ADAMS约束和载荷施加与修改
ADAMS的简单教程(上)
Settings | Gravity
3: 环境介绍 H
16
3.2 ADAMS/View 视窗布置
ADAMS/View…
主工具箱
建模与仿真
单击鼠标右 键可打开其 它工具
控制工具箱 显示功能的 变更决定于 你在主工具 箱中所选取 的指令而具 有不同的画 面
标题
工作栅格
下拉菜单
坐标系 状态栏
坐标视窗
3: 环境介绍 H
17
3.3 ADAMS/View 2005 主工具箱
12 34 56
1 几何建模 4 运动副
78
9 10
5 颜色
11 12 13 14 15 16
2 测量 3 恢复/重做
6 驱动
2005版
7 移动
9 动态浏览 14 背景颜色
10 动态旋转 11 前后视图
• 零件的局部坐标系 也称零件坐标系。在建立零件的同时产生,随零件一起运动,它在全局坐 标系中的位置和方向决定了零件在全局坐标系中的位置和方向。
标记坐标系 可以把标记分为固定标记和浮动标记两类。固定标记相对零件静止,可用 于定义零件的形状、质心位置、作用与约束的位置与方向等。浮动标记相 对零件运动,某些情况下要借助浮动坐标系来定义作用与约束。
ADAMS/Insight
试验设计与分析模块 ADAMS/Engine Chain
ADAMS/Durability
耐久性分析模块
Accessory Drive Module
ADAMS/DMU Replay 数字化装配回放模块 ADAMS/Rail
接口模块
ADAMS/Pre(现改名为 Chassis)
基于ADAMS的一类载荷施加方法及其开发

基于 AD AMS的一类载荷施加方法 及其开发
倪进 峰 徐 , 诚。 ( . 京航 空航 天大学 , 苏 南京 2 0 1 ;. 1南 江 1 0 6 2 南京 理工 大学 , 苏 南京 2 0 9 ) 江 1 0 4
Th n ito e h d a d I s De e o me to e Ki d Lo d Ba e n ADAM S e I f c i n M t o n t v l p n fOn n a s d o l
摘 要 : 导 气 式 自动 武 器 为 研 究 对 象 , 其 加 载 以 对
二 次开发 平 厶[ 。在应 用 A DAMS对 导 气 式 自动 武器 进行 动力学 仿 真分 析 过程 中 , 涉及 到 样 机建 模 时 的载荷施 加 问题 。 由 于武器 本 身 工 作 的特 殊 性 ,
气孔 后 , 药气体 进 入 气室 , 动 活 塞 运 动 , 而 完 火 推 从
成整 个武器 自动 机 的运 动循环 [ 。 2 ] 12 导气 室 内火药气体 作 用力分 析 . 导 气 室 的结 构 如 图1 所示 , 据 布拉 文 经 验 公 根
Ke r s l a i r r ADAM S; o d i fi— y wo d : o d l a y; b l a nl c
ton i
O 引 言
虚拟样 机技 术作 为一 门新兴 的计算机 辅助 工程 技术 , 目前 已广泛 应用 于众 多机械 工程领域 , 包括 武
器 系统 的仿 真分 析 工 作 中。在对 火 炮 、 自动 武器 和
火箭 炮 等 武 器 的 发 射 动 力 学 分 析 中 , 泛 应 用 了 广
1 载荷 施 加 方 法
adams约束与载荷的施加与修改解析
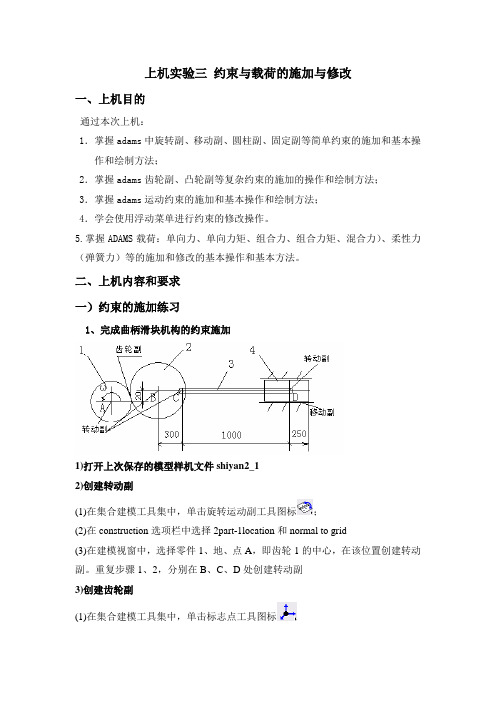
上机实验三约束与载荷的施加与修改一、上机目的通过本次上机:1.掌握adams中旋转副、移动副、圆柱副、固定副等简单约束的施加和基本操作和绘制方法;2.掌握adams齿轮副、凸轮副等复杂约束的施加的操作和绘制方法;3.掌握adams运动约束的施加和基本操作和绘制方法;4.学会使用浮动菜单进行约束的修改操作。
5.掌握ADAMS载荷:单向力、单向力矩、组合力、组合力矩、混合力)、柔性力(弹簧力)等的施加和修改的基本操作和基本方法。
二、上机内容和要求一)约束的施加练习1、完成曲柄滑块机构的约束施加1)打开上次保存的模型样机文件shiyan2_12)创建转动副(1)在集合建模工具集中,单击旋转运动副工具图标;(2)在construction选项栏中选择2part-1location和normal to grid(3)在建模视窗中,选择零件1、地、点A,即齿轮1的中心,在该位置创建转动副。
重复步骤1、2,分别在B、C、D处创建转动副3)创建齿轮副(1)在集合建模工具集中,单击标志点工具图标(2)在主工具箱的选项栏中选择add to ground和global XZ(3)在建模视窗中,选择点(齿轮1与齿轮2)的交接附近,然后在该点创建标志点(4)在集合建模工具集中,单击齿轮运动副工具图标(5)在对话框中,鼠标放在选项栏join name中,点击右键——browse浏览约束,输入A、B处的铰链名;在velocity marker中,点击右键——browse浏览标志点,输入刚创建的标志点名,点击OK,实现创建齿轮副4)创建滑动副(1)在集合建模工具集中,单击滑动运动副工具图标;(2)在construction选项栏中选择2part-1location和pick feature(3)在建模视窗中,选择依次滑块4、地(4)选择点D下部某点作为移动副位置(5)移动鼠标使箭头水平,点击鼠标,生成移动副5)设置齿轮1的运动速度(1)在集合建模工具集中,单击旋转运动工具图标;(2)在speed文本框中输入60 r,定义转动速度为60rad/s(3)在建模视窗中,选择齿轮1上的转动副,创建运动约束6)修改约束(1)打开B 处的约束修改对话框:鼠标放在B上的铰链副joint上,单击右键—浮动菜单modify,打开运动修改对话框,使其约束由转动副变为圆柱副(2)打开齿轮1上的运动约束修改对话框,修改齿轮1的运动为往复运动:鼠标放在齿轮1上的运动副motion上,单击右键—浮动菜单modify,打开运动修改对话框,点击funcction(time)右侧的图标,打开编辑器对话框,在define a runtime function中输入:step(time,0,0,10,60)+step(time,10,60,20,-60)。
adams约束介绍学习资料
允许2个零件相对转动,去除3个移动自由 度 允许2件在一平面内运动,去除2个旋转和3 个移动自由度
-Chapter 3
6
名称
恒速副 Constant Velocity
万向节
运 Hooke/Univ ersal
动 螺旋副 副 Screw 约 束 齿轮副Gear
-Chapter 3
11
名称
平行约束 Parallel Axes
垂直约束 Perpendicu lar
方向约束 Orientatio n
点面约束 Inplane
点线约束 Inline
图标
说明 约束构件1的连接点,只能沿着构件2连接点标 记的Z轴运动。去除2个旋转自由度
约束构件1的Z轴始终垂直于构件2的Z轴,即: 约束构件1只能绕构件2的二个轴旋转。去除1 个旋转自由度 限定两个零件的零件坐标系坐标轴同向,不能 相对旋转,去除3个旋转自由度
关联副 Coupler
固定副 Fixed
图标
说明
限定两个旋转运动等速,去除1个旋转和3 个移动自由度
旋转运动在两个零件间传递,去除1个旋 转和3个移动自由度
允许一个零件相对于另一个零件的轴线旋 转,并且有轴向移动。需定义螺距值。正 螺距值创建右手螺纹。去除2个旋转和3个 移动自由度
复杂运动副,把3个零件和2个简单运动副 连接起来形成齿轮运动和其它类型的运动
把2个或3个简单运动副连接起来实现运动 或能量的传递
把2个零件固连在一起
-Chapter 3
7
连接方法:
一 三种连接构件方法的选择 (1) 1个位置(1location) (2) 2个构件1个位置(2bodies-1location) (3) 2个构件2个位置(2bodies-2location) 二 两种连接方向的选择 (1) 栅格方向(Normal to Grid) (2) 选取方向(Pick Feature) 三 一般连接约束副的创建方式(JOINT_1) (1)点选所需的连接约束图标; (2)确定连接构件的方法和选择连接方向; (3)依次选择相互连接的构件1、构件2、连接位置、连接方向。 四 举例施加齿轮副
ADAMS约束问题讨论
·50· 计算机应用技术 机械 2007年第12期 总第34卷————————————————收稿日期:2007-08-27作者简介:喻涛(1980-),硕士研究生,主要研究方向为机械CAD/CAM 。
ADAMS 约束问题讨论喻涛,李文蔚(昆明理工大学,云南 昆明 650093)摘要:机构存在冗余约束时,ADAMS 会在计算时自动解除一些约束,从而使被解除约束的自由度上不会计算构件间的作用力。
冗余约束应在进行动力学分析前被手动解除,以获得更精确的结果数据。
关键词:ADAMS ;约束方程;冗余约束中图分类号:TH122 文献标识码:A 文章编号:1006-0316(2007)12-0050-02Discussion of constraint questions based on ADAMSYU Tao ,LI Wen-wei(Kunming University of Science and Technology ,Kunming 650093,China)Abstract :ADAMS will make some constraints invalid in the process of calculation automatically when redundant constraints exists in mechanism, then the joint reaction forces in any directions associated with redundant constraint equations will not be calculated .To gain most accurate date ,the redundant constraints should be eliminated by hand before dynamic analysis. Key words :ADAMS ;constraint equation ;redundant constraint虚拟样机分析软件ADAMS (Automatic Dynamic Analysis of Mechanical Systems ),目前己经被全世界各行各业的数百家主要制造商采用,ADAMS 软件能对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。
ADAMS教程很详细手把手教你学会
ADAMS教程很详细手把手教你学会
ADAMS是一款领先的多体动力学仿真软件,广泛应用于机械、航空航天、汽车等领域。
它可以帮助工程师进行产品设计、性能分析、优化等工作。
本文将介绍ADAMS的使用方法,通过详细的手把手教程,让你轻松掌握ADAMS的技术。
接下来,我们需要在模型中添加不同的零部件,比如连接件、传动件等。
通过简单的拖拽操作,将零部件拖放到模型中,并连接它们。
通过设定零部件的属性和参数,可以定制不同的模型。
在模型构建完成后,我们可以进行仿真分析。
点击仿真按钮,ADAMS 将自动计算模型的运动学和动力学特性,得到系统的运动轨迹、力学特性等。
通过对仿真结果的分析,我们可以了解系统的行为和性能。
除了基本的模型构建和仿真分析,ADAMS还提供了优化功能。
通过设定不同的优化目标和约束条件,ADAMS可以自动优化系统设计,使其达到最佳性能。
另外,ADAMS还支持多种输出格式,比如图表、动画等。
我们可以将仿真结果输出为图表,方便进行数据分析;也可以生成动画演示,直观显示系统的运动过程。
总的来说,ADAMS是一款功能强大的多体动力学仿真软件,能帮助工程师进行产品设计和性能分析。
通过本文的手把手教程,相信你已经掌握了ADAMS的基本使用方法,希望你能够在工程设计中充分发挥ADAMS的优势。
ADAMS使用手册

第一章ADAMS简介 (1)一、ADAMS分析流程 (1)二、ADAMS的分析和计算方法 (1)三、ADAMS特点 (2)四、Adams模块 (2)第二章ADAMS建模及仿真运行 (5)第一节ADAMS几何建模 (5)一、基本几何形状 (5)二、简单几何体 (6)三、复杂几何体 (9)四、修改构件属性 (11)第二节添加运动副 (12)一、运动副类型 (12)二、定义运动副的一些技巧 (14)第三节Adams载荷 (15)一、添加单向作用力和力矩 (16)二、添加力或力矩 (16)三、添加柔性连接 (17)四、特殊载荷 (18)第四节仿真参数控制及仿真 (19)一、仿真分析输出设置 (19)二、模型检查 (22)三、模型仿真 (23)第五节仿真后处理 (27)一、后处理基本操作 (27)二、仿真过程回放 (29)三、仿真曲线 (29)第三章ADAMS应用 (33)第一节车盖及其杠杆联动机构 (33)一、参数化建模 (33)二、设计研究 (33)三、试验设计 (33)四、优化分析 (34)五、车盖及其杠杆联动机构分析 (35)第二节航空飞行器夹紧机构 (43)一、工作原理 (43)二、建立几何模型 (44)三、挂锁仿真分析 (45)四、测试验证 (48)五、参数化模型及优化设计 (50)第三节内燃机配气机构设计与优化 (54)第一章ADAMS简介ADAMS (Automatic Dynamic Analysis Mechanical Systems)软件是美国MDI公司(Mechanical Dynamics Inc)开发的虚拟样机分析软件,是世界上应用最广泛的机械系统仿真分析软件。
利用ADAMS ,设计人员能够建立机械系统虚拟样机,在物理样机制造之前,分析其工作性能,帮助用户更好地理解系统的运动,进行多种设计方案比较和优化等。
ADAMS软件使用交互式图形环境和零件库、约束库、力库,创建机械系统运动学/动力学模型,进行系统的静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。
adams约束与载荷的施加与修改

上机实验三约束与载荷的施加与修改一、上机目的通过本次上机:1.掌握adams中旋转副、移动副、圆柱副、固定副等简单约束的施加和基本操作和绘制方法;2.掌握adams齿轮副、凸轮副等复杂约束的施加的操作和绘制方法;3.掌握adams运动约束的施加和基本操作和绘制方法;4.学会使用浮动菜单进行约束的修改操作。
5.掌握ADAMS载荷:单向力、单向力矩、组合力、组合力矩、混合力)、柔性力(弹簧力)等的施加和修改的基本操作和基本方法。
二、上机内容和要求一)约束的施加练习1、完成曲柄滑块机构的约束施加1)打开上次保存的模型样机文件shiyan2_12)创建转动副(1)在集合建模工具集中,单击旋转运动副工具图标;(2)在construction选项栏中选择2part-1location和normal to grid(3)在建模视窗中,选择零件1、地、点A,即齿轮1的中心,在该位置创建转动副。
重复步骤1、2,分别在B、C、D处创建转动副3)创建齿轮副(1)在集合建模工具集中,单击标志点工具图标(2)在主工具箱的选项栏中选择add to ground和global XZ(3)在建模视窗中,选择点(齿轮1与齿轮2)的交接附近,然后在该点创建标志点(4)在集合建模工具集中,单击齿轮运动副工具图标(5)在对话框中,鼠标放在选项栏join name中,点击右键——browse浏览约束,输入A、B处的铰链名;在velocity marker中,点击右键——browse浏览标志点,输入刚创建的标志点名,点击OK,实现创建齿轮副4)创建滑动副(1)在集合建模工具集中,单击滑动运动副工具图标;(2)在construction选项栏中选择2part-1location和pick feature(3)在建模视窗中,选择依次滑块4、地(4)选择点D下部某点作为移动副位置(5)移动鼠标使箭头水平,点击鼠标,生成移动副5)设置齿轮1的运动速度(1)在集合建模工具集中,单击旋转运动工具图标;(2)在speed文本框中输入60 r,定义转动速度为60rad/s(3)在建模视窗中,选择齿轮1上的转动副,创建运动约束6)修改约束(1)打开B 处的约束修改对话框:鼠标放在B上的铰链副joint上,单击右键—浮动菜单modify,打开运动修改对话框,使其约束由转动副变为圆柱副(2)打开齿轮1上的运动约束修改对话框,修改齿轮1的运动为往复运动:鼠标放在齿轮1上的运动副motion上,单击右键—浮动菜单modify,打开运动修改对话框,点击funcction(time)右侧的图标,打开编辑器对话框,在define a runtime function中输入:step(time,0,0,10,60)+step(time,10,60,20,-60)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
凸轮副施加对话框
凸轮副施加参数设置 凸轮副类型
凸轮啮合 线类型
设置凸轮机构时应注意以下方面:
1) 使用足够多的点来定义曲线。 2) 尽可能使用封闭曲线。 3) 所定义的曲线应该包括凸轮运动的全部范围。 4) 避免将初始触点定义在曲线的接点附近。 5) 应避免曲底凸轮机构产生一个以上的触点。 6) 可以使用一条曲线定义多个接触约束。
一般点参数设置对话框
运动
名称
移动
点
参考 点
参数 设置
• 运动可以是与时间有关的位移、速度和加速 度。在默认状态下,运动的速度定义为常数。 用户可以自定义运动值
运动修改对话框
运动名称
连接名称 连接类型 运动方
式
运动参 数设置
公式编辑器
公式编辑器对话框
公式输入窗 口
编辑公式
实例:
运动速度大小为阶梯变化时
1.2、约束工具
• 有两种启动约束工具的方法: • 一种是在主工具箱中,选择连接工具集
图标或运动工具集图标,然后选择约束 工具。 • 另一种方法是在Build菜单中选择Joints 项,可显示连接对话框。 •
约束与运动工具集
常用约束工具
接触约束工具 运动约束工具
凸轮约束工具
状态参数 设置
1.3、常用运动副
第三讲 ADAMS约束和载荷 施加与修改
一、约束的施加与修改 二、载荷的施加与修改
1.1、约束的概述和分类
• ADAMS/View可以处理以下4种类型的约束: • 1) 常用运动副约束 • 2) 指定约束方向,即:限制某个运动方向 • 3) 接触约束,定义两构件在运动中发生接触时,
是怎样相互约束的。 • 4) 约束运动。
齿
两
轮
个
副 名
连 接
称
一个标志点
齿轮副施加对话框
• 施加齿轮副注意如下:
• • 1)按以上介绍的运动副设置方法,分别设置齿
轮副的两个连接。在设置时,应注意首先选择 的构件为齿轮,其次为连接支架。
• 2)在几何建模工具集,选择标记工具图标, 设置速度标记,即定义齿轮啮合点。
• 注意,速度标记z轴的方向,应该指向齿轮副 啮合点的运动方向。
1.4、修改运动副
利用弹出式菜单,选择有关运动副,再选择 Modify命令
• 1)运动副名称、连接的构件1和构件2、连 接类型、仿真分析时是否显示连接力
• 2)设置初始条件。对铰接副、棱柱副和圆 柱副,可以设置初始条件,包括:构件1的 连接点相对于构件2的初始位移和初始速度 等。
• 3)指定连接的运动。用户可以强行指定运动副 中可以活动的轴的运动规律。例如:指定棱柱 副沿z轴的按一定的时间函数
动
转
运
运
动
动
工
工
具
具
指定移动速度操作过程 操作工具
移动 速度
参数设置
指定转动速度操作过程 操作工具
转动 速度
参数设置
• (2)点运动
• 点运动定义两点之间的运动规律。定义点规 律时,还需指明运动的方向。点运动可以应 用了任何典型的运动副。
点运动工具
单 项 运 动
复 合 运 动
•
•
2、凸轮机构
• (1)凸轮机构ADAMS/View可以处理两种形式 的凸轮机构:尖底凸轮机构和曲底凸轮机构。
• 在尖底凸轮机构中,定义构件1为从动轮,可 以旋转运动,同时构件1上的触点始终沿着构件 2(凸轮)的轮廓曲线运动。尖底凸轮约束了2 个移动自由度。
• 在曲底凸轮机构中,约束条件1(从动轮)上 的一条曲线始终沿着构件2(凸轮)的轮廓曲线 运动。曲底凸轮约束了3个自由度。应用时应该 注意曲底凸轮机构中只允许有一个接触点
指定约束对话框
1.6、 定义机构的运动
• 运动的类型和定义值
• 通过定义机构遵循一定的规律进行运动,可以 约束机构的某些自由度,另一方面也决定了是 否需要施加力来维持所定义的运动。
• ADAMS/View提供了以下两种类型的运动: • (1)连接运动 • 连接运动定义铰接副、棱柱副和圆柱副中的移
动和转动,每一个连接运动约束了一个自由度。
点运动操作过程 操作工具
一个位置
两物体、 一个位置
指定物体 和位置
指定方 向
两物体、 两位置
垂直栅格
指定方向
参数设置
指定类 型
指定移动或 转动
移动 速度
一般点运动操作过程
操作工具
指定物体 和位置
一个位置
两物体、 一个位置
两物体、 两位置
指定方 向
垂直栅格 指定方向
参数设置
其大小设置在 随后出现的对 话框中,方向 在操作中指定。
Step(time,t0,v0, t1,v1)
一个位置
两物体、 一个位置
指定物 体和位 置
指定方 向
两物体、 两位置
垂直栅格
指定方向
第 一 物 第体二 物体
• 注意: 在施加运动副的过程中,程序要求依次 选择被连接的构件1和构件2,ADAMS/View设 定在两个被连接的构件中,是构件1被连接到 构件2上面。例如:如果要使用旋转运动副将 一扇门连接到门框上,在选择被连接的构件时, 首先应该选择门,然后选择门框。
• 产生运动副时,ADAMS/View自动为运动副 设置一个名称,运动副取名为
• “JOINT_”+“序号”,例如:JOINT_1
复杂运动副:齿轮副、关联副、凸轮副。
1、施加齿轮副
• 齿轮副由两个齿轮,一个连接支架和两个连接组 成。在两个齿轮(连接件)的触点设置一个坐标系 标记,称为速度标记,两个连接件都以速度标记 坐标系为自己的定位坐标系。速度标记到两个连 接点的距离决定了齿轮的传动比,速度标记的轴 定义了齿轮啮合点的速度和啮合力的方向。齿轮 副中的连接可以是铰接副、棱柱副或圆柱副,用 户可以选择不同类型的连接,模拟不同的齿轮连 接形式。
ADAMS/view提供了l 2种常用的运动副工具。 通过这些运动副,可以将两个构件连接起来。 被连接的构件可以是刚体构件、柔性构件或 者是点质量。又分为简单运动副和复杂运动 副。
简单运动副:铰链连接、移动副、转动副等。
简单副连 接
简单约束工具集
高副 连接
下方状态参数设置
转动副施加过程 操作工具
• 4)对铰接副、棱柱副、圆柱副、万向副和球形 副,可以施加动态和静态摩擦力,以及预紧力。
运动副修改对话框
运动副 名称
第一连接件
是否 显示 连接
力
第二连接件
连接形式
初始参数 设置
1.5、指定约束
• ADAMS/View提供了5种常用的指定 约束工具。用户可以灵活运用这些约束 工具,组成不同的约束。