最高效的四旋翼无人机数据采集建模
四旋翼无人机系统设计
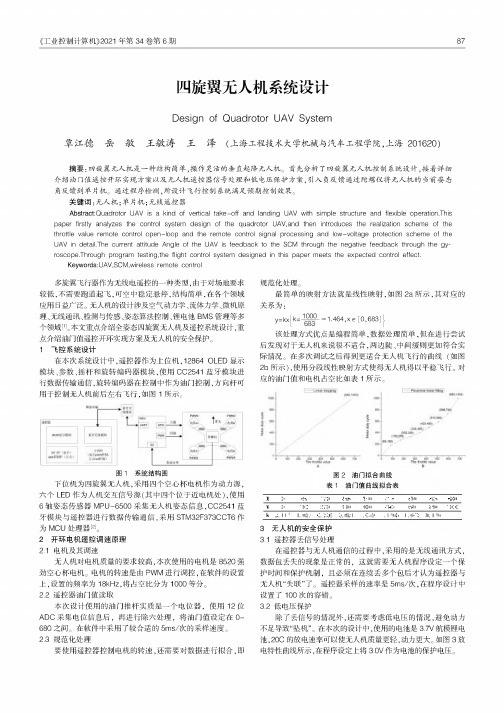
《工业控制计算机》2021年第34卷第6期87四旋翼无人机系统设计Des ign of Quadrotor UAV System覃江德岳敏王敏涛王泽(上海工程技术大学机械与汽车工程学院,上海201620)摘要:四旋翼无人机是一种结构简单,操作灵活的垂直起降无人机。
首先分析了四旋翼无人机控制系统设计,接着详细介绍油门值遥控开环实现方案以及无人机遥控器信号处理和低电压保护方案,引入负反馈通过陀螺仪将无人机的当前姿态角反馈到单片机。
通过程序检测,所设计飞行控制系统满足预期控制效果。
关键词:无人机;单片机;无线遥控器Abstract:Quadrotor UAV is a k i nd of vert ical take-off and land i n g UAV w i t h s i m ple structure and flex i ble operat i o n.Th i s paper firstly analyzes the control system des i g n of the quadrotor UAV,and then introduces the real i z at i o n scheme of the throttle value remote control open-loop and the remote control s i g nal process i n g and low-voltage protect i o n scheme of the UAV in deta i l.The current att i t ude Angle of the UAV is feedback to the SCM through the negat i v e feedback through the gy-roscope.Through program test i n g,the fl i g ht control system des i g ned in th i s paper meets the expected control effect.Keywords:UAV,SCM,w i r eless remote control多旋翼飞行器作为无线电遥控的一种类型,由于对场地要求较低,不需要跑道起飞,可空中稳定悬停,结构简单,在各个领域应用日益广泛。
最高效的四旋翼无人机数据采集建模
最高效的四旋翼无人机数据采集建模一、简介近年来,微小型四翼无人机已经成为了无人飞行器研究领域的一个热点。
它结构简单、机动性强、便于维护,能够在空中悬停、垂直起飞和降落。
在军用和民用方面具有较大的潜在应用价值,国内外许多研究单位纷纷致力于四旋翼无人机飞行控制的架构设计与飞行控制研究,以实现四旋翼无人机的自主飞行。
机载传感器系统是四旋翼无人机飞行控制系统的重要组成部分,它为机载控制系统提供可靠的飞行状态信息,是实现四旋翼无人机自主飞行的重要设备。
现在无人机应用最广的是倾斜摄影技术优势或者说最吸引用户的,就是利用倾斜摄影技术可以全自动、高效率、高精度、高精细的构建地表全要素三维模型。
二、四旋翼无人机特点1、机动性能灵活,低空性能出色。
能在城市、森林等复杂环境下完成各种任务。
可完成空中悬停监视侦查。
实现对动力要地低,能在狭小空间穿行,能垂直起降,对起降环境要求低。
2、对动力要求较小,产生的噪音低,隐蔽性能高,安全性能出色。
四旋翼无人机采用四个马达提供动力,可使飞行更加稳定和精确。
3、结构简单,运行、控制原理相对容易掌握。
4、成本较低,零件容易更换,维护方便。
三、飞行软件目前无人机种类繁多,针对无人机开发的飞控软件也有很多,目前比较好用的是DJI GS Pro、DJI GO4、Litchi Vue、Pix4d等。
四、数据采集,使用DJI GS pro1、打开DJI GS pro软件,点击新建任务2、点击测绘航拍区域模式3、点击地图选点(飞行定点比较耗飞机电量,无特殊情况建议不使用)4、点击屏幕就会出现一个航测区域,手动拖拽四个定点可以改变航测的面积和形状,同时也可以手动增加拐点,让航测面积更加的灵活多样。
并且在右边的菜单栏里选择好对应的云台相机;设置好任务的高度,任务的高度和拍摄的清晰度,成图的分辨率有很大的关系;大面积的时候尽量选择等时间拍照,因为能上传的航点是有限的。
5、点击进入右侧菜单的高级选项之中,重新设置一下航测的重叠了,一般航向和旁向重叠率是700%和70%(最好不要低于70%);设置好云台俯仰角,正射影像图一般为-90°,拍摄3D立体时一般为-45°;设置好返航高度,确保返航时不会碰撞到障碍物。
四旋翼无人机的数学模型控制及操作原理
四旋翼无人机的数学模型控制及操作原理作者:吕传庆陈琪马云波董珮璠摘要:本文对选择四旋翼无人机为研究对象,用数学建模的方法对其动力及运动状态进行分析,对所建动力学模型上进行PID算法控制,仿真结果很好模拟了真实环境下无人机的飞行姿态。
关键字:四旋翼,建模,PID算法。
引言:无人机的发展现状及未来趋势:无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。
在军事上及民用上均有深入发展。
军事上以其体积小、重量轻、机动性好、飞行时间长和便于隐蔽为特点,适合于执行危险性大的任务,已逐渐成为新世纪军事竞争的制高点之一,随着信息时代的发展,现代信息化战争正朝着高精度,高杀伤,高重复利用,隐蔽性方面发展,无人机以其特殊优势很好适应了未来战争中提出的要求,正发挥着越来越大的作用,成为军队实现信息化作战及特种作战的有力武器。
能研制高精尖无人机的国家屈指可数,其中美国处于领先地位,作战无人机包括RQ-1捕食者”,”MQ-9“死神”(Reaper),RQ-5“猎手”等;侦察机包括RQ-4A“全球鹰”,RQ-8A“火力侦察兵”等。
美国曾在伊拉克战争,阿富汗战争中用无人机完成各种监视侦查,目标指示等任务,提供大量情报支持,表现突出,有力的减小了美军伤亡,因此无人机受到美军军事部门高度重视。
现已发展至舰载无人机x-47b。
中国无人机水平也处于世界领先水平,以能研制各种功能齐全的无人机。
如三角翼布局的暗剑无人机,和与捕食者无人机相当的翼龙、彩虹系列无人机。
其中彩虹系列无人机和翼龙系列无人机不但在本国服役,还成功出口到中东及非洲国家,例如伊拉克,埃及,阿联酋。
并在伊拉克投入到对于极端组织的打击,完成了首次实战。
在民用方面,无人机还广泛用于农业,通信救灾,地形勘探等方面。
如今互联网时代的到来,网购成为越来越多90后的选择。
无人机在快递行业局域光辉前景,无人机的发展将给快递行业带来革命性变化。
所以无人机行业的发展无论对于军队装备发展还是经济发展均具有重要意义。
基于STM32的四旋翼无人机设计

基于STM32的四旋翼无人机设计无人机技术的发展已经逐渐成为科技领域的热门话题,而四旋翼无人机则是其中一种应用广泛的无人机类型。
它可以应用于农业、航拍、物流等各种领域,具有很大的市场潜力。
本文将介绍基于STM32的四旋翼无人机设计,讨论其硬件构架和软件系统,希望可以为无人机爱好者提供一些技术方面的参考和帮助。
一、硬件构架1. 电机和螺旋桨四旋翼无人机采用四个电机驱动四个螺旋桨来产生上升力和姿态控制。
选择合适的电机和螺旋桨对于无人机的飞行性能至关重要。
电机需要具备足够的功率和转速来推动螺旋桨产生足够的升力,并且要求响应速度快,可以方便地实现姿态控制。
螺旋桨的尺寸、材质和设计也需要仔细选择和匹配,以确保其具有良好的气动性能和结构强度。
在选用电机和螺旋桨时,还需要考虑整机的配比和平衡,以保证无人机的飞行平稳性和操控性。
2. 传感器系统无人机的传感器系统是其智能化和自主飞行的关键。
常见的传感器包括陀螺仪、加速度计、罗盘、气压计等。
这些传感器可以实现无人机的姿态感知、空间定位和高度控制等功能,从而保证无人机的飞行稳定性和精准性。
在选择传感器时,需要考虑其精度、响应速度、通信接口和适应环境等因素,以保证传感器系统可以满足无人机的实际飞行需求。
3. 控制系统基于STM32的四旋翼无人机设计通常采用飞控主板来实现飞行控制和数据处理。
飞控主板集成了微处理器、传感器接口、无线通信模块等功能,可以实现无人机的自主控制和遥控操作。
在设计控制系统时,需要考虑飞行控制算法、通信协议、数据处理速度等因素。
飞控主板还可以通过扩展接口连接其他外围设备,如GPS模块、避障传感器、摄像头等,实现更丰富的功能和应用。
二、软件系统1. 飞行控制算法飞行控制算法是基于传感器数据和飞行器状态信息,实现对电机转速和螺旋桨姿态的智能控制。
常见的飞行控制算法包括PID控制、自适应控制、模糊控制等。
这些算法可以根据无人机的动力学特性和环境变化,实现稳定的姿态控制、高效的空间定位和精准的高度控制。
基于STM32的微型四旋翼无人机控制系统设计—软件设计

基于STM32的微型四旋翼无人机控制系统设计—软件设计首先,需要实现的是飞行控制算法。
飞行控制算法主要包括姿态估计和控制器设计两个部分。
在姿态估计中,通过加速度计和陀螺仪等传感器获取四旋翼的姿态信息,并使用滤波算法对数据进行处理,得到稳定的姿态角数据。
常用的滤波算法有卡尔曼滤波器和互补滤波器等。
在控制器设计中,根据姿态角数据和期望姿态角数据,设计合适的控制算法,生成四个电机的输出信号,以控制四旋翼的姿态。
常用的控制算法有PID控制器和模糊控制器等。
其次,需要实现的是传感器数据的获取和处理。
四旋翼无人机通常配备加速度计、陀螺仪、磁力计和气压计等传感器,用于获取飞行状态相关的数据。
通过I2C或SPI等接口将传感器与STM32连接,然后通过相关的驱动程序读取传感器数据。
读取到的数据可以进行校准和滤波等处理,以提高数据的准确性和稳定性。
最后,需要实现的是控制指令的生成和发送。
控制指令的生成主要根据用户输入的期望飞行状态和传感器反馈的实际飞行状态来确定。
例如,用户输入期望的飞行速度和高度等信息,然后通过控制算法和传感器数据计算得到四电机的输出信号,以控制四旋翼实现期望的飞行动作。
生成的控制指令可以通过PWM信号或者CAN总线等方式发送给四旋翼的电调或者电机。
除了上述的基本功能,还可以根据实际需求增加一些辅助功能,如飞行模式切换、状态显示、数据记录和回放等。
这些功能可以通过开发相关的菜单和界面实现,用户可以通过遥控器或者地面站等设备进行相关操作。
总结起来,基于STM32的微型四旋翼无人机控制系统设计软件设计主要包括飞行控制算法的实现、传感器数据的获取和处理、控制指令的生成和发送等几个方面。
通过合理设计和实现上述功能,可以实现四旋翼无人机的稳定飞行和精确控制。
X型四旋翼无人机建模及四元数控制
X型四旋翼无人机建模及四元数控制
丁少宾;肖长诗;刘金根;文元桥
【期刊名称】《系统仿真学报》
【年(卷),期】2015(0)12
【摘要】对X型四旋翼无人机做了合理假设以及受力分析,推导并建立了X型四旋翼无人机全面的动力学数学模型,考虑了无人机平动、转动空气阻力,并且将转子、螺旋桨和机体看成多刚体系统。
在Solidworks软件中,建立了无人机实物模型以获得无人机惯性参数。
直接以四元数作为反馈控制量,设计出多通道双回路矢量PD 控制系统。
以Matlab/Simulink为平台,对四元数反馈控系统和欧拉角反馈控制系统进行对比控制仿真。
从仿真结果来看,这2种反馈模式都能对无人机模型进行位置、姿态跟踪等控制,但是四元数反馈控制系统具有过渡时间短、计算量少以及无奇点产生的优点。
【总页数】6页(P3057-3062)
【作者】丁少宾;肖长诗;刘金根;文元桥
【作者单位】湖北省内河航运技术重点实验室;武汉理工大学信息工程学院光纤传感技术与信息处理教育部重点实验室
【正文语种】中文
【中图分类】V249.1
【相关文献】
1.四旋翼无人机建模与PID控制器设计
2.超/特高压输电线路巡检四旋翼无人机的建模与回馈递推控制
3.自主巡线四旋翼无人机建模及姿态控制器设计
4.四旋翼无人机的控制原理及建模
5.带单关节机械臂四旋翼无人机的建模与控制
因版权原因,仅展示原文概要,查看原文内容请购买。
基于STM32的四旋翼无人机智能控制方法设计
基于STM32的四旋翼无人机智能控制方法设计四旋翼无人机是一种应用广泛的无人机类型,它由四个同心排列的旋翼组成,能够提供稳定的飞行能力。
在基于STM32的四旋翼无人机智能控制方法设计中,我们需要考虑飞行稳定性、遥控操控能力以及自动控制能力等方面。
首先,为了保证飞行的稳定性,我们可以采用PID控制方法。
PID控制器由比例(P)、积分(I)和微分(D)三个部分组成,可以根据飞行状态的误差来调整旋翼的转速。
通过调整PID参数,可以使得飞行器能够更好地保持平衡。
在STM32上,我们可以通过编程来实现PID控制器,并将其与四个旋翼的电机连接起来。
其次,为了实现遥控操控能力,我们可以利用STM32的GPIO口和UART通信接口来实现无人机与遥控器之间的通信。
遥控器通过按键或摇杆等控制方式发送信号给STM32,STM32将接收到的信号解码后,将其转化为相应的控制指令,再发送给飞行器的电机。
利用STM32的中断功能,我们可以实现快速响应遥控指令的功能,使得飞行体验更加流畅。
最后,为了提高无人机的自动控制能力,我们可以加入一些传感器,例如陀螺仪、加速度计和姿态传感器等。
这些传感器可以实时感知无人机的飞行状态,例如俯仰角、滚转角和偏航角等。
通过将传感器的数据传输给STM32,我们可以根据具体的飞行算法来实现自动控制功能,例如自动起飞、自动降落和自动悬停等。
在基于STM32的四旋翼无人机智能控制方法设计中,我们需要结合硬件设计和软件设计。
硬件方面,我们需要设计电机驱动电路、通信电路和传感器接口电路等。
软件方面,我们需要进行编程,实现PID控制算法、遥控通信协议和传感器数据处理算法等。
综上所述,基于STM32的四旋翼无人机智能控制方法设计是一个复杂的系统工程,需要考虑飞行稳定性、遥控操控能力和自动控制能力等方面的要求。
通过合理的硬件设计和软件编程,我们可以实现一个功能强大、性能优越的四旋翼无人机。
微小型四旋翼无人直升机建模及控制方法研究_61_65
微小型四旋翼无人直升机主要处于悬停飞行状态,其姿态角变化范围比较小;此外, 我们认为 MIMU 具有良好的线性特性。因此,标度因数误差和不对称性误差都可以忽略, 传感器误差包括:安装误差 Rinstall 、漂移误差 Δ 和 Gauss 白噪声 w 。 根据以上分析,传感器量测值(measurement)与真实值(actual)之间有如下关系:
型准确性尚需验证,因此有必要通过在实际系统上进行系统辨识,得出能与数学模型相比 较的辨识模型。
2、控制器设计及实现。论文中提出的控制器设计都是基于连续系统的,而实际的系
统控制器设计必须基于离散系统进行,因此有必要针对实际系统设计进行进一步研究。
3、其它智能控制方法。不论是数学模型还是辨识模型,都不能完整地反映微小型四
加速度附加到传感器量测值中去。 将式(2.60) 、 (2.62)代入(5.33)和(5.34)可得:
(5.34)
其中, β 为加速度计安装方向与体坐标系之间的偏差,它将导致机体转动引起的离心
⎛ ⎡1 0 ⎡ p meas ⎤ ⎜ ⎢q ⎥ = R ⎜⎢ cos φ install ⎢0 ⎢ meas ⎥ ⎜ ⎜⎢ ⎢ ⎣ rmeas ⎥ ⎦ ⎝ ⎣0 − sin φ
1、综述了微小型四旋翼无人直升机的研究现状及相关技术,论述了开展这方面研究
的重要意义。
2、建立了微小型四旋翼无人直升机的数学模型。针对自行研制的微小型四旋翼无人
直升机原型样机,对其旋翼空气动力学、动力系统和刚体动力学进行数学建模,推导出了 全状态非线性系统方程,并将之变换为仿射非线性形式。 针对微小型四旋翼无人直升机的欠驱动特性, 设计了基于 Backstepping 的飞行控制 3、 算法。仿真实验表明该方法能够实现微小型四旋翼无人直升机定点悬停和轨迹跟踪飞行控 制,并具有一定鲁棒性。
四旋翼动力学建模
四旋翼动力学建模一、引言四旋翼无人机是近年来飞行器领域的热门话题,其广泛应用于农业、环保、安全监控等领域。
为了更好地掌握四旋翼的运动规律,需要对其进行建模分析。
本文将介绍四旋翼动力学建模的基本原理和方法。
二、四旋翼结构和工作原理1. 四旋翼结构四旋翼主要由机身、电机、螺旋桨和控制系统等组成。
其中,机身是支撑整个飞行器的主体部分,电机驱动螺旋桨产生升力,控制系统负责调节电机转速和方向。
2. 四旋翼工作原理四旋翼通过调节各个螺旋桨的转速和方向来实现飞行姿态调整和位置控制。
当四个螺旋桨转速相等时,飞行器保持平衡状态;当某一侧或某一角度需要调整时,相应螺旋桨的转速会发生变化以产生所需的力矩。
三、四旋翼运动学建模1. 坐标系选择在进行运动学建模时,需要选择合适的坐标系。
通常选择惯性坐标系和机体坐标系。
惯性坐标系是固定不动的,用于描述四旋翼在空间中的位置和速度;机体坐标系则随着四旋翼运动而改变,用于描述其姿态。
2. 姿态表示四旋翼的姿态通常用欧拉角表示。
欧拉角包括滚转角、俯仰角和偏航角,分别表示飞行器绕x、y、z轴旋转的角度。
3. 运动方程根据牛顿第二定律和欧拉定理,可以得到四旋翼的运动方程。
其中,力和力矩来自于螺旋桨产生的升力和扭矩,阻力主要来自于空气阻力和重力。
四、四旋翼动力学建模1. 动力学方程四旋翼的动力学方程可以通过牛顿第二定律和欧拉定理推导得到。
其中,电机输出扭矩与电机转速成正比;螺旋桨产生升力与螺旋桨转速的平方成正比。
2. 状态空间模型将四旋翼的动力学方程转化为状态空间模型可以方便地进行控制设计和仿真分析。
状态空间模型包括状态向量、输入向量和输出向量,其中状态向量包括四旋翼的位置、速度和姿态等状态变量。
3. 控制系统设计四旋翼的控制系统通常采用PID控制器。
PID控制器由比例、积分和微分三个部分组成,用于调节电机转速和方向以实现飞行姿态调整和位置控制。
五、结论本文介绍了四旋翼动力学建模的基本原理和方法。
多四旋翼飞行器系统的建模方法
一、概述多四旋翼飞行器(Multirotor UAV)作为一种重要的无人飞行器系统,在军事侦察、地质勘探、紧急救援等领域具有广泛的应用前景。
对多四旋翼飞行器系统的建模方法进行研究,对提高其飞行性能和可靠性具有重要意义。
二、多四旋翼飞行器动力学建模方法1. 多物理场仿真方法多物理场仿真方法利用多种计算方法和理论,将动力学、控制和环境等多个物理场耦合在一起,进行多物理场仿真。
这种方法能够更加全面地考虑多四旋翼飞行器在不同环境下的飞行性能,并对其进行有效的建模分析。
2. 控制方程建模通过建立多四旋翼飞行器的动力学方程和控制方程,分析其在不同环境和工况下的飞行特性。
这种方法能够深入理解多四旋翼飞行器的控制机理,为其飞行性能提升和控制系统优化提供理论基础。
三、多四旋翼飞行器仿真建模方法1. 计算流体动力学仿真利用计算流体动力学仿真方法对多四旋翼飞行器进行空气动力学分析,模拟飞行器在不同飞行状态下的气动特性。
这种方法能够帮助设计人员优化飞行器的外形结构和气动布局,提高其飞行性能和稳定性。
2. 有限元分析通过有限元分析方法对多四旋翼飞行器的结构进行仿真建模,分析其在重力、风载等作用下的应力和变形情况。
这种方法可以有效评估飞行器的结构强度和刚度,为其设计和改进提供理论依据。
四、多四旋翼飞行器控制系统建模方法1. 状态空间建模采用状态空间建模方法对多四旋翼飞行器的控制系统进行建模,分析其在不同控制策略下的动态特性。
这种方法能够帮助设计人员理解飞行器的控制机理,优化控制系统结构和参数设置。
2. 控制系统仿真利用控制系统仿真软件对多四旋翼飞行器的控制系统进行仿真建模,模拟其在不同飞行状态和外部干扰下的动态响应和稳定性。
这种方法能够帮助设计人员验证控制系统的性能,并对其进行优化改进。
五、多四旋翼飞行器系统建模方法的发展趋势1. 多尺度仿真方法多尺度仿真方法能够将不同层次的建模和仿真结果进行耦合,全面分析多四旋翼飞行器系统在不同物理场和尺度下的性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
最高效的四旋翼无人机
数据采集建模
CKBOOD was revised in the early morning of December 17, 2020.
最高效的四旋翼无人机数据采集建模
一、简介
近年来,微小型四翼无人机已经成为了无人飞行器研究领域的一个热点。
它结构简单、机动性强、便于维护,能够在空中悬停、垂直起飞和降落。
在军用和民用方面具有较大的潜在应用价值,国内外许多研究单位纷纷致力于四旋翼无人机飞行控制的架构设计与飞行控制研究,以实现四旋翼无人机的自主飞行。
机载传感器系统是四旋翼无人机飞行控制系统的重要组成部分,它为机载控制系统提供可靠的飞行状态信息,是实现四旋翼无人机自主飞行的重要设备。
现在无人机应用最广的是倾斜摄影技术优势或者说最吸引用户的,就是利用倾斜摄影技术可以全自动、高效率、高精度、高精细的构建地表全要素三维模型。
二、四旋翼无人机特点
1、机动性能灵活,低空性能出色。
能在城市、森林等复杂环境下完成各种任务。
可完成空中悬停监视侦查。
实现对动力要地低,能在狭小空间穿行,能垂直起降,对起降环境要求低。
2、对动力要求较小,产生的噪音低,隐蔽性能高,安全性能出色。
四旋翼无人机采用四个马达提供动力,可使飞行更加稳定和精确。
3、结构简单,运行、控制原理相对容易掌握。
4、成本较低,零件容易更换,维护方便。
三、飞行软件
目前无人机种类繁多,针对无人机开发的飞控软件也有很多,目前比较好用的是DJI GS Pro、DJI GO4、Litchi Vue、Pix4d等。
四、数据采集,使用DJI GS pro
1、打开DJI GS pro软件,点击新建任务
2、点击测绘航拍区域模式
3、点击地图选点(飞行定点比较耗飞机电量,无特殊情况建议不使用)
4、点击屏幕就会出现一个航测区域,手动拖拽四个定点可以改变航测的面积和形状,同时也可以手动增加拐点,让航测面积更加的灵活多样。
并且在右边的菜单栏里选择好对应的云台相机;设置好任务的高度,任务的高度和拍摄的清晰度,成图的分辨率有很大的关系;大面积的时候尽量选择等时间拍照,因为能上传的航点是有限的。
5、点击进入右侧菜单的高级选项之中,重新设置一下航测的重叠了,一般航向和旁向重叠率是700%和70%(最好不要低于70%);设置好云台俯仰角,正射影像图一般为-90°,拍摄3D立体时一般为-45°;设置好返航高度,确保返航时不会碰撞到障碍物。
6、点击右上角飞机左边更多选项,点击高级设置(地图优化限中国大陆地区使用打开);这点也是最关键的一点,这时候一定要点开中国大陆这个选项,不然飞行器的位置是偏移的。
会导致航测任务区域整体偏移,有一部分任务没有拍摄到。
7、检查任务没有问题后,点击右上角的飞机按钮,程序开始上传任务和自检,通过后就可以点击飞行了。
8、整个任务过程都是全自动的,包括起降,任务完成后,左边菜单的任务变成一个旗子的标志证明任务已经完成。
五、数据上转
当我们采集好数据后,需要上传建模,可以登录“如初三维重建”平台,免费注册个账号,就可以开始上传建模了,因为我发现这个平台很好用,建模时,只需要三个步骤,无需认为过多的调参数(不像smart3D和photoscan那么复杂),模型效果也比较好。
当模型建好后,还可以分享至朋友圈,让朋友们也可以观看自己的作品,所以飞友们可以试一下。
1、建立项目名称
2、上传照片
3、照片上传完后,点击开始建模
完成这三个步骤后,等待模型出来就可以了,即不占计算机资源,又简单方便。
我说的这些,但愿能帮你们解决到建模的难点。