雷达测距、测角、测速基本原理
雷达测距测速原理

雷达测距测速原理雷达是一种利用电磁波进行测距和测速的技术。
雷达测距测速原理基于电磁波在空间中传播的特性,通过发送电磁波并接收返回信号来计算目标物体的距离和速度。
雷达测距的原理是利用电磁波的传播速度和接收到返回信号的时间差来计算目标物体的距离。
雷达发射器会发射一束电磁波,这束电磁波会在空间中传播,并与目标物体相互作用。
当电磁波与目标物体相互作用后,一部分电磁波会被目标物体反射回来,形成返回信号。
雷达接收器会接收到这个返回信号,并测量从发射到接收的时间差。
根据电磁波在空间中传播的速度,可以通过时间差计算出目标物体与雷达的距离。
雷达测速的原理是基于多普勒效应。
当目标物体相对于雷达静止时,返回信号的频率与发射信号的频率相同。
但是当目标物体相对于雷达运动时,返回信号的频率会发生改变。
根据多普勒效应的原理,当目标物体向雷达靠近时,返回信号的频率会增加;当目标物体远离雷达时,返回信号的频率会减小。
通过测量返回信号的频率变化,就可以计算出目标物体的速度。
雷达测距测速原理的关键在于精确测量发射和接收之间的时间差以及返回信号的频率变化。
为了提高测量的精度,雷达系统通常会采用高频率的电磁波。
高频率的电磁波具有较短的波长,能够更精确地测量距离。
同时,雷达系统还会使用高精度的时钟和频率计算器来确保测量的准确性。
雷达测距测速技术在很多领域都有广泛的应用。
在航空领域,雷达技术可以用于飞机的导航和防撞系统,通过测量其他飞机的距离和速度来确保飞行安全。
在交通领域,雷达技术可以用于交通监控和交通信号灯控制,通过测量车辆的距离和速度来优化交通流量。
在气象领域,雷达技术可以用于天气预报和气象监测,通过测量云层的距离和速度来预测降雨和风暴的情况。
雷达测距测速原理是一种利用电磁波进行测量的技术。
通过测量电磁波的传播时间和频率变化,可以准确计算目标物体的距离和速度。
雷达技术在许多领域都有广泛的应用,为人们的生活和工作提供了便利和安全。
雷达测距原理及实现方法

雷达测距原理及实现方法一、雷达测距原理雷达是利用无线电波进行探测和测距的一种技术。
雷达测距是通过测量从雷达到目标物体的往返时间差来估计目标的距离。
雷达测距的原理可以简单地概括为发射一束射频信号,当这个信号遇到目标时,部分能量被目标吸收或散射,剩下的能量会返回雷达。
雷达系统接收这个返回的信号,并测量从发送到返回信号的时间差,然后根据电磁波在空气中的传播速度,就可以计算出目标到雷达的距离。
具体实现雷达测距的原理有以下几种:1.脉冲测距原理:脉冲测距原理是利用发射一组很短的脉冲信号,并测量从发送到返回信号的时间来计算距离。
这种方法的特点是简单、精度较高,适用于对距离变化不频繁的目标进行测距。
2.相位测距原理:相位测距原理是利用发射一组连续波信号,并测量信号的相位变化来计算距离。
相位变化与距离成正比,并且可以通过频率测量的方法,精确计算出距离。
相位测距一般用于对动态目标进行测距。
3.干涉测距原理:干涉测距原理是利用发射两个相干的连续波信号,并测量两个信号之间的干涉现象来计算距离。
干涉测距具有高精度和高抗干扰性能的特点,适用于对距离变化频繁的目标进行测距。
4.多普勒测距原理:多普勒测距原理是利用目标在接收到的波的频率上所引起的多普勒频移来计算目标的速度和距离。
多普勒测距一般用于对移动目标进行测速和测距。
二、雷达测距实现方法实现雷达测距需要几个关键的组件和步骤:1.发射器和天线:发射器产生并发送无线电波的信号,天线用于辐射和接收电磁波。
2.接收器:接收器用于接收从目标返回的信号,并将其转换成电信号。
3.信号处理:接收到的信号经过信号处理子系统进行滤波、放大、调制等操作以提取出目标信息。
4.时间测量:雷达系统需要测量从信号发射到接收到返回信号的时间差。
可以通过多种方法实现时间测量,例如使用计数器、脉冲计时器等。
5.距离计算:根据从时间测量得到的时间差,结合电磁波在空气中的传播速度,通过计算得到目标到雷达的距离。
雷达技术原理

雷达技术原理本文将介绍雷达技术的工作原理。
雷达是一种主动式无线电测距测速系统,可以探测和跟踪远距离目标,并提供其位置、速度、大小等基本信息。
雷达技术在天文学、气象学、军事、民用航空等领域都有广泛的应用。
雷达的基本原理是利用电磁波在目标与雷达之间的传输、散射或反射,从而实现距离、方位和速度测量的目的。
雷达技术的工作原理雷达技术的工作原理涉及到电磁波的产生、传输、接收和处理等多个环节。
下面将分别介绍雷达系统中各部分的工作原理。
电磁波的产生雷达系统需要产生电磁波,以便进行测量。
为了产生电磁波,可以使用不同类型的电源,例如发电机、电池或光纤。
一般情况下,雷达系统会使用一台特殊的能够产生高频电磁波的设备,称为雷达发射机。
雷达发射机可以接收电源的电能,并将其转换成高频电磁波,然后将其输出到天线。
电磁波的传输电磁波在传输过程中会受到各种环境因素的干扰,例如气候、大气层、障碍物等。
电磁波的传播距离也会受到其频率和波长的影响。
雷达系统中常用的电磁波频率范围是从1 GHz到100 GHz,对应波长从30厘米到3毫米。
雷达系统一般会使用天线将产生的电磁波传输到目标,并接收其反射或散射回来的信号。
天线可以将电磁波转换为电流信号,并将其发送到雷达接收器进行处理。
电磁波的接收雷达系统的接收器需要能够接收反射或散射回来的电磁波信号,并将其转换为电流信号。
一般情况下,雷达系统会使用一台特殊的接收器,称为雷达接收机。
雷达接收机可以将接收到的电流信号转换为数字信号,并通过信号处理算法来提取目标的距离、方位和速度等信息。
电磁波的处理通过信号处理算法,雷达系统可以对接收到的电磁波信号进行分析,并提取出目标的距离、方位和速度等信息。
雷达系统会将上述信息通过显示屏、电子设备或计算机等方式传送给用户或操作员。
根据用户或操作员的需要,雷达系统可以实现不同的功能,例如探测、识别、追踪、导航或通信等。
雷达技术的应用雷达技术在天文学、气象学、军事和民用航空等领域都有广泛的应用。
连续波雷达测速测距原理

连续波雷达测速测距原理连续波雷达(Continuous Wave Radar,CWR)是一种常用的雷达测速测距技术,它利用连续发射和接收电磁波,通过测量波的往返时间和频率差,来精确测定目标物体的速度和距离。
本文将详细介绍连续波雷达的测速测距原理。
一、连续波雷达的原理当返回的波到达雷达时,雷达接收到波和发射的波之间存在一定的相位差。
而这个相位差可以用来计算出物体的距离。
具体的计算公式如下:距离=相位差×光速/(2×发射频率)在这个公式中,相位差是接收到的波和发射的波之间的相位差,光速为常数,发射频率为雷达发射的频率。
但是,单纯的通过距离无法获得目标物体的速度。
所以,连续波雷达需要通过测量频率差来计算目标物体的速度。
当目标物体以一定速度向雷达靠近或远离时,返回的波的频率会有一定的变化。
假设目标物体向雷达靠近,则返回的波的频率会增加。
频率的变化可以用来计算目标物体的速度。
具体的计算公式如下:速度=频率变化量×光速/(2×发射频率)在这个公式中,频率变化量为接收到的波的频率和发射的波的频率之差。
二、连续波雷达的应用在航空领域,连续波雷达常用于测量无人机的速度和距离,以及预警系统中。
通过测量无人机的速度,可以帮助准确控制无人机的行驶速度,并确保安全。
而通过测量无人机的距离,可以及时避免与其他航空器发生碰撞的危险。
在航海领域,连续波雷达常用于船舶的导航和控制系统中。
通过测量船舶与障碍物之间的距离,可以及时警示船舶避免碰撞。
同时,通过测量船舶的速度,可以帮助船舶准确抵达目的地,并且保持适当的速度,提高航行的效率。
在交通运输领域,连续波雷达常用于测速仪器和交通探测器中。
通过测量车辆的速度,可以帮助交通管理部门监测交通流量、控制交通信号,并保证车辆在道路上行驶的安全。
总结起来,连续波雷达利用波的往返时间和频率变化,实现对目标物体的精确测速测距。
在航空、航海、交通运输等领域发挥着重要作用,帮助我们提高交通的安全性和效率。
雷达测距、测角、测速基本原理
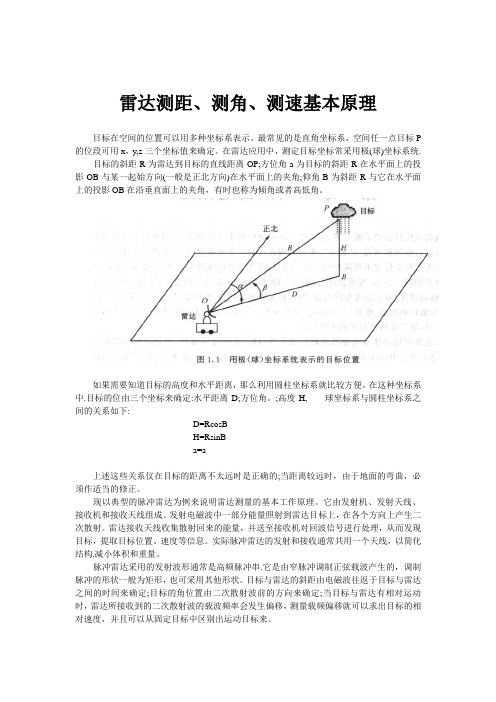
雷达测距、测角、测速基本原理目标在空间的位置可以用多种坐标系表示。
最常见的是直角坐标系,空间任一点目标P 的位段可用x,y,z三个坐标值来确定。
在雷达应用中,测定目标坐标常采用极(球)坐标系统.目标的斜距R为雷达到目标的直线距离OP;方位角a为目标的斜距R在水平面上的投影OB与某一起始方向(一般是正北方向)在水平面上的夹角;仰角B为斜距R与它在水平面上的投影OB在沿垂直面上的夹角,有时也称为倾角或者高低角。
如果需要知道目标的高度和水平距离,那么利用圆柱坐标系就比较方便。
在这种坐标系中.目标的位由三个坐标来确定:水平距离D;方位角。
;高度H, 球坐标系与圆柱坐标系之间的关系如下:D=RcosBH=RsinBa=a上述这些关系仅在目标的距离不太远时是正确的;当距离较远时,由于地面的弯曲,必须作适当的修正。
现以典型的脉冲雷达为例来说明雷达测量的基本工作原理。
它由发射机、发射天线、接收机和接收天线组成。
发射电磁波中一部分能量照射到雷达目标上,在各个方向上产生二次散射。
雷达接收天线收集散射回来的能量,并送至接收机对回波信号进行处理,从而发现目标,提取目标位置、速度等信息。
实际脉冲雷达的发射和接收通常共用一个天线,以简化结构.减小体积和重量。
脉冲雷达采用的发射波形通常是高频脉冲串.它是由窄脉冲调制正弦载波产生的,调制脉冲的形状一般为矩形,也可采用其他形状。
目标与雷达的斜距由电磁波往返于目标与雷达之间的时间来确定;目标的角位置由二次散射波前的方向来确定;当目标与雷达有相对运动时,雷达所接收到的二次散射波的载波频率会发生偏移,测量载频偏移就可以求出目标的相对速度,并且可以从固定目标中区别出运动目标来。
信息来源拓邦汽车电子网 地址:/news/2165.htm。
激光雷达测距测速原理

精心整理
激光雷达测距测速原理
1.激光雷达通用方程
激光雷达方程用来表示一定条件下,激光雷达回波信号的功率,其形式如下:
r P 为回波信号功率,t P 为激光雷达发射功率,K 是发射光束的分布函数,12a a T T 分别是激光雷达发射系统到目标和目标到接收系统的大气透过率,t r 分别是发射系统和接收系统的透过率,t 为发射激光的发散角,12R R 分别是发射系统到目标和目标到接收系统的距离,
为目标的雷达截面,r D 为接收孔径。
方程作用:激光雷达方程可以在研发激光雷达初期确定激光雷达的性能。
其次,激光雷达方程提供了回波信号与被探测物的光学性质之间的函数关系,因此可以通过激光雷达探测的回波信号,
通过求解激光雷达方程获得有关大气性质的信息。
2.激光雷达测距基本原理
2.1脉冲法
脉冲激光雷达测距的基本原理是,在测距点向被测目标发射一束短而强的激光脉冲,
激光脉冲到达目标后会反射回一部分被光功能接收器接收。
假设目标距离为L ,激光脉冲往返的时间间隔是
t ,光速为c ,那么测距公式为L=tc/2。
时间间隔t 的确定是测距的关键,实际的脉冲激光雷达利用时钟晶体振荡器和脉冲计数器来确
定时间t ,时钟晶体振荡器用于产生固定频率的电脉冲震荡
T=1/f ,脉冲计数器的作用就是对晶体振荡器产生的电脉冲计数N 。
如图所示,信息脉冲为发射脉冲,整形脉冲为回波脉冲,从发射脉冲开始,晶振产生脉冲与计数器开始计数时间上是同步触发
的。
因此时间间隔t=N T 。
由此可得出L=NC/2f 。
图1脉冲激光测距原理图
2.2相位法。
雷达测速仪工作原理

雷达测速仪工作原理一、引言雷达测速仪是一种常见的交通工具速度检测设备,广泛应用于交通管理、道路安全和执法等领域。
本文将详细介绍雷达测速仪的工作原理及其相关技术。
二、雷达测速仪的基本原理雷达测速仪通过发送和接收微波信号来测量车辆的速度。
其基本原理是利用多普勒效应,即当微波信号与运动的车辆相互作用时,信号的频率会发生变化。
根据多普勒效应,当车辆靠近雷达测速仪时,接收到的信号频率会增加;当车辆远离雷达测速仪时,接收到的信号频率会减小。
通过测量这种频率变化,可以计算出车辆的速度。
三、雷达测速仪的工作过程1. 发射信号:雷达测速仪通过天线发射微波信号,通常工作在K波段或Ka波段。
发射的信号经过天线发射出去,形成一个扇形的测速区域。
2. 接收信号:当发射的信号与运动的车辆相互作用时,车辆会反射部分信号回到雷达测速仪。
雷达测速仪的接收器通过天线接收到反射信号。
3. 信号处理:接收到的信号经过放大和滤波等处理,然后被送入频谱分析器。
频谱分析器会将信号分解成不同频率的分量。
4. 多普勒频移计算:通过对接收到的信号进行频谱分析,可以得到信号的频率变化情况。
根据多普勒效应,可以计算出车辆的速度。
5. 速度显示:根据计算得到的车辆速度,雷达测速仪将结果显示在屏幕上或通过其他输出方式呈现给操作人员。
四、雷达测速仪的技术特点1. 高精度:雷达测速仪采用微波信号测速,具有较高的测速精度,通常可以达到±1公里/小时。
2. 长测距:雷达测速仪的工作距离通常在几百米到几千米之间,能够实现对远距离车辆的测速。
3. 多目标测速:雷达测速仪可以同时测量多个车辆的速度,适用于高速公路等车流量大的场景。
4. 抗干扰能力强:雷达测速仪采用复杂的信号处理算法,能够有效抵抗干扰信号,提高测速的准确性和可靠性。
五、雷达测速仪的应用领域1. 交通管理:雷达测速仪广泛应用于交通管理,可以帮助交警部门监控道路交通情况,及时发现和处理超速行驶的车辆。
雷达测速仪工作原理

雷达测速仪工作原理雷达测速仪是一种常用的交通工具速度监测设备,它通过发送和接收无线电波来测量车辆的速度。
雷达测速仪的工作原理是基于多普勒效应,通过测量车辆反射回来的无线电波的频率变化来计算车辆的速度。
下面将详细介绍雷达测速仪的工作原理。
一、发射器发射无线电波1.1 雷达测速仪内部装有一个发射器,它会发射出无线电波。
1.2 发射器会以恒定的频率发射无线电波,通常频率在几千兆赫兹到几十千兆赫兹之间。
1.3 发射器会将无线电波以一定的角度发射出去,形成一个射线。
二、接收器接收反射回来的无线电波2.1 发射的无线电波会被车辆表面反射回来。
2.2 雷达测速仪内部装有一个接收器,它会接收反射回来的无线电波。
2.3 接收器会测量反射回来的无线电波的频率。
三、测量频率变化计算车辆速度3.1 当车辆挨近雷达测速仪时,反射回来的无线电波的频率会增加。
3.2 当车辆远离雷达测速仪时,反射回来的无线电波的频率会减小。
3.3 雷达测速仪会通过测量反射回来的无线电波的频率变化来计算车辆的速度。
四、精确计算车辆速度4.1 雷达测速仪会对反射回来的无线电波的频率变化进行精确测量。
4.2 雷达测速仪会根据多普勒效应的原理,将频率变化转换为车辆的速度。
4.3 雷达测速仪可以在不同距离和速度下准确计算车辆的速度。
五、应用于交通监控和安全5.1 雷达测速仪广泛应用于交通监控和安全领域,可以匡助警察测量车辆的速度。
5.2 雷达测速仪可以有效监控道路上的车辆速度,减少交通事故的发生。
5.3 雷达测速仪的工作原理简单有效,是一种常用的交通工具速度监测设备。
综上所述,雷达测速仪通过发射和接收无线电波,并测量频率变化来计算车辆的速度,广泛应用于交通监控和安全领域。
其工作原理简单有效,是一种重要的交通工具速度监测设备。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
雷达测距、测角、测速基本原理
目标在空间的位置可以用多种坐标系表示。
最常见的是直角坐标系,空间任一点目标P 的位段可用x,y,z三个坐标值来确定。
在雷达应用中,测定目标坐标常采用极(球)坐标系统.
目标的斜距R为雷达到目标的直线距离OP;方位角a为目标的斜距R在水平面上的投影OB与某一起始方向(一般是正北方向)在水平面上的夹角;仰角B为斜距R与它在水平面上的投影OB在沿垂直面上的夹角,有时也称为倾角或者高低角。
如果需要知道目标的高度和水平距离,那么利用圆柱坐标系就比较方便。
在这种坐标系中.目标的位由三个坐标来确定:水平距离D;方位角。
;高度H, 球坐标系与圆柱坐标系之间的关系如下:
D=RcosB
H=RsinB
a=a
上述这些关系仅在目标的距离不太远时是正确的;当距离较远时,由于地面的弯曲,必须作适当的修正。
现以典型的脉冲雷达为例来说明雷达测量的基本工作原理。
它由发射机、发射天线、接收机和接收天线组成。
发射电磁波中一部分能量照射到雷达目标上,在各个方向上产生二次散射。
雷达接收天线收集散射回来的能量,并送至接收机对回波信号进行处理,从而发现目标,提取目标位置、速度等信息。
实际脉冲雷达的发射和接收通常共用一个天线,以简化结构.减小体积和重量。
脉冲雷达采用的发射波形通常是高频脉冲串.它是由窄脉冲调制正弦载波产生的,调制脉冲的形状一般为矩形,也可采用其他形状。
目标与雷达的斜距由电磁波往返于目标与雷达之间的时间来确定;目标的角位置由二次散射波前的方向来确定;当目标与雷达有相对运动时,雷达所接收到的二次散射波的载波频率会发生偏移,测量载频偏移就可以求出目标的相对速度,并且可以从固定目标中区别出运动目标来。
信息来源拓邦汽车电子网 地址:/news/2165.htm。