四旋翼无人机设计
四旋翼无人机系统设计
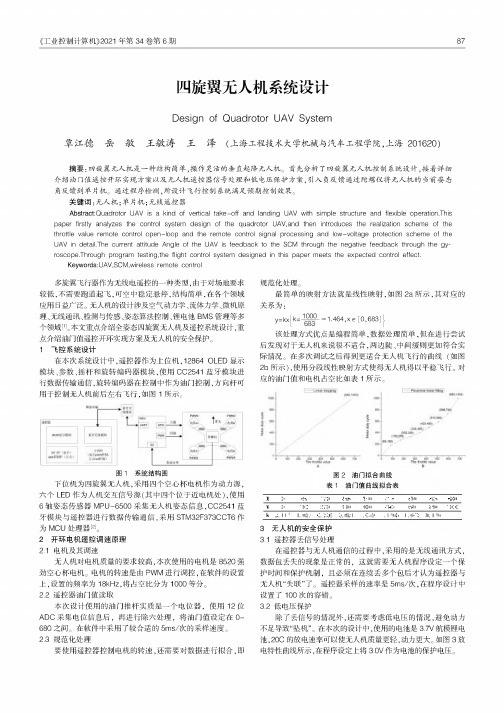
《工业控制计算机》2021年第34卷第6期87四旋翼无人机系统设计Des ign of Quadrotor UAV System覃江德岳敏王敏涛王泽(上海工程技术大学机械与汽车工程学院,上海201620)摘要:四旋翼无人机是一种结构简单,操作灵活的垂直起降无人机。
首先分析了四旋翼无人机控制系统设计,接着详细介绍油门值遥控开环实现方案以及无人机遥控器信号处理和低电压保护方案,引入负反馈通过陀螺仪将无人机的当前姿态角反馈到单片机。
通过程序检测,所设计飞行控制系统满足预期控制效果。
关键词:无人机;单片机;无线遥控器Abstract:Quadrotor UAV is a k i nd of vert ical take-off and land i n g UAV w i t h s i m ple structure and flex i ble operat i o n.Th i s paper firstly analyzes the control system des i g n of the quadrotor UAV,and then introduces the real i z at i o n scheme of the throttle value remote control open-loop and the remote control s i g nal process i n g and low-voltage protect i o n scheme of the UAV in deta i l.The current att i t ude Angle of the UAV is feedback to the SCM through the negat i v e feedback through the gy-roscope.Through program test i n g,the fl i g ht control system des i g ned in th i s paper meets the expected control effect.Keywords:UAV,SCM,w i r eless remote control多旋翼飞行器作为无线电遥控的一种类型,由于对场地要求较低,不需要跑道起飞,可空中稳定悬停,结构简单,在各个领域应用日益广泛。
基于STM32的四旋翼无人机设计

基于STM32的四旋翼无人机设计无人机技术的发展已经逐渐成为科技领域的热门话题,而四旋翼无人机则是其中一种应用广泛的无人机类型。
它可以应用于农业、航拍、物流等各种领域,具有很大的市场潜力。
本文将介绍基于STM32的四旋翼无人机设计,讨论其硬件构架和软件系统,希望可以为无人机爱好者提供一些技术方面的参考和帮助。
一、硬件构架1. 电机和螺旋桨四旋翼无人机采用四个电机驱动四个螺旋桨来产生上升力和姿态控制。
选择合适的电机和螺旋桨对于无人机的飞行性能至关重要。
电机需要具备足够的功率和转速来推动螺旋桨产生足够的升力,并且要求响应速度快,可以方便地实现姿态控制。
螺旋桨的尺寸、材质和设计也需要仔细选择和匹配,以确保其具有良好的气动性能和结构强度。
在选用电机和螺旋桨时,还需要考虑整机的配比和平衡,以保证无人机的飞行平稳性和操控性。
2. 传感器系统无人机的传感器系统是其智能化和自主飞行的关键。
常见的传感器包括陀螺仪、加速度计、罗盘、气压计等。
这些传感器可以实现无人机的姿态感知、空间定位和高度控制等功能,从而保证无人机的飞行稳定性和精准性。
在选择传感器时,需要考虑其精度、响应速度、通信接口和适应环境等因素,以保证传感器系统可以满足无人机的实际飞行需求。
3. 控制系统基于STM32的四旋翼无人机设计通常采用飞控主板来实现飞行控制和数据处理。
飞控主板集成了微处理器、传感器接口、无线通信模块等功能,可以实现无人机的自主控制和遥控操作。
在设计控制系统时,需要考虑飞行控制算法、通信协议、数据处理速度等因素。
飞控主板还可以通过扩展接口连接其他外围设备,如GPS模块、避障传感器、摄像头等,实现更丰富的功能和应用。
二、软件系统1. 飞行控制算法飞行控制算法是基于传感器数据和飞行器状态信息,实现对电机转速和螺旋桨姿态的智能控制。
常见的飞行控制算法包括PID控制、自适应控制、模糊控制等。
这些算法可以根据无人机的动力学特性和环境变化,实现稳定的姿态控制、高效的空间定位和精准的高度控制。
四旋翼快递用无人机总体结构方案设计
湖北武汉
摘
Байду номын сангаас
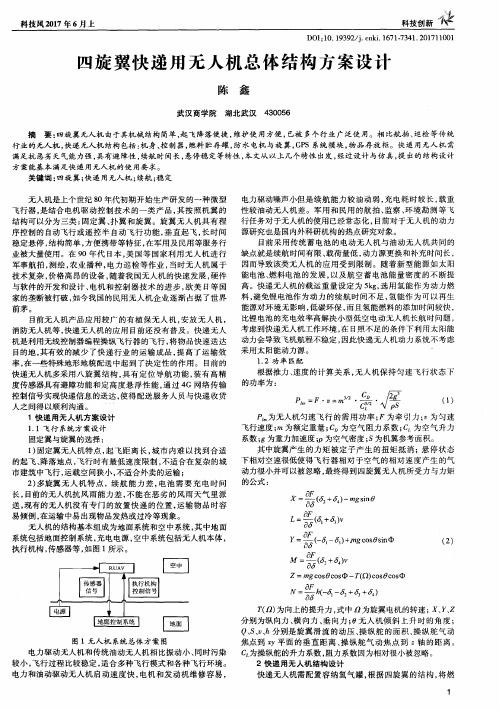
要: 四旋翼 无人机 由于其机械 结构简单 , 起飞 降落便捷 , 维护 使 用方便 , 已被 多个行业 广泛使 用。相 比航 拍、 巡检 等传 统
行业的无人机 , 快递 无人机 结构 包括 : 机 身、 控 制器 , 燃料 贮存罐 , 防水 电机与 旋翼 , G P S系统模块 , 物 品存 放柜。快递 用无人机 需 满足抗 恶劣天 气能 力强 , 具有避 障性 , 续航 时间长 , 悬停稳 定等特性 , 本 文从 以上 几个特性 出发 , 经过设 计与仿真 , 提 出的结构设 计
科技风 2 0 1 7年 6月上
科技创 新
D O I : 1 0 . 1 9 3 9 2 / j . c n k i . 1 6 7 1 - 7 3 4 1 . 2 0 1 7 1 1 0 0 1
四旋 翼 快 递 用 无 人机 总 体 结构 方案 设 计
陈
武汉商学院
鑫
4 3 0 0 5 6
方 案 能 基 本 满足 快 递 用无 人 机 的使 用要 求 。 关键词 : 四旋翼 ; 快 递 用无 人 机 ; 续航 ; 稳 定
电力驱动噪声小但 是续航 能力较 油动 弱 , 充 电耗 时较 长 , 载 重 性较油动无人机 差 。军用 和 民用 的航 拍 、 监 察 、 环境勘 测等 飞 飞行器 , 是结合 电机驱动 控制技 术 的一类产 品, 其按 照机翼 的 行任务对 于无人机 的使用 已经 常态 化 , 目前对 于无人机 的动 力 结构可 以分为三 类 : 固定翼 、 扑翼 和旋 翼 。旋翼 无人 机具 有程 源研究也是 国内外科研机构 的热点研究对象 。 序 控制的 自动飞行或 遥控半 自动 飞行 功能 , 垂直 起 飞, 长 时间 稳 定悬停 , 结 构简单 , 方便携带等特征 , 在军用及 民用等服务行 目前采用传 统蓄 电池的 电动无人机 与油动无 人机共 同的 业 被大量使用 。在 9 O年代 日本 , 美 国等 国家利用 无人 机进 行 缺点就是续航 时间有 限、 载荷量低 , 动力 源更换和补充时间长 , 军事航拍 , 测绘, 农 业播种 , 电力巡检 等作业 , 当时无人机 属于 因而导致该类无 人机 的应用 受到 限制。随着新 型能 源如太 阳 燃料电池的发 展 , 以及航 空蓄 电池能量 密度 的不断 提 技 术复杂 , 价 格高 昂的设备 , 随着我 国无人 机的快速发展 , 硬件 能 电池 、 k g , 选用 氢能作 为动力 燃 与软件 的开发和设计 、 电机 和控制器 技术 的进 步 , 欧美 E t 等 国 高 。快递无人机 的载运 重量设 定为 5 避免锂电池作为动 力 的续 航 时间不 足, 氢 能作 为可 以再 生 家的垄断被打破 , 如今 我国的民用无人机企业 逐渐 占据 了世界 料 , 能 源对 环境无影响 , 低 碳环保 , 而且 氢能燃料的添加时间较快 , 前茅。 目前无人机产 品应用较 广 的有植 保无人 机 , 安放无 人 机 , 比锂 电池 的充 电效率高解决小型低 空电动无人 机长航时问题 ,
小型四旋翼低空无人飞行器综合设计

3、传感器应用
传感器技术在小型四旋翼低空无人飞行器中扮演着重要的角色。通过使用多种 传感器,可以实现飞行器的定位、导航、控制等功能。为了保证数据的准确性 和可靠性,需要对传感器进行定期校准和维护。
实验结果与分析
通过仿真实验,本次演示提出的混合控制方法取得了显著的实验效果。在轨迹 跟踪实验中,飞行器能够快速准确地跟踪给定的轨迹,具有良好的动态性能和 稳定性。此外,通过与单一控制方法的对比实验,本次演示提出的混合控制方 法在跟踪精度和稳定性方面均表现出明显的优势。
结论与展望
本次演示针对四旋翼无人飞行器的非线性控制问题,提出了一种基于鲁棒控制 和滑模控制的混合控制方法。通过仿真实验验证了该方法的有效性。然而,仍 然存在一些不足之处,例如对飞行器的动态特性分析不够准确、控制系统的实 时性有待提高等。
设计思路
1、总体设计
小型四旋翼低空无人飞行器主要由机身、旋翼、遥控器等部分组成。机身采用 轻量化材料制成,以减小飞行器的重量,便于携带;旋翼则由四个电机驱动, 以实现飞行器的稳定飞行;遥控器则用于控制飞行器的飞行轨迹和高度。
2、硬件设计
硬件配置是小型四旋翼低空无人飞行器的核心部分,主要包括电池、传感器、 遥控设备等。电池选用高容量、轻量化的锂离子电池,以延长飞行器的续航时 间;传感器则采用GPS、加速度计、陀螺仪等,以实现飞行器的定位、导航和 控制;遥控设备则选用2.4GHz遥控器,以实现遥控设备的无线传输。
小型四旋翼低空无人飞行器综 合设计
01 引言
03 参考内容
目录
基于STM32的微型四旋翼无人机控制系统设计—软件设计

基于STM32的微型四旋翼无人机控制系统设计—软件设计首先,需要实现的是飞行控制算法。
飞行控制算法主要包括姿态估计和控制器设计两个部分。
在姿态估计中,通过加速度计和陀螺仪等传感器获取四旋翼的姿态信息,并使用滤波算法对数据进行处理,得到稳定的姿态角数据。
常用的滤波算法有卡尔曼滤波器和互补滤波器等。
在控制器设计中,根据姿态角数据和期望姿态角数据,设计合适的控制算法,生成四个电机的输出信号,以控制四旋翼的姿态。
常用的控制算法有PID控制器和模糊控制器等。
其次,需要实现的是传感器数据的获取和处理。
四旋翼无人机通常配备加速度计、陀螺仪、磁力计和气压计等传感器,用于获取飞行状态相关的数据。
通过I2C或SPI等接口将传感器与STM32连接,然后通过相关的驱动程序读取传感器数据。
读取到的数据可以进行校准和滤波等处理,以提高数据的准确性和稳定性。
最后,需要实现的是控制指令的生成和发送。
控制指令的生成主要根据用户输入的期望飞行状态和传感器反馈的实际飞行状态来确定。
例如,用户输入期望的飞行速度和高度等信息,然后通过控制算法和传感器数据计算得到四电机的输出信号,以控制四旋翼实现期望的飞行动作。
生成的控制指令可以通过PWM信号或者CAN总线等方式发送给四旋翼的电调或者电机。
除了上述的基本功能,还可以根据实际需求增加一些辅助功能,如飞行模式切换、状态显示、数据记录和回放等。
这些功能可以通过开发相关的菜单和界面实现,用户可以通过遥控器或者地面站等设备进行相关操作。
总结起来,基于STM32的微型四旋翼无人机控制系统设计软件设计主要包括飞行控制算法的实现、传感器数据的获取和处理、控制指令的生成和发送等几个方面。
通过合理设计和实现上述功能,可以实现四旋翼无人机的稳定飞行和精确控制。
四旋翼无人机控制系统设计与实现
四旋翼无人机控制系统设计与实现四旋翼无人机是一种结构简单、操作灵活的垂直起降无人机。
首先分析了四旋翼无人机的基本运动原理,然后以APM飞控计算机为核心,结合GPS定位芯片、陀螺仪、加速度计、航向计、无线数据电台等装置,进行了微型四旋翼无人机的系统集成。
分析了包括位置回路和姿态回路的双闭环控制结构的四旋翼无人机的控制逻辑与控制规律。
在进行传感器标定、参数整定等工作的基础上,对无人机进行了综合调试。
最终实现了无人机的稳定可靠飞行,具有良好的姿态控制、轨迹控制能力,各项性能指标符合设计要求。
标签:四旋翼无人机;PID控制;飞行控制;姿态控制;轨迹控制Abstract:The four-rotor unmanned aerial vehicle(UA V)is a kind of vertical take-off and landing UA V with simple structure and flexible operation. In this paper,the basic principle of motion of the four-rotor UA V is analyzed,then the APM flight control computer is used as the core,and the GPS positioning chip,gyroscope,accelerometer,heading meter,wireless data radio and other devices are combined. The system integration of micro quad-rotor unmanned aerial vehicle (UA V)is carried out. The control logic and control law of the four-rotor unmanned aerial vehicle (UA V)with double closed-loop control structure including position loop and attitude loop are analyzed. On the basis of sensor calibration and parameter tuning,the UA V is comprehensively debugged. Finally,the UA V can fly stably and reliably,and it has good attitude control and trajectory control ability,and all the performance indexes meet the requirements of design.Keywords:four rotor UA V;PID control;flight control;attitude control;trajectory control1 概述四旋翼無人机是一种非共轴、多旋翼式无人机,改变四个旋翼产生的升力大小就可以实现姿态稳定及飞行控制,其结构简单,体积较小,且飞行平稳、隐蔽性好,可用于救援搜索、侦查监控、探查航拍等任务,具有重要的研究价值和广阔的应用前景[1]。
四旋翼无人机设计与制作毕业论文
四旋翼无人机设计与制作毕业论文摘要:无人机作为一种重要的航空器,具有广泛的应用前景。
本论文以四旋翼无人机为研究对象,通过对其设计与制作的实践,在硬件和软件方面进行详细阐述。
主要包括无人机的结构设计、电路设计以及飞行控制系统的编程。
通过实际测试,验证了该无人机的飞行性能。
关键词:无人机、四旋翼、设计、制作、飞行控制系统第一章引言无人机是一种可以在没有人操控的情况下自主飞行的航空器。
其广泛应用于航拍、农业、交通、救援等领域。
四旋翼无人机作为一种应用广泛的无人机,具有结构简单、稳定性好的特点。
因此本论文以四旋翼无人机为研究对象,旨在通过具体的设计与制作过程探究其相关技术和原理。
第二章无人机的结构设计2.1无人机的基本组成部分2.2机身设计机身的设计要考虑到材料的轻量化和强度的要求。
一般使用轻质的碳纤维材料制作机身,同时增加机身的刚性,提高结构的强度和稳定性。
2.3电机和螺旋桨设计电机是驱动四旋翼无人机飞行的关键器件,其选型要根据负载和飞行需求来确定。
同时,螺旋桨的选择也要考虑到机身的尺寸和重量,以及飞行的稳定性。
第三章无人机的电路设计3.1电路原理图设计根据四旋翼无人机的功能要求,设计相应的电路原理图。
主要包括电源供给电路、电机驱动电路和飞行控制系统。
3.2电路板制作将电路原理图转化为实际的电路板,并通过蚀刻和钻孔等工艺制作出来。
可使用CAD软件进行设计,选择合适的印刷电路板材料,然后通过化学方法蚀刻出电路线路图。
第四章无人机的飞行控制系统的编程4.1控制算法设计无人机的飞行控制系统是其能够自主飞行的关键。
通过对四旋翼无人机的姿态控制、高度控制和速度控制等方面进行算法设计。
4.2编程实现基于设计出的控制算法,利用C语言等编程语言进行实际代码的编写。
通过传感器采集到的数据以及飞行控制系统的指令进行相应的处理,并将处理结果发送给无人机的执行机构(电机)。
第五章实验与结果分析通过将设计好的无人机进行实际测试,对其飞行性能进行验证。
四旋翼无人机毕业设计
四旋翼无人机毕业设计编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望(四旋翼无人机毕业设计)的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为四旋翼无人机毕业设计的全部内容。
渤海大学本科毕业论文(设计)四旋翼无人机设计与制作The Manufacture and Design of Quad Rotor UnmannedAerial Vehicle学院(系):专业:学号:学生姓名:入学年度:指导教师:完成日期:摘要四旋翼无人机飞行器因为它的结构简单,而且控制起来也很方便,因此它成为了近几年来发展起来的热门产业。
在这里本文详细的介绍了四旋翼飞行器的设计和制作的过程,其中包括了四旋翼无人机飞行器的飞行原理,硬件的介绍和选型,姿态参考算法的推导和实现,系统软件的具体实现。
该四旋翼飞行器控制系统以STM32f103zet单片机为核心,根据各个传感器的特点,采用不同的校正方法对各个传感器数据进行校正以及低通数字滤波处理,之后设计了互补滤波器对姿态进行最优估计,实现精确的姿态测量。
最后结合GPS控制与姿态控制叠加进行PID控制四旋翼飞行器的四个电机,来达到实现各种飞行动作的目的。
在制作四旋翼飞行器的过程中,进行了大量的调试并且与现有优秀算法做对比验证,最终设计出能够稳定飞行的四旋翼无人机飞行器。
关键词:姿态传感器;四元数姿态解算; STM32微型处理器;数据融合;PIDThe Manufacture and Design of Quad Rotor Unmanned AerialVehicleAbstractQuad—rotor unmanned aerial vehicle aircraft have a simple structure,and it is very easy to control, so it has become popular in recent years. Here article describes in detail the design and the process of making the four—rotor aircraft,including Quad-rotor UAV aircraft flight principle,hardware introduction and selection,implementation and realization of derivation attitude reference algorithm,the system software 。
四旋翼无人机设计
四旋翼无人机设计四旋翼无人机(Quadcopter)是一种由四个电动马达驱动的无人机,通过分别控制每个马达的转速和方向来实现悬停、飞行和转弯等动作。
四旋翼无人机在农业、电力巡检、安防监控以及航拍等领域有着广泛的应用。
下面将详细介绍四旋翼无人机的设计要点和主要部件。
在结构设计方面,四旋翼无人机的主要部件包括机架、电机、螺旋桨、电调和飞控。
机架通常采用轻质材料(如碳纤维)制成,具有重量轻、刚性强和抗冲击能力好的特点。
电机负责驱动螺旋桨旋转,通常使用无刷电机,其转速和电流特性需要与电调相匹配。
螺旋桨是产生升力的关键部件,选择合适长度和材质的螺旋桨可以提高飞行效率和稳定性。
电调则负责控制电机的转速和方向,将飞控发送的控制信号转化为电机的控制信号。
飞行控制系统设计则是四旋翼无人机最核心的部分。
飞控是指通过传感器、信号处理芯片和控制算法等组成的电子设备,用于检测和响应无人机的姿态、位置和运动状态。
常见的飞控系统有飞行控制器(Flight Controller)和惯性测量单元(Inertial Measurement Unit,简称IMU)。
飞行控制器是无人机的“大脑”,负责接收遥控器、GPS和其他传感器的信号,并发送控制指令给电机和电调。
IMU包括加速度计和陀螺仪,用于测量无人机的加速度和角速度,从而实现对姿态和运动的控制。
载荷系统设计根据应用需求而定,可以包括相机、传感器和机械臂等。
载荷系统需要与飞行控制系统进行数据交互,并能够通过控制指令实现相应的操作。
总之,四旋翼无人机的设计需要考虑结构、电力、飞行控制和载荷系统等多个方面。
合理选择和设计各个部件,同时优化飞行控制算法和传感器配置,可以提高无人机的性能和稳定性,实现更多的功能和应用。
基于STM32的四旋翼无人机设计
基于STM32的四旋翼无人机设计在本文中,我们将会介绍基于STM32的四旋翼无人机设计,包括硬件设计、软件开发和飞行控制等方面。
一、硬件设计1. 传感器模块在四旋翼无人机中,传感器模块的设计非常重要,主要包括陀螺仪、加速度计、磁力计和气压计等传感器。
这些传感器可以用于测量无人机的姿态角、加速度、磁场强度和气压,从而实现飞行控制和稳定性。
在STM32的硬件设计中,可以选择常见的MPU6050、HMC5883L、MS5611等传感器作为传感器模块,并通过I2C或SPI接口与STM32连接,实现传感器数据的采集和处理。
2. 无刷电机驱动模块四旋翼无人机的推进力主要来自四个无刷电机,因此无刷电机驱动模块的设计非常关键。
在STM32的硬件设计中,可以选择常见的电调模块(如BLHeli系列)作为无刷电机驱动模块,通过PWM信号控制电机的转速和转向。
还需要考虑电机与电调模块的连接方式和供电方式,以保证无人机的稳定飞行。
3. 通信模块通信模块是无人机与地面站或其他设备进行数据传输的重要组成部分。
在STM32的硬件设计中,可以选择常见的2.4G/5.8G数传模块(如NRF24L01、XBee、HC-12等)作为通信模块,通过串口与STM32连接,实现无人机与地面站的数据交换和控制。
二、软件开发1. 飞行控制算法飞行控制算法是无人机的灵魂,直接影响无人机的飞行性能和稳定性。
在基于STM32的四旋翼无人机设计中,可以采用常见的PID控制算法,通过对传感器采集的数据进行处理,控制无刷电机的转速和姿态角,实现无人机的稳定飞行。
还可以结合卡尔曼滤波算法对传感器数据进行融合和处理,提高飞行控制系统的精度和稳定性。
2. 地面站软件地面站软件是无人机与操作员进行交互的重要工具,主要用于监控无人机的状态、下达飞行任务和参数设置等功能。
在基于STM32的四旋翼无人机设计中,可以开发PC端或移动端的地面站软件,通过串口或数传模块与无人机进行数据交换和控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3 四旋翼无人机硬件系统设计 ......................................................................................... 9
3.1 微惯性组合系统传感器组成 ............................................................................... 9
3.1.1 MEMS 陀螺仪传感器................................................................................ 9
3.4.2 电机和电机驱动模块 ............................................................................. 12
3.4.3 机架和螺旋桨的选型 ............................................................................. 13
4.1.2 PID 控制算法设计 ................................................................................... 17
5 飞行器试验 ................................................................................................................... 19IIFra bibliotek目 录
1 绪论 ................................................................................................................................. 1
1.1 研究背景及意义 ................................................................................................... 1
5.1.2 试飞实验注意事项 ................................................................................. 19
5.2 试飞内容及结果 ................................................................................................. 20
3.1.2 MEMS 加速度计传感器............................................................................ 9
3.1.3 三轴数字罗盘传感器 ............................................................................... 9
飞行原理入手,设计了飞行器的硬件系统,其中包括各类传感器,并依据 PID 算法
实现飞行器自稳,接着进行了飞行调试。本次设计选用的飞控是以 STM32 芯片作为
核心,根据各传感器不同的特征,采用不近相同的校正方式对飞行器其中包含的各
个传感器所显示的数据进行更正。最后运用 PID 算法对这些数据进行组合,通过改
aerobatics. In the design and production of the four rotor UAV step In this paper, a lot of
debugging is carried out, and compared with the existing excellent attitude algorithm, and
4.1 系统程序设计 ..................................................................................................... 16
4.1.1 姿态系统软件设计 ................................................................................. 16
then verified, and finally produced a four rotor aircraft capable of continuous and stable
flight operations
Key Words:MEMS Sensor; STM32 Processor; Data Fusion;PID
3.4 其它硬件模块 ..................................................................................................... 12
3.4.1 无线通信模块 ......................................................................................... 12
编
码
专业代码
本科毕业设计
四旋翼无人机设计
学
院
机械工程学院
专
业
机械设计制造及自动化
学
号
4113010612
学生姓名
余涛涛
指导教师
袁永超
提交日期
2017 年 5 月 20 日
2017-JXSJ
080202-208
诚
信
承
诺
书
本人郑重承诺和声明:
我承诺在毕业论文撰写过程中遵守学校有关规定,恪守学
术规范,此毕业论文(设计)中均系本人在指导教师指导下独立
four rotor UAV, the flight hardware the specific debugging and selection, cascade PID
algorithm and system software. The selected four rotor UAV control system is based on
3.2 姿态测量系统传感器选型 ................................................................................. 10
3.3 电源系统设计 ..................................................................................................... 11
very convenient, so it's become a hot industry in recent years. This paper introduces the
design and production of the four rotor UAV, in which contains the principle of flight
displayed. Finally using PID algorithm for the combination of these data, and then control
four motor rotor four, and then to implement various aircraft flight maneuvers and
5.2.1 地面静态实验测试 ................................................................................. 20
5.1 飞行试验准备 ..................................................................................................... 19
5.1.1 试飞平台组成 ......................................................................................... 19
1.2.2 国内研究现状 ........................................................................................... 2
1.3 本文研究内容和方法 .................................................................................. 3
STM32 microcontroller as the core, in accordance with the characteristics of each sensor,
the correction is not nearly the same correction for each aircraft sensor contains the data
完成,没有剽窃、抄袭他人的学术观点、思想和成果,没有篡改
研究数据,凡涉及其他作者的观点和材料,均作了注释,如有违