adams约束与载荷的施加与修改
ADAMS约束和载荷施加与修改
凸轮副施加对话框
凸轮副施加参数设置 凸轮副类型
凸轮啮合 线类型
设置凸轮机构时应注意以下方面:
1) 使用足够多的点来定义曲线。 2) 尽可能使用封闭曲线。 3) 所定义的曲线应该包括凸轮运动的全部范围。 4) 避免将初始触点定义在曲线的接点附近。 5) 应避免曲底凸轮机构产生一个以上的触点。 6) 可以使用一条曲线定义多个接触约束。
一般点参数设置对话框
运动
名称
移动
点
参考 点
参数 设置
• 运动可以是与时间有关的位移、速度和加速 度。在默认状态下,运动的速度定义为常数。 用户可以自定义运动值
运动修改对话框
运动名称
连接名称 连接类型 运动方
式
运动参 数设置
公式编辑器
公式编辑器对话框
公式输入窗 口
编辑公式
实例:
运动速度大小为阶梯变化时
1.2、约束工具
• 有两种启动约束工具的方法: • 一种是在主工具箱中,选择连接工具集
图标或运动工具集图标,然后选择约束 工具。 • 另一种方法是在Build菜单中选择Joints 项,可显示连接对话框。 •
约束与运动工具集
常用约束工具
接触约束工具 运动约束工具
凸轮约束工具
状态参数 设置
1.3、常用运动副
第三讲 ADAMS约束和载荷 施加与修改
一、约束的施加与修改 二、载荷的施加与修改
1.1、约束的概述和分类
• ADAMS/View可以处理以下4种类型的约束: • 1) 常用运动副约束 • 2) 指定约束方向,即:限制某个运动方向 • 3) 接触约束,定义两构件在运动中发生接触时,
是怎样相互约束的。 • 4) 约束运动。
2章+4节+ADAMS约束力运动

ADAMS约束、力、运动
第二章 第4节 ADAMS后处理应用
• 本节将引导您按照上节学习的基本设计步骤,使用 ADAMS/View来加载约束、力、力矩和运动:
XMUT
第 2章 ADAMS约束力运动
1、在创建的机械模型中加载各种不同的约束、力、力矩 和运动,从而细化和深化模型; 2、通过模拟仿真模型在实际操作过程中的动作来测试所 建模型; 3、通过将模拟仿真结果与物理样机理论数据对照比较来 验证所设计的方案;
2015年2月2日星期一
ADAMS约束力运动
§2.4 ADAMS加载约束、力矩、运动 -2 ADAMS加载运动
3 加载轴线运动
XMUT
第 2章
可以是平移,也可以是旋转 有三种加载方法:1loc、2bod-1loc、2bod-2loc 设置运动速度
ADAMS约束力运动
演示
2015年2月2日星期一
§2.4 ADAMS加载约束、力矩、运动 -3 ADAMS加载力(矩)
1 加载力
XMUT
第 2章
Run-time Directions:动态方向 Space Fixed指空间固结,动态方向不变 React on Ground指反作用力在地面上
ADAMS约束力运动
Body Moving指随构件运动变化
可以设定力的大小,变化规律
2015年2月2日星期一
§2.4 ADAMS加载约束、力矩、运动 -3 ADAMS加载力(矩)
2015年2月2日星期一
§2.4 ADAMS加载约束、力矩、运动 -1 ADAMS加载约束
15 加载螺旋副
XMUT
第 2章 ADAMS约束力运动
① 螺旋副是圆柱副和构件之间通过螺旋产生相对运动的 连接约束,将旋转运动转化为直线运动。
ADAMS的简单教程(上)
Settings | Gravity
3: 环境介绍 H
16
3.2 ADAMS/View 视窗布置
ADAMS/View…
主工具箱
建模与仿真
单击鼠标右 键可打开其 它工具
控制工具箱 显示功能的 变更决定于 你在主工具 箱中所选取 的指令而具 有不同的画 面
标题
工作栅格
下拉菜单
坐标系 状态栏
坐标视窗
3: 环境介绍 H
17
3.3 ADAMS/View 2005 主工具箱
12 34 56
1 几何建模 4 运动副
78
9 10
5 颜色
11 12 13 14 15 16
2 测量 3 恢复/重做
6 驱动
2005版
7 移动
9 动态浏览 14 背景颜色
10 动态旋转 11 前后视图
• 零件的局部坐标系 也称零件坐标系。在建立零件的同时产生,随零件一起运动,它在全局坐 标系中的位置和方向决定了零件在全局坐标系中的位置和方向。
标记坐标系 可以把标记分为固定标记和浮动标记两类。固定标记相对零件静止,可用 于定义零件的形状、质心位置、作用与约束的位置与方向等。浮动标记相 对零件运动,某些情况下要借助浮动坐标系来定义作用与约束。
ADAMS/Insight
试验设计与分析模块 ADAMS/Engine Chain
ADAMS/Durability
耐久性分析模块
Accessory Drive Module
ADAMS/DMU Replay 数字化装配回放模块 ADAMS/Rail
接口模块
ADAMS/Pre(现改名为 Chassis)
基于ADAMS的一类载荷施加方法及其开发

基于 AD AMS的一类载荷施加方法 及其开发
倪进 峰 徐 , 诚。 ( . 京航 空航 天大学 , 苏 南京 2 0 1 ;. 1南 江 1 0 6 2 南京 理工 大学 , 苏 南京 2 0 9 ) 江 1 0 4
Th n ito e h d a d I s De e o me to e Ki d Lo d Ba e n ADAM S e I f c i n M t o n t v l p n fOn n a s d o l
摘 要 : 导 气 式 自动 武 器 为 研 究 对 象 , 其 加 载 以 对
二 次开发 平 厶[ 。在应 用 A DAMS对 导 气 式 自动 武器 进行 动力学 仿 真分 析 过程 中 , 涉及 到 样 机建 模 时 的载荷施 加 问题 。 由 于武器 本 身 工 作 的特 殊 性 ,
气孔 后 , 药气体 进 入 气室 , 动 活 塞 运 动 , 而 完 火 推 从
成整 个武器 自动 机 的运 动循环 [ 。 2 ] 12 导气 室 内火药气体 作 用力分 析 . 导 气 室 的结 构 如 图1 所示 , 据 布拉 文 经 验 公 根
Ke r s l a i r r ADAM S; o d i fi— y wo d : o d l a y; b l a nl c
ton i
O 引 言
虚拟样 机技 术作 为一 门新兴 的计算机 辅助 工程 技术 , 目前 已广泛 应用 于众 多机械 工程领域 , 包括 武
器 系统 的仿 真分 析 工 作 中。在对 火 炮 、 自动 武器 和
火箭 炮 等 武 器 的 发 射 动 力 学 分 析 中 , 泛 应 用 了 广
1 载荷 施 加 方 法
adams约束与载荷的施加与修改解析
上机实验三约束与载荷的施加与修改一、上机目的通过本次上机:1.掌握adams中旋转副、移动副、圆柱副、固定副等简单约束的施加和基本操作和绘制方法;2.掌握adams齿轮副、凸轮副等复杂约束的施加的操作和绘制方法;3.掌握adams运动约束的施加和基本操作和绘制方法;4.学会使用浮动菜单进行约束的修改操作。
5.掌握ADAMS载荷:单向力、单向力矩、组合力、组合力矩、混合力)、柔性力(弹簧力)等的施加和修改的基本操作和基本方法。
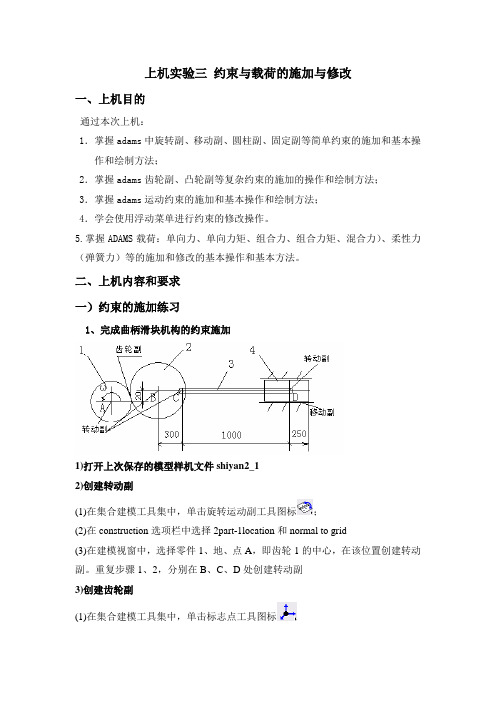
二、上机内容和要求一)约束的施加练习1、完成曲柄滑块机构的约束施加1)打开上次保存的模型样机文件shiyan2_12)创建转动副(1)在集合建模工具集中,单击旋转运动副工具图标;(2)在construction选项栏中选择2part-1location和normal to grid(3)在建模视窗中,选择零件1、地、点A,即齿轮1的中心,在该位置创建转动副。
重复步骤1、2,分别在B、C、D处创建转动副3)创建齿轮副(1)在集合建模工具集中,单击标志点工具图标(2)在主工具箱的选项栏中选择add to ground和global XZ(3)在建模视窗中,选择点(齿轮1与齿轮2)的交接附近,然后在该点创建标志点(4)在集合建模工具集中,单击齿轮运动副工具图标(5)在对话框中,鼠标放在选项栏join name中,点击右键——browse浏览约束,输入A、B处的铰链名;在velocity marker中,点击右键——browse浏览标志点,输入刚创建的标志点名,点击OK,实现创建齿轮副4)创建滑动副(1)在集合建模工具集中,单击滑动运动副工具图标;(2)在construction选项栏中选择2part-1location和pick feature(3)在建模视窗中,选择依次滑块4、地(4)选择点D下部某点作为移动副位置(5)移动鼠标使箭头水平,点击鼠标,生成移动副5)设置齿轮1的运动速度(1)在集合建模工具集中,单击旋转运动工具图标;(2)在speed文本框中输入60 r,定义转动速度为60rad/s(3)在建模视窗中,选择齿轮1上的转动副,创建运动约束6)修改约束(1)打开B 处的约束修改对话框:鼠标放在B上的铰链副joint上,单击右键—浮动菜单modify,打开运动修改对话框,使其约束由转动副变为圆柱副(2)打开齿轮1上的运动约束修改对话框,修改齿轮1的运动为往复运动:鼠标放在齿轮1上的运动副motion上,单击右键—浮动菜单modify,打开运动修改对话框,点击funcction(time)右侧的图标,打开编辑器对话框,在define a runtime function中输入:step(time,0,0,10,60)+step(time,10,60,20,-60)。
扭力梁后悬架Adams模型预载调节

根据帮助整理的:方法一:制作mnf文件时添加step1:用按ansys制作自由摸态的mnf文件(old.mnf)step2:用记事本制作预载荷文件(load.txt)格式如下:%PC 节点添加预载(初始值)1000 FX 1e5 1000号节点X向加100000N1001 FY -1e5%C 节点添加载荷(恒定值)1000 FX 1e5 1000号节点X向加100000N1001 FY -1e5%PM 模态添加预载10 1e5 1000号模态加100000N%M 模态添加载荷10 1e5 1000号模态加100000Nstep3:用命令行执行命令生成含有预载荷的mnf文件(new.mnf)格式如下:%mdi -c flextk mnfload old.mnf new.mnf load.txtstep4:用ADAMS定义modal force,选用funtion方法二:编写用户子程序添加step1:用fortran或C++写MFOSUB函数,生成ADAMS/solver的dll(详情参考论坛相关帖子)step2:用ADAMS定义modal force,选用subroutine,并输入函数参数和dll的路径(期待高手完善)补充例子如下:一根梁两端固定,中间某排节点添加向下的集中力方法一:制作mnf文件时添加step1:用按ansys制作自由摸态的mnf文件(old.mnf)命令流如下:/PREP7ET,1,SOLID95ET,2,MASS21R,1,1e-6,1e-6,1e-6,1e-6,1e-6,1e-6, MPTEMP,,,,,,,,MPTEMP,1,0MPDATA,EX,1,,2e11MPDATA,PRXY,1,,.3 MPTEMP,,,,,,,,MPTEMP,1,0MPDATA,DENS,1,,7800BLOCK,0,0.01,0,0.001,0,0.002,K,10001,0,0.0005,0.001K,10002,0.01,0.0005,0.001TYPE,1VSWEEP,1TYPE,2KMESH,10001KMESH,10002ASEL,S,,,5NSLA,S,1NSEL,A,,,818nplotCERIG,818,ALL,UXYZ,,,,allsel,allASEL,S,,,6NSLA,S,1NSEL,A,,,819nplotCERIG,819,ALL,UXYZ,,,,step2:用记事本制作预载荷文件(load.txt)文件内容如下:%C389 FY -100132 FY -100133 FY -100134 FY -100464 FY -100(注意上面的东西不能多也不能少,连回车和空格也不例外,否则导致生成失败)step3:用命令行执行命令生成含有预载荷的mnf文件(new.mnf)运行cmd.exe执行以下命令:adams05 flextk mnfload old.mnf mew.mnf load.txt执行完毕信息:E:\test\example_modal_force>adams05 flextk mnfload old.mnf new.mnf load.txtBegin execution of MSC Flex Toolkit (mnfload)...Title:Name : ct_tempType : ANSYS 11.0Comment 1:Comment 3:Exporting frequency range [-1.000000e+000,1.000000e+008] Creating a Modal Neutral File with the following information: Nodal Coords YesElement Faces YesEigenvalues YesMode Shapes YesGlobal Mass Properties YesNodal Masses YesNodal Inertias YesGeneralized Stiffness NoGeneralized Mass NoGeneralized Damping NoMode Transformation YesStress Modes YesInterface Nodes YesInertia Invariants NoModal Preload NoModal Loads YesStrain Modes YesNode info:Count: 819Global body properties:Mass : 0.000158Center of Mass: 0.005000 0.000506 0.000987Inertia Tensor: 0.000002 0.000000 0.0000000.000000 0.000002 0.0000000.000000 0.000000 0.000002Eigenvalue info:Modes: 18Trans Mode info:Modes: 18Nodes: 819Writing Mode ShapesNodal inertia info:Sparse matrix entries: 6Units:Mass: KILOGRAMLength: METERTime: SECONDForce: NEWTONNumber of Element Faces: 720Stress Mode info:Modes: 18Nodes: 240Strain Mode info:Modes: 18Nodes: 240step4:用ADAMS定义modal force,选用funtion分析结果。
2章 4节 ADAMS约束力运动
圆柱副(CYLINDER)、旋转副(REVOLUTE)
螺旋副(SCREW)、齿轮副等
2019年2月14日星期四
§2.4 ADAMS加载约束、力矩、运动 -1 ADAMS加载约束
高副约束
XMUT
第2章
曲线-曲线约束(CVCV) 点-曲线约束(PTCV)
2019年2月14日星期四
ADAMS约束力运动
§2.4 ADAMS加载约束、力矩、运动 -1 ADAMS加载约束
2 加载各种运动副
XMUT
第2章
现在已经可以熟练加铰链副,现在加载其它运动副。 圆柱副:顾名思义,只能加载到圆柱体和圆孔之间的配合 ① 首先建立一个带孔的构件
ADAMS约束力运动
② 再建立一个圆柱,圆柱半径与孔半径相当
③ 两个构件间、加载圆柱副
2019年2月14日星期四
§2.4 ADAMS加载约束、力矩、运动 -1 ADAMS加载约束
§2.4 ADAMS加载约束、力矩、运动 -1 ADAMS加载约束
11 平移副建模仿真练习
XMUT
第2章
平移副仿真练习一:曲柄滑块机构 平移副仿真练习二:P39(自己练习) 在书上的例子中,增加一个曲柄和与其垂直的连杆之间的 固定副,为什么?
2019年2月14日星期四
ADAMS约束力运动
§2.4 ADAMS加载约束、力矩、运动 -1 ADAMS加载约束
第二章 第4节
ADAMS约束、力、运动
第二章 第4节 ADAMS后处理应用
• 本节将引导您按照上节学习的基本设计步骤,使用 ADAMS/View来加载约束、力、力矩和运动:
XMUT
第2章 ADAMS约束力运动
1、在创建的机械模型中加载各种不同的约束、力、力矩 和运动,从而细化和深化模型; 2、通过模拟仿真模型在实际操作过程中的动作来测试所 建模型; 3、通过将模拟仿真结果与物理样机理论数据对照比较来 验证所设计的方案;
ADAMS约束问题讨论
·50· 计算机应用技术 机械 2007年第12期 总第34卷————————————————收稿日期:2007-08-27作者简介:喻涛(1980-),硕士研究生,主要研究方向为机械CAD/CAM 。
ADAMS 约束问题讨论喻涛,李文蔚(昆明理工大学,云南 昆明 650093)摘要:机构存在冗余约束时,ADAMS 会在计算时自动解除一些约束,从而使被解除约束的自由度上不会计算构件间的作用力。
冗余约束应在进行动力学分析前被手动解除,以获得更精确的结果数据。
关键词:ADAMS ;约束方程;冗余约束中图分类号:TH122 文献标识码:A 文章编号:1006-0316(2007)12-0050-02Discussion of constraint questions based on ADAMSYU Tao ,LI Wen-wei(Kunming University of Science and Technology ,Kunming 650093,China)Abstract :ADAMS will make some constraints invalid in the process of calculation automatically when redundant constraints exists in mechanism, then the joint reaction forces in any directions associated with redundant constraint equations will not be calculated .To gain most accurate date ,the redundant constraints should be eliminated by hand before dynamic analysis. Key words :ADAMS ;constraint equation ;redundant constraint虚拟样机分析软件ADAMS (Automatic Dynamic Analysis of Mechanical Systems ),目前己经被全世界各行各业的数百家主要制造商采用,ADAMS 软件能对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
上机实验三约束与载荷的施加与修改一、上机目的通过本次上机:1.掌握adams中旋转副、移动副、圆柱副、固定副等简单约束的施加和基本操作和绘制方法;2.掌握adams齿轮副、凸轮副等复杂约束的施加的操作和绘制方法;3.掌握adams运动约束的施加和基本操作和绘制方法;4.学会使用浮动菜单进行约束的修改操作。
5.掌握ADAMS载荷:单向力、单向力矩、组合力、组合力矩、混合力)、柔性力(弹簧力)等的施加和修改的基本操作和基本方法。
二、上机内容和要求一)约束的施加练习1、完成曲柄滑块机构的约束施加1)打开上次保存的模型样机文件shiyan2_12)创建转动副(1)在集合建模工具集中,单击旋转运动副工具图标;(2)在construction选项栏中选择2part-1location和normal to grid(3)在建模视窗中,选择零件1、地、点A,即齿轮1的中心,在该位置创建转动副。
重复步骤1、2,分别在B、C、D处创建转动副3)创建齿轮副(1)在集合建模工具集中,单击标志点工具图标(2)在主工具箱的选项栏中选择add to ground和global XZ(3)在建模视窗中,选择点(齿轮1与齿轮2)的交接附近,然后在该点创建标志点(4)在集合建模工具集中,单击齿轮运动副工具图标(5)在对话框中,鼠标放在选项栏join name中,点击右键——browse浏览约束,输入A、B处的铰链名;在velocity marker中,点击右键——browse浏览标志点,输入刚创建的标志点名,点击OK,实现创建齿轮副4)创建滑动副(1)在集合建模工具集中,单击滑动运动副工具图标;(2)在construction选项栏中选择2part-1location和pick feature(3)在建模视窗中,选择依次滑块4、地(4)选择点D下部某点作为移动副位置(5)移动鼠标使箭头水平,点击鼠标,生成移动副5)设置齿轮1的运动速度(1)在集合建模工具集中,单击旋转运动工具图标;(2)在speed文本框中输入60 r,定义转动速度为60rad/s(3)在建模视窗中,选择齿轮1上的转动副,创建运动约束6)修改约束(1)打开B 处的约束修改对话框:鼠标放在B上的铰链副joint上,单击右键—浮动菜单modify,打开运动修改对话框,使其约束由转动副变为圆柱副(2)打开齿轮1上的运动约束修改对话框,修改齿轮1的运动为往复运动:鼠标放在齿轮1上的运动副motion上,单击右键—浮动菜单modify,打开运动修改对话框,点击funcction(time)右侧的图标,打开编辑器对话框,在define a runtime function中输入:step(time,0,0,10,60)+step(time,10,60,20,-60)。
7)保存文件为shiyan3_1,在E:\jiben06\20063377目录中,退出adams/view 2、完成凸轮机构的约束施加(1)、打开上次保存的模型样机文件shiyan2_2(2)、创建转动副1)在集合建模工具集中,单击旋转运动副工具图标;2)在construction选项栏中选择2part-1location和nomal grid3)在建模视窗中,选择零件1、地,点A,即圆柱1的中心,在该位置创建转动副(3)、创建移动副1)在集合建模工具集中,单击滑动运动副工具图标;2)在construction选项栏中选择2part-1location和pick feature3)在建模视窗中,依次选择滑块2、支座4)选择点圆柱滑块轴线上一点作为运动副位置5)移动鼠标使箭头垂直,点击鼠标,生成移动副(4)、创建凸轮副1)在集合建模工具集中,单击点-线凸轮运动副工具图标;2)在选项栏point-curve中选择curse3)在建模视窗中,依次选择圆柱滑块顶点、齿轮1圆线,完成创建凸轮(5)、创建固定副1)在集合建模工具集中,单击锁工具图标;2)在construction选项栏中选择2part-1location和nomal grid3)在建模视窗中,依次选择支座、地,在某一位置点击右键完成支座的固定5、设置圆柱1的运动速度1)在集合建模工具集中,单击旋转运动工具图标;2)在speed文本框中输入80 r,定义转动速度为80rad/s3)在建模视窗中,选择圆柱1上的转动副,创建运动约束4)保存文件为shiyan3_2,在E:\jiben06\20063377目录中,退出adams/view 二)载荷的施加与修改练习1、按图示要求施加载荷1)施加驱动力(1)重新打开文件shiyan3_1,在主工具箱中,右键单击图标,打开下一级力工具集按钮,单击施加单向力矩工具图标;(2)在选项栏value中,选择constant输入值500N(3)在建模视窗中,依次选择圆柱1、A点,完成创建施加单向驱动力矩2)施加单向变力F(1)在主工具箱中,右键单击图标,打开下一级力工具集按钮,单击施加单向力工具图标;(2)在选项栏value中,选择custom(3)在建模视窗中,依次选择滑块、E点,完成创建施加单向力(4)把鼠标放在E点力附近,点击右键——modify打开修改力对话框,点击function 右侧的图标,打开编辑器对话框,在define a runtime function 中,定义力F(time,…)=(SIGN(1000,-VX(点)),点处输入力所在滑块上的一个标记,是力作用的I点。
I点复制方法:鼠标放在力F附近,点击右键,通过快捷菜单,选择FORCE_1——info ——拷贝其中I 标记点即可。
(5)单击ok,退出力修改对话框(6)保存文件shiyan3_3在E:\jiben06\20063377目录中,退出adams3)施加作用力(1)在主工具箱中,右键单击图标,打开下一级力工具集按钮,单击施加单向力工具图标;(2)在选项栏value中,选择constant输入值200N,construction中选择pick feature;(3)在建模视窗中,依次选择滑块、D点,完成创建施加单向作用力。
2、施加弹簧力弹簧的质量刚度系数为200N/s,阻尼系数C=30kg/s。
1)重新打开文件shiyan3_2,在集合建模工具集中,单击施加弹簧力工具图标;2)在选项栏中分别选中K、C,并输入K、C的值3)在建模视窗中,依次选择圆柱滑块底部中心点A、支座内B点,完成创建弹簧力4) 保存文件shiyan3_4在E:\jiben06\20063377目录中,退出adams三)练习起重机的建模和仿真,如下图所示。
1)启动ADAMS1. 运行ADAMS,选择create a new model;2. modal name 中命名为lift_mecha;3. 确认gravity 文本框中是earth normal (-global Y),units文本框中是MKS;ok4. 选择setting——working grid,在打开的参数设置中,设置size在X和Y方向均为20 m,spacing在X和Y方向均为1m;ok5. 通过缩放按钮,使窗口显示所有栅格,单击F4打开坐标窗口。
2)建模1. 查看左下角的坐标系为XY平面2. 选择setting——icons下的new size图标单位为13. 在工具图标中,选择实体建模按钮中的box 按钮4. 设置实体参数;On groundLength :12Height:4Depth:85. 鼠标点击屏幕上中心坐标处,建立基座部分6. 继续box建立Mount座架部件,设置参数:New partLength :3Height:3Depth: 3.5设置完毕,在基座右上角建立座架Mount部件7. 左键点击立体视角按钮,查看模型,座架Mount不在基座中间,调整座架到基座中间部位:①右键选择主工具箱中的position 按钮图标中的move 按钮②在打开的参数设置对话框中选择Vector,Distance项中输入3m,实现Mount 移至基座中间位置③设置完毕,选择座架实体,移动方向箭头按Z轴方向,Distance项中输入2.25m,完成座架的移动右键选择座架,在快捷菜单中选择rename,命名为Mount8. 选择setting—working grid 打开栅格设置对话框,在set location中,选择pick 选择Mount.cm座架质心,并选择X轴和Y轴方向,选择完毕,栅格位于座架中心选择主工具箱中的视角按钮,观察视图将spacing—working grid ,设置spacing中X和Y均为0.510. 选择圆柱实体绘图按钮,设置参数:New partLength:10mRadius:1m选择座架的中心点,点击左侧确定轴肩方向,建立轴肩,单击三维视图按钮,观察视图11. 继续圆柱工具,绘制悬臂①设置参数:New partLength: 13mRadius: 0.5m②选择Mount.cm作为创建点,方向同轴肩,建立悬臂③右键选择新建的悬臂,在快捷菜单中选择part_4——Rename,命名为boom④选择悬臂,移动方向沿X轴负向,实现悬臂的向左移动:1)右键选择工具箱中的position按钮中的move按钮2)在打开的参数对话框中,选择vector,distance中输入2m,点击悬臂,实现移动⑤右键点击实体建模按钮,在弹出的下一级菜单中选择导圆角工具,设置圆角半径为1.5m⑥左键选择座架上侧的两条边,点击右键,完成倒角12. 选择box 按钮图标,创建铲斗①设置参数:New partLength : 4.5Height: 3.0Depth: 4.0②选择悬臂左侧中心点,命名为bucket,建立铲斗③右键选择position 按钮下一级按钮move 按钮④在打开的参数对话框中,选择vector,distance中输入2.25m,选择铲斗,移动方向沿全部坐标系X轴负方向,实现铲斗的横向移动⑤在主工具箱中,选择三维视图按钮,察看铲斗⑥继续选择move按钮,设置参数中选择vector,distance中输入2.0m,选择铲斗,移动方向沿全部坐标系 Z轴负方向,实现铲斗的纵向移动⑦移动完毕,选择主工具箱中的渲染按钮render,察看三维实体效果,再次选择render按钮,实体图则以线框显示⑧右键点击实体建模按钮,再弹出的下一级按钮中选择倒角工具,在打开的参数设置对话框中,设置倒角Width为1.5m,⑨选择铲斗下侧的两条边,完毕单击右键,完成倒角⑩右键选择实体建模工具按钮,再下一级按钮中选择Hollow 按钮,在打开的参数设置对话框中设置参数Thickness为0.25m选择铲斗为挖空对象,铲斗上平面为工作平面,完毕点击右键挖空铲斗3)添加约束,根据图示关系,添加链接①在主工具箱中,选择转动副,下方的参数设置对话框中,设置参数2 bod ——1 loc和pick feature②选择基座和座架,然后选择座架中心Mount.cm,旋转轴沿y轴正向,建立座架与基座的转动副③继续用转动副按钮,建立轴肩与座架间的转动副,设置参数为2 bod——1 loc 和Normal to grid,选择轴肩和座架,再选择座架中心点,建立转动副④继续用转动副按钮,建立铲斗与悬臂间的转动副,设置参数为2 bod——1 loc 和Normal to grid,选择铲斗与悬臂,再选择铲斗下侧中心点,建立转动副⑤选择主工具箱中的平动副,设置参数2 bod——1 loc和pick feature,选择悬臂与轴肩,再选择悬臂中心标记点,移动方向沿X轴正方向,建立悬臂和轴肩间的平动副⑥右键点击窗口右下角的Information 信息按钮,选择约束按钮,观察是否按要求施加约束,关闭信息窗口⑦检查完毕,选择仿真按钮,对系统进行仿真,观察系统在重力作用下的运动4)添加运动①选择主工具箱中的旋转运动按钮,右键点击座架中心标记点,在弹出的选择窗口中,选择JOINT_mount_ground,给座驾与基座的转动副添加转动运动②选择俯视图按钮,观察旋转运动副的箭头图标③右键点击该运动,在弹出的快捷菜单中选择motion_mount_ground——modify在修改对话框中,修改function项为360d*time④重复上述动作,在轴肩和座架之间建立旋转运动Motion_shoulder_ground,⑤右键点击该运动,在弹出的快捷菜单中选择motion_shoulder_ground——modify在修改对话框中,修改function项为-STEP(time,0,0,0.10,30d)⑥重复上述动作,在铲斗和悬臂之间建立旋转运动Motion_bucket_boom⑦设置运动函数为45d*(1-cos(360d*time))⑧右键点击主工具箱中旋转运动按钮,选择下一级平行运动按钮,点击悬臂中心平动副,在悬臂和座架间建立平行运动⑨设置平行运动函数为STEP(time,0.8,0,1,5)⑩选择主工具箱中的仿真按钮,设置仿真参数END Time:1;Steps:100,进行仿真5)铲斗施加载荷(1)在主工具箱中,右键单击图标,打开下一级力工具集按钮,单击施加单向力工具图标;(2)在选项栏依次选择space fixed;constant输入值2000N,construction中选择pick feature;(3)在建模视窗中,依次选择铲斗、铲斗质点,箭头向下,完成创建施加铲斗单向作用力。