lenze调试步骤
《LENZE9400调试总结》

基于B车发舱伺服滑台的LENZE9400驱动器调试总结一、Application Parmeters1、设置传动比,“单击”,跳转如下画面。
传动比为11.378,需要化为整数2、设置电机基本参数,“单击”跳转如下画面1)、根据电机类型,选择电机类型。
此处选择伺服异步电机 2)、“单击”,设置电机参数,画面如下:123选择“From Driver ”,会自动获取电机基本参数 3) 、设置外围编码器的参数.“单击”,画面如下3.1)、编码器类型:此处选X8(绝对值编码器) 3.2)也选择绝对值编码213、根据齿轮大小,传动比。
设置相关参数。
“单击”,画面跳转如下1)、Feed constant: 传动轮转动一圈所走得距离。
本项目为527.1mm;根据齿轮数和齿间距可得出该值。
2)、Reference velocity: 计算所得的线速度。
可以设计的极限速度比较。
二者应该一样。
3)、Unit:选择单位mm4)、Motor reference speed :电机额定转速。
二、FB editor1 2 31、输入(控制字1W,定位模式速度值1W,速度模式速度值1W,目标位2W,定位模式加速度1W)以及一些常量1)、控制字。
PLC将控制字以整字的形式发给驱动器是,发的值是一一对应的,如发L#08,驱动器收到的就是L#08。
但是如果PLC将控制字以位的形式发给驱动器,则需要注意将高8位和低8位相反。
例如控制字PLC地址为QW40,则Q40.0对应驱动器bBit8,Q40.7对应bBit15;而Q41.0对应bBit0,Q41.7对应bBit7。
bBit0:SwitchOn 驱动器没有反馈Ready信号,则需要一直发此信号。
bBit1:预留bBit2:QSP 快停。
PLC发此信号,电机快速停止bBit3:速度模式正转bBit4:速度模式反转bBit5:预留bBit6:预留bBit7:故障复位(故障清楚)bBit8:预留 bBit9:预留 bBit10:预留bBit11:定位模式使能 ,走定位模式,必须发信号bBit12:定位模式启动 ,启动定位模式,在bBit11为真的前提下,电机开始运动。
GDC软件联机LENZE变频器及简单使用
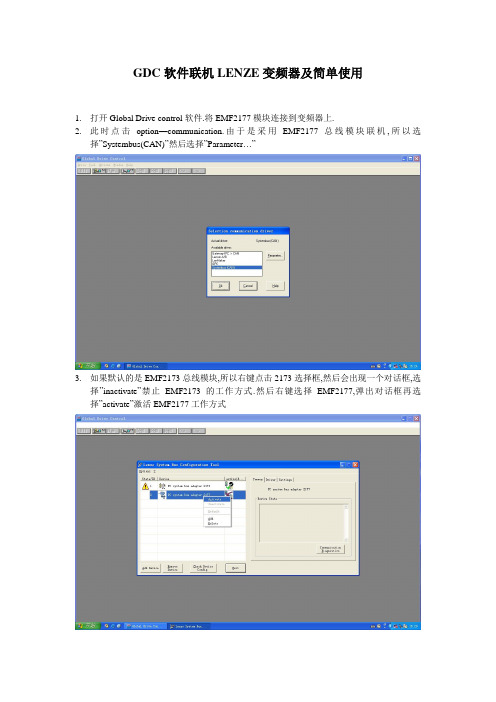
GDC软件联机LENZE变频器及简单使用1.打开Global Drive control软件.将EMF2177模块连接到变频器上.2.此时点击option—communication.由于是采用EMF2177总线模块联机,所以选择”Systembus(CAN)”然后选择”Parameter…”3.如果默认的是EMF2173总线模块,所以右键点击2173选择框,然后会出现一个对话框,选择”inactivate”禁止EMF2173的工作方式.然后右键选择EMF2177,弹出对话框再选择”activate”激活EMF2177工作方式4.通讯设置完成,点击Exit退出通讯设置.按F2,出现如下对话框,再按”search”搜索在线的驱动设备,并读取参数及数据5.数据读取完闭后,可以选择dialog diagnostics诊断在线驱动器,可以看到电流,电压,转矩温度等基本信息.还可以看到当前及历史报警信息,并可以在软件上按”trip reset”复位报警6.按F7或选择”drive parameters”---read actral parameter sets from drive将参数上传到电脑然后将当前读取的参数备份到电脑中,选择”drive parameters”---write all parameter sets to files7. 比较当前参数与备份参数选择”drive parameters”---compare actral parameter sets8.从PC中读取对应备份参数, 选择”drive parameters”---read all parameter sets from files9.然后按F5或选择”drive parameters”---write actrual parameter sets to drive将参数设定从PC 下载到变频器中。
LENZE_9300EP简明调试..

X4 X5
X6 X7 X8 X9
X10
9300交流伺服控制器的特点
支持多种通讯方式
键盘
PE
RDY IMP Imax Mmax Fail
现场总线模块 可插拔 可插拔
1250 rpm
MCTRL - N - ACT
S12 3
E1 E2 A1 A2
E1E2A1A2
9300EP功能及其应用
9300EP基本功能
内置位置控制器 32段可编程定位程序段 绝对和相对定位 灵活多样的寻零方式 与绝对值编码器配合可实现 断电位置记忆 点到点位置控制 目标位置的修正
v
平移速度 加速 目标位置 ( 路径) 减速
t
本节完
2、GDC软件综述
可接驳多种类型编码器: TTL-增量型 正弦波-增量型 正弦波-绝对值
信号形式:两通道差分正交 90° 输入频率响应:0 - 500 kHz 电流消耗:每通道 6 mA 可为编码器供电:5 - 8 V (可调)
Typ Id.-NR Fert.-Nr Serien-Nr. Eingang1 Eingang2
2、GDC软件综述
GDC程序可以“在线模式”和“离线模式”使用:
离线模式 可以在没有与目标系统(控制器)相连接条件下使用。该功能允许离线设 定参数、编程等工作。 在线模式 通过PC的串口、并口或系统总线实现GDC与目标系统(控制器)间的通讯。 该模式主要应用与目标系统的调试工作。
备注:
GDC首次安装完毕后,缺省通讯设置是COM2口;当安装时选择系统总线 时,CAN端口设定为500KB/参数通道为2。 如果你想利用其它通讯端口,你不得不在GDC通讯设定中进行设定。 你可以从GDC在线帮助中获取更多的消息
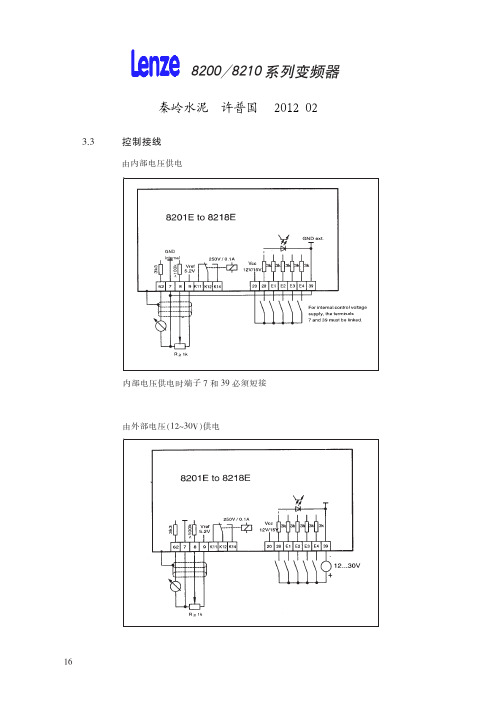
变频器操作说明书 Lenze i550 cabinet 0.25 - 132 kW

0.25 ...132 kW通用信息标识信息变频器的硬件概览Pe 继电器输出操作面板接口控制电缆屏蔽板It 螺丝变频器状态指示灯网络屏蔽接口,选件网络状态指示灯DIP PTC 输入诊断模块X1X109X3X105X20X2xx X9基本网络设置惯例在安装变频器之前请认真阅读该文档并遵守安全说明!为了方便概览,查阅相关产品文档。
按规定使用• • • • • • • 特定于设备的标准和指令• • • 通用信息标识概览惯例产品标识通用信息12信息概览惯例数字符号一般说来,例如:安全说明设计防止人身伤害或财产损失的安全说明。
表示极端危险的情况。
表示极端危险的情况。
表示极端危险的情况。
表示存在财物危险。
通用信息标识信息概览安全指导基本安全说明 忽略以下基本安全说明和安全信息可能会导致严重的人身伤害及财产损失!• • • • • • • • • • •残余危险残余危险用户必须在他/她的机器/系统的风险评估中考虑所提到的残余危险。
和财物损失!危险电压在运行过程中以及关闭电源后 20分钟内,对地泄漏电流(PE)>3.5mA AC或 >10mA DC。
可能的后果• 保护措施• • • • • 保护程度 - 人员和设备保护信息适用于已经安装和准备就绪的状态。
电机保护在某些变频器设置下,• • 产品请遵守产品上的警告标志!安全指导基本 安全说明技术数据标准和运行条件您可在项目规划文档中找到更多标准和运行条件。
机械安装重要注释 注释UL markingModular construction - A complete drive consists of a power unit series no. I5D in combination with a control unit series no. I5C only.Marquage ULConception modulaire – Le système d’d’准备尺寸和组件机械安装屏蔽连接板的安装屏蔽连接板与变频器一起固定在安装板上。
异步伺服电机 lenze手册
异步伺服电机 lenze手册异步伺服电机 Lenze 手册一、简介异步伺服电机 Lenze 是一种高精度、高可靠的驱动装置,采用细分技术和控制算法来提高驱动器的性能。
该手册旨在帮助用户了解如何正确配置和操作 Lenze 伺服电机。
二、安装和配置1. 安装前应仔细检查所有零部件,确保它们完好无损。
2. 根据电机名称板上的电气参数要求,正确连接电源、编码器和反馈接口。
3. 手动调整 PID 系数,设置速度和加速度。
4. 进行负载和机械系统的校准。
三、操作和维护1. 在使用前,检查驱动器是否安装牢固,连接是否稳定。
2. 遵守 Lenze 手册中的安全说明并正确使用 Lenze 驱动器。
3. 定期检查电机、电线、传感器和零部件的状态,并进行润滑和清洁。
4. 了解控制参数和硬件功能,并进行必要的设置和调整以确保最佳性能。
四、常见问题解决以下是一些可能会遇到的常见问题以及相应的解决方法:1. 马达处于震动状态:· 检查电源和电线是否正确连接。
· 检查传感器和编码器是否得到正确的信号。
· 调整 PID 系数和校准机械系统。
2. 编码器或反馈接口错误:· 检查连接是否正确。
· 检查传感器和编码器是否受损。
· 检查反馈信号是否得到正确的反馈。
3. 驱动器报警:· 检查手册中的驱动器报警代码并采取相应的措施。
· 在重复出现故障时,请联系服务部门。
五、结论异步伺服电机 Lenze 是一种高品质的驱动器,适用于实现高精度定位和运动控制。
要确保最佳性能,用户应遵循本手册中的建议,以正确地安装、配置、操作和维护驱动器。
雷尼召调试方法
李工:您好!圆光栅调试步骤:1.先用千分表测量圆光栅的同心度,椭圆度!千分表表针,测圆光栅外侧上沿或者下沿,切勿放置圆光栅外侧中间,圆光栅外侧中间,刻有刻线,以防破坏!2.安装读数头于圆光栅外侧,读数头圆光栅之间是非接触式,间距0.8MM,这个间距调好了,读数头上的指示灯为绿色!0.8mm的间距过大,或者过小,读数头上的指示灯都会变红色!必须是,读数头与圆光栅相对旋转一周,读数头上的指示灯都是绿色,为OK!3.调整细分盒调试:软开关细分盒的调试有两种办法:第1种:使用软件监控,整个过程的好坏!第2种:手动调试这里主要说明一下手动调试的过程:(1)第一步,用工具按住分盒软开关,断电!按住软开关重新上电,这时细分盒上的指示灯,OPT、SIG、REF、LMT所有的等都会全亮。
(2)如果读数头安装的间距正确,读数头指示灯为绿色的话,这时细分盒上第1个灯OPT应该为蓝色,OPT的灯是用来判断,圆光栅与读数头的安装好坏!(3)接下来,第2个指示灯,SIG是用来判断细分盒输出信号覆盖的多少?即信号输出的好坏,这个灯必须,是保证在第一个灯的基础上,才能实现。
这个灯调好的话,应为绿色!(4)第3个灯,REF这个是零位指示灯,在前面2的指示灯没问题的情况下,需要做一次,零位校准!轻轻按一下细分盒上的软开关,这时软开关指示灯单闪,需要转台圆光栅顺1个方向旋转,当读数头通过圆光栅第1个零位刻线时,软开开指示灯,变为双闪,过一会大概几十秒之后,软开关指示灯自动熄灭!这时零位校准就完成了!按住软开关指示灯2-3分钟,指示软开关指示灯常亮,表示自动增益打开!这次校准就OK! 之后,读数头每次过次零位刻线,REF的灯都闪橙色!(5)LMT为限位指示灯,一般圆光栅没有配置限位,这个指示灯就不用管它!前3个灯调好,基本就没有多大问题!。
LENZE8200简明调试及典型接线
,(00 D11 D1/ D1&
f/02Lij8 # kl " f/0mn8 f/02Lio8 # kl " h g
,(10 )*#,
)*&+
r8& D11 $D1/$D1& /stp 100 u $ vwxyz{|P $ }~ 8 & E@FGH / %
!"
+)
+),)
,&’(),BCDEFGHIJ #KLMN,6OPQRSTUVWXYZ? $
! .-(( [\]^_‘ ! ! !
abc .-(( 0 .-,( 4$%defg]^ $ hijklm #.-(( n .-,( [\ ]^l’of Z?p’ qr_stu,6EF4$%./
vKL6wx # yz){|}~P $ }~P & e +1.(123 l 4$% $
!"
#$5(!
56 56
uM B vwxXyz{|}~v C MX{|} $ ]^
R "ST5UV0WXY #$0%D Z[ $ \]^ %_‘a[bcC ! V* #%$&E/%/
-./012 !3
,&, @A $4’&55 DE*+,
@ABCHI @A $4’&55 *+8=
,4, @ABC $ DE*+,
@ABCHI @A 67*89 *+8=
,3, @A 67*89 DE*+,
@A 67*89 HI @A 67*89 *+8=
*’’%! 8=
*+
,’, JK63 ,;, L$M,NOPQRS=T ,%, L$U,NOPVR8=T ,3, L$U,NOPQ ! VR
LENZE_9300EP简明调试汇总

INTERBUS … 集成System Can通讯 CANopen PROFIBUS-DP DeviceNet Lecom-A/B (RS232/485) 9300伺服
9300伺服附件选项
制动模块9351和制动斩波单元9352
把机械制动能量转换成热能 支持标准、散热器外置和冷板型安装 可以多个并联使用 可适应不同的电源电压230 V, 400... and 480 V 符合CE, UL等认证
X6
X7 X8 X9 X10
9300伺服的接口定义
对外端口 旋转变压器反馈端口
旋转变压器反馈端口 X7 连接方式:Sub-D 9针
X4 X5 X6 X7 X8 X9 X10
ቤተ መጻሕፍቲ ባይዱ
Typ Id.-NR Fert.-Nr Serien-Nr. Eingang1 Eingang2
9300伺服的接口定义
对外端口 编码器反馈端口
对外端口 开关量端子
可自由定义的数字端子 (X5) 5 输入 (E1 - E5) (适于93ES系列)
X4 X5
4 输出 (A1 - A4)
可自由定义的模拟量端子 (X6) 2 差分输入 (11bit + 符号位 ) -10 V to +10 V 或 -20 mA to +20 mA 2 输出 (9bit + 符号位 ) -10 V to +10 V (2 mA)
9300ET 伺服PLC(可使用软件模板)
9300伺服基础知识
ES / EP / ER / EK 的内在区 别 在工艺功能层中: -EP -增加了 POS 功能块 -ER -增加了 RC 功能块 -EK -增加了CURVE、 CSEL 等功能块
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
LENZE8400HLC调试步骤
一、简单“定位”和“速度”调试,其中定位不带PRPFIBUS模块,定位直接由变频器内曲线给定,速度由模拟量直接给定。
从总体来说,可以分为:建立工程文件—选择电气元器件—设定编码器—定义程序FB块类型—定义曲线—定义端子—最后试车运行。
具体步骤如下:
打开工程文件::1.
2.打开一个空工程文件
3、工程命名:
4.设定工程文件保存位置:
5.选择变频器型号,注意软件版本,可从变频器上看出:
6.附件模块的选择,如PROFIBUS,CAN等,本章不含,直接进入,下一步:
7.选择控制模式:Table Positioning
8.电机、减速机的设定、选择。
注意,LENZE电机编码有时会在同一电机上面存在好几个编码,可按照实际电机接线和功能应用上选择合适的编码。
看不出电机编码的可以从功率范围内搜索和电机铭牌参数一致的电机:
9、进入程序主画面,设定电机机构相关参数,大齿轮转1圈为3600UNITS,精度°:
编码器设定:
注意:如果电机为非LENZE电机,则可按照以下步骤进行修改:
修改电机参数点击
可进入参数修改界面点击OK,
电机识别(会弹出上使能界面,点击使能就OK)
11、FB功能级别设定为:Free interconnection
12:旋转归零设定,注意归零模式的归零原点(Bhomemark)点系统默认为DI3,在画线路图之时也尽量选择DI3,归零原点的接入只可采用变频器的DI端子,不可用虚拟位启动(如PROFIBUS控制字的位)。
在设定系统原点上也可以通过MCKinterface-1功能块的bposset进行置位,但不可当成归零检测开关点,因为走任何曲线之时,当系统检测到这点,均会停车并将该点设置为零。
13、曲线设定,主要设定曲线的功能,速度模式(following)、归零模式(homing)、点动模式(manjog)、定位模式(position)。
在走定位之前,必须先归零,否则定位模式不会启动,曲线文件选择中有1、2、4、8,那么3#曲线的选择则为1、
2同时启动,1+2=3。
14:变频器的端子功能设定:
15:参数下载到变频器,注意的是。
在调试过程中,先另外备份参数,在修改
FB功能块时,有时即使没有保存参数到变频器,但变频器系统也会自动存入,
这和当初讲的.
只要不保存到变频器,断电后会恢复前次保存的内容有所区别,调试过程中,自己也可尝试一下保存功能。
在线修改参GO ONLINE下载参数
数完成后,
需要保存或` 重新下载,16、设定完成后,可手
动在如下编程面板上操作,也可直接通过PLC控制,在控制过否则变频器程中,监控运行状态按以下画面进行:重启后,数17:从监控画面中可直接观察相关
运行数据,观察是否和设定一致,下图为归零运行中的情况,选择曲线1(DI4),运行执行(DI7)、使能(PFR)均已经给定(从灯变绿可以看出),当系统碰到归零检测则会停止,并清零。
二、增加PROFIBUS通讯模块,使用PLC发位置和速度控制定位和曲线跟随。
注意通过PROFIBUS给定的信号均为无符号数字,故定位只能为正值,但在速度模式下,速度值由模拟量给定,有正负之分。
具体步骤见以下步骤:
变频器旋转位置接受设定,通过“MCK-interface”的“Peremeter”设定:
在”FB EDIRER”增加PROFIBUS的输入模块:
增加归零启停信号到PROFIBUS的第1个字的位1上。
给定速度、位置设定。
速度给定0-100—0-100%曲线设定速度(profile X :speed),位置单位°,位置值均需为正。
—》0-16384:
速度值的链接:
位置值的给定方法同上:
抱闸的控制
完成上面步骤,即可进行归零、定位和曲线跟随动作。
PROFIBUS输出(一般实际状态诸如实际转速、位置、电流等的输出)相关设定如下,也可参照帮助文档自行定义,。