距离后方交会计算
大数据时代测边后方交汇的计算公式及精度分析
大数据时代测边后方交汇的计算公式及精度分析摘要在图根控制测量中,交会定点是一种常用、简单的加密平面控制点的方法。
目前,随着全站仪的广泛使用,除了可以采用传统的测角交会方法外,测边交会加密平面控制点方法的运用越来越普遍。
但现在关于测边交会定点的计算主要是采用间接计算公式,公式推导不仅复杂,而且计算不易掌握。
基于此,本文就针对测边后方交汇的计算公式及精度进行分析研究。
关键词测边后方交汇;计算公式;精度分析前言由于测边后方交会定点具有布点灵活、施测方便、无须已知点之间互相通视且计算简便等优点,尤其在全站仪已普及应用的情况下,优点更为明显。
随着电子技术和计算机技术的发展,全站仪的测角和测距性能得到了很大程度的提高。
很多全站仪的测量、记录、数据预处理、显示等多种模块都向着智能化、集成化的方向发展,这样就大大减少了测设过程中的误差来源,提高了测量数据的精度。
1 测边后方交会定点的计算公式在实际的生产过程中,常常因工期紧,任务重,各项工作交叉进展,导致原有的测量控制点遭到不同程度的破坏,给施工测量工作带来了很大的困难。
例如两控制点不通视,在设备安装时某些部件上的控制点上只能放棱镜而不适宜架设仪器等情况。
以往为了解决工程测量中出现的这些问题,常用极坐标法、直角坐标法、无定向导线法等测设方法来确定加密点,这些方法不但工作量大,而且加密点往往达不到原有控制点的精度[1]。
而传统的后方交会方法是通过在加密点上观测3个已知方向的水平夹角来计算测站的平面坐标,它要求加密点不能位于由3个已知点构成的危险圆附近。
由于这些条件在城市工程测量中较难满足而限制了传统后方交会方法的使用。
为此,本文提出了测边后方交会方法。
它是通过在加密点P上安置全站仪,在已知点A、B上安置反射镜,通过测量水平距离P A、PB和水平角V,计算测站点的平面坐标。
与传统后方交会方法比较,测边后方交会只需要在加密点上观测附近任意两个已知点的水平距离和水平角就可以计算出测站点的坐标。
后方交会法计算推导公式
后方交会法计算推导公式后方交会法是一种用于计算物体在空间中的坐标和距离的方法。
它基于两个观测者在不同位置观测同一个物体的现象。
假设有两个观测者A和B,在空间中观测同一个物体P。
观测者A 和B的位置分别为A(xA, yA, zA)和B(xB, yB, zB)。
物体P在观测者A和B的朝向上的投影分别为a和b,它们的长度分别为dA和dB。
根据几何关系,可以推导出以下公式:dA = sqrt((xA - xP)^2 + (yA - yP)^2 + (zA - zP)^2)dB = sqrt((xB - xP)^2 + (yB - yP)^2 + (zB - zP)^2)其中,(xP, yP, zP)是物体P的坐标。
如果已知dA、dB和相关观测者位置的坐标,可以使用这些公式来计算物体P的坐标(xP, yP, zP)。
同时,如果已知物体P在两个观测者朝向上的投影长度a和b,也可以利用这些公式计算物体P到观测者A和B的距离。
需要注意的是,后方交会法在实际应用中可能会受到观测误差的影响,因此在计算时需要考虑这些误差,并采取合适的数据处理和精度控制方法。
拓展:后方交会法是测量和定位的重要方法之一,广泛应用于地理测量、摄影测量、建筑工程等领域。
它可以通过精确的测量和计算,确定物体在三维空间中的准确位置和形状,对于工程设计、地理信息系统等具有重要的实际应用价值。
除了后方交会法,还有其他一些方法可以用于测量和定位物体的坐标和距离,比如三角测量法、三角高程测量法、全站仪测量法等。
每种方法都有其适用的场景和局限性,根据具体的测量需求和条件选择合适的方法是非常重要的。
此外,随着科技的进步和发展,新的测量和定位技术不断涌现,为实现更精确和高效的测量和定位提供了更多的选择。
全站仪后方交会法步骤和高程测量步骤

1、角度测量(angle observation)(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠AOB ,则:1)当精度要求不高时:瞄准A 点——置零(0 SET )——瞄准B 点,记下水平度盘HR 的大小。
2)当精度要求高时:——可用测回法(method of observation set )。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(H SET )。
2、距离测量(distance measurement )PSM 、PPM 的设置——测距、测坐标、放样前。
1)棱镜常数(PSM )的设置。
一般:PRISM=0 (原配棱镜),-30mm (国产棱镜)2)大气改正数(PPM )(乘常数)的设置。
输入测量时的气温(TEMP )、气压(PRESS ),或经计算后,输入PPM 的值。
(1)功能:可测量平距HD 、高差VD 和斜距SD (全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”(MEAS )。
3、坐标测量(coordinate measurement )(1)功能:可测量目标点的三维坐标(X ,Y ,H )。
(2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。
若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:坐标:若输入:测站S 高程,测得:仪器高i ,棱镜高v ,平距,竖直角,则有:高程:(3)方法:输入测站S (X ,Y ,H ),仪器高i ,棱镜高v ——瞄准后视点B ,将水平度盘读数设置为——瞄准目标棱镜点T ,按“测量”,即可显示点T 的三维坐标。
全站仪后方交会法步骤和高程测量步骤

1、角度测量(angleobservation)?(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠AOB,则:1)当精度要求不高时:瞄准A点——置零(0SET)——瞄准B点,记下水平度盘HR的大小。
2)当精度要求高时:——可用测回法(methodofobservationset)。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(HSET)。
2、距离测量(distancemeasurement)?PSM、PPM的设置——测距、测坐标、放样前。
1)棱镜常数(PSM)的设置。
一般:PRISM=0(原配棱镜),-30mm(国产棱镜)2)大气改正数(PPM)(乘常数)的设置。
输入测量时的气温(TEMP)、气压(PRESS),或经计算后,输入PPM的值。
(1)功能:可测量平距HD、高差VD和斜距SD(全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”(MEAS)。
3、坐标测量(coordinatemeasurement)?(1)功能:可测量目标点的三维坐标(X,Y,H)。
(2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。
若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:?坐标:?若输入:测站S高程,测得:仪器高i,棱镜高v,平距,竖直角,则有:高程:?(3)方法:?输入测站S(X,Y,H),仪器高i,棱镜高v——瞄准后视点B,将水平度盘读数设置为——瞄准目标棱镜点T,按“测量”,即可显示点T的三维坐标。
4、点位放样(Layout)?(1)功能:根据设计的待放样点P的坐标,在实地标出P点的平面位置及填挖高度。
全站仪后方交会法步骤和高程测量步骤

全站仪后方交会法步骤和高程测量步骤集团公司文件内部编码:(TTT-UUTT-MMYB-URTTY-ITTLTY-1、角度测量(angleobservation)?(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠AOB,则:1)当精度要求不高时:瞄准A点——置零(0SET)——瞄准B点,记下水平度盘HR的大小。
2)当精度要求高时:——可用测回法(methodofobservationset)。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(HSET)。
2、距离测量(distancemeasurement)?PSM、PPM的设置——测距、测坐标、放样前。
1)棱镜常数(PSM)的设置。
一般:PRISM=0(原配棱镜),-30mm(国产棱镜)2)大气改正数(PPM)(乘常数)的设置。
输入测量时的气温(TEMP)、气压(PRESS),或经计算后,输入PPM的值。
(1)功能:可测量平距HD、高差VD和斜距SD(全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”(MEAS)。
3、坐标测量(coordinatemeasurement)?(1)功能:可测量目标点的三维坐标(X,Y,H)。
(2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。
若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:?坐标:?若输入:测站S高程,测得:仪器高i,棱镜高v,平距,竖直角,则有:高程:?(3)方法:?输入测站S(X,Y,H),仪器高i,棱镜高v——瞄准后视点B,将水平度盘读数设置为——瞄准目标棱镜点T,按“测量”,即可显示点T的三维坐标。
后方交会原理

后方交会原理
后方交会原理是指在地图上已知两点的坐标,通过测量这两点
到另外一个点的水平角和垂直角,然后计算出该点的坐标的方法。
后方交会原理是实地测量中常用的一种方法,它可以帮助测量员准
确地确定某一点的坐标,为工程测量提供了重要的依据。
在进行后方交会时,首先需要确定已知点的坐标,然后通过测
量仪器测量出待求点到已知点的水平角和垂直角。
接下来,根据已
知点的坐标和测量得到的角度信息,利用三角函数关系进行计算,
最终得出待求点的坐标。
后方交会原理的核心在于角度的测量和三角函数的运用。
测量
角度时需要使用精密的测量仪器,确保测量结果的准确性。
而在计
算坐标时,需要熟练掌握三角函数的运用方法,以及对已知点坐标
的精确掌握。
在实际的工程测量中,后方交会原理被广泛应用于地形测量、
建筑测量、道路测量等领域。
通过后方交会原理,测量员可以快速、准确地确定各个点的坐标,为工程设计和施工提供了可靠的数据支持。
需要注意的是,在进行后方交会时,测量员需要严格按照测量规程进行操作,确保测量的准确性和可靠性。
同时,对于测量仪器的使用和维护也需要进行规范的管理,以保证测量数据的可信度。
总的来说,后方交会原理是一种重要的测量方法,它通过测量角度和运用三角函数,能够准确地确定点的坐标,为工程测量提供了重要的技术支持。
在实际应用中,需要严格按照规程进行操作,确保测量数据的准确性和可靠性,为工程设计和施工提供可靠的数据支持。
利用编程计算器进行距离后方交会的严密平差计算
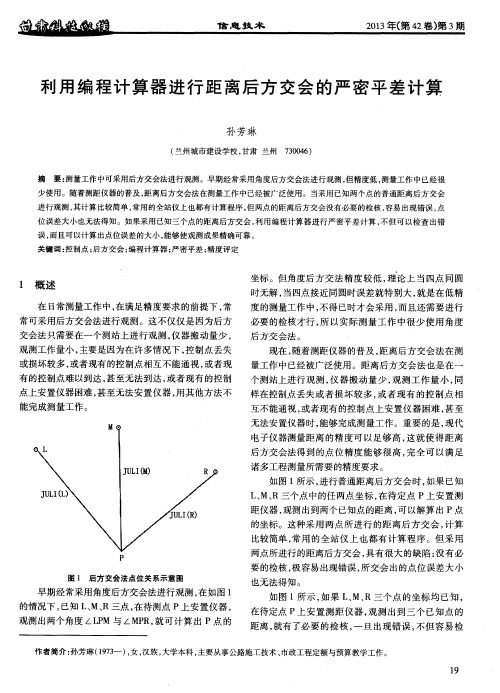
本 论述 采 用测 量业 中广 泛使 用 的 C A S I O编 程计 算 器, 按 条件 平差 的方法进 行 严 密平 差 , 计 算 出交 会 点 的 坐标 , 并进 行精 度 检 核 与 评 定 。在 待 测 点 P处 安 置 仪
器, 观 测 P点到 左边 L点 的距离 J U L I ( L ) 、 中间 M 点 的 距离 J U L I ( M) 和右 边 R点 的距 离 J U L I ( R) 。然 后根 据
L点 的坐标 x( L)、 Y( L ) , M 点 的坐 标 x( M)、 Y( M)
和 R点的坐标 x ( R )、 Y ( R ), 就可以平差计算 出 P点
的坐 标 x p、 Y p , 并进 行精 度评 定 。
信 息技 术
2 0 1 3 年( 第4 2 卷) 第3 期
利 用 编 程计 算 器 进 行 距 离后 方 交会 的严 密 平差 计 算
孙芳琳
( 兰州城市建设学校 , 甘肃 兰州 7 3 0 0 4 6 )
摘
要: 测量工作 中可采用后方交会法进行观测 。早期经 常采用 角度后方交会法进行观测 , 但精 度低 , 测量位 中误 差 D I A N WE I
WU C H A及交 会 点 P的坐标 X p、 Y p 。
5 算例
已知 三 点 L ( 4 2 1 2 . 7 6 3 , 6 6 1 5 . 3 9 0 ) 、 M( 4 6 2 3 . 8 7 5 , 5 4 4 3 . 2 8 5 ) 、 R( 5 7 4 2 . 2 8 5, 5 8 3 5 . 4 1 0 ) 。测 得 P点 到 左
少使用 。随着测距仪器 的普及 , 距离后方交会法在测量工作 中已经被 广泛使用 。当采用 已知两个点的普通距离后 方交会 进行观测 , 其计算 比较简单 , 常用 的全站 仪上也都 有计算程序 , 但 两点 的距 离后 方交会没有必要的检核 , 容 易出现错误 , 点 位误差 大小 也无 法得 知。如果 采用 已知三个点的距离后方交会 , 利用 编程计算器 进行严密 平差计算 , 不但 可 以检查 出错 误, 而且可以计算 出点位误差的大小 , 能够使观测成果精确可靠 。 关键词 : 控制点 ; 后方交会 ; 编程计算器 ; 严 密平差 ; 精度评定
后方交会法计算原理

后方交会法计算原理一、已知参数:A点(20515.6960,12164.6580)、B点(20546.1240,12497.4690)A-架仪点平距:La、B-架仪点平距:Lb二、求解方位角:1、Aab=tan-1((Yb-Ya)/ (Xb-Xa))= tan-1((12164.658-12497.469)/(20546.124-20515.696))=84°46'34”2、Lab=√((Xa-Xb)2+(Ya-Yb)2)=334.199=c三、求解夹角:1、C点处夹角c、A点处夹角a、B点处夹角b2、C=cos-1√((C2- a2-b2)/2ab):由余弦定理公式得3、A=sin-1 (La×sinC)/Lab):由正弦定理公式得4、B=sin-1 (Lb×sinC)/Lab):由正弦定理公式得四、求解方位角:1、La边方位角a、Lb边方位角b2、a=Aab+A3、b=Aab-B五、求解坐标:1、C点处坐标:(由点A处推算)Cx=Xa+La×cosa、Cy=Ya+La×sina2、C点处坐标:(由点B处推算)Cx=Xb+Lb×cosb、Cy=Yb+Lb×sinb计算简图如下:斜交放样方法:一、已知参数1、A点桩号:A2、斜距离:S3、斜交角:a二、求解路线右幅:Δx=S×sina、Δy=S×cosa 右幅桩号=A+Δy、边距=Δx 三、求解路线左幅:Δx=S×sina、Δy=S×cosa 右幅桩号=A-Δy、边距=Δx计算简图:。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
距离后方交会计算(CASIO fx-4800P计算器)程序一、程序功能本程序适用于在一个未知点上设测站,观测两到个已知点的距离后,解算该未知坐标。
本程序也可以在CASIO fx-4500P计算器及 CASIO fx-4850P计算器上运行。
注意:这种观测两到个已知点的距离后解算该未知坐标的方法,缺少多余观测值,也就缺少检核条件。
二、源程序Lbl 1:{ABCDEFQ}:A"XA":B”YA”:C"XB":D"YB":E"D1":F"D2":Q:J=0:G=Pol(C-A, D-B) :H=J+QCos-1((GG+EE-FF)÷2÷G÷E):X"XP"=A+ECosH◢Y"YP"=B+ESinH◢Goto 1←┘注:CASIO fx-4850改如下Lbl 1:{ABCDEFQ}:A"XA":B”YA”:C"XB":D"YB":E"D1":F"D2":Q:J=0:G=Pol(C-A, D-B) :H=J+QCos-1((GG+EE-FF)÷2÷G÷E):"XP":X=A+ECosH◢"YP":Y=B+ESinH◢Goto 1←┘三、使用说明1、规定(1) 未知点为P点,已知点分别为A点、B点;(2) P点至A点的距离为D1,P点至B点的距离为D2;(3) 当A、B、P三点逆时针排列时,Q=-1;当A、B、P三点顺时针排列时,Q=1。
2、输入与显示说明输入部分:XA ? 输入A点的X坐标YA ?输入A点的Y坐标XB ? 输入B点的X坐标YB ?输入B点的Y坐标D1 ?输入P点至A点的距离为D1D2 ?输入P点至B点的距离为D2Q ?输入A、B、P三点排列方式(逆时针时,Q=-1;顺时针时,Q=1)显示部分:XP=×××所求点P的X坐标YP=×××所求点P的Y坐标四、算例已知XA=539.3551,YB=602.9159,Xb=433.0034,YB=1087.4213,D1=380.7996,D2=245.8664,A、B、P三点排列方式为逆时针(Q=-1),求P点的坐标。
输入数据后,经计算得XP=647.8773101YP=967.92448254800计算器求直线缓和曲线圆曲线上任一里程中桩坐标4800计算器求直线、缓和曲线、圆曲线上任一里程中桩坐标及左右任意角度、任意距离的点的坐标的程序A“XA”:B“YA”:C“CA”:D“1/RA”:E“1/RB”:F“DKA”:G“DKB”:Z[3]=F:Z[4]=D : ←Lb1 1:{HSOR}:H“DKI”:H>G=>Goto3:ΔH<Z[3]= >Goto0:ΔS“Jo”:O“DL”:R“DR”:D=0=>Z[6]=0:≠=> Z[6]=1:ΔE=0=> Z[7]=0:≠=> Z[7]=2:ΔZ[8]=Z[6]+Z[7]:Z[8]=0=> Z[9]=G-Z[3]:ΔZ[8]=1=> Z[9]=Abs(0.2/Z[4]):ΔZ[8]=2=>Z[9]=Abs(0.2/E): ΔZ[8]=3=>Z[9]=Abs(0.2/E): ΔH=G=> H=H-0.0001: Δ←Lb1 2:P=(E-D)/Abs(G-F):Q=H-F:Z[1]=Abs(H-F):Z[1]>Z[9]=> Q=QZ[9]/Z[1]: ΔI=PQ:T=D+I:J=C+90Q(I+2D)/π:M=C+45Q(I/4+2D)/(2π):N=C+135Q(3I/4+2D)/(2π):K=C+45Q(I/2+2D)/ π:X=A+Q/12×(cosC+4(cosM+cosN)+2cosK+cosJ):Y=B+Q/12×(sinC+4(sinM+sinN)+2sinK+sinJ):←Z[1]≤Z[9]=> J=J◢X=X◢Y=Y◢U“XL”=X+Ocos(J-S) ◢V“YL”=Y+Osin(J-S) ◢W“XR”=X+Rcos(J-S+180) ◢Z“YR”=Y+Rsin(J-S+180) ◢A=X:B=Y:C=J:D=T:F=H:Goto 1: Δ←A=X:B=Y:C=J:D=T:F=F+Q:Goto 2: Δ←Lb1 3:A=X:B=Y:C=J:D=E:F=G:Z[3]=G:Z[4]=E:{EG}:E“1/RB”:G“DKB”:Goto 1←Lb1 0:{FABCD}:F“DKA”:A“XA”:B“YA”:C“CA”:D“1/RA”:E=Z[4]:Z[4]=D:G=Z[3]:Z[3]=F:Goto 1程序说明:1、编程前先将存储区扩大9个(至35个);该程序适合任何线型,任何半径,误差均在毫米之内。
2、该程序可在该区内任意输入里程,若所输里程小于起点里程,则程序提示输入前一区间起点里程、坐标、方位角及曲率,完成过渡。
若要转入下一区间,则必须输入该区间终点里程后,再输入下一区间的里程及终点里程、曲率、完成过渡。
总之,该程序前进时为有意识,而后退时可在无意识时。
(注意:如果前进时无意识,即未输终点里程,会出错)。
3、该程序可重复输入任一里程(包括起、终点),从而可达到求出某一里程不同距离(不同角度)点坐标。
4、符号注解:输入数据含义:XA、YA、CA——起点坐标,起点切线方位角DKA、DKB、DKI——起终点及待求点的里程Jo——与线路切线斜交角度(左侧上方夹角)如为法线方向则Jo=90圆:起±1/R,终±1/R直线头或尾与缓和曲线头曲率输入0(曲线左偏曲率为“-1/R”,右偏曲率为“+1/R”)结果显示数据含义:X、Y、J——所求里程的中桩坐标及切线方位角XL、YL、XR、YR——左右边桩的坐标高速公路的线路计算公式一、缓和曲线上的点坐标计算已知:①缓和曲线上任一点离ZH点的长度:l ②圆曲线的半径:R③缓和曲线的长度:l④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当计算第二缓和曲线上的点坐标时,则: l为到点HZ的长度α为过点HZ的切线方位角再加上180° K值与计算第一缓和曲线时相反x Z ,yZ为点HZ的坐标切线角计算公式:二、圆曲线上的点坐标计算已知:①圆曲线上任一点离ZH点的长度:l ②圆曲线的半径:R③缓和曲线的长度:l④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当只知道HZ点的坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180° K值与知道ZH点坐标时相反x Z ,yZ为点HZ的坐标三、曲线要素计算公式公式中各符号说明:l——任意点到起点的曲线长度(或缓曲上任意点到缓曲起点的长度)l 1——第一缓和曲线长度 l2——第二缓和曲线长度l——对应的缓和曲线长度 R——圆曲线半径R 1——曲线起点处的半径 R2——曲线终点处的半径P 1——曲线起点处的曲率 P2——曲线终点处的曲率α——曲线转角值四、竖曲线上高程计算已知:①第一坡度:i1(上坡为“+”,下坡为“-”)②第二坡度:i2(上坡为“+”,下坡为“-”)③变坡点桩号:SZ④变坡点高程:HZ⑤竖曲线的切线长度:T ⑥待求点桩号:S计算过程:五、超高缓和过渡段的横坡计算已知:如图,第一横坡:i1第二横坡:i2过渡段长度:L 待求处离第二横坡点(过渡段终点)的距离:x 求:待求处的横坡:i解:d=x/Li=(i2-i1)(1-3d2+2d3)+i1六、匝道坐标计算已知:①待求点桩号:K ②曲线起点桩号:K0③曲线终点桩号:K1④曲线起点坐标:x0,y⑤曲线起点切线方位角:α⑥曲线起点处曲率:P(左转为“-”,右转为“+”)⑦曲线终点处曲率:P(左转为“-”,右转为“+”)1求:①线路匝道上点的坐标:x,y ②待求点的切线方位角:αT计算过程:注:sgn(x)函数是取符号函数,当x<0时sgn(x)=-1,当x>0时sgn(x)=1,当x=0时sgn(x)=0。
在计算器中若无此函数可编一个小子程序代替。
南方CASS测绘成图软件应用常见问题解答问:CASS屏幕菜单不见了?答:如果关掉了,打开CAD设置,显示屏幕菜单就可以了,如果最小化了,拉下来就行了问:CASS51,CASS61(PJ)在CAD2002中文字消隐始终用不了?答:南方CASS5.1~6.1文字消隐不能使用,这在正版中也存在。
实际上是因为你的CAD没有安装EXpress增效工具,而非CASS软件破解不完善。
问:如何去掉菜单栏与工具栏之间较大的空白?答:把Acrobat软件去掉就可以了问:我在cass5.1中画的图怎么保存不了,会出对话框说:写入/关闭文件时出错?答:选取有用的图纸内容,用cass5.1的窗口存盘或多边形存盘功能将图纸另存为另一文件。
问:CASS5.0中在图幅整饰中,为什么不能完全删除图框外实体?答南方CASS在图纸分幅中,确实存在一些问题,特别是采用批量分幅,还存在分幅后缺这少那的问题。
其中:1、一部份是操作者的问题,在分幅时要求图纸全屏显示,关闭对象捕捉等;2、一部份是软件平台AUTOCAD本身存在,如图幅边有不可分割的字体、块等;3、还有是CASS软件存在的缺陷,特别是在CASS5.1以前的版本。
实际上这个问题南方公司早就注意到了,在推出的最新版6.1中问题就较少。
建议楼主使用南方CASS新版。
问:如何从cass的界面切换到autocad的界面?答:在CASS中,按下例选项操作既可:文件-AUTOCAD系统配置-配置-UNNAMED PROFILE-置为当前-确定。
问:在cass软件上怎么才能显示点号呀答:数据文件上的点号有的话,通过展点就可以了问:断面图文字不能修改,表格也没法修改,整个断面及表格、文字就像一个块,且不能打断。
是什么原因?答:把编辑里的编组选择关闭即可问:在CASS6.0中成图时为什么高程点位与数据不能分开,当数据压盖地物时不好只移位数据而点位不变?在CASS6.0的“编辑”中“图层控制”子菜单中为什么象“实体层→当前层”等好多菜单命令都是无效命令?答: 在cass6.1中将“文件-cass6.1参数配置-地物绘制-展点注记”设为分置即可分开。