LS-DYNA显式时间步长与沙漏控制
利用LS-DYNA进行成形仿真的输入控制参数
利用LS-DYNA进行成形仿真的输入控制参数Translated by SunnyWinterLS-DYNA已广泛用于汽车碰撞分析。
默认的输入参数一般能给出有效,精确的碰撞模拟结果。
但是,这些默认值对于成形仿真分析并不一定理想。
下面是一个标准的金属成形过程。
为及时参考,推荐输入参数用黑体字标识,并包含在盒状关键字输入框中。
模型明确要求的数据,如终止时间等参数,输入黑体的0值。
一般问题设定在显式成形仿真中,利用质量比例缩放和(或者)人为的高工具速度,运行时间可以大大缩减。
这两种方法都会引入人为的动力学影响,因此必须将其减小到在工程意义上合理的水平。
一个单独的描述人为动力影响的参数是:工具每运动1毫米所采用的显式时间步进值(或周期)数目。
当成形过程允许大的无限的板料运动,比如冲击成形,需要更多的毫米周期数。
当板料被压边圈和冲模支撑较强的约束住时,较少的毫米周期数是必要的。
对大多数的仿真来说,100到1000之间的毫米周期数能产生合理的结果。
如果可能,或者有必要重复一个仿真,可利用两个不同的毫米周期值并比较分析结果去估计其对人为动力学影响的敏感性。
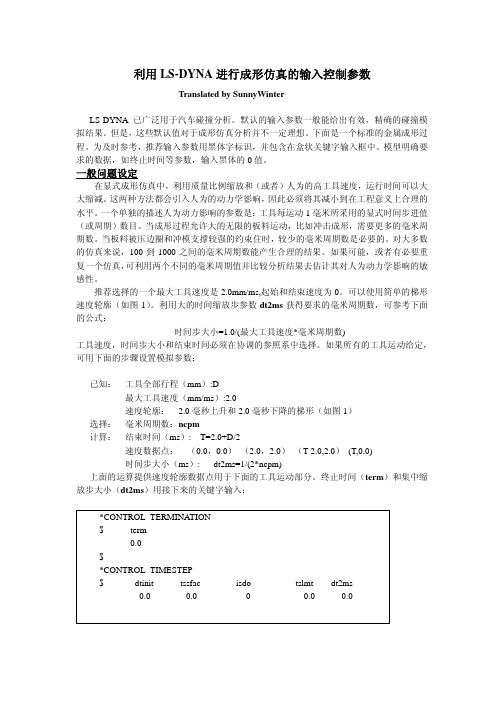
推荐选择的一个最大工具速度是2.0mm/ms,起始和结束速度为0。
可以使用简单的梯形速度轮廓(如图1)。
利用大的时间缩放步参数dt2ms获得要求的毫米周期数,可参考下面的公式:时间步大小=1.0/(最大工具速度*毫米周期数)工具速度,时间步大小和结束时间必须在协调的参照系中选择。
如果所有的工具运动给定,可用下面的步骤设置模拟参数:已知:工具全部行程(mm):D最大工具速度(mm/ms):2.0速度轮廓: 2.0毫秒上升和2.0毫秒下降的梯形(如图1)选择:毫米周期数:ncpm计算:结束时间(ms): T=2.0+D/2速度数据点:(0.0,0.0)(2.0,2.0)(T-2.0,2.0) (T,0.0)时间步大小(ms): dt2ms=1/(2*ncpm)上面的运算提供速度轮廓数据点用于下面的工具运动部分。
ansys-lsdyna知识

一、关于dyna中材料失效准则的定义有些材料类型中有关于失效准则的定义,但是也有些材料类型没有失效准则的材料类型,这时需要额外的失效准则定义,与材料参数一块定义材料特性。
需要用到*mat_add_erosion关键字,对于这个关键字有几个需要注意的地方。
1、材料的通用性破坏准则:`材料通常为拉破坏或者剪切破坏,静水压是以压为正,拉为负,所以静水压破坏就是给出最小的承受压力,当然需要小于0(即拉力),如果静水压小于该值,则材料破坏。
相反,应力则是以压为负,拉为正,故最大主应力或最大等效应力或最大剪应力破坏等等都是给出最大的应力极限,当然大于0,如果拉应力大于该值,则材料破坏,无论是*MAT_ADD_EROSION,还是材料内部自带的破坏准则还是其他软件,都遵循以上准则。
注意:屈服不是失效。
2、单元失效模拟的功能与目的单元删除功能是为了克服有限元本身的缺陷而提出的一项方法,由于有限元本身是基于连续介质力学的,而在连续介质力学中,所研究的物体需要是连续的,既物质域在空间中连续。
在这样的理论假设框架下,单元本身是不会消失的。
然而在实际情况下,由于损伤断裂的存在,势必会使得一些单元消失或者完全的失效,所以为了能够模拟这种情况,DYNA 提供了单元失效功能。
破坏、失效、断裂,都是工程性的概念,它表示在达到某一准则后,结构、构件、或者构件中的某一部分,从结构中退出工作,不再影响整体结构的受力。
而从有限元概念上说,对上述机制的模拟,基本手段都是一样的,就是当满足某一指标(比如某个应变大小)后,将一个单元或者一个积分点的质量、刚度和应力、应变都设为零(或者非常接近与零),这样它在整体结构计算中就不再发挥作用,进而实现了退出工作机制的模拟。
所以,无论是把纤维模型中的某个纤维、或者分层壳模型中的某一层、或者实体模型中的某个积分点,或者结构中的某个单元,让其不再参与整体结构计算,都可以达到模拟破坏退出工作的目的。
而所谓单元生死技术,是上述基本概念在有限元程序中的一个“打包”应用。
LS-DYNA 中沙漏控制 (Hourglass)
09.11.2015
*HOURGLASS
• HGID: 沙漏 ID; • IHQ: 沙漏控制类型;
• • • • • • •
类型1,2,3 是基于粘性的沙漏控制; 类型4,5,6 是基于刚性的沙漏控制;对于TYPE 1的体单元,TYPE 13/15的壳单元(缩 减积分的2D单元),使用TYPE 6的HG + 系数1.0,就可以在厚度方向仅划分1层的体单 元(TYPE 1)上获得正确的弯曲刚度。 类型8 只用于单元类型为16的壳单元;它激活了TYPE16壳单元的翘曲刚度,因此这 种壳单元的翘曲不会造成求解的退化。在这种沙漏控制下,TYPE16的壳单元可以用 来求解扭曲梁的问题(twisted beam). 类型9 适用于3D 六面体元素单元。 QM: 沙漏系数;Hourglass coefficient; 默认值0.1,如果在*CONTROL_HOURGLASS 中QH被定义了非零值,此系数则被QH替 代。 IBQ: 体积粘度类型;Bulk viscosity type; Q1: Quadratic bulk viscosity coefficient; Q2: Linear bulk viscosity coefficient; QB: Hourglass coefficient for shell bending, default QB=QM; VDC: Viscous damping coefficient for type 6, 7 hourglass control: QW: Hourglass coefficient for shell warping, default QB=QW
09.11.2015
09.11.2015
*HOURGLASS - IHQ 沙漏控制类型 01 0:默认1,不考虑命令行 *CONTROL_HOURGLASS; 1:LS-DYNA 标准粘性方式;在材料不是特别软,或者单元有合理的形状,且网格不是太粗
ansys-lsdyna知识
一、关于dyna中材料失效准则的定义有些材料类型中有关于失效准则的定义,但是也有些材料类型没有失效准则的材料类型,这时需要额外的失效准则定义,与材料参数一块定义材料特性。
需要用到 *mat_add_erosion关键字,对于这个关键字有几个需要注意的地方。
1、材料的通用性破坏准则:`材料通常为拉破坏或者剪切破坏,静水压是以压为正,拉为负,所以静水压破坏就是给出最小的承受压力,当然需要小于0(即拉力),如果静水压小于该值,则材料破坏。
相反,应力则是以压为负,拉为正,故最大主应力或最大等效应力或最大剪应力破坏等等都是给出最大的应力极限,当然大于0,如果拉应力大于该值,则材料破坏,无论是 *MAT_ADD_EROSION,还是材料内部自带的破坏准则还是其他软件,都遵循以上准则。
注意:屈服不是失效。
2、单元失效模拟的功能与目的单元删除功能是为了克服有限元本身的缺陷而提出的一项方法,由于有限元本身是基于连续介质力学的,而在连续介质力学中,所研究的物体需要是连续的,既物质域在空间中连续。
在这样的理论假设框架下,单元本身是不会消失的。
然而在实际情况下,由于损伤断裂的存在,势必会使得一些单元消失或者完全的失效,所以为了能够模拟这种情况,DYNA 提供了单元失效功能。
破坏、失效、断裂,都是工程性的概念,它表示在达到某一准则后,结构、构件、或者构件中的某一部分,从结构中退出工作,不再影响整体结构的受力。
而从有限元概念上说,对上述机制的模拟,基本手段都是一样的,就是当满足某一指标(比如某个应变大小)后,将一个单元或者一个积分点的质量、刚度和应力、应变都设为零(或者非常接近与零),这样它在整体结构计算中就不再发挥作用,进而实现了退出工作机制的模拟。
所以,无论是把纤维模型中的某个纤维、或者分层壳模型中的某一层、或者实体模型中的某个积分点,或者结构中的某个单元,让其不再参与整体结构计算,都可以达到模拟破坏退出工作的目的。
而所谓单元生死技术,是上述基本概念在有限元程序中的一个“打包”应用。
关于lsdyna求解控制
关于求解控制——很多时候,在显式分析中要说明的求解控制参数与隐式分析中的控制参数非常相似。
——显式求解中要说明的基本参数:1:TIME代表实际的物理时间。
实际求解时间应该很短,通常为毫秒级。
solution : time controls>solution time2: EDINT 积分点数(对)。
壳单元需要至少3-5 个积分点,这样才能捕捉到塑性效应。
solution : output control:Integ Pt Storage …3: EDRST,EDHTIM将时间步结果写入到.rst和.his文件的个数。
.rst文件记录了整个模型的结果,可供通用后处理器使用,一般典型的输出步数为10-100个(缺省为100)。
.his 文件记录了模型的一个子组的结果,可供时间历史后处理器使用。
一般输出步数为 1 000- 1 000000(缺省为1000)――除写出.his和.rst二进制结果文件以外,还可以用EDOPT命令确定写出结果文件d3plot 和d3thdt 。
――用户还可以输出一系列包含特定信息的ASCII文件:GLSTA■全局模型数据,BNDOU边界条件力与能量,RWFOF刚性墙力,DEFOR离散单元力,MATSU材料能量,NCFOR节点界面力,RCFOR界面反作用力,DEFGE变形几何数据,SPCFORC 单点约束力,SWFOF节点约束反力(点焊),RBDOU刚体数据,GCEOU 几何接触实体,SLEOU滑移面能量,JNTFOR节点数据,ELOU■单元数据。
――使用三种高级求解控制选项:1, CPC控制:说明CPU限制。
2,质量缩放:调整单元质量,增加时间步长。
3,子循环:调整模型以减少CPU时间(不推荐)。
――通过调整每个单元的密度,质量缩放(根据单元的大小调整任何单元的密度)从而对每个单元调整合适的时间步。
――初始的时间步长与最小的单元有关,使用质量缩放初始时间步长加长,CPU计算时间减少68%,具有质量误差,质心坐标也会发生变化。
汽车碰撞分析LS_DYNA控制卡片设置

控制卡片参数说明
*CONTROL_TIMESTEP(时间步长控制卡片) $ DTINIT TSSFAC ISDO TSLIMT DT2MS LCTM ERODE MSIST 0.0 0.9 2 0.0 -0.001 0 1 1 $ DT2MSF DT2MSLC 计算所需时间步长时,要检查所有的单元。出于稳定性原因,用0.9(缺省)来 减小时间步:Δt = 0.9 l/c ,特征长度l,和波的传播速度c,都与单元的类型有关。 DTINIT:初始时间步长,如为0.0,由DYNA自行决定初始步长; TSSFAC:时间步长缩放系数,用于确定新的时间步长。默认为0.9,当计算不稳定时,可以减小该值,但同时 增加计算时间; ISDO:计算4节点壳单元时间步长的(不同的值对应特征长度的不同算法,推荐使用2,因为此选项可以获得 最大的时间步长,但有三角形单元存在时会导致计算不稳定); TSLIMT:壳单元最小时间步分配 ,使单元的时间步长控制在最小时间步长之上;只适用于使用 *mat_plastic_kinematic,*mat_power_law_plasticity*mat_strain_rate_dependent_plasticity,*mat_piecewise_linear_pla sticity等材料模型的壳单元,不建议使用该选项,因为使用DT2MS选项更好。 DT2MS:因质量缩放计算得到的时间步长。当设置为一个负值时,初始时间将不会小于TSSFAC*|DT2MS|。质 量只是增加到时间步小于TSSAFC*|DT2MS|的单元上。当质量缩放可接受时,推荐用这种方法。用这种方法时 质量增加是有限的,过多的增加质量会导致计算终止。当设置为正值时,初始时间步长不会小于DT2MS。单 元质量会增件或者减小以保证每一个单元的时间步都一样。这种方法尽管不会因为过多增加质量而导致计算终 止,但更难以作出合理的解释。默认为0.0,不进行质量缩放; LCTM:限制最大时间步长的Load-curve,该曲线定义最大允许时间步长和时间的关系(可选择) ; ERODE:当计算时间步长小于TSMIN(最小时间步长)时体单元和t-shell被自动删除。
LS_DYNA用户使用手册(中)
8-3
ANSYS/LS-DYNA 用户使用手册
第九章 沙漏
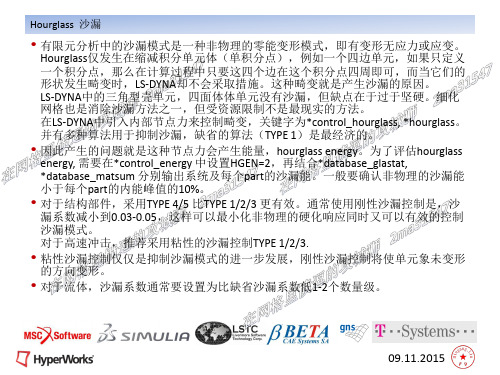
尽管 ANSYS/LS-DYNA 中所有使用的单个积分点实体单元和壳单元在大变形中很可靠,并且能节 约大量计算机时,但它们容易形成零能模式。该模式主要指沙漏模式,产生一种自然振荡并且比所 有结构响应的同期要短得多(数学形态,物理上不可能)。沙漏变形没有刚度并产生锯齿形外形(如 图示)称为沙漏变形。分析中沙漏变形的出现将使结果不正确,应尽量避免。
8.1 定义惯性特性
缺省时,程序将计算每个刚体的惯性特性。但是,用户可能会发现给刚性体设定重力、质量、
初始速度(在整体或局部坐标系)的特定中心和特定惯性张量是很有用的,而不是依赖于求解过程
中由有限元模型计算得到的值。可以用 EDIPART 来定义刚性体的任意特征,命令格式如下: 其中:PART-定义惯性的 part ID
9-1
ANSYS/LS-DYNA 用户使用手册
性系数。(缺省的沙漏系数和体积粘性已足够。)使用该方法时,沙漏控制只施加于给定的材料而并 非整个模型。这就可以在模型的危险区域内进行沙漏控制却不改变整个模型的刚度特性。
当显式动态分析使用缩减积分单元时,应判断沙漏是否会显著的影响结果。一般准则是,沙漏 能量不能超过内能的 10%,沙漏能量和内能的对比可在 ASCⅡ文件 GLSTAT 和 MATSDM 中看出也可在 POST20 中画出。为确保这些文件中记录沙漏能量结果, EDENERGY 中的 HGEN 域须设为 1。
edmp,rigid
定义刚性体
edpart,create
生成 part 列表
!定义所需矩阵
*dim,coord2,,3 *dim,velo2,,6 *dim,inert2,,6 !
LS-DYNA显式时间步长与沙漏控制共51页文档
压力分布(more on that later)
SINGLE SURFACE CONTACT
• 处理self_contact(曲面)以及part-to-part的接 触
• 仅需定义从面,无需定义主面(主面假定为和从 面一样)
(或者是用双精度计算)
运行时间的一些说明
• 仿真分析运行的时间决定于:
– 问题的分析时间 – 时步大小(材料性质,单元大小)
LS-DYNA使用所有单元时步的最小时步 – 单元的数目/单元公式 – 接触类型(通常影响不大) – 附加计算选项的设置(如:二阶应力更新,沙漏能的计算,沙漏
控制的类型等) – 计算机的速度/CPU的数目
– BODY:基于刚体位移的终止 – NODE:基于节点坐标值的终止 – CONTACT:基于零接触力的终止
单向接触类型
• *CONTACT_...
– NODES_TO_SURFACE – ONE_WAY_SURFACE_TO_SURFACE
– AUTOMATIC_NODES_TO_SURFACE – ONE_WAY_AUTOMATIC_NODES_TO_SURFACE
• 有时使用隐式分析是一种高效的方法
终止控制
• *CONTROL_TERMINATION
– 指定时间或循环(时间步)终止 – 当时步=初始时间步长的某个小数时终止 – 能量变化达到某个百分数时终止 – 质量变化(仅用于使用质量缩放的求解)达到某个百分
数时的终止
• *TERMINATION_<option>
• CPU用时的估计
– 估计的CPU用时可以通过发送开关命令(sw2)得到 假定时间步长保持不变
LS-DYNA常见问题及解决策略 (2012年11月7日)
沙漏的产生
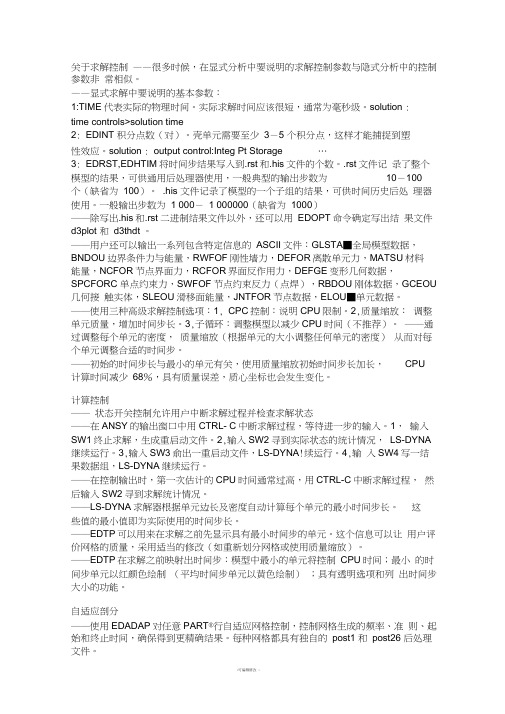
沙漏的零能模式
在原始、受剪和受弯状态下,单元积分点上的主应力和剪应力状况都 没有发生变化,也就是说该单元可以自由地在这三种形态之间转变而 无需外力。 因此,很小的扰动理论上可以让单元无限地变形下去,而不会消耗任 何能量。
单元原始状态
2011/11/9
单元受剪后应该的状态
单元受弯后应该的状态
9
体育器材 2011/11/9
10
湖南大学 汽车车身先进设计制造国家重点实验室
LS‐DYNA基础 LS‐DYNA基本分析流程
几何模型修正 几何模型读取
湖南大学 汽车车身先进设计制造国家重点实验室
LS‐DYNA基础
前处理软件
FEMB LS‐PREPOST HYPERMESH ANSYS PATRAN FEMAP
2011/11/9
汽车工业:碰撞分析、气囊设计 、约束系统匹配、部件加工 航空航天:鸟撞、飞机结构冲击动力分析、 碰撞,坠毁、冲 击爆炸及动态载荷、火箭级间分离模拟分析、宇宙垃圾碰撞、 特种复合材料设计 制造业:冲压、锻造、铸造、切割 建筑业:地震安全、混凝土结构、爆破拆除、公路桥梁设计 国防工业:内弹道和终点弹道、装甲和反装甲系统、穿甲弹 与破甲弹设计、战斗部结构设计、空气,水与土壤中爆炸 电子领域:跌落分析、包装设计、热分析、电子封装 生物医学
2011/11/9
沙漏的控制
当显式动态分析使用缩减积分单元时,应判断 沙漏是否会显著的影响结果。 沙漏能量不能超过内能的5‐10%。 沙漏能量和内能的对比可在ASCⅡ文件GLSTAT 和MATSDM *database_glstat输出系统沙漏能 *database_matsum输出各部件沙漏能 需要提前在*control_energy卡片中设置HGEN =2
LS_DYNA用户使用手册(中)
另外,可以用 EDCRB 命令把两个刚体结合在一起,它们的作用如同一个刚性体。但与刚性体 的定义不同的是,它主要依据材料号,根据 PARTID 定义的刚体约束和一个约束方程号。因此,为 了在两个物体间施加刚体约束,必须执行命令 EDCRB, ADD, NEQN, PARTS,NEQN 为约束方程参 考编号,PARTM 是主刚体 part 号,PARTS 是从刚体 part 号。必须注意不能用同一个 NEQN 值执行多 个 EDCRB 命令,仅使用最后一个 NEQN 值。当使用 EDCRB 命令时,第二个刚性体将被第一个刚 性体吸收,因而此后对第二个刚性体的任何操作将无效.
8.1 定义惯性特性
缺省时,程序将计算每个刚体的惯性特性。但是,用户可能会发现给刚性体设定重力、质量、
初始速度(在整体或局部坐标系)的特定中心和特定惯性张量是很有用的,而不是依赖于求解过程
中由有限元模型计算得到的值。可以用 EDIPART 来定义刚性体的任意特征,命令格式如下: 其中:PART-定义惯性的 part ID
8.3 变形体和刚性体部件间的转换
在一些动力学应用中,如果模型中大部分单元都是可变形的,那么,持续时间较长的刚体运动 的计算量就会极为庞大。摩托车轮子就是这样一个例子,轮子翻滚持续较长时间相对于后来的撞击 会占用更多的 CPU。为了提高这种应用的计算效率,ANSYS/LS-DYNA 提供了这样一种转换性能, 它把某些材料从变形状态换至刚性状态,然后转到变形状态,通过刚体运动过程中转换变形体为刚 性体,可以节省大量的 CPU 时间。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
粘性接触阻尼
• 通过*contact关键字中VDC参数来指定
• 抑制垂直与接触表面的振荡
• VDC=临界阻尼(2mω )的百分数
– 20%的阻尼=20,而不是0.2
• 界面固有频率的计算使用下面的参数
– 刚度 K=interface stiffness
– 质量 m=min mslave ,mmaster
• L/c表示一个弹性应力波传过这个单元的时间 • 时步和最高的频率成反比
– ω=sqrt(k/m) – 例如:梁单元的轴向模态 k=EA/L; m=ρAL ω=sqrt(EA/ρAL^2)= sqrt(E/ρ)/L=c/L
材料声速
• 高密度高刚度材料有高的声速
材料 STEEL ALUMINUM TITANIUM PLEXIGLASS WATER AIR 声速(m/s) 5240 5328 5220 2598 1478 331
accelerations at tn
velocities at tn+1/2
un+1=un+ Vn+1/2 Δtn+1/2 displacements at un+1
显式时步计算
• 时间步长=tssf*L/c
– Tssf=时间步长缩放因子(default=0.9) – L=单元的特征长度 – C=材料的声速
– SURFACE_SURFACE – AUTOMATIC_SURFACE_SURFACE – SINGLE_SURFACE – ONE_WAY_SURFACE_TO_SURFACE – AUTOMATIC_ONE_WAY_SURFACE_TO_SURFACE – AUTOMATIC_SINGLE_SURFACE – AIRBAG_SINGLE_SURFACE – ERODING_SURFACE_SURFACE – ERODING_SURFACE_SURFACE
• 提供一种在选定位置记录接触力的方便的方法
• 只要指定从面 • 卡片2和3是空的 • 力传感器不产生接触力
– 单元删除是根据材料失效准则删除的,而不是因为eroding contact
• *CONTACT_FORCE_TRANSDUCER的两个选项
– _PENALTY(测量基于惩罚的接触力)
– _CONSTRAINT(测量基于约束的接触力)
基于面段的接触(SOFT=2)
每一个块用一 个块单元来定 义,节点不和 接触面段产生 接触
Falling Blocks using Segment-Based Contact
CONTACT_INTERIOR
• 有时用来阻止发生严重变形的泡沫单元产生负体积
• 输入包括
– Part set ID – 惩罚因子 – 压垮激活因子(fraction of initial thickness)
– 借助于ECDT参数(*CONTROL_CONTACT)可以取消eroding contact对时间步长的影响
• 因为单元删除后,从节点将变为自由节点,这些节点可以 在接触中继续考虑(质量守恒)
– 自由节点是否删除由*CONTROL_CONTACT中的ENMASS参数控 制
Eroding Contact
– AUTOMATIC_GENERAL_INTERIOR
SINGLE SURFACE CONTACT
• AUTOMATIC_SINGLE_SURFACE是碰撞模拟中应用最多 的接触
• AUTOMATIC_GENERAL能够很好的处理壳的边-边接触
和梁-梁接触
– 计算比AUTOMATIC_SINGLE_SURFACE慢许多
– 问题的分析时间 – 时步大小(材料性质,单元大小) LS-DYNA使用所有单元时步的最小时步 – 单元的数目/单元公式 – 接触类型(通常影响不大) – 附加计算选项的设置(如:二阶应力更新,沙漏能的计算,沙漏 控制的类型等) – 计算机的速度/CPU的数目
• CPU用时的估计
– 估计的CPU用时可以通过发送开关命令(sw2)得到 假定时间步长保持不变
特征长度L
• 体单元或厚壳单元
– L=volume/areamax side
• 壳单元
– L=area/lengthmax edge (Default) – L=area/lengthdiagonal – L=area/lengthmin side
• 梁单元
– L=beam length
显式时间步长的计算
• 970以前的版本不能用MPP
基于面段的接触(SOFT=2)
基于面段的接触(SOFT=2)
因为检测的是面段与面段之 间的穿透,而不是节点和面 段之间的穿透
如果模型的几何形状带有尖 角或边沿,基于面段的选择 是一个很好的选择
即使节点没有穿透但面段仍有撞击
基于面段的接触(SOFT=2)
• Segment-Based Contact is implemented for:
2D Contact
• *CONTACT_2D_<option>
– 用于处理轴对称和平面应变单元中的接触 壳公式12-15 梁公式7,8 – CONTACT_2D_AUTOMATIC_...在显式仿真中优先使用 – 非自动接触CONTACT_2D...通常用在隐式仿真分析中
力传感器
*CONTACT_FORCE_TRANSDUCER_option
LS-DYNA
显式时间步长与沙漏控制
显式时间积分
• 基于时间积分的中心差分法 • 时刻tn的运动方程(无阻尼) Man=Pn-Fn+Hn M-对角质量阵 P-外部载荷+体力 F-内力(stress divergence vector) H-沙漏阻力
显式时间积分
an=(Pn-Fn+Hn)/ M
Vn+1/2=Vn-1/2+anΔtn
• 离散的弹簧
– 和长度无关(刚度直接给定) – 和节点质量和弹簧刚度有关系
• 时步缩放因子(tssf)
– 本质上来说,安全因子是确保计算的稳定 – 默认是0.9(爆炸模型取0.67) – 如果计算不稳定或结果有疑问,可减小到0.8或更小 (或者是用双精度计算)
运行时间的一些说明
• 仿真分析运行的时间决定于:
• 处理self_contact(曲面)以及part-to-part的接
触
• 仅需定义从面,无需定义主面(主面假定为和从
面一样)
– 使用two-way treatment
• 总是考虑壳的偏置厚度
• 没有数据写到RCFORC输出文件中。
– 必须设置力传感器 *CONTACT_FORCE_TRANSDUCER_PENALTY来输出接触力
• 有时使用隐式分析是一种高效的方法
终止控制
• *CONTROL_TERMINATION
– – – – 指定时间或循环(时间步)终止 当时步=初始时间步长的某个小数时终止 能量变化达到某个百分数时终止 质量变化(仅用于使用质量缩放的求解)达到某个百分 数时的终止
• *TERMINATION_<option>
基于面段的接触(SOFT=2)
• 忽略初始穿透
– 有初始穿透的节点在分析开始的时候不被移动
– 面段的初始穿透量会被存储起来,在计算接触力的时候,要从当 前的穿透量中减去初始的穿透量作为接触力计算的穿透量
– 这种方法一直贯穿在整个分析中,因此,如果一个在开始计算时
未被检测到的穿透节点在第一次检测到穿透时不会因为很大的接 触力而产生巨大的速度
– 所谓的“shooting node logic” 参数SNLOG对此接触没有影响
– 当参数IGNORE设置成1时对SOFT=0或1的初始穿透会作同样的处 理
基于面段的接触(SOFT=2)
• SOFT=2接触增加的选项
– SBOPT在可选的卡片A中
2(默认):假定为平面面段 3:可考虑面段的翘曲
4:滑移选项
5:使用选项3和4 – DEPTH在可选的卡片A中
2(默认):检查面段穿透
3:同2,但穿透深度同时在面段边缘检查 5:同2,同时增加边-边穿透的检查
基于面段的接触(SOFT=2)
Falling Balls using Segment-Based Contact
基于面段的接触(SOFT=2)
ONE_WAY_SURFACE_TO_SURFACE
• 类似于NODES_TO_SURFACE CONTACT,除了„
– 从面是面段的集合而不是节点集 – 借助于”INTFOR“二进制数据库文件可以显示出从面的
压力分布(more on that later)
SINGLE SURFACE CONTACT
• 对光滑接触力的噪声影响很有用。如一个part夹在其它两 个part之间,其接触力有时会出现明显的噪声
相关的关键字卡片
• *DATABASE_option
– ASCII 输出文件
GLSTAT:整体的统计数据 RCFORC:合成的接触力
SLEOUT:接触能量
NCFORC:在每一个节点的接触力(设置*contact打印标识SPR=1 和MPR=1) – Binary 输出文件 *DATABASE_BINARY_INTFOR-接触力和应力
• AIRBAG_SINGLE_SURFACE用于折叠的气囊展开
Eroding Contact
• 处于自由面的单元被删除后接触面会自动更新
– 单元删除是根据材料失效准则删除的,而不是因为eroding contact
• 时间步长自动的调整以满足接触时间步长
– Eroding contact通常用在高速仿真中
• 970版本中有用于对大剪切变形作改进处理的选项
(TYPE=2)