速度c,可以近似认为入射角a2=a1,则频移将上式展为泰勒级数,并舍去高次项,可得也就是说,发射波与入射波之间的频移fr与雷达的速度V沿发射波方向的分量的大小成正比;如果发射角a1固定,则频移fr就是与雷达速度V成正比,只要测量出频移fr 的值,就可以计算出雷达的运动速度V误差来源•为了简化计算,减少处理难度,一般都会取简化后的公式来计算,然而,由于简化公式是通过舍入的方法进行简化得,简化公式与原公式之间存在一定误差, 这样在使用简化公式之前就要先考虑这个误差对计算的影响;•列车运行的过程中,由于轨面不平整或其他原因,列车会产生振动,但列车的振动基本上都是车体的高频上下小幅度运动•多普勒雷达速度传感器的安装误差也会对测速有一定的影响;理想情况下, 多普勒雷达发射电磁波的方向在列车速度方向的纵轴面上,且与水平面成a角度;但是由于安装误差,电磁波的发射方向会与预定的方向有一定的偏差;惯性导航系统惯性导航系统INS是一种典型的独立定位技术;它与电磁辐射、地球磁场等辐射能量都无关,是建立在牛顿经典力学基础上的;牛顿经典力学认为,一个物体在不受到外力的作用时,保持静止或者匀速直线运动;而且物体的加速度是与所收到的外力成正比的;加速度的积分是速度,依着这个思路,如果我们能够获得运动物体的加速度,进而也能获得这个物体的速度和位置信息;INS系统的优点是:它的定位过程不需要磁罗盘,也不需要专用地图匹配;系统的精度几乎完全由组成系统的各元件精度决定;并且在短时问它能够保持较高的精度;但是它的系统精度主要取决于惯性测量器件陀螺仪和加速度计,导航参数的误差随时间而积累,因而不适合长时间的单独导航;惯性导航系统组合惯性力的作用促使传感器产生变化,这个变化量与加速度值有关;同时变化量导致传感器将其转化为电压的变化,通过测量电压的变化间接的得到加速度值;根据一个高速旋转的物体,它的旋转轴在不受到外力的影响时是不会发生改变的原理;模拟一个导航坐标系,获取方位和角速度信息;完成导航计算和平台跟踪回路中指令角速度信号的计算;刚才分析了几种多普勒测速误差,那对于误差有没有什么改进措施城轨定位方法研究P30詹纳斯配置能有效的减少多普勒雷达测速的振动误差在列车底中线上紧挨着安装两个多普勒雷达,安装的方向是相反的,设列车前进方向发射电磁波的雷达为前雷达,相反方向的为后雷达,前后雷达分别向列车前进方向及反方向各发一束电磁波,并计算它们的频差。
基于DSP的雷达测速监控系统的设计

基于DSP的雷达测速监控系统的设计
贾杰;凌欢
【期刊名称】《电子技术应用》
【年(卷),期】2010(036)012
【摘要】介绍了基于DSP芯片TMS320VC5502的雷达测速监控系统的设计.利用了多普勒效应原理,对运动车辆产生的多普勒频率进行频谱分析,计算行驶速度.针对雷达测速监控的需要,提出了扩展PAL/NTSC制式视频接口采集超速车辆视频图像信息的方法.采用了RS一485接口传输JPEG视频图像压缩数据,提高了系统的可靠性和实用性.
【总页数】5页(P78-81,85)
【作者】贾杰;凌欢
【作者单位】南昌航空大学,江西,南昌,330063;南昌航空大学,江西,南昌,330063【正文语种】中文
【中图分类】TN953+.1
【相关文献】
1.基于DSP的交通雷达测速仪设计 [J], 李之果;张宇波;任军霞
2.基于DSP的车载雷达测速系统设计 [J], 唐伟;孙志芳;陈全
3.基于DSP5402的雷达测速系统硬件、软件设计 [J], 杨文君;林伟
4.基于DSP和CAN的机电环境设备监控系统模块化设计 [J], 张鑫;张向顺;赵惟诚;郭永志
5.基于DSP的智能电网自动调度实时监控系统设计 [J], 温河;孙林华
因版权原因,仅展示原文概要,查看原文内容请购买。
(完整版)多普勒效应和雷达测速
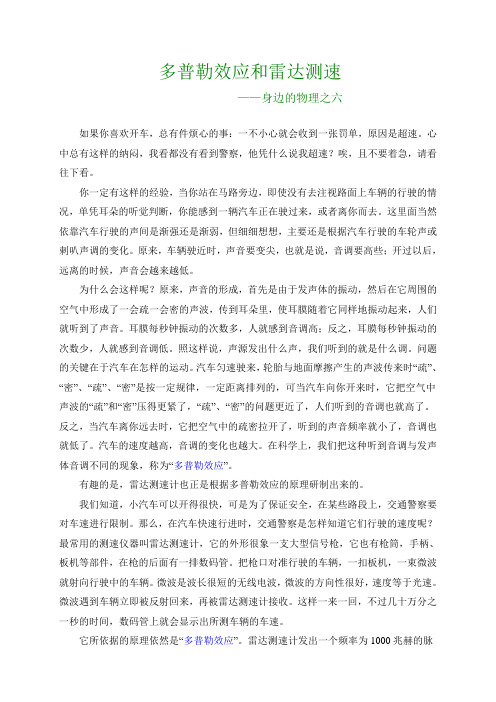
多普勒效应和雷达测速——身边的物理之六如果你喜欢开车,总有件烦心的事:一不小心就会收到一张罚单,原因是超速。
心中总有这样的纳闷,我看都没有看到警察,他凭什么说我超速?唉,且不要着急,请看往下看。
你一定有这样的经验,当你站在马路旁边,即使没有去注视路面上车辆的行驶的情况,单凭耳朵的听觉判断,你能感到一辆汽车正在驶过来,或者离你而去。
这里面当然依靠汽车行驶的声间是渐强还是渐弱,但细细想想,主要还是根据汽车行驶的车轮声或剌叭声调的变化。
原来,车辆驶近时,声音要变尖,也就是说,音调要高些;开过以后,远离的时候,声音会越来越低。
为什么会这样呢?原来,声音的形成,首先是由于发声体的振动,然后在它周围的空气中形成了一会疏一会密的声波,传到耳朵里,使耳膜随着它同样地振动起来,人们就听到了声音。
耳膜每秒钟振动的次数多,人就感到音调高;反之,耳膜每秒钟振动的次数少,人就感到音调低。
照这样说,声源发出什么声,我们听到的就是什么调。
问题的关键在于汽车在怎样的运动。
汽车匀速驶来,轮胎与地面摩擦产生的声波传来时“疏”、“密”、“疏”、“密”是按一定规律,一定距离排列的,可当汽车向你开来时,它把空气中声波的“疏”和“密”压得更紧了,“疏”、“密”的问题更近了,人们听到的音调也就高了。
反之,当汽车离你远去时,它把空气中的疏密拉开了,听到的声音频率就小了,音调也就低了。
汽车的速度越高,音调的变化也越大。
在科学上,我们把这种听到音调与发声体音调不同的现象,称为“多普勒效应”。
有趣的是,雷达测速计也正是根据多普勒效应的原理研制出来的。
我们知道,小汽车可以开得很快,可是为了保证安全,在某些路段上,交通警察要对车速进行限制。
那么,在汽车快速行进时,交通警察是怎样知道它们行驶的速度呢?最常用的测速仪器叫雷达测速计,它的外形很象一支大型信号枪,它也有枪筒,手柄、板机等部件,在枪的后面有一排数码管。
把枪口对准行驶的车辆,一扣板机,一束微波就射向行驶中的车辆。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
DSP 实验课大作业设计一 实验目的在DSP 上实现线性调频信号的脉冲压缩、动目标显示(MTI )和动目标检测(MTD),并将结果与MATLAB 上的结果进行误差仿真。
二 实验内容2.1 MATLAB 仿真设定带宽、脉宽、采样率、脉冲重复频率,用MATLAB 产生16个脉冲的LFM ,每个脉冲有4个目标(静止,低速,高速),依次做2.1.1 脉压2.1.2 相邻2脉冲做MTI ,产生15个脉冲2.1.3 16个脉冲到齐后,做MTD ,输出16个多普勒通道2.2 DSP 实现将MATLAB 产生的信号,在visual dsp 中做脉压,MTI 、MTD ,并将结果与MATLAB 作比较。
三 实验原理3.1 脉冲压缩原理及线性调频信号雷达中的显著矛盾是:雷达作用距离和距离分辨率之间的矛盾以及距离分辨率和速度分辨率之间的矛盾。
雷达的距离分辨率取决于信号带宽。
在普通脉冲雷达中,雷达信号的时宽带宽积为一常量(约为1),因此不能兼顾距离分辨率和速度分辨力两项指标。
脉冲压缩(PC )采用宽脉冲发射以提高发射的平均功率,保证足够的最大作用距离,而在接收时则采用相应的脉冲压缩法获得窄脉冲,以提高距离分辨率,因而能较好地解决作用距离和分辨能力之间的矛盾。
一个理想的脉冲压缩系统,应该是一个匹配滤波系统。
它要求发射信号具有非线性的相位谱,并使其包络接近矩形;要求压缩网络的频率特性(包括幅频特性和相频特性)与发射脉冲信号频谱(包括幅度谱和相位谱)实现完全的匹配。
脉冲压缩按信号的调制规律(调频或调相)分类,可分为以下四种:(1)线性调频脉冲压缩(2)非线性调频脉冲压缩(3)相位编码脉冲压缩(4)时间频率编码脉冲压缩本实验采用的是线性调频脉冲压缩。
线性调频信号是指频率随时间的变化而线性改变的信号。
线性调频可以同时保留连续信号和脉冲的特性,并且可以获得较大的压缩比,有着良好的距离分辨率和径向速度分辨率,所以将线性调频信号作为雷达系统中一种常用的脉冲压缩信号。
接收机输入端的回波信号是经过调制的宽脉冲,所以在接收机中应该设置一个与发射信号频率匹配的滤波器,使回波信号变成窄脉冲,同时实现了宽脉冲的能量和窄脉冲的分辨能力。
解决了雷达发射能量及分辨率之间的矛盾。
匹配滤波器是指输出信噪比最大准则下的最佳线性滤波器。
根据匹配理论, 匹配滤波器的传输特性:0)()(*t j e KS H ωωω-=其中,K 为幅度归一化常数,)(*ωS 为信号)(ωS 的复共轭。
传输特性)(ωH 还可用它的冲激响应)(t h 来表示(时域表示):)()(0*t t Ks t h -=。
3.2 MTI (动目标显示)原理在雷达终端的显示器,当杂波与运动的目标在显示器上同时出现时,观察将会变得困难,特别是在强杂波时,弱的目标信号将会完全被淹没。
由于目标回波的多普勒频移远大于杂波的多普勒频移,从而可在频域上区分目标与杂波。
MTI 的设计主要是合理的选择滤波器,动目标显示滤波器(MTI )利用运动目标回波和杂波在频谱上的区别,有效地抑制杂波而提取信号。
由下图可以看出回波信号(含杂波与目标):图3.1 回波信号杂波主要集中在0频附近,在频率为0处,所设计的滤波器频率响应应有凹口。
以使地物杂波在通过MTI 滤波器后将受到很大的抑制,对于每一个脉冲,其回波信号中的杂波分量都基本相同,而运动目标产生多普勒频移。
对连续脉冲对的回波进行相减,就可以完全对消杂波分量,而目标信号由于其相位的改变,通常不会完全被对消掉。
常用的MTI 滤波器为一次相消器(二脉冲对消)。
在同一距离上等效一个有效的采样间隔PRF T 1=的离散时间序列)(n x 。
其时域方程为:)1()()(--=n x n x n y ,传输函数为:11)(--=z z H ,在Z=1处有单零点,频率响应为:)2cos 2(sin 2sin 21)(Tj TTe e H t j j ωωωωω+=-=-。
其在零频有一凹口,如图所示:图3.3 多普勒滤波器频响此滤波器能够用来抑制噪声。
但同时把静态目标也给对消掉,也使得运动目标的谱分量有部分的衰减,因此用MTI 一次相消器检测不出静止目标。
3.3 MTD (动目标检测)原理MTD 与MTI 同属雷达信号处理的频域处理范畴,但一般意义上来说,MTD 是MTI 的改进或更有效的频域处理技术。
广义上地讲,MTD 处理又是多普勒处理的一种特殊形式与传统的MTI 相比,MTD 改善了滤波器的频率特性,使之更接近于最佳匹配线性滤波,以提高改善因子;能够检测强地物杂波的低速目标甚至切向飞行的大目标。
MTD 的核心是线性MTI 加窄带多普勒滤波器组。
根据最佳线性滤波理论,在杂波背景下检测运动目标回波,除了杂波抑制滤波器外,还应串接有对脉冲串信号匹配的滤波器,实际工作中,多普勒频移d f 不能预知,需要采用一组相邻且部分重叠的滤波器组覆盖整个多普勒频率范围,这就是窄带多普勒滤波器组。
输入N 个脉冲的横向滤波器组的实现是由N 个输出的横向滤波器(N 个脉冲和N-1根迟延线)经过各脉冲不同的加权并求和后形成的。
其实现方法下图所示:图3.4 横向滤波器 图3.5 N=16时滤波器频响 该滤波器的频率覆盖范围为0到r f ,r f 为雷达工作重复频率。
气象杂波(如云雨等)和箔条杂波受气流和风力的影响,会相对雷达而动,其频谱中心不是固定在0频附近,而是在某个频率区间内变化的,抑制此类杂波用普通的MTI 滤波器是不行的,而MTD 滤波器则可以抑制此类杂波。
四 实验步骤以下是该实验中设定的几个参数BandWidth=2.0e6----------------------------------------------带宽TimeWidth=42.0e-6--------------------------------------------脉宽Fs=2.0e6---------------------------------------------------采样率PRT=240e-6-------------------------------------------脉冲重复周期TargetDistance=[3000 8025 8025 25600] ------------------目标距离TargetVelocity=[50 -100 0 283]---------------------------目标速度%其中X=0; Y=8; Z=3;对应学号1302121083的后三位假设接收到的回波数是16个,噪声为高斯随机噪声。
4.1 在MATLAB 中产生线性调频信号。
4.2 根据目标距离得出目标回波在时域的延迟量,根据目标速度得出多普勒相移,从而在MATLAB 中产生4个目标的16个回波串(接收到的回波含噪声)。
4.3 由匹配滤波理论产生对应于目标回波的滤波系数(脉压系数),在时域中做线性卷积,实现匹配滤波(时域脉压);在频域中做回波信号和脉压系数的FFT ,点乘后作逆FFT ,实现频域脉压。
两者进行比较,讨论其差别。
4.4 对16个去暂态点后的脉冲串按接收顺序进行排列,用一次相消器(一种滤波方式)实现MTI 。
4.5 做16通道的FFT ,实现MTD 。
4.6 在DSP 中对MATLAB 产生的回波数据和脉压系数进行处理,实现频域脉压。
导入DSP 的回波数据为时域数据,而脉压系数为频域数据。
将导入DSP 的时域回波数据进行一次FFT 变换到频域,然后将其与频域脉压系数进行点积,得到频域脉压结果。
对该结果再做一次逆FFT ,将频域转换成时域。
在这一步中需要调用库函数fft_flp32.asm 。
该子程序可实现8192点复数的FFT 功能。
由于C 语言中无法实现复数运算,因此,对8192个复数按照实部虚部交替的顺序进行重排列,用长度为16384的数组来存放时域回波数据。
频域相乘后,做乘积结果的逆FFT ,得到脉压结果。
做逆FFT ,仍需调用库函数fft_flp32.asm ,此时要通过FFT 子程序实现逆FFT 的功能,要对频域的数据进行处理,才能达到这一目的。
4.7 对脉压后的数据按照脉冲号重排,相邻序列的数据相减(滑动对消),实现MTI 。
4.8 调用子程序fft_16.asm ,做16通道FFT ,实现MTD 。
入口参数为16通道的脉压数据。
五 实验结果及讨论本部分将详细分析实验得到的数据、图像、误差、产生速度模糊的原因以及脉压频域、时域执行周期。
5.1MATLAB 中时域脉压和频域脉压结果的比较:图5.1 总回波信号,时域脉压,频域脉压,时域脉压和频域脉压的差别 从图中可以看出,时频域脉压结果差别很小,相对误差停留在10-14数量级上。
其实,二者结果应该是相等的。
由于MA TLAB 与DSP 软件处理平台及编程函数的计算精度和中间结果处理的差异,才出现以上很小的误差。
由数字信号处理理论,M 点时域离散信号与N点时域离散信号做线性卷积后的信号长度为N+M-1。
设)(),(n b n a 为数字信号,长度分别为M 和N ,));(()());(()(n b DFT k B n a DFT k A ==如果)(),(k B k A 的长度1-+≥M N L ,则))()(()(*)(k B k A IDFT n b n a ⨯=。
回波数据echo 长为7680点,脉压系数coeff 长为84点,N+M-1=7680+84-1=7763,为提高FFT 速度,取L=8192,对回波数据、脉压系数的FFT 乘积后的结果做IFFT 就可以实现脉冲压缩。
经统计,在DSP 上频域脉压处理(从FFT 到IFFT )的时钟数为。
设两个卷积的序列长度分别为M 和N ,且N>M ,则卷积所用的复乘数为N ×M ,而N 点FFT 的运算量为log N N 22次复数乘法运算和2log N N 次复数加法运算。
当序列长度N 、M 很大时,频域的总运算量将大大低于时域的运算量。
在本实验中,回波数据的长度N=7680,脉压系数长度M=84,时域脉压的运算量为N ×M=7680×84+83=645203次复数加法运算和645036次复数乘法运算。
由于L>N+M-1,将x(n),h(n)分别补L-N 和L-M 个零变成两个长度均为L (8192)的序列)()(n h n x L L 、,分别做L 点FFT ,点积后再做逆FFT ,可以实现频域脉压。
频域脉压的8192点FFT 和IFFT 的运算量为2×0.5×8192×2log 8192=106496次复数乘法运算和0.5×2×8192×2log 8192=106496次复数加法运算。