7 雷达信号处理 14
雷达信号与数据处理--雷达信号处理基础 ppt课件

A 2
Q(
f
f0)
X( f ) A 2
A 2
Q(
f
f0)
f
f0
f0
X ( f ) sin π f
π f
fr ( f nfr )
n
fr 1/ Tr
6
随机信号与功率谱:
随机信号是指不可能用数学公式来确切地描述的信号,如接收机热噪声等。
x(t)
t
随机信号样本的波形
t
的矩形脉冲
Tr
x(t
)
A
cos(2πf0t 0,
),
t NTr / 2 t NTr / 2
A 2
Q(
f
f0)
z( f )
A
2
A 2 Q( f f0)
f
-f0
0
f0
X(
f
)
A 2
Q( f
f0) Q(
f
f0 )
Q( f ) sin(π f ) π f
9
广义平稳随机信号的自相关函数具有厄米特性质
Rx
(m)
E
xn
x* nm
Rx*
(m)
如果一个随机信号的所有统计特性都可以由它的某次样本来决定,就说它 是各态历经的。一个具有各态历经的性质的随机信号一定是狭义平稳的, 而且其数学期望运算可以用单次样本的时间平均运算来替代。
对于广义平稳的随机信号,常用功率谱来表征随机信号的频率特征。随机 信号功率谱等于其自相关函数的傅里叶变换。
Eg 表示数学期望
雷达侦察的信号处理
从任一PDWi,j起,如能其后出现N个连续的周期 都能与某雷达信号的tPRI特征相符合,则此PDWi,j 便被作为该雷达的一个分选脉冲;如果在T时间内
的分选脉冲数多于检测门限V,便判为该雷达存
在,否则为不存在。——动态关联法
20
如果在输入信号 si(t) 中同时存在两个信号si1(t)、
si2(t),则由于信号的交调,将使合成信号si(t)的包络 呈现较复杂的起伏。 |si(t)|={|si1|2+|si2|2+2|si2|cos[(ω1-ω2)t+ φ1-φ2]}1/2
图4―5 si(t)中同时存在两个信号时的包络
(2)由信号处理设备根据不同的雷达和雷达信号特 征,对输入的实时PDW信号流进行辐射源分选、 参数估计、辐射源识别、威胁程度判别和作战态 势判别等。
3
雷达侦察系统前端输出的{PDWi}∞i=0的具体内容 和数据格式取决于侦察系统前端的组成和性能。 在典型的侦察系统
{PDWi (AOAi , fRFi ,tTOAi , PWi , APi , Fi )}i0
(a)合成矢量;(b)合成波形
21
τPW的测量
门限检测启动前,脉宽计数器的初值为零, 门限检测信号①启动 脉宽计数器对时钟②计数,当sv(t)低于门限UT时,信号①使计数器 停止计数,①的后沿使读出脉冲触发器产生锁存信号③,将脉宽 计数值存入τPW参数锁存器,③的后沿微分信号④使脉宽计数器 重新清零,以便进行下一脉冲的脉宽测量。
与下一个中心 值进行比较
N
误差范围?
N
和所有类别中 心进行了比较?
Y 将该脉冲作为新类
【计算机仿真】_雷达信号处理_期刊发文热词逐年推荐_20140724
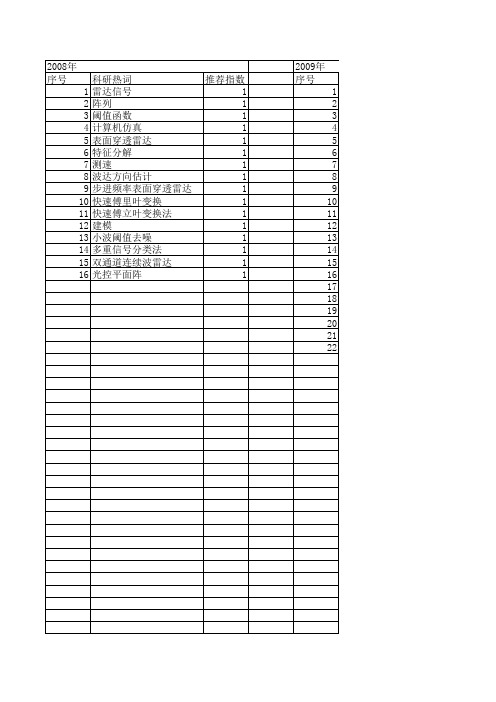
推荐指数 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2009年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22
2009年 科研热词 合成孔径雷达 风切变探测 韦布尔分布 零记忆非线性变换 距离走动 距离-多普勒 脉冲对处理 目标识别 目标定位 电磁特性 探地雷达 快速傅立叶变换 建模 小波变换 小斜视角 多频连续波雷达 多目标信号 卫星影像 加速度、速度估计 前视风切变雷达 分布目标模型 仿真 推荐指数 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
推荐指数 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2012年 序号 1 2 3 4源自5 6 7 8 92012年 科研热词 超宽带 等效相位中心原理 直达波去除 目标检测 步进变频穿墙雷达 奇异值分解 合成孔径雷达 下视成像 三维成像 推荐指数 1 1 1 1 1 1 1 1 1
2008年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
科研热词 雷达信号 阵列 阈值函数 计算机仿真 表面穿透雷达 特征分解 测速 波达方向估计 步进频率表面穿透雷达 快速傅里叶变换 快速傅立叶变换法 建模 小波阈值去噪 多重信号分类法 双通道连续波雷达 光控平面阵
2010年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
科研热词 雷达电子战 随机序列 随机地表模型 计算机仿真 脉冲多普勒雷达 目标回波 电磁散射 混沌信号 杂波 抗干扰 快速傅氏运算二维分解 宽带数宁波束形成 回波信号 噪声 功率谱 信号处理 仿真
雷达信号处理原理

雷达信号处理原理雷达(Radar)是利用电磁波传播的原理,通过接收和处理信号来探测、定位和追踪目标的一种技术。
雷达信号处理是指对接收到的雷达回波信号进行解调、滤波、增强、特征提取等一系列处理操作,以获取目标的位置、速度、形状、材料等信息。
本文将介绍雷达信号处理的基本原理及其主要方法。
一、雷达信号处理基本原理雷达信号处理的基本原理可以归纳为以下几个步骤:回波信号采集、信号预处理、目标检测、参数估计和跟踪。
1. 回波信号采集雷达将发射出的脉冲信号转化为电磁波,通过天线向目标发送,并接收目标反射回来的回波信号。
回波信号会包含目标的位置、形状、速度等信息。
2. 信号预处理由于雷达接收到的回波信号存在噪声、多径干扰等问题,需要对信号进行预处理。
预处理的主要目标是消除噪声、降低多径干扰,并使信号满足后续处理的要求。
3. 目标检测目标检测是指在预处理后的信号中判断是否存在目标。
常用的目标检测算法包括:恒虚警率检测、动态门限检测、自适应门限检测等。
目标检测的结果通常是二值化图像,目标区域为白色,背景区域为黑色。
4. 参数估计参数估计是指根据目标检测结果,对目标的位置、速度、方位角等参数进行估计。
常用的参数估计方法包括:最小二乘法、卡尔曼滤波等。
参数估计的结果可以用来进一步对目标进行跟踪和识别。
5. 跟踪目标跟踪是指根据参数估计的结果,对目标在时间上的变化进行预测和跟踪。
常用的目标跟踪算法包括:卡尔曼滤波、粒子滤波等。
目标跟踪的结果可以用来对目标进行轨迹分析和行为预测。
二、雷达信号处理方法雷达信号处理方法主要包括:滤波、相关、谱估计、目标识别等。
1. 滤波滤波是对信号进行频率或时间域的处理,常用于去除噪声、消除多径干扰等。
常见的滤波器包括:低通滤波器、高通滤波器、带通滤波器等。
滤波的方法有时域滤波和频域滤波两种。
2. 相关相关是利用信号的自相关或互相关性质,计算信号之间的相似度。
在雷达信号处理中,相关常用于目标的距离测量和速度测量。
第三章雷达信号模型及信号处理

雷达信号处理基础理论研究与应用

雷达信号处理基础理论研究与应用雷达信号处理是一门交叉学科,涉及到数学、物理、电子等多个领域。
其主要研究对象是雷达数据,即通过雷达接收到的回波信号,结合雷达技术以及信号处理技术对其进行分析、处理和识别,实现对目标的探测、跟踪和定位。
雷达信号处理的基础理论主要包括信号检测、参数估计和目标识别等方面。
其中,信号检测是雷达信号处理的基础,其研究的是如何在噪声背景下有效地识别目标回波信号,并提取出其中的信息。
在信号检测中,常用的指标有信噪比、虚警概率和漏警概率等,其目的是在尽可能保持目标检测正确率的同时,尽量减小误检率和漏检率。
参数估计是雷达信号处理中比较重要的一环,其研究的是如何从雷达接收到的信号中提取目标的相关参数。
雷达信号中的目标参数主要包括目标的距离、速度和角度等方面,常用的方法有FFT、MTI、FMCW等。
此外,由于雷达信号经常会因为多径效应、杂波干扰等因素而变形,所以参数估计还需要进行补偿或去除,以得到准确的目标参数。
目标识别是雷达信号处理中的核心问题之一,其研究的是如何从接收到的雷达信号中判断目标的种类、性质以及状态。
常用的目标识别方法有基于统计特征的方法、基于模式识别的方法以及神经网络等。
这些方法可以通过对目标回波信号的幅度、相位、波形等无穷多的方面进行分析来实现目标的识别。
除了基础理论研究外,雷达信号处理在实际应用中也发挥了重要的作用。
在军事、民用、环保、医疗等领域,雷达信号处理技术都有广泛的应用。
在军事领域中,雷达信号处理是实现军事情报、指挥控制以及武器装备识别等任务的基础。
通过对雷达信号的处理,可以实现对飞机、导弹、舰船等目标的探测、跟踪和定位,为军队的战术决策提供强有力的依据。
在民用领域中,雷达信号处理技术也有广泛的应用。
例如,在气象探测、地震勘探、航空、交通、导航、测绘等领域中都有用到雷达信号处理技术,为相应的工作提供重要的技术支持。
在环保领域中,雷达信号处理技术也有重要的应用。
雷达信号处理技术在目标识别中的应用教程
雷达信号处理技术在目标识别中的应用教程雷达技术是一种通过发送和接收电磁波来感知和探测目标的无线通信技术。
在雷达系统中,信号处理是非常重要的环节,它能够提取出目标的特征信息,并对目标进行识别。
本文将介绍雷达信号处理技术在目标识别中的应用教程。
一、雷达信号处理的基本流程雷达信号处理是从雷达接收到的回波信号中提取目标信息的过程。
其基本流程可以分为以下几个步骤:回波信号接收、杂波抑制、脉冲压缩、目标检测和跟踪、特征提取和目标识别。
1. 回波信号接收雷达通过发射电磁波,并接收由目标反射回来的回波信号。
回波信号包含了目标的位置、距离、速度等信息。
在接收回波信号时,需要采用合适的天线和接收系统来接收信号,并进行放大和滤波处理。
2. 杂波抑制在接收到的回波信号中,除了目标所反射的信号外,还包含了一些其他无关的杂波信号。
杂波抑制的目的是将这些杂波信号降低到一个较低的水平,以减小对目标的干扰。
常用的杂波抑制方法包括滤波、干扰消除等。
3. 脉冲压缩脉冲压缩是为了提高雷达系统的分辨能力和测距精度而进行的信号处理技术。
当发射的脉冲信号宽度较宽时,可以在接收端利用滤波器对回波信号进行压缩处理,使其变窄,并提高脉冲的能量密度。
4. 目标检测和跟踪目标检测是识别回波信号中是否存在目标的过程。
常用的目标检测算法有恒虚警率检测(CFAR)等。
目标跟踪是在连续的雷达回波信号中追踪目标的位置和运动状态。
常用的目标跟踪算法有卡尔曼滤波、粒子滤波等。
5. 特征提取和目标识别特征提取是从目标的回波信号中提取出与目标特征相关的参数或特征。
可以利用这些特征对目标进行识别。
常用的特征包括目标形状、速度、散射截面等。
目标识别是根据特征将目标与其他物体进行区分和识别的过程。
常用的目标识别算法有支持向量机、神经网络等。
二、雷达信号处理技术的应用雷达信号处理技术在目标识别中有着广泛的应用。
以下是几个典型的应用领域:1. 军事领域雷达在军事领域中起着至关重要的作用。
雷达信号处理概述

雷达信号处理概述雷达信号处理是指对观测到的信号进行分析、变换、综合等处理,以达到抑制干扰、杂波等非期望信号,增强有用信号,并估计有用信号的特征参数,或是将信号变成某种更符合要求的形式。
随着微电子技术的迅速发展,信号处理的方式也从早期的模拟域发展到几乎都采用数字域。
数字信号处理以数字或符号序列表示信号,用数值计算的方法完成对信号的各种处理。
模拟信号转换为数字信号的过程(采样、量化)如下图所示。
数字信号处理的主要方法有数字卷积(时域处理)、频谱分析(频域处理)、数字滤波(包括有限冲激响应滤波器(FIR)和无限冲激响应滤波器(IIR))等。
雷达信号处理的任务雷达信号处理的任务就是最大程度地抑制噪声和干扰,提取与目标属性有关的信息。
从狭义上讲,雷达信号处理是指对经接收机处理后的信号进行处理,在多种干扰背景中完成目标检测与信息的提取,主要包括干扰抑制、目标检测、信息提取。
从广义上讲,雷达信号处理涉及各种不同发射波形的选择、检测理论、性能评估以及天线和显示终端或数据处理计算机之间的电路装置(硬件和软件),以完成所要求的信号之间的变换和参数提取。
具体来说,信号处理包括信号产生、信号提取、信号变换三大类,其中信号产生包括调制、上变频、倍频、合成、放大和波束形成等;信号提取包括解调、下变频、分频、滤波、检测和成像等;信号变换包括频率变换、A/D变换、相关、放大及延时等。
根据雷达的任务及其工作环境,对雷达信号处理的要求是:•能够处理海量信息,即不仅能够获取目标的位置和数量等常规信息,还能获取目标的属性或图像信息•实时性强,使完成一次处理所用的时间与雷达的数据率相匹配•鲁棒性好,能够在复杂的电磁环境(特别是强电磁干扰环境)下正常工作实现上述要求取决于雷达的以下能力:•有效抑制杂波和干扰的能力•目标回波能量的有效收集能力,主要措施有:①改善天线的主瓣增益,降低旁瓣②降低天线转速,增加每个波位的驻留时间③选择能量利用率高的信号形式④提高雷达发射信号的峰值功率⑤距离维匹配滤波(脉冲压缩)⑥方位维一次扫描周期内对个波位的多个脉冲的相干和非相干积累⑦扫描周期间的积累(航迹提取)•高效的空间搜索能力•良好的空间分辨能力,主要措施有:①尽可能地增大天线的功率孔径积,提高角分辨能力②改进测角方式,提高角度测量精度③使用距离波门(时域滑窗)进行距离跟踪,减小多目标在频域的混叠④使用大带宽信号和脉冲压缩技术,提髙距离分辨能力⑤采用频率滤波,提高速度分辨能力⑥通过合成孔径,提高方位分辨能力⑦两天线干涉合成,提高俯仰角分辨能力•良好的环境适应能力:①自适应杂波抑制(自适应滤波、自适应CFAR、杂波图等)②自适应数字波束形成③智能化特征抽取和目标识别算法④多模式协同工作(例如预警机、多模式SAR)雷达信号处理的分类雷达信号处理的分类方法较多,按处理域分为时域信号处理、空域信号处理、频域信号处理、极化域信号处理和多域联合信号处理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
16
4
有效照射深度
近似圆柱体
V = π ⎜⎛ r θ ⎟⎞⎜⎛ r ϕ ⎟⎞ h = π⎜⎛ rθ ⎟⎞2 h , h =τc ⎝ 2 ⎠⎝ 2 ⎠ 2 ⎝ 2 ⎠ 2
Qt
(θ ,φ
)
=
PtG (θ ,φ )
4π R2
天线增益函数
天线的瞄准方向通常是天线最大增益方向,即 Gmax=G(0,0)
13
• 将增量在全空间进行积分,就得到了总的接收功 率,这就是广义的雷达距离方程:
∫ Pr
=
Ptλ 2
(4π )3 Ls
V
G2 (θ ,φ R4La ( R
))dσ
(
R,θ
,φ
17
满足瑞利散射时,有:
σi
= π5 λ4
K 2 Di6
K
2
=
m2 −1 m2 +2
2
m为复折射指数,对于厘米波段,当温度在0~20度时 水态时: K 2 =0.93
冰态时: K 2 =0.20
19
在第二节中已知,单位体积内的散射截面积为:
η = ∑ σi 单位体积
那么,气象目标的雷达方程可写为:
∑ Pr
(θ
,φ
)
=
PtG
(θ
,φ ) dσ (
4π R2
R,θ
,φ
)
考虑天线有效孔径,以及各种损耗,进一步得到增量的接收功率
dPr
=
PtG2 (θ ,φ ) λ2dσ ( R,θ ,φ ) (4π )3 R4Ls La ( R)
14
3、气象目标的雷达方程
• 气象目标属分布式目标范畴,距离门的回 波强度是分辨体积内所有粒子后向散射的 叠加。因此,与点目标雷达方程相比较, 解析气象目标的雷达方程要明确:
27
10 lg Z = 20 lg R +10 lg Pr −10 lg C
dBZ= 20lgR+(10lgPr −10lgPmin) −(10lgC −10lgPmin)
dBZ = 20 lg R +10 lg Pr −10 lg C
Pmin
Pmin
26
dB→dBZ 经过了距离订正 图像上的dBZ值远近可
5
天线有效接收面积
Ae
=
λ2 4π
G
Pr
=
Ss (π ) Ae
=
PtGσ (4πr2)2
Ae
6
不计衰减 回到雷达处的散射功率密度
7
8
2
目标接收到的功率
计入损耗 天线接收的功率
9
基本点目标雷达方程
10
点目标雷达方程推导过程总结
11
12
3
2、分布式目标雷达方程
• 点目标雷达方程是进行推导面散射、体散射雷达方 程的起点。对此,必须考虑天线功率增益随方位和 仰角的变化。那么发射的能流密度可写为:
=
PtG2λ2
(4π )3r4
σ
=
PtG2λ2
(4π )3r4
ηV
=
PtG2λ2
(4π )3r4
V σi
单位体积
∑ =
PtG2λ2
(4π )3r4
π⎜⎛ ⎝
rθ 2
⎟⎞2 ⎠
h 2
σi
单位体积
18
因此可以得到:
∑ ∑ σ i
单位面积
=
π5 λ4
K2
Di6
单位体积
又因为雷达反射率因子可以定义为
反射率因子
)
对于气象目标而言,要具体分析后向散射截面 与粒子直径、电磁波长之间的约束关系,以及 雷达扫描的空间分辨率与雷达参数的关系。
15
• 考虑位于距离和角度坐标(R,θ,φ)处的一个微小增量体积 dV的散射,假设该体积单元的增量RCS为dσm2,dσ也是随 空间位置而变化的。dV的增量后向散射功率为
dPb
以比较
28
7
计算1:
• 一雷达测得距离等于10km处的降水回波功率 度为70dBuw,1小时后该回波移到距离为 200km的地方,若降水目标的形状、强弱不 变,其它变化可以忽略,问:雷达测得的回 波功率应是多少?
29
10 −8
计算2:
• 距离为100公里处的雷达实测回波强度(功 率)值为10-8W,雷达常数C为10,则订正后 的雷达回波强度为多少dBZ?
• dBZ= 10lgPr+20lgR-10LgC=-80+40-10
•
=-50dBZ
31
• 根据气象雷达方程,
• 10lgPr1 = 10lgC + 10logZ – 20logR1 = 70dB • 10lgPr2 = 10lgC + 10logZ – 20logR2 = ? • (2)-(1)Æ
33
Rain Attenuation
The expected percentage of drops of specific sizes over precipitation rates is shown below.
34
4 强度回波积累及平均概念
35
36
9
驻留时间
• 天线扫描经历同一气象目标所花费的时间。 通常以天线波束3dB宽度作为驻留同一目标的 有效宽度。
N
∑ Z = Di6 i =1
20
5
∑ 因此
:
Pr
=
PtG 2λ2hθϕ
1024(ln 2)π 2r 2
σi
单位体积
∑ ⇒=
PtG 2λ2τcθϕ
1024(ln 2)π 2r 2
σi
单位体积
⇒=
PtG 2λ2τcθϕπ 3 K 2 Z
1024(ln 2)λ2r 2
21
Pr
=
c r2
Z
23
气象雷达常数
气象雷达原理与系统
电子工程学院 大气探测学院
1
1、点目标雷达方程
第六章 气象雷达信号处理基础(三) ——雷达方程、目标检测
• 点目标雷达方程 • 气象目标雷达方程 • 反射率、反射率因子、dBZ • 距离订正、强度回波积分处理 • 应用及分析
2
3
4
1
S s (π ) =
PtG σ (4π r 2 )2
• 10lgPr2 -70=-20log200+20log10
•
=-20(2+0.301)+20=-26dB
• 10lgPr2 =70-26=44(dBuw)
• 因此,雷达测得的回波功率应是44dBuw。
----(1) ----(2)
30
增加探测距离分析:
32
8
应用(1)----降水测量
The rainfall rate R can be empirically related to the reflectivity factor Z by the expression: Z = aRb
44
分辨率为0.54nm的基本谱宽
11
PPI Scan
45
基本反射率
47
观测现象
46
双旁 翅辨 状产 回生 波的
48
12
RHI Scan
RHI1
49
旁瓣回波
50
RHI上的假尖顶回波
51
52
13
53
14
37
径向内的雷达数据样本采集
驻留时间与样本数
样本数: M = PRF ×θ3dB
ω
PRF : 脉冲重复频率 θ3dB :3dB波束宽度(deg) ω :天线扫描速率(deg/s)
38
PPI扫描的数据样本
39
40
10
距离库间平均处理
41
42
分辨率为0.13nm的基本谱宽
43
分辨率为0.27nm的基本谱宽
Pr
=
π3
1024(ln
2)
Pt G 2θϕh λ2
K r2
2
Z
令雷达常数
:
C
=
π 3PtG2θϕh
1024(ln 2)λ2
K
2
Pr
=
c r2
Z
22
•dBZ=10lgZ/Z0
•Z0=1mm6/m3
24
6
Z = Pr r 2 c
25
dBZ = 20 lg R + dB − 10 lg C Pmin
dBZ = 20lg R + dB − A