数控加工程序输入及预处理——刀具补偿原理3
刀具补偿原理
X F X B X FP 15 35 50 Z F Z B Z FP 70 20 50
讨论: 1)利用(2-3)式,我们可以得到测量刀具长度参数的计算公式:
l X X F X P lZ Z F Z P
其中: ①(ZF,XF):刀架相关点F的坐标; ②(ZP,XP):新刀具刀尖点坐标。
下一个程序段包含G40功能字
刀具半径补偿撤消状态
非半径补偿状态 假设数控系统的当前工作状态为非半径补偿状态。 ① 如果当前程序段不包含G41或G42功能字,则数控系统保持非半径补 偿状态。 ② 如果当前程序段包含G41或G42功能字,则数控系统转入刀具半径补 偿建立状态。 在非半径补偿状态下,当前编程轮廓的终点就是当前编程轮廓的转接点。 数控系统控制刀具中心直接运动到该点位置。
LX X FP X PF LZ Z FP Z PF
此时刀具长度补偿计算公式可写成:
X F X P LX Z F Z P LZ
(2-3)
② 而在有些数控系统中,刀具参数表中的刀具长度参数采用刀尖点P相对于 刀架参考点F的坐标值(ZPF,XPF) ,即
F F X XPF
M
Z
X
Z
ZPF
W
ZWM Z FM Z PF Z PW Z FM LZ Z PW X WM X FM X PF X PW X FM LX X PW
(2)假设刀尖圆弧半径RS ≠ 0
此时,刀具的补偿算法比较复杂,一方面要考虑刀尖圆弧半径的补偿 (刀具半径补偿类型),另一方面还要考虑刀具长度补偿。 但是,一般情况下RS很小,在有些生产场合可以不考虑它对零件轮廓的影 响,另一方面,在对刀过程中已经把RS在平行于坐标轴方向所引起的误差进行 了补偿,因此零件表面上平行于坐标轴的轮廓不会再产生附加误差(但斜线 或圆弧还是会有误差),在此暂时不考虑刀尖圆弧的补偿计算。
数控机床刀具补偿原理
1. 刀具长度补偿 以数控车床为例进行说明,数控装置控制的是刀架参考 点的位置,实际切削时是利用刀尖来完成,刀具长度 补偿是用来实现刀尖轨迹与刀架参考点之间的转换。 如图3-35所示,P为刀尖,Q为刀架参考点,假设刀尖 圆弧半径为零。利用刀具长度测量装置测出刀尖点相 对于刀架参考点的坐标xpq,zpq,存入刀补内存表中。 零件轮廓轨迹是由刀尖切出的,编程时以刀尖点P来编程, 设刀尖P点坐标为xp ,zp ,刀架参考点坐标Q(xq ,zq ) 可由下式求出:
图3-40a给出了普通数控系统的工作方法,在系统内, 数据缓冲寄存区BS用以存放下一个加工程序段的信息, 设置工作寄存区AS,存放正在加工的程序段的信息, 其运算结果送到输出寄存区OS,直接作为伺服系统的 控制信号。 图3-40b为CNC系统中采用C刀补方法的原理框图, 与3-40a不同的是,CNC装置内部又增设了一个刀补缓 冲区CS。当系统启动后,第一个程序段先被读入BS, 在BS中算得第一段刀具中心轨迹,被送到CS中暂存后, 又将第二个程序段读入BS,算出第二个程序段的刀具 中心轨迹。接着对第一、第二两段刀具中心轨迹的连 接方式进行判别,根据判别结果,再对第一段刀具中 心轨迹进行修正。
加工如图3-39外部轮廓零件ABCD时,由AB直线段开始,接 着加工直线段BC,根据给出的两个程序段,按B刀补处 理后可求出相应的刀心轨迹A1B1和B2C1。
事实上,加工完第一个程序段,刀具中心落在B1 点上, 而第二个程序段的起点为B2 ,两个程序段之间出现了 断点,只有刀具中心走一个从B1 至B2 的附加程序,即 在两个间断点之间增加一个半径为刀具半径的过渡圆 弧B1B2,才能正确加工出整个零件轮廓。 可见,B刀补采用了读一段,算一段,再走一段的控 制方法,这样,无法预计到由于刀具半径所造成的下 一段加工轨迹对本程序段加工轨迹的影响。为解决下 一段加工轨迹对本段加工轨迹的影响,在计算本程序 段轨迹后,提前将下一段程序读入,然后根据它们之 间转接的具体情况,再对本段的轨迹作适当修正,得 到本段正确加工轨迹,这就是C功能刀具补偿。C功能 刀补更为完善,这种方法能根据相邻轮廓段的信息自 动处理两个程序段刀具中心轨迹的转换,并自动在转 接点处插入过渡圆弧或直线从而避免刀具干涉和断点 情况。
数控车床刀尖半径补偿的原理和应用介绍
数控车床刀尖半径补偿的原理和应用分析(2011—11-07 19:39:41)分类:工程技术标签:杂谈摘要:分析了数控车削中因刀尖圆弧产生误差的原因,介绍了纠正误差的思路及半径补偿的工作原理,明确了半径补偿的概念。
结合实际,系统介绍了刀具半径补偿的应用方法,及使用中的注意事项。
Abstract: Analyzed the error's reason in numerical control turning because of arc of cutting tool ,introduced the correction error’s mentality and the radius compensation principle of work,cleared about the radius compensation concept. Union reality,introduced the cutting tool radius compensation application method, and in use matters needing attention..关键词:数控车床;假想刀尖;半径补偿;程序轮廓;原理;应用;Key word:CNC lathe;immaginary cutting tool point; radius compensation; procedure outline;principle; using1、前言在数控车床的学习中,刀尖半径补偿功能,一直是一个难点。
一方面,由于它的理论复杂,应用条件严格,让一些人感觉无从下手;另一方面,由于常用的台阶轴类的加工,通过几何补偿也能达到精度要求,它的特点不能有效体现,使一些人对它不够重视.事实上,在现代数控系统中,刀尖半径补偿,对于提高工件综合加工精度具有非常重要的作用,是一个必须熟练掌握的功能。
2、刀尖圆弧半径补偿的原理(1)半径补偿的原因在学习刀尖圆弧的概念前,我们认为刀片是尖锐的,并把刀尖看作一个点,刀具之所以能够实现复杂轮廓的加工,就是因为刀尖能够严格沿着编程的轨迹进行切削。
2--刀具补偿及刀具长度补偿计算方法
(1)假设刀尖圆弧半径RS = 0 此时,P点与S点重合,根据图示的几何关系可知:
rF rP rPF
已知:
rF (Z F , X F )
rP (Z P ,
XP)
rPF (Z PF ,
X PF )
代入上式后得刀具长度补偿计算公式为:
X F X P X PF Z F Z P Z PF
三、刀具半径补偿计算 (一)刀具半径补偿原理 (1)什么是刀具半径补偿 在零件轮廓的加工过程中,数控系统的控制对象是加工刀具的中心点。 在加工零件轮廓时,数控系统必须使刀具中心在零件轮廓的法矢量方向上偏 移一个刀具半径值,这种偏移操作就称为刀具半径补偿。 刀具半径补偿就是根据零件轮廓计算出刀具中心轨迹的操作。一般来说, 有两种计算手段。
二、刀具长度补偿计算 当刀具的长度尺寸发生变化而影响工件轮廓的加工时,数控系统应对这种 变化实施补偿,即刀具长度补偿。 X
(1)车床情况 数控车床的刀具结构如右图所示。 S :刀尖圆弧圆心; RS:刀尖圆弧半径; P(ZP,XP):理论刀尖点; F(ZF,XF):刀架相关点; (ZPF,XPF):P点相对于F点的坐标。
LX X FP X PF LZ Z FP Z PF
此时刀具长度补偿计算公式可写成:
X F X P LX Z F Z P LZ
(2-3)
② 而在有些数控系统中,刀具参数表中的刀具长度参数采用刀尖点P相对于 刀架参考点F的坐标值(ZPF,XPF) ,即
(120,50)
G0 X30 Y20 G1 G42 X50 Y50 X120 Y80 G3 X90 Y110 I-30 J0 G1 X50 Y50 G1 G40 X30 Y20 G0 X0 Y0
数控车床刀具补偿知识

(2)刀尖方位的设置
车刀形状很多,使用时安装位置也各异,由此 决定刀尖圆弧所在位置。 要把代表车刀形状和位置的参数输入到数据库中。 以刀尖方位号表示。
从图示可知,
若刀尖方位码设为0或9时,机床将以刀尖圆弧中 心为刀位点进行刀补计算处理; 当刀尖方位码设为1~8时,机床将以假想刀尖为 刀位点,根据相应的代码方位进行刀补计算处理。
为什么需要刀具刀具补偿?
刀具使用一段时间后会磨损 ,会使加工尺寸
产生误差.
解决: •将磨损量测量获得后进行补偿.
可以不修改加工程序.
为什么需要刀具刀具补偿
数控程序一般是针对刀位点 ,
按工件轮廓尺寸编制的 . 当刀 尖不是理想点而是一段圆弧时 , 会造成实际切削点与理想刀位 点的位置偏差.
解决: •对刀尖圆弧半径进行补偿.
N11 M30
五、换刀程序编写
G27、G28、G29. ----- 参考点控制
1、格式:
1、关于参考点操作的指令
G27 X... Z... T0000 ; 回指令参考点检验 G28 X... Z... T0000 ; 经指令中间点再自动回参考点 G29 X... Z... ; 从参考点经中间点返回指令点
过程:
将某把车刀的几何偏置和磨损补偿值存入相应的刀补地址 中。 当程序执行到含 Txxxx的程序行的内容时,即自动到刀补 地址中提取刀偏及刀补数据。
驱动刀架拖板进行相应的位置调整。
T XX 00取消几何补偿。
对于有自动换刀功能的车床来说,执行T指令时, 将先让刀架转位,按刀具号选择好刀具后,再调 整刀架拖板位置来实施刀补。
O1111
例2:考虑刀尖半径补偿
N1 G92 X40.0 Z10.0
刀具补偿原理

刀具半径补偿原理及补偿规则Post By:2006-12-14 20:14:00在加工过程中,刀具的磨损、实际刀具尺寸与编程时规定的刀具尺寸不一致以及更换刀具等原因,都会直接影响最终加工尺寸,造成误差。
为了最大限度的减少因刀具尺寸变化等原因造成的加工误差,数控系统通常都具备有刀具误差补偿功能。
通过刀具补偿功能指令,CNC系统可以根据输入补偿量或者实际的刀具尺寸,使机床自动加工出符合程序要求的零件。
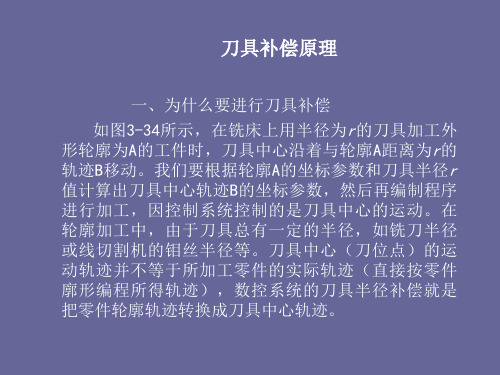
1.刀具半径补偿原理(1)刀具半径补偿的概念用铣刀铣削工件的轮廓时,刀具中心的运动轨迹并不是加工工件的实际轮廓。
如图所示,加工内轮廓时,刀具中心要向工件的内侧偏移一定距离;而加工外轮廓时,同样刀具中心也要向工件的外侧偏移一定距离。
由于数控系统控制的是刀心轨迹,因此编程时要根据零件轮廓尺寸计算出刀心轨迹。
零件轮廓可能需要粗铣、半精铣和精铣三个工步,由于每个工步加工余量不同,因此它们都有相应的刀心轨迹。
另外刀具磨损后,也需要重新计算刀心轨迹,这样势必增加编程的复杂性。
为了解决这个问题,数控系统中专门设计了若干存储单元,存放各个工步的加工余量及刀具磨损量。
数控编程时,只需依照刀具半径值编写公称刀心轨迹。
加工余量和刀具磨损引起的刀心轨迹变化,由系统自动计算,进而生成数控程序。
进一步地,如果将刀具半径值也寄存在存储单元中,就可使编程工作简化成只按零件尺寸编程。
这样既简化了编程计算,又增加了程序的可读性。
刀具半径补偿原理(2)刀具半径补偿的数学处理①基本轮廓处理要根据轮廓尺寸进行刀具半径补偿,必需计算刀具中心的运动轨迹,一般数控系统的轮廓控制通常仅限于直线和圆弧。
对于直线而言,刀补后的刀具中心轨迹为平行于轮廓直线的一条直线,因此,只要计算出刀具中心轨迹的起点和终点坐标,刀具中心轨迹即可确定;对于圆弧而言,刀补后的刀具中心轨迹为与指定轮廓圆弧同心的一段圆弧,因此,圆弧的刀具半径补偿,需要计算出刀具中心轨迹圆弧的起点、终点和圆心坐标。
数控刀具补偿原理

3.3 刀具补偿原理刀具补偿(又称偏置),在20世纪60~70年代的数控加工中没有补偿的概念,所以编程人员不得不围绕刀具的理论路线和实际路线的相对关系来进行编程,容易产生错误。
补偿的概念出现以后很大地提高了编程的效率。
具有刀具补偿功能,在编制加工程序时,可以按零件实际轮廓编程,加工前测量实际的刀具半径、长度等,作为刀具补偿参数输入数控系统,可以加工出合乎尺寸要求的零件轮廓。
刀具补偿功能还可以满足加工工艺等其他一些要求,可以通过逐次改变刀具半径补偿值大小的办法,调整每次进给量,以达到利用同一程序实现粗、精加工循环。
另外,因刀具磨损、重磨而使刀具尺寸变化时,若仍用原程序,势必造成加工误差,用刀具长度补偿可以解决这个问题。
刀具补偿分为2种:☆刀具长度补偿;☆刀具半径补偿。
文献《刀具补偿在数控加工中的应用》(工具技术,2OO4年第38卷No7,徐伟,广东技术师范学院)中提到在数控加工中有4种补偿:☆刀具长度补偿;☆刀具半径补偿;☆夹具补偿;☆夹角补偿(G39)。
这四种补偿基本上能解决在加工中因刀具形状而产生的轨迹问题。
3.3.1 刀具长度补偿1.刀具长度的概念刀具长度是一个很重要的概念。
我们在对一个零件编程的时候,首先要指定零件的编程中心,然后才能建立工件编程坐标系,而此坐标系只是一个工件坐标系,零点一般在工件上。
长度补偿只是和Z坐标有关,它不象X、Y平面内的编程零点,因为刀具是由主轴锥孔定位而不改变,对于Z坐标的零点就不一样了。
每一把刀的长度都是不同的,例如,我们要钻一个深为50mm的孔,然后攻丝深为45mm,分别用一把长为250mm的钻头和一把长为350mm的丝锥。
先用钻头钻孔深50mm,此时机床已经设定工件零点,当换上丝锥攻丝时,如果两把刀都从设定零点开始加工,丝锥因为比钻头长而攻丝过长,损坏刀具和工件。
此时如果设定刀具补偿,把丝锥和钻头的长度进行补偿,此时机床零点设定之后,即使丝锥和钻头长度不同,因补偿的存在,在调用丝锥工作时,零点Z坐标已经自动向Z+(或Z)补偿了丝锥的长度,保证了加工零点的正确。
数控系统的组成及工作原理
3.刀具半径补偿原理(2): .刀具半径补偿原理( ):
X ′ = X + ∆X Y ′ = Y + ∆Y Y ∆X = R ⋅ sin α = R X 2 +Y 2 X ∆Y = − R ⋅ cos α = − R X 2 +Y2 Y X′= X +R X 2 +Y 2 X Y ′ = Y − R X 2 +Y 2
上面讨论的是单段轮廓的刀补情况,通常工件轮 廓由多段曲线组成,如直线与直线、直线与圆弧、 圆弧与圆弧、圆弧与直线等,这就存在一个轮廓 交接处如何过渡的问题。C刀具补偿能自动地处 理两段程序之间的刀具中心轨迹的转接,编程人 员完全按工件轮廓编程。
刀具补偿原理( ) 4.C刀具补偿原理(2) 刀具补偿原理
图例给出了左刀补和右刀补时轮廓过渡处的处理 情形。从图可以看出:轮廓过渡时,为了避免过 切或间断,需要采用缩短、延长或插入的方式。
C刀具补偿原理图(1) 刀具补偿原理图( ) 刀具补偿原理图
C刀具补偿原理图(2) 刀具补偿原理图( ) 刀具补偿原理图
刀具补偿原理( ) 4.C刀具补偿原理(3) 刀具补偿原理
速度控制程序:根据给定的速度值控制插补运算的 频率,保证预定的进给速度。并能根据反馈值的正 与负自动地调节速度的大小。 管理程序:负责对数据输入、数据处理、插补运算 等各种程序进行调度管理;对诸如面板命令、时钟 信号、故障信号等引起的中断进行处理;子程序的 调用;共享资源的分时享用等。 诊断程序:通过识别程序中的一些标志符来判断故 障的类型和所在地。
数控机床与使用维修
第二讲 数控系统的组成及工作原理
山西工程职业技术学 院机械系 姚瑞敏
本讲主要内容
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(3)插入型 在插入型刀具半径补偿过程中,将涉及到多个转接点的计算。
不同阶段其转接点的计算公式也是不相同的。
1)刀具半径补偿建立 如图2-24a 所示,在插入型刀具半径补偿建立过程中,有三个转接点的坐标需要计算,它们依次是(X S 1,Y S 1)、(X S 2,Y S 2)、(X S 3,Y S 3)。
同理,由于转接点(X S 1,Y S 1)相对轮廓拐点(X 1,Y 1)偏移一个刀具半径矢量,故X S 1=X 1-rY l 1 (2-38a ) Y S 1=Y 1+rX l 1 (2-38b )对于(X S 2,Y S 2)则可视为直线'l 1在点(X S 1,Y S 1)处向前延伸了一个刀具半径所得到的,因此,该点的坐标为X S 2=X S 1+| r | X l 1=X 1-rY l 1+| r | X l 1 (2-39a ) Y S 2=Y S 1+| r | Y l 1=Y 1+rX l 1+| r | Y l 1 (2-39b )对于(X S 3,Y S 3),其求法与(X S 2,Y S 2)的相似,只是前者在直线'l 2的反方向延伸了一个刀具半径值。
因此,该点的坐标为X S 3=X 1-rY l 2-| r |X l 2 (2-40a ) Y S 3=Y 1+rX l 2-| r | Y l 2 (2-40b )2)刀具半径补偿撤消 如图2-24b 所示,在插入型刀具半径补偿撤消过程中,也有三个转接点的坐标需要计算,它们依次是(X S 1,Y S 1)、(X S 2,Y S 2)、(X S 3,Y S 3)。
其求法与刀具半径补偿建立相似,同理,可推出这三个坐标点的计算公式为X S 1=X 1-r Y l 1+| r | X l 1 (2-41a ) Y S 1=Y 1+r X l 1+| r | Y l 1 (2-41b ) X S 2=X 1-r Y l 2-| r | X l 2 (2-42a ) Y S 2=Y 1+r X l 2-| r | Y l 2 (2-42b ) X S 3=X 1-r Y l 2 (2-43a ) Y S 3=Y 1+r X l 2 (2-43b )3)刀具半径补偿进行 如图2-24c 所示,在插入型刀具半径补偿进行过程中,仅有两个转接点的坐标需要计算,即(X S 1,Y S 1)、(X S 2,Y S 2),它们的计算公式分别为X S 1=X 1-r Y l 1+| r | X l 1 (2-44a ) Y S 1=Y 1+r X l 1+| r | Y l 1 (2-44b ) X S 2=X 1-r Y l 2-| r | X l 2 (2-45a ) Y S 2=Y 1+r X l 2-| r | Y l 2 (2-45b )2.直线接圆弧 设零件的直线轮廓段l 起点为(X 0,Y 0),终点为(X 1,Y 1),而与之相接的圆弧轮廓段c 起点为(X 1,Y 1),终点为(X 2,Y 2),圆心相对圆弧起点的坐标为(I ,J )。
则直线的长度、方向矢量的投影分量均符合式(2-18)、(2-21)的定义,而圆弧在其起点(X 1,Y 1)处的半径、方向矢量的投影分量分别为⎪⎩⎪⎨⎧+-+=)(逆圆)(顺圆03/022222G J I G /J I R (2-46) X l 2=-J/R (2-47a ) Y l 2= I/R (2-47b )由于在圆弧轮廓上一般不进行刀具半径补偿的撤消,因此,只需考虑刀具半径补偿建立与进行阶段的转接点坐标计算问题。
另外,对于圆弧轮廓来讲,只要使用转接点处该圆弧的切线参与刀具半径补偿的作图和计算即可,并保证相邻轮廓之间的过渡段均为直线,其它与直线情况相类似。
(1)缩短型 1)刀具半径补偿建立 如图2-25a 所示,在直线接圆弧过程中,转接点(X S 1,Y S 1)相对轮廓拐点(X 1,Y 1)沿圆弧法线方向偏移一个刀具半径,因此,转接点(X S 1,Y S 1)的坐标计算公式为X S 1=X 1-r Y l 2 (2-48a ) Y S 1=Y 1+r X l 2 (2-48b )2'l 、'c 则分别对应表示刀具中心轨迹。
若将XOY 坐标系的原点平移至轮廓拐点(X 1,Y 1)处,则在新建坐标系下'l 的直线方程以及'c 的圆弧方程分别为-Y l 1X +X l 1Y =r (2-49)22020)r R ()Y Y ()X X (+='-+'- (2-50)式(2-50)中的)Y ,X (00''为新坐标系下圆弧的圆心坐标,R 为圆弧轮廓的半径,其定义参见式(2-46),r 为刀具半径,定义参见式(2-12)。
联立式(2-49)和式(2-50),可求得转接点(X S 1,Y S 1)在新坐标系下的坐标值为X =X l 1(X l 1I +Y l 1J )-r Y l 1-sgn (X l 1I +Y l 1J )X l 1f (2-51a ) Y =Y l 1(X l 1I +Y l 1J )+r X l 1-sgn (X l 1I +Y l 1J )Y l 1f (2-51b ) 式中 22)r I Y J X ()r R (f l1l1---+= (2-52)通过坐标平移,重新回到原来的XOY 坐标系,这时可求得转接点(X S 1,Y S 1)的坐标值。
现分两种情况讨论如下:① 当X l 1Y l 2-X l 2Y l 1=0时,直线与圆弧光滑连接,即相切。
因此,转换角 α=180º,刀具中心轨迹的转接点(X S 1,Y S 1)坐标为X S 1=X 1-r Y l 2 (2-53a ) Y S 1=Y 1+r X l 2 (2-53b )② 当X l 1Y l 2-X l 2Y l 1≠0时,直线与圆弧相交,故转换角为180º<α<360º,刀具中心轨迹的转接点(X S 1,Y S 1)坐标为X S 1=X 1+X l 1(X l 1I +Y l 1J )-r Y l 1-sgn (X l 1I +Y l 1J )X l 1f (2-54a ) Y S 1=Y 1+Y l 1(X l 1I +Y l 1J )+r X l 1-sgn (X l 1I +Y l 1J )Y l 1f (2-54b ) (2)伸长型 1)刀具半径补偿建立 如图2-26a 所示,在伸长型直线接圆弧的刀具补偿建立过程中,刀具中心轨迹在轮廓转接处有三个转接点(X S 1,Y S 1)、(X S 2,Y S 2)、(X S 3,Y S 3),它们的坐标计算公式分别为X S 1=X 1-r Y l 1 (2-55a ) Y S 1=Y 1+r X l 1 (2-55b )l1l2l2l1l1l2S Y X Y X r)X X (X X --+= 12 (2-56a )l1l2l2l1l1l2S Y X Y X r)Y Y (Y Y --+= 12 (2-56b ) X S 3=X 1-r Y l 2 (2-57a )Y S 3=Y 1+r X l 2 (2-57b ) 2)刀具半径补偿进行 如图2-26b 所示,在直线接圆弧的伸长型刀具补偿进行过程中,刀具中心轨迹在轮廓转接处有两个转接点,即(X S 1,Y S 1)和(X S 2,Y S 2),其坐标计算公式分别为l1l2l2l1l1l2S Y X Y X r)X X (X X --+= 11 (2-58a )l1l2l2l1l1l2S Y X Y X r)Y Y (Y Y --+= 11 (2-58b )′ ′X S 2=X 1-r Y l 2 (2-59a ) Y S 2=Y 1+r X l 2 (2-59b )(3)插入型 1)刀具半径补偿建立 如图2-27a 所示,在直线接圆弧的插入型刀具补偿建立过程中,转接点有四个(X S 1,Y S 1)、(X S 2,Y S 2)、(X S 3,Y S 3)、(X S 4,Y S 4),其坐标计算公式分别为X S 1=X 1-r Y l 1 (2-60a ) Y S 1=Y 1+r X l 1 (2-60b ) X S 2=X S 1+| r |X l 1=X 1-rY l 1+| r |X l 1 (2-61a ) Y S 2=Y S 1+| r |Y l 1=Y 1+rX l 1+| r |Y l 1 (2-61b ) X S 3=X 1-rY l 2-| r |X l 2 (2-62a ) Y S3=Y 1+rX l 2-| r |Y l 2 (2-62b ) X S 4=X 1-r Y l 2 (2-63a ) Y S 4=Y 1+r X l 2 (2-63b )2)刀具半径补偿进行 如图2-27b 所示,在直线接圆弧的插入型刀具补偿进行过程中,转接点有三个(X S 1,Y S 1)、(X S 2,Y S 2)、(X S 3,Y S 3),它们的坐标计算公式分别为X S 1=X 1-rY l 1+| r |X l 1 (2-64a )Y S 1=Y 1+rX l 1+| r |Y l 1 (2-64b ) X S 2=X 1-rY l 2-| r |X l 2 (2-65a )Y S 2=Y 1+rX l 2-| r |Y l 2 (2-65b ) X S 3=X 1-r Y l 2 (2-66a ) Y S 3=Y 1+r X l 2 (2-66b )3.圆弧接直线 设零件的圆弧轮廓段c 起点为(X 0,Y 0),终点为(X 1,Y 1),圆心相对圆弧起点的坐标为(I ,J ),圆弧半径为R ,其定义符合式(2-46)。
与圆弧相接的直线段l 起点为(X 1,Y 1),终点为(X 2,Y 2),直线长度为d 2,其定义符合式(2-16)。
那么,圆弧在其转接点(X 1,Y 1)处方向矢量的投影分量为X l 1=-Y 01/R (2-67a ) Y l 1=X 01/R (2-67b ) 其中X 01、Y 01的定义为X 01=X 0+I -X 1 (2-68a ) Y 01=Y 0+J -Y 1(2-68b ) 直线段方向矢量的投影分量为 212d X X X l2-= (2-69a )′ ′ ′图 2-27 直线接圆弧插入型刀具半径补偿示意图) ) )212d Y Y Y l2-=(2-69b ) 由于在圆弧轮廓上一般不进行刀具半径补偿的建立,因此,对于圆弧接直线的转接只有刀具半径补偿进行和撤消两种情况。
(1)缩短型 1)刀具半径补偿进行 刀具中心轨迹按圆弧接直线方式转接,就其实质而言是直线接圆弧的逆过程,如图2-28a 所示。