全站仪后方交会标准差算法 -回复
大数据时代测边后方交汇的计算公式及精度分析
大数据时代测边后方交汇的计算公式及精度分析摘要在图根控制测量中,交会定点是一种常用、简单的加密平面控制点的方法。
目前,随着全站仪的广泛使用,除了可以采用传统的测角交会方法外,测边交会加密平面控制点方法的运用越来越普遍。
但现在关于测边交会定点的计算主要是采用间接计算公式,公式推导不仅复杂,而且计算不易掌握。
基于此,本文就针对测边后方交汇的计算公式及精度进行分析研究。
关键词测边后方交汇;计算公式;精度分析前言由于测边后方交会定点具有布点灵活、施测方便、无须已知点之间互相通视且计算简便等优点,尤其在全站仪已普及应用的情况下,优点更为明显。
随着电子技术和计算机技术的发展,全站仪的测角和测距性能得到了很大程度的提高。
很多全站仪的测量、记录、数据预处理、显示等多种模块都向着智能化、集成化的方向发展,这样就大大减少了测设过程中的误差来源,提高了测量数据的精度。
1 测边后方交会定点的计算公式在实际的生产过程中,常常因工期紧,任务重,各项工作交叉进展,导致原有的测量控制点遭到不同程度的破坏,给施工测量工作带来了很大的困难。
例如两控制点不通视,在设备安装时某些部件上的控制点上只能放棱镜而不适宜架设仪器等情况。
以往为了解决工程测量中出现的这些问题,常用极坐标法、直角坐标法、无定向导线法等测设方法来确定加密点,这些方法不但工作量大,而且加密点往往达不到原有控制点的精度[1]。
而传统的后方交会方法是通过在加密点上观测3个已知方向的水平夹角来计算测站的平面坐标,它要求加密点不能位于由3个已知点构成的危险圆附近。
由于这些条件在城市工程测量中较难满足而限制了传统后方交会方法的使用。
为此,本文提出了测边后方交会方法。
它是通过在加密点P上安置全站仪,在已知点A、B上安置反射镜,通过测量水平距离P A、PB和水平角V,计算测站点的平面坐标。
与传统后方交会方法比较,测边后方交会只需要在加密点上观测附近任意两个已知点的水平距离和水平角就可以计算出测站点的坐标。
徕卡TS60全站仪操作说明书V1.3

徕卡TS60全站仪操作说明书2016年6月26日For Leica Captivate v1.3角度测量测角精度1Hz, V 0.5"(0.15mgon)原理测角方式绝对编码,连续,四重轴系补偿距离测量(棱镜)范围2棱镜(GPR1,GPH1P )31.5m ~3500 m 测距精度单次2,5/连续2,50.6mm + 1ppm /3mm+1.5ppm 测量时间单次2,5/连续2,5典型2.4秒/典型0.15秒距离测量(长测程模式)范围2长测程模式2,4,512000m 距离测量(无棱镜)范围2无棱镜(任意表面)41.5米至>1000m 精度/测量时间单次(任意表面)2,4,5,62mm + 2ppm / 典型3s激光光斑大小50m 处8mm x 20mm 测距技术基于相位原理系统分析技术同轴红色可见光徕卡TS60超高精度全站仪技术参数1.标准差,依据ISO17123‐32.阴天,无雾霾,能见度40KM ,无热流闪烁3.1.5m 至2000m ,使用360度棱镜(GRZ4,GRZ122)4.测量目标处于阴影下,阴天,柯达灰白板(90%反射率)5.标准差,依据ISO17123‐46.距离>500m :精度4mm+2ppm,测量时间典型6秒徕卡TS60超高精度全站仪技术参数驱动驱动方式压电陶瓷驱动技术不需任何齿轮,仪器损耗小,更经久耐用电能直接转换为机械能,不产生磁场也不会被磁场干扰。
在测量以及瞄准过程中镜头不会抖动,保证测量精度。
通过控制热量的产生以及消散从而保证TS60的最高测距精度转速转速180°(200gon )/ s 倒镜时间2.9s 自动目标识别(ATR plus )ATR 2模式及工作范围可自动找目标测量圆棱镜(GPR1,GPH1P)1500m 360°棱镜(GRZ4, GRZ122)1000m LOCK 2模式及工作范围适用于动态实时跟踪监测目标圆棱镜(GPR1,GPH1P)1000m 360°棱镜(GRZ4, GRZ122)1000m 精度1,2/测量时间ATRplus 测角精度(Hz ,V)0.5″(0.15mgon)测量时间(GPR1)典型3 –4s 超级搜索PS (Power Search)测程360°棱镜(GRZ4, GRZ122)300米搜索时间一般典型5秒徕卡TS60超高精度全站仪技术参数图像广角相机和望远镜相机传感器500万像素CMOS传感器视场(广角相机/望远镜相机)19.4°/1.5°帧频率高达20帧每秒导向光(EGL)工作范围/精度5‐150m/典型5cm,100m处综合数据自动对焦望远镜放大倍数/ 调焦范围30x / 1.7m至无穷远机载软件系统Captivate软件(含应用程序)接口RS232,USB,Bluetooth®,wlan处理器TI OMAP4430 1GHZ 双核ARM®CortexTM‐A9 MPCoreTM操作系统‐Windows EC7键盘和显示屏显示/ 键盘WVGA, 5英寸,彩色触摸屏, 双面/ 37键,带屏幕,键盘照明数据存储内存2G存储卡SD卡可配1G或8G/U盘徕卡TS60超高精度全站仪技术参数操作微动螺旋3个无限位微动螺旋,一个伺服对焦驱动,两个自动对焦按键,可进行单手或双手操作自定义键√智能电源管理内置电池(GEB242)可更换锂电池,具备直接给机身电池充电功能操作时间/ 电池容量7‐9h / 5.8Ah 重量包括电池7.7kg 环境指标工作温度‐20℃至+50℃(‐4°F 至+122°F)防尘/防水(IEC 60529)/防雨IP65 /MIL ‐STD ‐810G,方法506.5‐I防潮IP65 / 95%, 无冷凝目录一、操作面板/图标介绍二、测前准备三、设站定向四、测量五、放样六、数据批量导入导出七、GeoCOM联机测量设置八、仪器四重轴系误差检校九、其他设置1.开机:按住2 s 打开。
全站仪后方交会法步骤和高程测量步骤

1、角度测量(angleobservation)?(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠AOB,则:1)当精度要求不高时:瞄准A点——置零(0SET)——瞄准B点,记下水平度盘HR的大小。
2)当精度要求高时:——可用测回法(methodofobservationset)。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(HSET)。
2、距离测量(distancemeasurement)?PSM、PPM的设置——测距、测坐标、放样前。
1)棱镜常数(PSM)的设置。
一般:PRISM=0(原配棱镜),-30mm(国产棱镜)2)大气改正数(PPM)(乘常数)的设置。
输入测量时的气温(TEMP)、气压(PRESS),或经计算后,输入PPM的值。
(1)功能:可测量平距HD、高差VD和斜距SD(全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”(MEAS)。
3、坐标测量(coordinatemeasurement)?(1)功能:可测量目标点的三维坐标(X,Y,H)。
(2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。
若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:?坐标:?若输入:测站S高程,测得:仪器高i,棱镜高v,平距,竖直角,则有:高程:?(3)方法:?输入测站S(X,Y,H),仪器高i,棱镜高v——瞄准后视点B,将水平度盘读数设置为——瞄准目标棱镜点T,按“测量”,即可显示点T的三维坐标。
4、点位放样(Layout)?(1)功能:根据设计的待放样点P的坐标,在实地标出P点的平面位置及填挖高度。
全站仪高程及后方交会法要点

观测时设站和定向只做一次,数据采集可根据实地点数目任意进行。
பைடு நூலகம்
瞄准后视控制点,直接输入后视点坐标或选择一个存于机内的坐标点
你在建站的时候输入站点高程和后视点高程,测量时再输入棱镜高,则测量时就直接是高程了,但全站仪测出来的高程精度不高 ,不建议采用!
拓普康
3.数据采集:
瞄准目标并测量之,输入毡标高(有的叫凌镜高)。
经过这些步骤待测点的坐标和高程就测回来了。具体操作要按仪器提示进行(每一步可能是一个菜单选项,注意要按“确定“或“OK”)
“待测点高度仪器读数0.5m”不知是不是指待测点与设站点之间的高差。
假设设站点A,待测点B,则HA+h=HB+i(棱镜高)-d高差
即实际高度是:HA+h-i+d高差=1.43+0.5-1.2=0.73M
其中HA+h是指视线高,即你所说的仪器高度1.43m。
不过我还是对你的描述有些不解!
方法一:
架设C为已知高程点Hc,B为未知高程点,高程记为Hb
将全站仪架设在C点精确对中整平,用钢卷尺量取仪器高度记为i,在B点架设棱镜精确对中整平,量取棱镜高度记为v,用全站仪望远镜精确照准棱镜中心,按下测距按键,得出AB水平距离D,读出竖盘读数A,则可得到B点高程:Hb=Hc+DTanA+i-v
2.定向,将全站仪望远镜瞄准另一已知高程点B,输入B点所有已知数据后,按确认键完成。
(如果仅已知高程,那就把其他需要输入的项全部架设,棱镜高必须用卷尺量取,并真实输入)
3.照准其他任何你想要测量高程的点按测量键,仪器就会显示该待测点的坐标和高程(如果前面建站和定向都用的假设坐标,此处得到的坐标当然也是假定的,但是高程是完全正确的)
全站仪测量高程到底有几种方法

全站仪测量高程到底有几种方法。
方法一:经典方法,全站仪在已知坐标(含高程)点上设站;方法二:后方交会,全站仪在任意点上设站;方法三:对边测量,全站仪测两点高差。
下面对三种方法进行阐述:方法一:经典方法先说方法一。
说这个方法是经典方法,是因为:1.其测量原理我们在学习经纬仪视距测量时就学习过,每种测量教材中都有;2.测量教材中有关全站仪高程测量原理,都按此原理进行阐述;3.全站仪高程测量的相关设置,都按此原理进行的。
到底什么测量原理呢,我们来回顾一下,看下图:我们从(1)式中可以发现,全站仪一旦设站完成,测站高程和仪器高度均为定值,若测量过程中不改变棱镜高度,则除了Ssina(即实测参数)外,等式右侧其它各参数之和均为恒等值,由此我们可以得出:全站仪一旦设定,同时不再改变棱镜高度的话,全站仪对各点的测量高差,其实质是每个三角高差dZ的差值这个结论我们先记住,它将是后面方法二和方法三的理论基础。
方法二:后方交会说实话,我也不知道叫“后方交会”是否准确,因为这个名字一般是指:在全站仪平面测量时,全站仪自由设站,通过测量并输入测站外两个已知点的平面坐标,从而完成设站的工作。
而这里是指全站仪在高程测量前,全站仪自由设站,通过测量测站外一个已知高程点,再通过全站仪相关的设置,从而完成全站仪高程测量设站的工作。
我们还是继续对照着这张老图进行分析:方法三:对边测量方法三的测量方法是一个纯粹的高差测量,操作也相当简单:全站仪架设在任意位置,不做任何高程测量的设置(即测站高程、仪器高、棱镜高均使用仪器内存值),分别对两个点测量其三角高差dZ(要保证棱镜高度不变),两者之差即为两点之高差,跟水准测量的后视减前视相反,这里应该是前视减后视。
其测量原理,在方法一中已经验证,在此不再赘述。
各种方法的适用情况:方法都出来了,都有测量原理,都是可行的,如果硬要说哪种方法好,本身这个问题就是个伪问题,因为每种方法各有优势,如果不结合实际情况,便不能确定到底哪种方法要好。
《全站仪操作》实训项目任务清单及考核标准

《全站仪操作》实训项目任务清单及考核标准任务一、天宇全站仪坐标测量及坐标放样(60学时)任务二、科力达全站仪坐标测量及坐标放样(30学时)任务三、全站仪对边、悬高、后方交会测量(30学时)任务四、全站仪面积测量(30学时)《全站仪操作实训》实操考核项目考核标准任务一、天宇全站仪数据采集—放样实操项目考核标准一、说明1.编制依据:《工程测量员国家职业技能鉴定标准》、《工程测量规范》 GB 50026-2007等设计编制。
2.适用范围:测量实训学生。
二、技能目标能够掌握测能够掌握仪器安置,望远镜调节方法、建站及建站质量检查、数据采集及测设方法步骤、记录、计算。
三、技术要求1.考核所用工具、材料:设备仪器:天宇全站仪、棱镜、钢尺等。
2.场地:建筑实训地基3.考核操作时间60min四、评分标准:天宇全站仪数据采集—放样实操项目考核标准考评员:五、记录表格:全站仪数据采集—放样记录表观测者:开始时间:结束时间:仪器型号及编号:天气:备注:综合评分以小组结合个人给定,在记录表备注栏注明观测者和记录者名字《全站仪操作实训》实操考核项目考核标准任务二、科力达全站仪数据采集—放样实操项目考核标准一、说明1.编制依据:《工程测量员国家职业技能鉴定标准》、《工程测量规范》 GB 50026-2007等设计编制。
2.适用范围:测量实训学生。
二、技能目标能够掌握测能够掌握仪器安置,望远镜调节方法、建站及建站质量检查、数据采集及测设方法步骤、记录、计算。
三、技术要求1.考核所用工具、材料:设备仪器:科力达全站仪、棱镜、钢尺等。
2.场地:建筑实训地基3.考核操作时间60min。
四、评分标准:科力达全站仪数据采集—放样实操项目考核标准考评员:五、记录表格:全站仪数据采集—放样记录表观测者:开始时间:结束时间:仪器型号及编号:天气:备注:综合评分以小组结合个人给定,在记录表备注栏注明观测者和记录者名字《全站仪操作实训》实操考核项目考核标准任务三、全站仪对边测量-悬高测量实操项目考核标准一、说明1.编制依据:《工程测量员国家职业技能鉴定标准》、《工程测量规范》 GB 50026-2007等设计编制。
全站仪后方交会在地形图修测中的应用
简单的分析 , 结合作者的实际测绘 经验 , 提出在实际测量 中须 要注意 的某 些事项 : 1待 定点与 各 已知 点夹角的 () 合理性 ;2 两点后方交会 的待定 点坐标象 限等 ; () 同时也简单说 明全蛄仪后方交会在地形 图修测 中的应用 。
[ 关键 词] 全站仅后 方交会 ; 形图; 地 修测 ; 应用 [ 中图分类号] P 1 2 [ 献标 识码 ] C 文 [ 文章编 号] 10 77 (0 2 ̄ — 03— 2 06— 15 21 )2 0 9 0 X
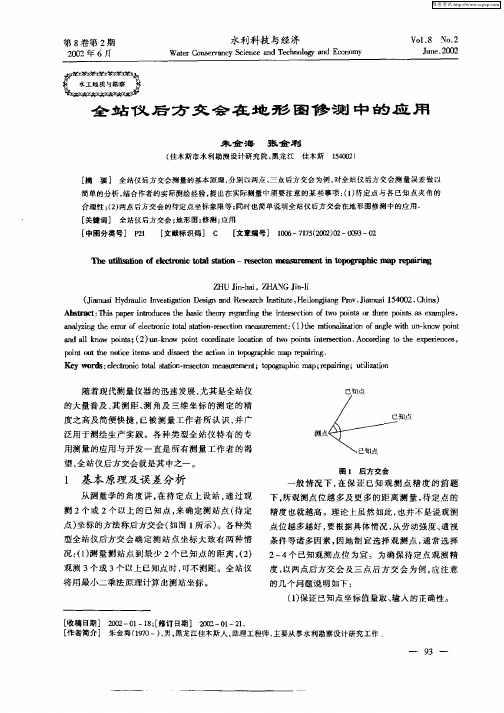
型全站 仪后方交 会 确 定 测站 点 坐标 大 致 有两 种 情 况 :1测 量测 站 点 到 最少 2个 已知 点 的 距 离 ,2 () ()
观测 3 或 3个 以上 已知 点 时 , 个 可不测距 。全站仪
2— 4个 已知观测 点位 为宜 。为 确保 待定 点 观测 精 度 , 两点后方交 会 及三 点后 方 交 会 为例 . 注意 以 应
ada nw pis ( ) nk o o t or nt l a o fw o t n r co . codn eepr ne . n l k o o t; 2 u —nw pi o ia c t no top i  ̄i e et n A cri t t xei cs l n nc d e ci n ts i g oh e
V 1 0 舟
No 2 .
J n .0 2 u e20
全 站 仪 后 方 交 会 在 地 形 图 修 测 中 的 应 用
未 金 海 张 金 利
佳术斯 140 ) 50 2
( 术斯市水利勘测设计 研究院 , 佳 黑龙江
[ 摘
要 ] 全站仪 后方交会测量的基本原理 , 分别 以两 点、 三点后 方交会为例 , 全站 仪后方交会 测量误差做 以 对
全站仪后方交会法步骤和高程测量步骤说课材料
全站仪后方交会法步骤和高程测量步骤1、角度测量(angle observation)(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠ AOB ,则:1)当精度要求不高时:瞄准 A 点——置零( 0 SET )——瞄准 B 点,记下水平度盘 HR 的大小。
2)当精度要求高时:——可用测回法( method of observation set )。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”( H SET )。
2、距离测量( distance measurement )PSM 、PPM 的设置——测距、测坐标、放样前。
1)棱镜常数(PSM )的设置。
一般: PRISM=0 (原配棱镜),-30mm (国产棱镜)2)大气改正数( PPM )(乘常数)的设置。
输入测量时的气温( TEMP )、气压( PRESS ),或经计算后,输入 PPM 的值。
(1)功能:可测量平距 HD 、高差 VD 和斜距 SD (全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”( MEAS )。
3、坐标测量( coordinate measurement )(1)功能:可测量目标点的三维坐标( X , Y , H )。
(2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。
若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:坐标:若输入:测站 S 高程,测得:仪器高 i ,棱镜高 v ,平距,竖直角,则有:高程:(3)方法:输入测站 S ( X , Y ,H ),仪器高 i ,棱镜高 v ——瞄准后视点 B ,将水平度盘读数设置为——瞄准目标棱镜点 T ,按“测量”,即可显示点 T 的三维坐标。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
全站仪后方交会标准差算法-回复
全站仪后方交会标准差算法是一种用于测量和校正地形和地形图数据中错误的算法。
本文将详细介绍后方交会的概念、全站仪的基本原理、后方交会标准差算法的步骤和计算方法。
一、后方交会的概念
后方交会是一种测量方法,通过在地面上放置全站仪进行观测,然后根据观测数据和相关的地理位置信息,计算出地面上各个点的坐标位置。
后方交会在土地测量、工程测量、地形图绘制等领域都有广泛的应用。
二、全站仪的基本原理
全站仪是一种精密的测量仪器,通过自动和手动调整观测仪器的参数,利用角度和距离观测测量点的水平和垂直角度以及与仪器的距离。
观测数据经过处理后,可以确定测量点的坐标位置。
全站仪具有快速、精确、全面和高效的特点,广泛应用于各种测量任务中。
三、后方交会标准差算法的步骤
后方交会标准差算法包括以下几个步骤:
1.观测数据采集:使用全站仪对目标点进行观测,记录水平角、垂直角和斜距数据。
观测过程中需要注意仪器的稳定和准确对准。
2.观测数据处理:按照测量次序和观测数据的特点,对观测数据进行处理和整理。
这包括数据的去除、筛选和修正等。
3.观测数据校正:根据已知和控制点的坐标,使用观测数据进行校正。
这个过程中需要使用后方交会标准差算法对数据进行处理。
4.测量点坐标计算:利用已校正的观测数据,结合先前测量的控制点坐标,使用三角法或其他测量计算方法,计算出待测点的坐标位置。
5.检查和调整:对计算得到的测量点坐标进行检查和调整,保证测量结果的准确性和可靠性。
如果发现误差较大或不符合预期要求,需要进行进一步的观测和调整。
四、后方交会标准差算法的计算方法
后方交会标准差算法用于对观测数据进行处理和校正,以提高测量结果的精度。
其计算方法如下:
1.计算观测数据的平均值:对每次观测数据的水平角、垂直角和斜距进行平均,得到平均值。
2.计算观测数据的中误差:对每次观测数据与平均值之差的平方进行求和,并除以总观测次数减1,得到中误差。
3.计算观测数据的方差:观测数据的方差等于中误差的平方。
4.计算观测数据的标准差:观测数据的标准差等于方差的平方根。
标准差越小,表明测量结果越稳定和准确。
通过以上步骤和计算方法,可以对后方交会中的观测数据进行处理和校正,提高测量结果的精度和可靠性。
总结:
本文详细介绍了后方交会的概念、全站仪的基本原理、后方交会标准差算法的步骤和计算方法。
后方交会标准差算法是一种用于纠正地形和地理数据错误的重要方法,具有广泛的应用价值。
通过合理和准确地进行后方交会观测和数据处理,可以提高测量结果的精度和可靠性,为各种地理信息应用提供可靠的支持。