操纵系统的人机工程学数据
人机工程学标准

人机工程学标准:
人机工程学标准是一个跨学科的领域,涉及心理学、生理学、人体测量学、工程学等多个学科。
其目的是确保人机系统能够高效、安全地工作,并使人在操作过程中感到舒适和满意。
以下是一些常见的人机工程学标准:
1.人体测量数据:人机工程学需要应用人体测量数据来设计适合人类使用的产品和环
境。
例如,座椅的高度、显示器的位置和大小、控制器的操作方式等都需要根据人体测量数据来设计。
2.人体生理特性:人机工程学需要考虑人体的生理特性,例如人体的肌肉力量、骨骼
结构和运动能力等。
这些特性决定了人在操作过程中能够承受的负荷和动作范围,从而影响产品的设计。
3.感知和认知特性:人机工程学需要考虑人的感知和认知特性,例如视觉、听觉、触
觉、记忆和思维等。
这些特性决定了人在操作过程中的反应速度和准确性,从而影响人机系统的性能。
4.安全性和可靠性:人机工程学需要考虑产品的安全性和可靠性,确保产品在使用过
程中不会对人的健康和安全造成危害。
例如,产品的材料、结构和功能都需要经过严格的安全评估和测试。
5.环境和设施:人机工程学需要考虑环境和设施的设计,确保人在适宜的环境中工作
和生活。
例如,室内温度、照明、噪音和空气质量等都需要根据人的需求来设计和调节。
6.可用性和可维护性:人机工程学需要考虑产品的可用性和可维护性,确保人在使用
过程中能够方便地操作和维护产品。
例如,产品的操作界面、维修保养方式和存储方式等都需要经过精心的设计。
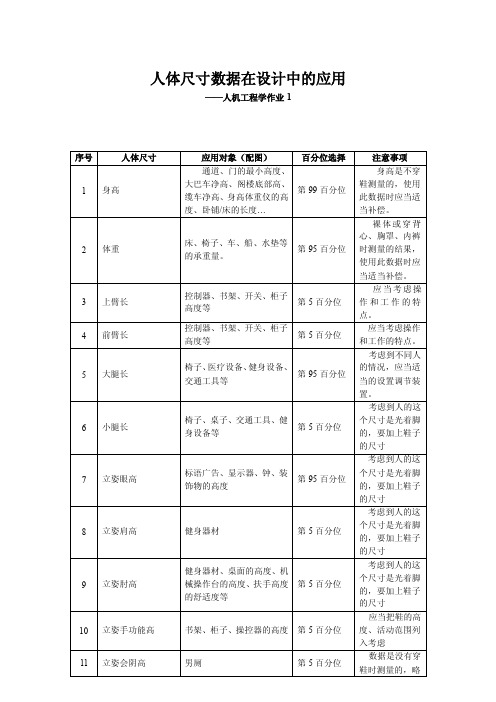
人机工程学人体尺寸表

人机工程学人体尺寸表1. 引言人机工程学(Human factors engineering)是一门研究人类与机器系统交互的学科。
在设计产品、设备、工作场所和任务时,了解人体尺寸的重要性不言而喻。
人机工程学人体尺寸表是一个重要的工具,用于帮助设计师和工程师在设计过程中考虑人体尺寸的因素。
本文将介绍一些常用的人体尺寸表以及其在人机工程学领域的应用。
2. 常用人体尺寸表2.1 完整人体尺寸表完整的人体尺寸表通常包含多个不同身体部位的尺寸数据,例如身高、体重、手臂长度、腿长、足踝圆周等。
这些尺寸数据可以帮助设计师确认设备或产品的尺寸是否适合大多数人群使用,以确保舒适性和安全性。
2.2 身高分布表身高分布表用于显示不同年龄和性别的人群的身高分布情况。
设计师可以根据这些数据来确定设计的端到端尺寸范围,以确保产品在人口统计学上的兼容性。
2.3 手部尺寸表手部尺寸表用于提供关于手掌和手指长度、宽度以及手型类别的尺寸数据。
这些数据对于设计需要人手操作的产品或设备非常重要,例如手机、键盘、鼠标等。
2.4 坐姿尺寸表坐姿尺寸表用于提供关于人体坐姿方面的尺寸数据,例如坐高、髋宽、背部高度等。
这些数据对于设计需要人坐姿操作的产品或设备非常重要,例如办公椅、汽车座椅等。
3. 应用案例人机工程学人体尺寸表在各个领域都有广泛的应用。
以下是一些应用案例的简要介绍:3.1 交通工具设计在汽车、飞机、火车等交通工具的设计中,合理的人体尺寸考虑对于乘客的舒适性和安全性至关重要。
通过人体尺寸表,设计师可以确定座椅高度、深度、宽度,以及控制面板和按钮的位置,从而提升用户体验。
3.2 办公设备设计在办公室环境中,人们需要长时间坐在椅子上使用电脑或者其它办公设备。
合理的人体尺寸考虑可以减轻工作人员的劳动强度,预防职业病。
通过人体尺寸表,设计师可以确定办公椅的高度、扶手的高度和宽度,从而提供更好的支撑和舒适性。
3.3 医疗设备设计医疗设备的设计需要结合人体尺寸和人体解剖学来确保治疗和检测的准确性。
操纵系统的人机工程学数据PPT共33页
46、我们若已接受最坏的,就再没有什么损失。——卡耐基 47、书到用时方恨少、事非经过不知难。——陆游 48、书籍把我们引入最美好的社会,使我们认识各个时代的伟大智者。——史美尔斯 49、熟读唐诗三百首,不会作诗也会吟。——孙洙 50、谁和我一样用功,谁就会和我一样成功。——莫扎特
操纵系统的人机工程学数据
1、战鼓一响,法律无声。——英国 2、任何法律的根本;不,不成文法本 身就是 讲道理 ……法 律,也 --。——爱·科 克 4、一个国家如果纲纪不正,其国风一 定颓败 。—— 塞内加 5、法律不能使人人平等,但是在法律 面前人 人是平 等的。 ——波 洛克
第10章人机工程学有关功能参数

第10章人机工程学有关功能参数第10章人机工程学相关功能参数一、响应时间响应时间是指用户输入操作后,系统作出反应所需的时间。
它是衡量系统响应速度快慢的重要指标之一。
响应时间短可以提高用户的使用体验,使用户感觉系统反应迅速、流畅。
而响应时间长则容易引起用户的不耐烦和不满意。
因此,在设计人机界面时,需要尽量缩短响应时间,提高系统的响应速度。
二、误操作率误操作率是指用户在使用系统时发生误操作的概率。
误操作率高会导致用户频繁进行纠错操作,增加了用户的操作负担,降低了用户的使用效率。
因此,在设计人机界面时,应尽量降低误操作率,减少用户的误操作。
三、易学性易学性是指用户初次使用系统时所需的学习成本。
系统的易学性高意味着用户可以迅速上手,无需花费过多的时间和精力学习系统的使用方法。
而易学性低则会增加用户的学习负担,降低用户的使用效率。
因此,在设计人机界面时,应尽量提高系统的易学性,使用户能够快速掌握系统的使用方法。
四、可靠性可靠性是指系统在正常使用过程中的稳定性和可靠性能。
系统的可靠性高意味着系统能够稳定运行,不会频繁出现故障和错误。
而可靠性低则会导致系统的不稳定和频繁的故障,影响用户的使用体验和工作效率。
因此,在设计人机界面时,需要保证系统的可靠性,提高系统的稳定性和可靠性。
五、可维护性可维护性是指系统在运行过程中的易维护性能。
系统的可维护性高意味着系统的故障可以快速定位和修复,系统的升级和维护也更加方便。
而可维护性低则会增加系统的维护成本和维护困难度,影响系统的运行和用户的使用体验。
因此,在设计人机界面时,应考虑系统的可维护性,设计合理的系统结构和界面布局,方便系统的维护和升级。
六、可用性可用性是指系统能够满足用户需求的程度。
系统的可用性高意味着系统能够提供丰富的功能和良好的用户体验,满足用户的各种需求。
而可用性低则会导致系统功能不完善,用户体验差,无法满足用户的需求。
因此,在设计人机界面时,应注重提高系统的可用性,设计符合用户习惯和期望的界面,提供丰富的功能和良好的用户体验。
人机工程学实验报告

人机工程学实验报告Hust工业设计专业,人机工程课程实验报告必做实验(7个):一、镜画仪:是一项目动作技能迁移的实验。
因通过镜子反射,和原图形相比镜中图像是上下倒置而左右不变。
实验一错误次数使用时间实验者1 15 1分30秒实验者2 13 4分14秒34实验者3 20 1分57秒8实验二错误次数使用时间实验者1 5 44秒实验者2 0 39秒实验者3 8 1分28秒4自变量:试验次数因变量:出错次数、使用时间实验数据分析结果:1.随着实验次数的增加,实验者不变,但是其所用时间及错误次数都在变少,熟练程度明显增加。
2.在同样的情况和同样的图案上,实验的后一次测验比前一次的测验有所进步,就为正迁移效果。
二、光亮度辨别仪光亮度辨别仪的作用:心理学中常用的一种视觉实验仪器。
它可以测定明度差别阈限,也可以制作明度量表。
光亮度真实值实际测量值△差值1 230 190 402 180 200 203 140 140 0自变量:光亮度真实值因变量:实际测量值、差值实验数据分析结果:随着光亮度的增加,实验者对于光的敏感度下降,误差变大。
应用范围:可调节亮度的台灯,它的优点在于调节亮度的装置消耗的电能极少,节约了电能,减少了不必要的损耗,灯的亮度可根据不同的天气,不同的时间,人们不同的需求,调节不同的亮度,方便人们的生活。
三、瞬时记忆实验仪仪器同时呈现一组随机数字或字母,在部分报告法实验中,要求被试再现当时指定的一部分,然后在指定的时间内通过大脑记录下来。
瞬时刺激时间记忆保存量1 9.50秒12.002 7.50秒12.003 5.50秒09.00自变量:瞬时刺激时间因变量:记忆保存量实验数据分析结果:人的大脑在瞬时记忆中,记忆的时间越长,准确率越高。
四、记忆广度测试仪适用于心理特点测定中的数字记忆广度实验和提高记忆力的训练。
并具有同时测量被试视觉、记忆、反应速度三者结合能力的功能,是一种常用的心理学测量仪器。
分数出错位数实验者1 8 7.25实验者2 6 6实验者3 5 5自变量:不同的实验者因变量:记忆广度分数、出错位数实验数据分析结果:因为人与人的不同,其记忆能力不同,有记忆广度大的,也有记忆广度小的。
人机工程学 数据

中国地质大学安全工程系
4.3.1 心理修正量定义
人机工程学
为了消除空间压抑感、恐惧感,或为了美观等心 理因素而加的尺寸修正量。
如工程机械驾驶室,若其空间大小刚刚能容下人 们完成必要的操作活动,是不够的,因为这样会使人 们在其中感到局促和压抑,为此应该放出适当的余裕 空间。
这余裕空间就是心理修正量。
动态人体尺寸
用背肌活 动度测定 适宜操作 位置图
中国地质大学安全工程系
人机工程学
5.3 成人动态最小占用空间示意图(a)
人机工程学
中国地质大学安全工程系
安全工程系
第二章 人体测量及其应用
中国地质大学安全工程系
本章大纲
人机工程学
ቤተ መጻሕፍቲ ባይዱ
人体测量 人体尺寸 人体尺寸数据的应用 设施器物的人体尺寸适应性(高起专了解) 设计用人体模板 (高起专了解)
中国地质大学安全工程系
本章重难点介绍
人机工程学
本章重点在于了解掌握基本的人体测量方法。
第五节 设施器物的人体尺寸适应性 人机工程学
上图是设施器物设计合理的典范。 a、b、c分别为小、中、大型机床,它们整体尺寸相差悬殊,但它 们的操纵装置都应该安置在操作者肢体易于活动的范围内。
中国地质大学安全工程系
5.1 设施器物的人体尺寸适应性(a)
人机工程学
例如,手的操作高度大体在胸部上下,见图。为此, 小型台式机床要放置在台面上,见图a,而大型机床则要 将操作装置从机床体上分离出来,也安置在便于操作的 高度,见图c。
Y X b
中国地质大学安全工程系
第二节 中国成年人的人体尺寸
人机工程学
GB/T l0000--19887组、47项静态人体尺寸数据:
人机工程学数据(表格)
行修正 根据不同的衣 着、活动范围进 行修正 根据不同的衣 着、活动范围进 行修正 根据不同的衣 着、活动范围进 行修正 根据不同的衣 着、活动范围进 行修正 根据不同的衣 着、活动范围进 行修正 根据不同的衣 着、活动范围进 行修正 根据不同的衣 着、活动范围进 行修正 根据不同的衣 着、活动范围进 行修正 根据人的不同心 理,适当补偿 根据人的不同心 理,适当补偿 根据人的不同心 理,适当补偿 根据人的不同心 理,适当补偿 根据人的不同心 理,适当补偿 根据人的不同心 理,适当补偿行 修正 根据人的不同心 理,适当补偿 根据人的不同心 理,适当补偿 根据人的不同心 理,适当补偿
第 5 百分位
第 95 百分位 第 5 百分位到 第 95 百分位 第 5 百分位到 第 95 百分位 第 5 百分位到 第 95 百分位
第 95 百分位
第 95 百分位
第 95 百分位
第 95 百分位 第 5 百分位到 第 95 百分位
根据人的不同心 理,适当补偿 根据人的不同心 理,适当补偿 根据人的不同心 理,适当补偿 根据人的不同心 理,适当补偿 根据人的不同心 理,适当补偿 根据不同的衣 着、活动范围进 行修正 根据人的不同心 理,适当补偿 根据人的不同心 理,适当补偿 根据人的不同心 理,适当补偿 根据人的不同心 理,适当补偿
第 5 百分位至 第 95 百分位 第 95 百分位 第 95 百分位
微调整 数据是没有穿鞋 时测量的,略微 调整
应把活动范围 和衣物的厚度列 入考虑范围
应把活动范围 和衣物的厚度、 座椅的软硬程度 列入考虑范围
应把头部活动 范围,椅子的高 低和软硬程度列 入考虑范围
应把椅子的软 硬程度列入考虑 范围 应把椅子的软硬 程度列入考虑范 围
人机工程学数据

人体工程学下发数据在已知身高的情况下——如下:男子(立姿)1、眼高——0.933H2、肩高——0.844H3、肘高——0.600H4、脐高——0.600H5、臀高——0.467H6、膝高——0.267H7、腕—腕距——0.800H8、肩—肩距——0.222H9、胸深0.178H 10、前臂长(包括手)0.267H11、肩—指距——0.467H 12、双手展宽——1.000H13、手举起最高点——1.278H(坐姿)14、坐高——0.222H 15、头顶—座距——0.533H16、眼—坐距——0.467H 17、膝高——0.267H18、头顶高——0.733H 19、眼高——0.700H20、肩高——0.567H 21、肘高——0.356H22、腿高——0.300H 23、坐深——0.267H女子(立姿)1、眼高——0.933H2、肩高——0.844H3、肘高——0.600H4、脐高——0.600H5、臀高——0.467H6、膝高——0.267H7、腕—腕距——0.800H8、肩—肩距——0.213H9、胸深0.133H~0.177H 10、前臂长(包括手)0.267H11、肩—指距——0.467H 12、双手展宽——1.000H13、手举起最高点——1.278H(坐姿)14、坐高——0.222H 15、头顶—座距——0.533H16、眼—坐距——0.467H 17、膝高——0.267H18、头顶高——0.733H 19、眼高——0.700H20、肩高——0.567H 21、肘高——0.356H22、腿高——0.300H 23、坐深——0.267H在已知人的身高H(cm)、体重W(kg)、体积V时,身体中心关节的距离)(单人)1、一人侧立宽度——(静)30;(动)512、一人侧立、一人正立宽度——(静)119;(动)903、一人正立宽度——(静)66;(动)534、一人单手提箱宽度——(静)81;(动)715、一人双手提箱宽度——(静)102;(动)916、一人单手托盘宽度——(静)102;(动)917、一人单手打伞宽度——(静)122;(动)1128、一人正面坐姿宽度——(静)91;(动)769、一人扶梯下楼宽度——(单向)76;(双向)122单位: mm百分位数 1 5 10 50 90 95 9 身高1543 1583 1604 1678 1754 1775 1814 体重kg 44 48 50 59 71 75 83 眼高1436 1474 1495 1568 1643 1664 1705 肘高925 954 968 1024 1079 1096 1128 坐高836 856 870 908 947 958 979 坐姿眼高729 749 761 798 836 847 868 坐姿肘高214 228 235 263 291 298 312 坐姿大腿厚103 112 116 130 146 151 160 坐姿膝高441 456 464 493 523 532 549 坐深407 421 429 457 486 494 510 臀膝距499 515 524 554 585 595 613 胸宽242 253 259 280 307 315 331 最大肩宽383 398 405 431 460 469 486 坐姿臀宽284 295 300 321 347 355 369 坐姿两肘间宽353 371 381 422 473 489 518(毫米)1、身高:1800(1660)2、肩高:15003、肘高:9004、中指尖上举高:19505、肩宽:4206、胸厚:2707、肩指点举例:630 8、腋下高:12309、踮高:2100 10、坐高:96011、坐姿肘高:270 12、坐姿膝高:54013、坐姿大腿厚:150 14、小腿加足高:45015、臀膝距:670 16、坐深:45017、坐自两肘肩宽:450 18、坐姿臀宽:390 19、蹲高:1200 20、蹲距:690 21、单腿跪高:132022、卧式高度:4501、立姿:单手托举最大高度:1860 单手托举舒适高度:1650单手推拉最大高度:1950 单手推拉舒适高度:1500单手取放最大高度:1800 单手取放舒适高度:13502、坐姿:阅读桌台面的舒适高度:720 写字台台面的舒适高度:690打字桌台面的舒适高度:660 单手推拉舒适高度:360单手取放舒适高度:9603、弯姿单手推拉舒适高度:480 单手取放舒适高度:7804、蹲姿单手推拉舒适高度:480 单手取放舒适高度:6605、跪姿单腿推拉舒适高度:660 单腿取放舒适高度:720(最小值+安全尺寸,单位:毫米)1、立姿单手托举:510+150 单手推拉:600+150单手取放的柜前距离:360+150 单手取放的搁置深度:420 2、坐姿看书:480+200 写字:480+200打字:480+200 单手推拉:570+200单手取放的柜前距离:480+200 单手取放的搁置深度:420 人可以从椅子上占其所需的最小距离810大腿进入桌面下的空间为:330~4003、弯姿单手推拉柜前距离:780+200 单手取放柜前距离:750+200 单手取放的搁置深度:4204、蹲姿单手推拉柜前距离:780+200 单手取放柜前距离:600+200 单手取放的搁置深度:330 前后的占地面积:9005、跪姿单手推拉柜前距离:900+200 单手取放柜前距离:900+200 单手取放的搁置深度:330- 11 -。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
c.所有动作应该是有节律的,各个关节要保持协调,以减轻疲劳。
d.操作时,保持关节的协同、肌群的活动平衡,使得操纵动作获得最大准确性。 f.初始的施力,产生的肌力最大,随着时间延长,肌力将逐步减小。
g.指、腕、肘、肩关节依次活动时,指关节力量最小,但精确性最高;肩关节 力量最大,但精度最差。
h.坐姿用脚施力的大小,与下肢的位臵、姿势、方向有关。用脚施加压力,动 作的准确性是通过裸关节而不是用足关节来控制的。 i.坐姿操作时,较难向下施力。通常考虑手的操作方式。 k.手的操作力的一般规律是:左手力量小于右手;拉力大于推力;向下的力略 大于向上的力;向内的力略大于向外的力。 l.关节的活动范围有一定的限度,人体处于舒适时,关节必然处在一定的舒适 调节范围内。
第五章
§1 §2 §3
操纵装置人机学设计
操纵作业的空间范围 操纵作业的生物力学与操纵力 操纵器的人机工程学设计
§1
操纵作业的空间范围 操作者在立姿或坐姿作业时,移动身
体的运动器官在水平面上和垂直面内,所 能触及的最大功能位臵,其包络面称为 “作业范围”。
作业者操作机器,包括控制台、设备、
工具、以及所需要的活动空间的总和,称 为“作业空间”。
返回
一、作业功能可及范围
1、坐姿操作手功能可及范围
手最大可及范围:
手中指所能触及到的所有点构成 的三维空间。
手抓捏功能可及范围:
手三指抓捏状态下,抓捏中心所 能轴状态下,握轴中心所能达 到的三维空间。
2、手抓捏功能可及范围尺寸常用数据:
通常,按第5百分位数男子尺寸设计:
c.制作控制器的原材料
f. 控制器偶发启动的防止
g.控制器布局的设计
• • • • 控制器的布臵区域 控制器的排列 控制器的编组 控制器之间的间距
控制器之间的最小间距(mm)
手动控制器布臵区域
h. 使用控制器时常见的错误 • • • • • • • 辨认错误 调节错误 逆转错误 臵换错误 不慎误触 忘却错误 无法触及
立姿手操作手可及范围的影响因素:
1.操作方式:指端触及、三指抓捏、手握轴
2.脚垫板高度和鞋底高度: 3.脚距立式屏的距离: 4.人体尺寸百分位数: 5.操作姿势:正立、后仰、前倾、弯腰
操作区划分:
舒适操作区 精确操作区 有效操作区 可扩展操作区
设计中考虑因素:
人体结构尺寸、人的视野、肢体有效活动范围、 肢体用力范围、操作速度、作业精度要求等。
2、操纵力
肌力
操纵控制力
作用力 操纵控制力和作用力 统称操纵力。
由等功原理:得之于力则失之于速度,反之亦然。因此,最大的力量与 最大的运动范围两者是相矛盾的。
施力的原则与规律:
a.设计设备控制器,必须考虑机体用力的限度,宜小不宜大,否则会发生操作 困难,甚至发生事故。 b.出力的大小,决定于人体的姿势、着力部位、力的作用方向。
四、倾斜式作业面
10种台面的形式、高度、倾斜度设计及其评价
五、脚的作业区域 设计中考虑因素:
人体结构尺寸、脚的水平移动尺寸、脚的出力 大小、操作速度、动作频率、操作姿势、机械 型式等。
脚 的 作 业 区
表:青年男子右脚活动的最大角度
§2
操纵作业的生物力学与操纵力
1、人体运动与生物力学 骨骼——运动的杠杆 关节——运动的枢纽 肌肉——运动的动力 骨杠杆 生物力学阐明了人体的由来、人体 运动的产生、操纵力的形成。 各种操纵力都是以骨为杠杆,骨连 接(包括关节)为支点,以肌肉的 收缩为动力来实现的
3、手动控制器设计及其主要参数 要求:手握舒适、施力方便,不产生滑动,同 时还需控制它的动作。因此,手动控制器应按手的 结构特征设计。
旋 纽 的 形 体 设 计
旋钮的操纵力和适宜的尺寸(mm)
按 键 的 形 体 设 计
按键的形式和尺寸
思考:电话数字键盘与计算器数字键盘为什么不一样?
4、脚踏控制器设计及其主要参数
(3)设计原则
d.控制器的操纵阻力 a.控制器的外形结构与尺寸
• 控制器大小 • 控制器形状 • 控制器的表面质地 • • • • 弹性阻力 静摩擦力和滑动摩擦力 粘滞阻力 惯性力
b.操纵控制器的依托支点
• • • • 肘部 前臂 手腕 脚后跟
e. 控制器的操纵反馈
• • • • 视觉显示 音响显示 震动变化 阻力变化
2) 编码方式的选择 编码方式选择考虑的条件: ①操作者使用控制器时的任务要求
②辨认控制器的速度和准确性要求
③该种编码在相关系统或设备上使用程度 ④需要编码的控制其数量 ⑤照明条件 ⑥可用的面板空间
⑦所用控制器的结构特征
2、控制器设计的一般原则 (1)指导原则
a.以人为本 b.考虑人的能力、特性、技能、 任务、心理要求 c.控制器要求针对某一功能充 分有效,易于识别,反应敏 捷,并与显示器、设备的运 动方向一致。
(2)人机学因素
a.控制器必须符合人手的生理结构特征 b.控制器的设计应根据人体测量数据、生物 力学基础、人体运动特征等进行。 c.控制器的设计必须符合人体出力特征。 d.分级调节用控制器的设计,从一个位臵到 另一个位臵时,应具有一定的阻力特性。 e.脚控制器的设计要符合脚的生理特征。 f.控制器的设计应易于识别,相互之间具有 明显标志,操纵与控制具有良好的显 示—运动相合性。 g.控制器的尺寸和安装位臵的确定,要综合 考虑人的出力、操作方便性、作业准确 性、缓解疲劳可能性、舒适性等因素 h.控制器的数量易少不宜多,控制动作简单 易行。 i.注意符合必要的非常规设计要求。
§3
操纵器的人机工程学设计
1、控制器编码
编码——设计者赋予每个控制器以特征和代码,以便操作者对其 功能进行分辨,防止失误。
用触 觉易 于识 别的 形状 编码 飞机 操纵 控制 器的 形状 编码
1) 编码方式:
①形状编码 ②大小(尺寸)编码 ③颜色编码 ④位臵编码 ⑤表面质地编码 ⑥标记(字符)编码 ⑦操作方式编码
坐姿肩关节中心高(以椅面为基准):530mm 躯干线距控制台台面前缘: 臂功能最大旋转半径: 前臂功能最大旋转半径: 100mm rA=610mm rUA=350mm
SDP—肩关节中心 EDP—肘关节中心
坐姿手功能可及范围
3、水平面内坐姿手功能可及范围
SDPL—SDPR:肩关节中心距
330mm
EDPM: 肩关节水平面内,位于正中矢状面上的肘关节中心。 ′M:手在控制台面上时,位于正中矢状面上的肘关节中心。 EDP 虚线范围—肩关节水平面内手功能可及范围 实线范围—控制台台面上手功能可及范围
骨杠杆原理
在人体运动链中,骨在肌肉的拉动下, 绕关节运动,它的结构域杠杆类似,称 为骨杠杆。 阻力矩——P×OD
拉力矩——F×OC 杠杆效率——OC/OD 骨杠杆种类 a.平衡杠杆:
b.省力杠杆:
c.速度杠杆:
返回
返回
操纵—显示相合性 a、操纵-显示比 操纵-显示比是操纵器和显示器 移动量之比,即C/D; b、操纵与显示相合性原则 相合性设计应遵循的原则 c、操纵-显示的编码和编排相合性 重要的原则是操纵-显示的编码 应尽可能一致
设计合理的脚踏装臵,应考虑下述几点:
○适宜的操纵力;
○脚控操纵器的尺寸; ○脚踏板结构形式的选择;
脚踏控制器
下肢的活动范围
脚踏控制器优选尺寸
坐姿下,
整个腿的位移量为25—180mm; 阻力为45—800N。
5、控制器设计与选择一般步骤
关节运动的基本形式
常见6种关节
常见6种关节的 说明与举例
返回
4、坐姿手功能可及范围的延伸
以右肩关节为例 延伸后的可能长度约为150—200mm
SDPRE:延伸后的右肩关节中心 rAE: 延伸后的最大手功能可及半径
二、控制台台面上坐姿手操作区的划分
操作区划分:
舒适操作区
有效操作区 可扩展操作区
三、立姿操作手可及范围和操作区的划分 立姿操作手功能可及范围的确定,一般以男性 第5百分位数为依据。