控制理论基础课后习题答案
现代控制理论第版课后习题答案
习题答案Document number : WTWYT-WYWY-BTGTT-YTTYU-2018GT《现代控制理论参考答案》第一章答案1-1试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下:系统的状态方程如下:令0(s) = y,则,=册所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。
以电压"⑴为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻R?上的电压作为输出量的输出方程。
解:由图,令ii =x}J2 =x2,u c =x3l输出量y = R2X2• & 1 1Rg + L, Xj + x y = u有电路原理可知:L2XI+R2X2=X3= x2 +C x3写成矢量矩阵形式为:14两输入也,两输出比,比的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示:1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令x, = y,吃=,,兀3 =,,则有相应的模拟结构图如下:并画岀相应的模拟结构图10 £初・ 117/ \ 6(5 + 1) -4 V 3 a解:VV (5)= ------ ---------- = --------- +— + ------------+ 丄s(s + 2)(s + 3y (s + 3y 5 + 3 s + 2 s1- 7给定下列状态空间表达式y = [0 0 1 x 2_V 3_(1) 画出其模拟结构图 (2) 求系统的传递函数解:-1 0(2) W(s) = (s/ — A)= 25 + 31 — 1 5 + 31-8求下列矩阵的特征矢量_0 1 0 _ (3)32-12 -7 -6-1 0解:A 的特征方程 |刀—A|= —3 2-2 =23+6/l 2 + lU + 6 = 0 1272 + 6解之得:入=—1,/?2 = —2,/?3 = —31-6 (2)已知系统传递函数W(s)=6(5 + 1)5(5 +2)(5+ 3)2,试求岀系统的约旦标准型的实现,■ 010 '/AiP113 0 2 P11 =— P21 -12 -7 -6_ ■皿■叽当人=一1时,令內=1Ai-1 (或令Pll =一1,得片=P21 =1 )1■ 0 1 0 ■P\2Pn 3 02 Pll =-2 P22-12 -7 _6. L/^2.解得:”22=一2卩2丿32 =>12'P22 =P\2(或令从2 T,得4 = "22“320 1当人=一3时, 3 0 -12 -71 -2£ 2解得:〃23=-3/心〃33=3门3令戸3 = 1得1・9将下列状态空间表达式化成约旦标准型(并联分解)~4 1 -2■3 fX 2 = 1 0 2X 2 + 2 7⑵-.1-1 d_5 3_得解得:P 2] =^31 =-P\\当人=一2时,令门2 = 2 得P 2 = 2 -41'4 1 -2'当人=3时, 1 02=3 "211 -13 .解之得 Pl2 = P12 + 1,P22 = “32 令 Pl2 =1并联联结(第3版教材)已知如图1・22所示的系统,其中子系统1、2的传递函数阵分别求系统的闭环传递函数_4 1 -2 P11PwT 1 0 2 "21 =3 P21 + 11 -1 3 -■叽丄 当An =3时,解:A 的特征方程2-4 -1 |27 - A| = -12 -1 1 2-2 =(2-1)(2-3)2 =02- 3解之得 P2! =Pj] =P11令/“iPw■fP21 = 1■叽丄当人=1时, 解之得 P13 = °,“23 = 2^33 令 “33 = 1约旦标准型1- 10已知两系统的传递函数分别为W|(s)和W 2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果 解: (D 串联联结MlR = 得10 -1得1-H (第2版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:M2已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数I】的系数b(即控制列阵)为⑴b=;解法1 :解法2 :求T,使得厂,;得宀鳥所以T=所以,状态空间表达式为第二章习题答案2-4用三种方法计算以下矩阵指数函数屛‘。
现代控制理论课后题及答案
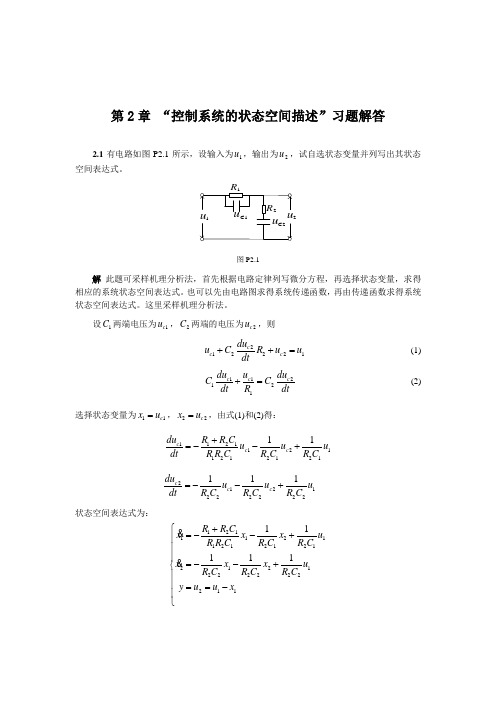
第2章 “控制系统的状态空间描述”习题解答2.1有电路如图P2.1所示,设输入为1u ,输出为2u ,试自选状态变量并列写出其状态空间表达式。
图P2.1解 此题可采样机理分析法,首先根据电路定律列写微分方程,再选择状态变量,求得相应的系统状态空间表达式。
也可以先由电路图求得系统传递函数,再由传递函数求得系统状态空间表达式。
这里采样机理分析法。
设1C 两端电压为1c u ,2C 两端的电压为2c u ,则212221c c c du u C R u u dt++= (1) 112121c c c du u duC C dt R dt+= (2) 选择状态变量为11c x u =,22c x u =,由式(1)和(2)得:1121121121212111c c c du R R C u u u dt R R C R C R C +=--+ 2121222222111c c c du u u u dt R C R C R C =--+ 状态空间表达式为:12111211212121212122222221111111R R C x x x u R R C R C R C x x x u R C R C R C y u u x +⎧=--+⎪⎪⎪=--+⎨⎪⎪==-⎪⎩即: 12121121211112222222211111R R C R C R R C R C x x u x x R C R C R C +⎡⎤⎡⎤-⎢⎥⎢⎥⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦--⎢⎥⎢⎥⎣⎦⎣⎦[]11210x y u x ⎡⎤=-+⎢⎥⎣⎦2.2 建立图P22所示系统的状态空间表达式。
1图P2.2解 这是一个物理系统,采用机理分析法求状态空间表达式会更为方便。
令()f t 为输入量,即u f =,1M ,2M 的位移量1y ,2y 为输出量, 选择状态变量1x =1y ,2x = 2y ,3x =1dy dt,24dyx dt =。
《现代控制理论》课后习题答案1.pdf

《现代控制理论》第一章习题解答1.1 线性定常系统和线性时变系统的区别何在? 答:线性系统的状态空间模型为:xAx Bu y Cx Du=+=+线性定常系统和线性时变系统的区别在于:对于线性定常系统,上述状态空间模型中的系数矩阵A ,B ,C 和中的各分量均为常数,而对线性时变系统,其系数矩阵D A ,B ,C 和中有时变的元素。
线性定常系统在物理上代表结构和参数都不随时间变化的一类系统,而线性时变系统的参数则随时间的变化而变化。
D 1.2 现代控制理论中的状态空间模型与经典控制理论中的传递函数有什么区别? 答: 传递函数模型与状态空间模型的主要区别如下:传递函数模型(经典控制理论)状态空间模型(现代控制理论) 仅适用于线性定常系统 适用于线性、非线性和时变系统用于系统的外部描述 用于系统的内部描述基于频域分析基于时域分析1.3 线性系统的状态空间模型有哪几种标准形式?它们分别具有什么特点?答: 线性系统的状态空间模型标准形式有能控标准型、能观标准型和对角线标准型。
对于阶传递函数n 1212101110()n n n n n n n b s b s b s b G s d s a s a s a −−−−−−++++=+++++"",分别有[]012101210100000100000101n n n xx ua a a a yb b b b x du−−−⎧⎡⎤⎪⎢⎥⎪⎢⎥⎪⎢⎥=+⎪⎢⎥⎨⎢⎥⎪⎢⎥⎪−−−−⎣⎦⎪=+⎪⎩"" ###%##"""⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⑴ 能控标准型:[]0011221100010********001n n n b a b a xa x ub a b y xdu −−−⎧−⎡⎤⎡⎤⎪⎢⎥⎢⎥−⎪⎢⎥⎢⎥⎪⎢⎥⎢⎥=−+⎪⎢⎥⎢⎥⎨⎢⎥⎢⎥⎪⎢⎥⎢⎥⎪−⎣⎦⎣⎦⎪=+⎪⎩"" "######""⑵ 能观标准型:[]1212001001001n n p p x x up y c c c x du⎧⎡⎤⎡⎤⎪⎢⎥⎢⎥⎪⎢⎥⎢⎥=+⎪⎢⎥⎢⎥⎨⎢⎥⎢⎥⎪⎣⎦⎣⎦⎪⎪=+⎩"" ##%##""⑶ 对角线标准型: 式中的和可由下式给出,12,,,n p p p "12,,,n c c c "12121012111012()n n n n n n n n nb s b s b s bc c c G sd d s a s a s a s p s p s p −−−−−−++++=+=++++++−−−"""++能控标准型的特点:状态矩阵的最后一行由传递函数的分母多项式系数确定,其余部分具有特定结构,输出矩阵依赖于分子多项式系数,输入矩阵中的元素除了最后一个元素是1外,其余全为0。
现代控制理论第版课后习题答案
现代控制理论第版课后习题答案Prepared on 22 November 2020《现代控制理论参考答案》第一章答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
解:系统的模拟结构图如下: 系统的状态方程如下: 令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:•••+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=•••写成矢量矩阵形式为:1-4 两输入1u ,2u ,两输出1y ,2y 的系统,其模拟结构图如图1-30所示,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所示: 1-5系统的动态特性由下列微分方程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令..3.21y x y x y x ===,,,则有相应的模拟结构图如下: 1-6 (2)已知系统传递函数2)3)(2()1(6)(+++=s s s s s W ,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:ss s s s s s s s W 31233310)3(4)3)(2()1(6)(22++++-++-=+++= 1-7 给定下列状态空间表达式[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321321321100210311032010x x x y u x x x x x x ‘(1) 画出其模拟结构图 (2) 求系统的传递函数 解:(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+-+-=-=31103201)()(s s s A sI s W 1-8 求下列矩阵的特征矢量(3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=6712203010A 解:A 的特征方程 061166712230123=+++=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+---=-λλλλλλλA I 解之得:3,2,1321-=-=-=λλλ当11-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---3121113121116712203010p p p p p p 解得: 113121p p p -== 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P(或令111-=p ,得⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P ) 当21-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---32221232221226712203010p p p p p p 解得: 1232122221,2p p p p =-= 令212=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1423222122p p p P(或令112=p ,得⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=21213222122p p p P )当31-=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---33231333231336712203010p p p p p p 解得: 133313233,3p p p p =-= 令113=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3313323133p p p P1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡32121321321110021357213311201214x x x y y u x x x x x x解:A 的特征方程 0)3)(1(311212142=--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡------=-λλλλλλA I 当31=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--3121113121113311201214p p p p p p 解之得 113121p p p == 令111=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1113121111p p p P当32=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--1113311201214312111312111p p p p p p 解之得 32222212,1p p p p =+= 令112=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0013222122p p p P当13=λ时,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--332313332313311201214p p p p p p 解之得3323132,0p p p == 令133=p 得 ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=1203323133p p p P约旦标准型1-10 已知两系统的传递函数分别为W 1(s)和W 2(s)试求两子系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果 解:(1)串联联结 (2)并联联结1-11 (第3版教材)已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材) 已知如图1-22所示的系统,其中子系统1、2的传递函数阵分别为求系统的闭环传递函数 解:1-12 已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u 的系数b(即控制列阵)为(1)⎥⎦⎤⎢⎣⎡=11b解法1: 解法2:求T,使得⎥⎦⎤⎢⎣⎡=-111B T 得⎥⎦⎤⎢⎣⎡=-10111T 所以 ⎥⎦⎤⎢⎣⎡-=1011T 所以,状态空间表达式为第二章习题答案2-4 用三种方法计算以下矩阵指数函数At e 。
现代控制理论课后习题答案

现代控制理论课后习题答案第⼀章习题1.2求下列多项式矩阵()s D 和()s N 的两个不同的gcrd:()2223(),()1232s s s s s s s s s ??++== ? ?+-??D N 解:()()22232321s s s s s s s++ =++ ? ?D S N S ; ()3r 2,1,2E -:223381s s s s s s ??++ ?-- ? ???;()3r 2,3,3E :223051s s s s s ??++ ?- ? ???;()3r 1,3,2E s --:01051s s ?? ?- ? ;()3r 2,1,5E s -:01001s ?? ?;()3r 3,1,1E -:01000s ?? ? ? ???;()1r 2,3E :01000s ?? ? ? ???;()1r 1,2E :00100s ?? ?;所以⼀个gcrd 为001s ??;取任⼀单模矩阵预制相乘即可得另⼀个gcrd 。
1.9 求转移矩阵t A e (1)已知1141??=A ,根据拉⽒反变换求解转移矩阵tA e 。
(2) 已知412102113-?? ?= ? ?-??A ,根据C-H 有限项展开法求解转移矩阵t A e 。
解:(1)11()41s s s --??-= ?--??I A1110.50.50.250.2511(3)(1)(3)(1)13131()4141110.50.5(3)(1)(3)(1)(3)(1)3131s s s s s s s s s s s s s s s s s s s s s s s --+---+-+??-+-+ ? ?-=== ? ?---+ ?-+ ? ?-+-+-+-+?I A 3311330.5e 0.5e 0.25e 0.25e e ()e e 0.5e 0.5e t t t t t t tt t s ------??+-??=-= ??? ?-+?A L I A (2)由2412()12(1)(3)0113λλλλλλ--?? ?=--=--= ? ?--??A I -,得1,233,1λλ== 对1,23λ=,可以计算1,2()2rank λ=A I -,所以该特征值的⼏何重数为1。
自动控制理论第4版全套参考答案
第一章习题参考答案1-1多速电风扇的转速控制为开环控制。
家用空调器的温度控制为闭环控制。
1-2 设定温度为参考输入,室内温度为输出。
1-3 室温闭环控制系统由温度控制器、电加热装置、温度传感器等组成,其中温度控制器可设定希望达到的室温,作为闭环控制系统的参考输入,温度传感器测得的室温为反馈信号。
温度控制器比较参考输入和反馈信号,根据两者的偏差产生控制信号,作用于电加热装置。
1-4 当实际液面高度下降而低于给定液面高度h r ,产生一个正的偏差信号,控制器的控制作用使调节阀增加开度,使液面高度逼近给定液面高度。
第二章 习题参考答案2-1 (1)()()1453223++++=s s s s s R s C ; (2)()()1223+++=s s s ss R s C ; (3)()()1223+++=-s s s e s R s C s2-2 (1)单位脉冲响应t t e e t g 32121)(--+=;单位阶跃响应t t e e t h 3612132)(----=; (2)单位脉冲响应t e t g t 27s i n 72)(2-=;单位阶跃响应)21.127sin(7221)(2+-=-t e t h t 。
2-3 (1)极点3,1--,零点2-;(2) 极点11j ±-.2-4)2)(1()32(3)()(+++=s s s s R s C . 2-5 (a)()()1121211212212122112+++⋅+=+++=CS R R R R CS R R R R R R CS R R R CS R R s U s U ; (b)()()1)(12221112212121++++=s C R C R C R s C C R R s U s U 2-6 (a)()()RCsRCs s U s U 112+=;(b)()()141112+⋅-=Cs RR R s U s U ; (c)()()⎪⎭⎫⎝⎛+-=141112Cs R R R s U s U . 2-7 设激磁磁通f f i K =φ恒定()()()⎥⎦⎤⎢⎣⎡++++=Θφφπφm e a a a a m a C C f R s J R f L Js L s C s U s 2602. 2-8()()()φφφπφm A m e a a a a m A C K s C C f R i s J R f L i Js iL C K s R s C +⎪⎭⎫⎝⎛++++=26023.2-9 ()2.0084.01019.23-=⨯--d d u i .2-10 (2-6) 2-11(2-7)2-12 前向传递函数)(s G 改变、反馈通道传递函数)(s H 改变可引起闭环传递函数)()(s R s C 改变。
古典控制理论基础习题及答案

古典控制理论基础习题及答案古典控制理论基础习题详解⼀概述2-1-1 试⽐较开环控制系统和闭环控制系统的优缺点。
2-1-2试列举⼏个⽇常⽣活中的开环和闭环控制系统的例⼦,并说明其⼯作原理。
2-1-3 试判断下列微分⽅程所描述的系统属何种类型(线性、⾮线性;定常、时变)。
2-1-4 根据题2-1-1图所⽰的电Array动机速度控制系统⼯作原理图:(1)将a,b与c,d⽤线连接成负反馈系统;(2)画出系统⽅框图。
2-1-5 下图是⽔位控制系统的⽰意图,图中Q,2Q分别为进⽔流量和Array 1出⽔流量。
控制的⽬的是保持⽔位为⼀定的⾼度。
试说明该系统的⼯作原理并画出其⽅框图。
2-1-6 仓库⼤门⾃动控制系统如图所⽰,试分析系统的⼯作原理,绘制系统的⽅框图,指出各实际元件的功能及输⼊、输出量。
⼆控制系统的数学模型2-2-1 试建⽴下图所⽰各系统的微分⽅程并说明这些微分⽅程之间有什么特点,其中电压)(t u r 和位移)(t x r 为输⼊量;电压)(t u c 和位移)(t x c 为输出量;1,k k 和2k 为弹簧弹性系数;f 为阻尼系数。
2-2-3 ⼯业上常⽤孔板和差压变送器测量流体的流量。
通过孔板的流量Q 与孔板前后的试将流量⽅程线性化。
2-2-4 系统的微分⽅程组为:2-2-6 。
(a ) (b )(c )(d ) 题2-2-6图2-2-8 设线性系统结构图如题2-2-8图所⽰,试(1)画出系统的信号流图;(2)题2-2-10图2-2-11 系统微分⽅程如下:)(b )(a 题2-2-7图题2-2-12图三时域分析法2-3-1 若某系统,当零初始条件下的单位阶跃响应为t t e e t c --+-=21)(试求系统的传递函数和脉冲响应。
2-3-2 ⼆阶系统单位阶跃响应曲线如图所⽰,试确定系统开环传递函数。
设系统为单位负反馈式。
2-2-3 已知系统的结构图如图所⽰(1)当0=d k 时,求系统的阻尼⽐ξ,⽆阻尼振荡频率n ω和单位斜坡输⼊时的稳态误题2-3-2图.1差;(2)确定d k 以使707.0=ξ,并求此时当输⼊为单位斜坡函数时系统的稳态误差。
控制理论基础第二版部分习题答案

第二章2.1 求解下列微分方程2)dd2yy ddtt2+ddyy ddtt=ee4tt,初始条件yy(0)=2, yy(0)=0.解:首先对微分方程两边进行拉氏变换,得代数方程:ss2YY(ss)−ssyy(0)−yy(0)+ssyy(ss)−yy(0)=1ss−4代入初始条件yy(0)=2, yy(0)=0.ss2YY(ss)−ssyy(ss)=1ss−4+2ss+2YY(ss)=2ss+1ss(ss−4)(ss+1)YY(ss)=2ss+AA ss+BB(ss−4)+CC(ss+1)计算得到A=-0.25,B=0.05,C=0.2;YY(ss)=47ss+15(ss−4)+120(ss+1)拉氏反变换y(t)=1.75+0.05ee4tt+0.2ee−tt(t>0)3)dd2xx ddtt2+5ddxx ddtt+6xx=6,初始条件xx(0)=2,xx(0)=2.解:首先对微分方程两边进行拉氏变换,得代数方程:ss2XX(ss)−ssxx(0)−xx(0)+5ssxx(ss)−5xx(0)+6XX(ss)=6ssXX(ss)=2ss2+12ss+6ss(ss+2)(ss+3)=AA ss+BB ss+2+CC ss+3计算得到A=1,B=5,C=-4,拉氏反变换得到,x(t)=1+5ee−2tt−4ee−3tt(t>0)2.2.一阶微分方程组为4'103'20x yx y y+=−++=,已知(0)0,'(0)0,(0)5x x y===,求解(),()x t y t。
解:首先对微分方程两边进行拉氏变换,得代数方程组:4ssXX(ss)−4xx(0)+YY(ss)=10/s−XX(ss)+(3ss+2)YY(ss)=3yy(0)XX (ss )=15ss +20ss (2ss +1)(6ss +1)YY (ss )=60ss 2+10ss (2ss +1)(6ss +1)得到:XX (ss )=20ss +6.25ss +12�+−26.25ss +16�YY (ss )=10ss +12.5ss +12�+−17.5ss +16�x(t)=20+6.25ee −12�tt-26.25ee −16�tt (t>0)y(t)=10+12.5ee −12�tt-17.5ee −16�tt(t>0)2.3解:根据基尔霍夫定律写出电路方程: 如ii 1为分电流VV =(ii 1+ii 2)RR 1+LL 1dd (ii 1+ii 2)ddtt +ii 1RR 2+1CC 1�ii 1ddtt VV =(ii 1+ii 2)RR 1+LL 1dd (ii 1+ii 2)ddtt +LL 2ddii 2ddtt +1CC 2�ii 2ddttORVV =(ii 1+ii 2)RR 1+LL 1dd (ii 1+ii 2)ddtt +ii 1RR 2+1CC 1�ii 1ddttii 1RR 2+1CC 1�ii 1ddtt =LL 2ddii 2ddtt +1CC 2�ii 2ddtt如ii 1为总电流:VV =ii 1RR 1+LL 1ddii 1ddtt +LL 2ddii 2ddtt +1CC 2�ii 2ddttLL 2ddii 2ddtt+1CC 2∫ii 2ddtt )RR 2+1CC 1∫(ii 1−ii 2)ddtt2.5将滑阀节流扣流量方程Q c x ω=Q 是阀芯位移x v 和节流口压p 的函数,c 、w 分别为流量系数和滑阀面梯度,ρ为油的密度。