第3章 图像变换2
第三章图像变换

(3.2 − 5)
能量 E(u) = F(u) = R2 (u) + I 2 (u)
相位
傅立叶变换中出现的变量u 通常称为频率变量。
(3.2 − 6)
(3.2 − 7)
I (u ) φ (u) = tan [ ] R(u )
−1
傅里叶变换
一个实函数的傅里叶变换通常是复数, 一个实函数的傅里叶变换通常是复数,即
这 里 f(x) 是 实 函 数 , 通 常 傅 立 叶 变 换 为 复 数 形 式 ( ) F(u)=R(u)+jI(u)。 ( 的实部 虚部、振幅、 的实部、 F(u)=R(u)+jI(u) 。 F(u)的实部、虚部 、振幅 、能量和相 位分别表示如下: 位分别表示如下: 欧拉公式: 欧拉公式:
正交变换广泛应用在图像增强、 图像恢复、 正交变换广泛应用在图像增强 、 图像恢复 、 特征提取、图像压缩编码和形状分析等方面。 特征提取、图像压缩编码和形状分析等方面。 在此,讨论常用的傅里叶变换。 在此,讨论常用的傅里叶变换。
重点内容
∗ 傅里叶变换的定义 ∗ 空间域频率域的理解 ∗ 离散傅里叶变换(DFT—Discrete Fourier 离散傅里叶变换(DFT— (DFT Transformation)的定义 的定义、 Transformation)的定义、性质和应用
e − j 2πux = cos 2πux − j sin 2πux (3.2 − 8)
实部
虚部
振幅
I (u) = −∫−∞ f (x) sin(2πux)dx
F (u ) = [ R 2 (u ) + I 2 (u )]
2
1 2
R(u) = ∫−∞ f (x) cos( πux)dx 2
宋怀波第6讲: 图像变换
第3章 图像变换
第 5页
3.2.1 傅立叶变换定义
频率域
– 由傅立叶变换和频率变量( u, v)定义的空间 – 基本性质(中心点平移后)
(1)变化最慢的频率成分(u=0, v=0)对应一幅图像的平均灰度 (2)低频(原点附近)对应图像灰度变化慢的像素 (3)高频(远离原点)对应图像灰度变化快的像素
第3章 图像变换
第12页
3.3 离散余弦变换
将源图像划分为若干个子块,每个子块包含8×8个像素
第3章 图像变换
第13页
3.3 离散余弦变换
8x8像素子块的DCT变换
第3章 图像变换 第14页
3.3 离散余弦变换
MATLAB中有两个二维离散变换函数: DCT2 反变换则为IDCT2
第3章 图像变换
第3章 图像变换
第32页
3.5.1 小波介绍——小波分析(续2)
CWT的变换过程示例,可分为5步 1.小波ψ (t)和原始信号f(t)的开始部 分进行比较 2.计算系数C——该部分信号与小 波的近似程度;C值越高表示信号
与小波相似程度越高
3.小波右移k得到的小波函数为ψ (tk) ,然后重复步骤1和2,……直到
第15页
3.3 离散余弦变换 Nhomakorabea例子: 离散余弦变换
1.变换系数由左上角开始减小 2.信息可用较少的系数表达, 编码的效率高
第3章 图像变换
第16页
3.4 沃尔什变换
例: 几种变换比较
原始图像 离散余弦变换
傅立叶变换 沃尔什变换
第3章 图像变换
第17页
第3章 图像变换
3.1 背景 3.2 傅立(里)叶变换和频率域
3.5.2 哈尔函数
《数字图像处理》习题参考答案
《数字图像处理》习题参考答案《数字图像处理》习题参考答案第1 章概述1.1 连续图像和数字图像如何相互转换?答:数字图像将图像看成是许多⼤⼩相同、形状⼀致的像素组成。
这样,数字图像可以⽤⼆维矩阵表⽰。
将⾃然界的图像通过光学系统成像并由电⼦器件或系统转化为模拟图像(连续图像)信号,再由模拟/数字转化器(ADC)得到原始的数字图像信号。
图像的数字化包括离散和量化两个主要步骤。
在空间将连续坐标过程称为离散化,⽽进⼀步将图像的幅度值(可能是灰度或⾊彩)整数化的过程称为量化。
1.2 采⽤数字图像处理有何优点?答:数字图像处理与光学等模拟⽅式相⽐具有以下鲜明的特点:1.具有数字信号处理技术共有的特点。
(1)处理精度⾼。
(2)重现性能好。
(3)灵活性⾼。
2.数字图像处理后的图像是供⼈观察和评价的,也可能作为机器视觉的预处理结果。
3.数字图像处理技术适⽤⾯宽。
4.数字图像处理技术综合性强。
1.3 数字图像处理主要包括哪些研究容?答:图像处理的任务是将客观世界的景象进⾏获取并转化为数字图像、进⾏增强、变换、编码、恢复、重建、编码和压缩、分割等处理,它将⼀幅图像转化为另⼀幅具有新的意义的图像。
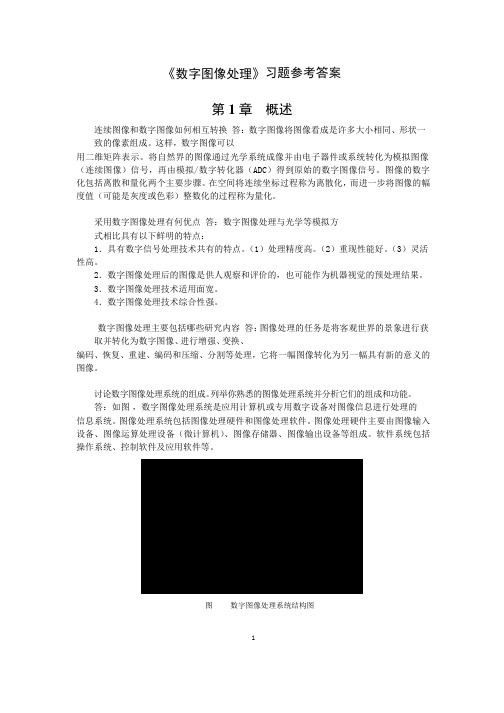
1.4 讨论数字图像处理系统的组成。
列举你熟悉的图像处理系统并分析它们的组成和功能。
答:如图1.8,数字图像处理系统是应⽤计算机或专⽤数字设备对图像信息进⾏处理的信息系统。
图像处理系统包括图像处理硬件和图像处理软件。
图像处理硬件主要由图像输⼊设备、图像运算处理设备(微计算机)、图像存储器、图像输出设备等组成。
软件系统包括操作系统、控制软件及应⽤软件等。
图1.8 数字图像处理系统结构图11.5 常见的数字图像处理开发⼯具有哪些?各有什么特点?答.⽬前图像处理系统开发的主流⼯具为 Visual C++(⾯向对象可视化集成⼯具)和 MATLAB 的图像处理⼯具箱(Image Processing Tool box)。
两种开发⼯具各有所长且有相互间的软件接⼝。
胡学龙《数字图像处理》课后习题答案

胡学龙《数字图像处理》课后习题答案胡学龙、许开宇编著《数字图像处理》思考题与习题参考答案第1章概述1.1 连续图像和数字图像如何相互转换?答:数字图像将图像看成是许多大小相同、形状一致的像素组成。
这样,数字图像可以用二维矩阵表示。
将自然界的图像通过光学系统成像并由电子器件或系统转化为模拟图像(连续图像)信号,再由模拟/数字转化器(ADC)得到原始的数字图像信号。
图像的数字化包括离散和量化两个主要步骤。
在空间将连续坐标过程称为离散化,而进一步将图像的幅度值(可能是灰度或色彩)整数化的过程称为量化。
1.2 采用数字图像处理有何优点?答:数字图像处理与光学等模拟方式相比具有以下鲜明的特点:1.具有数字信号处理技术共有的特点。
(1)处理精度高。
(2)重现性能好。
(3)灵活性高。
2.数字图像处理后的图像是供人观察和评价的,也可能作为机器视觉的预处理结果。
3.数字图像处理技术适用面宽。
4.数字图像处理技术综合性强。
1.3 数字图像处理主要包括哪些研究内容?答:图像处理的任务是将客观世界的景象进行获取并转化为数字图像、进行增强、变换、编码、恢复、重建、编码和压缩、分割等处理,它将一幅图像转化为另一幅具有新的意义的图像。
1.4 讨论数字图像处理系统的组成。
列举你熟悉的图像处理系统并分析它们的组成和功能。
答:如图1.8,数字图像处理系统是应用计算机或专用数字设备对图像信息进行处理的信息系统。
图像处理系统包括图像处理硬件和图像处理软件。
图像处理硬件主要由图像输入设备、图像运算处理设备(微计算机)、图像存储器、图像输出设备等组成。
软件系统包括操作系统、控制软件及应用软件等。
图1.8 数字图像处理系统结构图1.5 常见的数字图像处理开发工具有哪些?各有什么特点?答.目前图像处理系统开发的主流工具为Visual C++(面向对象可视化集成工具)和MATLAB的图像处理工具箱(Image Processing Tool box)。
第三章图像的几何变换ppt课件

a b
T
c d
需要使用2×3阶变换矩阵,取其形式为
1 0 x
T
0 1 y
此矩阵的第一、二列构成单位矩阵,第三列元素为平移常量。
精选PPT课件
6
所以需要在点的坐标列矩阵[x y]T中引入第三个元素,增
加一个附加坐标,扩展为3×1的列矩阵[x y 1]T,这样用三维
空间点(x, y, 1)表示二维空间点(x, y),即采用一种特殊的坐
I(x, y)=F(int(c1×x), int(c2×y))
其中
1
1
c1 k1 ,c2 k2
由此公式可以构造出新图像。
图像在缩小操作中,是在现有的信息里如何挑选所需要的有用信息。
精选PPT课件
22
其次讨论图像的比例放大:
在图像的放大操作中,则需要对尺寸放大后所多出来 的空格填入适当的像素值,这是信息的估计问题,所以较 图像的缩小要难一些。
a1 b1
H= 1 c1
O
a
y
c b
x
图3-2 齐次坐标的几何意义
精选PPT课件
10
3.1.3 二维图像几何变换的矩阵
利用齐次坐标改成3×3阶形式的变换矩阵,实现2D图像几何
变换的基本变换的一般过程是:
x0i 1、 将2×n阶的二维点集矩阵 表示成齐次坐标
y 0 i 2 n
2、然后乘以相应的变换矩阵即可完成。即
x
1
0
x
x0
y 0
1
y
y0
1
0
0
1
1
精选PPT课件
(3-2)
36
对变换矩阵求逆,可以得到式(3-2)的逆变换
数字图像处理 03图像变换(沃尔什变换)
6
数字图像处理讲义,2006,陈军波©中南民族大学
3.2.2 Walsh函数
WW (0,t) = 1 WW (1, t ) = R (1, t ) WW (2, t ) = R (2, t ) ⋅ R (1, t ) WW (3, t) = R (2, t)
W W ( 0 , t ) +1
-1 W W (1, t ) +1
t 1
WaWlsWh(序7,的t ) W= Ral(s3h,函t ) 数的特点: R(数1(1)的,是t )是完+-11偶备函的数正,交序函号数为,奇序数号1的为t是偶
WW (4,t) WW (5, t)
t 1 1t
R奇( 2函, t )数+1;可用于正交变换。 t
-1
1
WW (6,t)
1t
R(2(3),一t ) 个+1周期内,过零点数与序号
WW (0, t ) = R (3, t ) 0 ⋅ R ( 2, t ) 0 ⋅ R (1, t ) 0 = 1
5 101 111
WW (1, t ) = R (3, t ) 0 ⋅ R ( 2, t ) 0 ⋅ R (1, t )1 = R (1, t )
6 110 101 7 111 100
WW ( 2, t ) = R (3, t ) 0 ⋅ R ( 2, t )1 ⋅ R (1, t )1 = R ( 2, t ) ⋅ R (1, t )
WW (0,t) =1 WW (1,t) = R(1,t) WW (2,t) = R(2,t)⋅ R(1,t) WW (3,t) = R(2,t) WW (4,t) = R(3,t)⋅ R(2,t) WW (5,t) = R(3,t)⋅ R(2,t)⋅ R(1,t) WW (6,t) = R(3,t)⋅ R(1,t) WW (7,t) = R(3,t)
第3章图象变换

t0
其中
N 1
f (x) anun (x)
,则称函数U集合是完备的。
n0
离散情况
n个正交向量
a11
a1
a21
,
an1
a12
a2
a22
,
,
an
2
a1n
an
a
2n
ann
n
C i j
akiakj
k 1
0
i j
当C=1时,称归一化正交
a11 a12 a1n
N 1 N 1
F (u, v)
f ( x, y)au,v ( x, y)
x0 y0
N 1 N 1
f (x, y)
F (u, v)au*,v ( x, y)
u0 v0
0 u, v N 0 x, y N
正变换核
反变换核
变换核的可分离性
au,v (x, y) au (x)bv ( y) a(u, x)b(v, y)
1、一维离散傅立叶变换对
设离散函数f x为相应连续函数取N个间隔x的取样值。 f x f x0 xx
t0 T
C if m n
t0 um (t)un (t)dt 0 其它
当C=1时,称集合为归一化正交函数集合
正交函数集合的完备性
• 若f(x)是定义在t0和t0+T区间的实值信号, 平方可积。可以表示为:
f (x) anun (x)
n0
对任意小的ε>0,存在充分大的N,
t0 T
2
f (x) f (x) dx
其中{au(x), u=0,1,…,N-1}, {bv(y), v=0,1,…,N-1} 为一维完备正交基向量的集合。用矩阵表示:
数字图像处理习题参考答案
《数字图像处理》习题参考答案第1 章概述连续图像和数字图像如何相互转换答:数字图像将图像看成是许多大小相同、形状一致的像素组成。
这样,数字图像可以用二维矩阵表示。
将自然界的图像通过光学系统成像并由电子器件或系统转化为模拟图像(连续图像)信号,再由模拟/数字转化器(ADC)得到原始的数字图像信号。
图像的数字化包括离散和量化两个主要步骤。
在空间将连续坐标过程称为离散化,而进一步将图像的幅度值(可能是灰度或色彩)整数化的过程称为量化。
采用数字图像处理有何优点答:数字图像处理与光学等模拟方式相比具有以下鲜明的特点:1.具有数字信号处理技术共有的特点。
(1)处理精度高。
(2)重现性能好。
(3)灵活性高。
2.数字图像处理后的图像是供人观察和评价的,也可能作为机器视觉的预处理结果。
3.数字图像处理技术适用面宽。
4.数字图像处理技术综合性强。
数字图像处理主要包括哪些研究内容答:图像处理的任务是将客观世界的景象进行获取并转化为数字图像、进行增强、变换、编码、恢复、重建、编码和压缩、分割等处理,它将一幅图像转化为另一幅具有新的意义的图像。
讨论数字图像处理系统的组成。
列举你熟悉的图像处理系统并分析它们的组成和功能。
答:如图,数字图像处理系统是应用计算机或专用数字设备对图像信息进行处理的信息系统。
图像处理系统包括图像处理硬件和图像处理软件。
图像处理硬件主要由图像输入设备、图像运算处理设备(微计算机)、图像存储器、图像输出设备等组成。
软件系统包括操作系统、控制软件及应用软件等。
图数字图像处理系统结构图1常见的数字图像处理开发工具有哪些各有什么特点答.目前图像处理系统开发的主流工具为 Visual C++(面向对象可视化集成工具)和 MATLAB 的图像处理工具箱(Image Processing Tool box)。
两种开发工具各有所长且有相互间的软件接口。
Microsoft 公司的 VC++是一种具有高度综合性能的面向对象可视化集成工具,用它开发出来的 Win 32 程序有着运行速度快、可移植能力强等优点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.1.3 二维离散傅里叶变换的性质
• 卷积的复习
(1)卷积的定义
y(t ) x(t ) * h(t ) x( )h(t )d
3.1.3 二维离散傅里叶变换的性质
• 卷积的复习
(2)例题 :设x(t)与h(t)如图所示,求y(t)=x(t)*h(t)
即得到二维的变换结果。
3.1.3 二维离散傅里叶变换的性质
2.均值性
由二维傅里叶变换的定义:
1 M 1N 1 F (0,0) f ( x, y ) MN x 0 y 0
而,f ( x, y ) 1
f ( x, y ) MN
x 0 y 0
M 1 N 1
f ( x, y) F (0,0)
定义二维离散卷积:
f e ( x, y ) g e ( x, y )
M 1 N 1 m 0 n 0
f
e
(m, n ) g e ( x m, y n )
( x 0,1,2, M 1; y 0,1,2, N 1)
式中, f e ( x, y )与 g e ( x, y ) 分别是 f ( x, y )、g ( x, y )的周期化函数。
上式表明:只需一个周期里的变换就可将F(μ,ν) 在频域里 完全确定。
3.1.3 二维离散傅里叶变换的性质
4.平移性质
DFT平移特性如下:
[ f ( x x0 , y y0 )] F ( , )e
[ f ( x, y )e
j 2 (
j 2 (
x0 y0
M N
)
0 x 0 y
h (t )
1
x ( )
(2)
-2+t
1 2
0
t 1
h (t ) 1
x ( )
(3)
-2+t 2
1
0 1 t
3 1 t 时 2 1 1 3 3 y (t ) 1 (t )d t 2 4 16 2
• 卷积的复习
(4)
h (t ) 1 x ( )
3.1.3 二维离散傅里叶变换的性质
(5)二维离散函数卷积
即:
f ( x, y ), f e ( x, y ) 0 , g ( x, y ), g e ( x, y ) 0 , 0 x A 1; 0 y B 1 A x M 1; B y N 1 0 x C 1; 0 y D 1 C x M 1; D y N 1
引入极坐标 x=rcosθ, y=rsi F(μ,ν)转换为 f (r,θ)和 F(k,ф),将它们带入傅里叶变化 对:
[ f (r, 0 )] F[k , 0 ]
上式表明:对 f (x, y)旋转θ0 ,对应于其傅里叶变换 F(μ,ν)也旋转θ0。类似地,对F(μ,ν)旋转θ0也对应于其傅里 叶反变换旋转θ0。
M N
)
] F ( 0 , 0 )
第一个公式表明将F(μ,ν)与一个指数项相乘就相当 于把其变换后的空域中心移动到新的位置。
第二个公式表明将f (x, y)与一个指数项相乘就相当 于把其变换后的频域中心移动到新的位置。
3.1.3 二维离散傅里叶变换的性质
4.平移性质
τ 0 t
τ 0 t
(3)卷积的物理意义(理论版) ③连续信号 x(t)输入,(可以看成许多δ 乘以不同系 数陆续作用)
y(t ) x( )h(t )d
3.1.3 二维离散傅里叶变换的性质
(4)二维连续函数卷积
对于连续二维函数f1(x,y)与函数f2(x,y),卷积定 义为:
3.1.3 二维离散傅里叶变换的性质
5.分配律
根据傅里叶变换的定义,可以得到:
[ f1 ( x, y ) f 2 ( x, y )] [ f1 ( x, y )] [ f 2 ( x, y )]
上式表明:傅里叶变换对加法满足分配律。但 对乘法则不满足:
[ f1 ( x, y) f 2 ( x, y)] [ f1 ( x, y)] [ f 2 ( x, y)]
第3章 图像变换
3.1 傅里叶变换
3.2 离散余弦变换
3.3 小波变换及其应用
3.1 傅里叶变换
3.1.1 一维傅里叶变换 3.1.2 二维离散傅里叶变换 3.1.3 二维离散傅里叶变换的性质 3.1.4 傅里叶变换在图像处理中的应用
3.1.3 二维离散傅里叶变换的性质
1.可分离性
图像尺寸为N×N的函数f (x,y)的DFT可以为如下形式:
j 2 1 N 1 j 2 N 1 N 1 N F (u, ) e f ( x, y)e N x 0 N y 0
x
y
1 e N x 0
N 1 j 2 x N
F ( x, )
F(x,ν)是沿着f (x,y) 的列方向所进行的傅里叶变换。然后再将 F(x,ν) 进行行方向的傅里叶变换。 上式说明:二维DFT可分离为一系列一维DFT
由以上公式可知:空间域中图像的平移不影响频谱幅度 (幅值不变),仅对应于频域的相移(只改变了相位谱 )
原图像
X轴平移图像
Y轴平移图像
3.1.3 二维离散傅里叶变换的性质
4.平移性质用途
方块图像
原点平移前的 频谱幅度图像
原点平移后的 频谱幅度图像
3.1.3 二维离散傅里叶变换的性质
4.平移性质用途
f1 ( x, y) * f 2 ( x, y)
f1 ( p, q) f 2 ( x p, y q)dpdq
3.1.3 二维离散傅里叶变换的性质
(5)二维离散函数卷积
设两个二维离散函数:
f ( x, y), g ( x, y), 0 x A 1; 0 x C 1; 0 y B 1 ( A B 个样本值) 0 y D 1 ( C D 个样本值)
1
第二个式子表明:对f (x, y)在空间尺度的放缩 导致其傅立叶变换F(μ,ν) 在频域尺度方面相反放缩。
3.1.3 二维离散傅里叶变换的性质
尺寸缩放实例
64×64 空 域 32×32 16×16
频 域
3.1.3 二维离散傅里叶变换的性质
尺寸缩放实例
3.1.3 二维离散傅里叶变换的性质
7.旋转性
旋转性实例
原始图像
空 域 旋转300 旋转450
频 域
3.1.3 二维离散傅里叶变换的性质
旋转性实例
3.1.3 二维离散傅里叶变换的性质
8.共轭对称性
如果 f (x, y) 是实函数,则它的傅里叶变换具有 共轭对称性:
F ( , ) F * (, )
F * ( , ) 为 F ( , ) 的复共轭。
上式说明:在原点的傅里叶变换即等于图像的 平均灰度值。
3.1.3 二维离散傅里叶变换的性质
均值性实例
3.1.3 二维离散傅里叶变换的性质
3.周期性
图像尺寸为M×N的函数 f (x, y)的DFT具有周期性:
F ( , ) F ( M , ) F ( , N ) F ( M , N )
x(t) 1
h(t) 1
解:
1 2
0
1
t
0
h ( )
2
t
反折:
-2 0
1
时移
-2+t t
h (t )
1 0
• 卷积的复习
h (t )
1
x ( )
(1)
-2+t t
1 2
0
1
1 t 时, y (t ) 0 2
1 t 1时, 2 t 1 t2 t 1 y(t ) 1 (t )d 2 4 4 16 2
0
1
3 2
2
3 t
• 卷积的复习
y(t ) x(t ) * h(t ) x( )h(t )d
(3)卷积的物理意义(通俗版)
• 老板命令干活,你却打台球,被发现,扇你一巴掌(输入信号,脉冲), 你脸上鼓起一个包,脸是系统,包是脸对巴掌的响应,假定你的脸是线性时 不变系统,老板总是打你脸同一位置,你的脸上总是会在相同的时间间隔内 鼓起来一个相同高度的包来。 • 老板每扇你一巴掌,你5分钟就消肿,如果老板忍无可忍,以0.5秒的间隔 不间断的扇你,第一次鼓起来的包还没消肿,第二个巴掌就来了,效果不断 叠加,鼓包效果就可以求和了; • 如果老板再狠一点,频率越来越高,求和就变成积分了。可以这样理解, 在这个过程中的某一固定的时刻,脸上的包的鼓起程度和之前每次打你都有 关!但是各次的贡献是不一样的,越早打的巴掌,贡献越小,所以这就是说, 某一时刻的输出是之前很多次输入乘以各自的衰减系数之后的叠加而形成某 一点的输出,然后再把不同时刻的输出点放在一起,形成一个函数,这就是 卷积,卷积之后的函数就是你脸上的包的大小随时间变化的函数。 x(τ)就是 第τ个巴掌的力度, h(t-τ) 就是第τ个巴掌在t时刻的作用程度,乘起来再叠加 就ok了,
9.傅里叶变换的卷积定理
对于连续和离散卷积都有下列定理成立:
[ f1 ( x, y ) * f 2 ( x, y )] F1 ( , ) F2 ( , )
[ f1 ( x, y ) f 2 ( x, y )] F1 ( , ) * F2 ( , )
卷积是空间域滤波和频域滤波之间的纽带
3 t3 2
t