基于有理函数的路面不平度时域模型研究
路面对汽车激励的时域模型建立及计算机仿真

第11卷 第3期1998年7月中 国 公 路 学 报China Journal of Highway and T ransportVol.11 N o.3July1998路面对汽车激励的时域模型建立及计算机仿真*檀润华[河北工业大学计算中心,天津,300130] 陈 鹰[浙江大学]路甬祥[中国科学院]摘 要:应用已有幂函数功率谱的数据确定了有理函数功率谱的参数,建立了一般路面及离散事件对汽车单点及单轮辙激励的时域模型,并对该模型进行了仿真。
关键词:汽车,路面激励,数学模型,仿真中图分类号:U461The Mathematical Models in Time Domain forthe Road Disterbances and the SimulationTa n Runhua¹ Chen Ying Lu Yongxiang[¹Computat ional Cent re,Hebei U niver sity of Technology,Tianjin,300130]Abstr act:T he power spectr al densities which existed in the form of power law are used to deter mine the parameters of the power spectral densities in the r ational form.T he mathe-matical models in the time domain for the r oad disturbances which include random road disturbances and discrete event road disturbances are developed.The computer simulation for the models is also carried out.Key wor ds:Vehicle,Road disturbances,Mathematical models,Computer simulation汽车运行时,不平路面度激励使其产生振动。
车辆左右车轮路面不平度的时域再现研究_任宏斌

()
间频率为 n 0 时 的 路 面 功 率 谱 密 度 ,称 为 路 面 不 平 单位为 m ; 度系数 , w 为 频 率 指 数 ,反 映 了 路 面 谱 的频率结构 , 一般情况下取 w=2; n 表示空间频率 ,
3
根据傅里叶 变 换 的 上 述 性 质 , 对Q k 进行傅里 叶逆变 换 , 可以得到随机路面不平度的空间离散 值为
j φ k …, )( Q k = 0, 1, N -1 7) ( k = Q k e , ] 式中 φ 上的正态分布 . 0, 2 π k 服从 [
n -w 烄 G n n∈ ( n n 0) 1, 2) q( n0 ( G n)= 烅 . 1) q( ( , ) 0 n n n 1 2 烆 -1 , ; 式中 : 为空间参考频率 为在空 n =0 . 1m G n 0 0) q(
.
对路 面 时 域 随 机 激 励 的 模 拟 方 法 有 很 多 种 , 如
ቤተ መጻሕፍቲ ባይዱ
收稿日期 : 2 0 1 2 0 5 0 3 - - ) 基金项目 :国家部委预研项目 ( 1 0 3 0 0 2 0 2 2 0 7 0 1 , : 作者简介 :任宏斌 ( 男, 博士生 , 1 9 8 7—) E-m a i l r e n h o n b i n 2 1 0 6@1 2 6. c o m. g , : 通信作者 :陈思忠 ( 男, 教授 , 博士生导师 , 1 9 5 8—) E-m a i l c h e n s z i t . e d u. c n. @b
7] 拟合如下 [
Q k =
, …, ) G ( n) k = 0, 1, N -1 ( 2 l Δ 槡
q k
N
( 6) ) 得 到 的 是 随 机 路 面 谱 的 幅 值 信 息 .因 为 6 式 ( 用功率谱密度描述随机路面时忽略了路面不平度的 相位信息 , 所以在复现时域随机路面时 , 要人为地加 入路面相位信息 .统计结果表明随机路面的相位服 于是得到q 从正态分布 .设相位角为 φ k, m 的傅里叶 变换离散值
路面时域波形的数学模型与再现研究
p ro ma c fte a tm o i y a c .Th v rie o o d r u hls k ste rd rom a c n a iuae ef r n e o h u o b l d n mis e e o esz fr a o g r s ma e ie p fr n e a d m np lt e h e
h m a s uc n u nr o rea dm aeil e o re S .h e tra s u c . o t em o e’ c ua yo t r d l a c rc fhep v me t ly ni p an t" eo tersa c n S a e n p a sa m o n 1 n h e e rho Ol a tmo i y a is T i a e nt d c st uo bl ed n m c . h sp p ri r u e hee p e so o r a u h e sa d teme o o m a e t a mo e b u o x rsin f o dr g n s n h o h t d f t mai l d l o t h c a p v m e tt ewa e b s d o a e n i v a e n AR d 1 te e eo e s f ae o c n tu t g te s n a d p v m e tt ewa e m mo e. n d v lp t o w r fr o srci t d r a e n i v h h t e n h a m a c r igt c o d AR d e. d smuaee ey lv l a e e t x d i n o mo 1a i lt v r e e v n p m n e GB7 3 —- 7 T er s l idc tsta:h sm o e  ̄1 i f n 0 1 8 . h utn ia t ti d lE1 e e h 3
基于Simulink的路面不平度时域模型仿真研究.

wa e a i gmo e o l e e ae te t — o i o d ru h e si emso i ee o d c n iin n e il p e sT e e p rme tlrs Is v ddn d lc ud g n rt h i me d man ra g n s n tr fdf rntra o d t sa d v hce s e d h x e i na eut o o
.
【 要】 摘 时域路 面不平度 建模 对轮椅振 动分析 具有重要 意义。对 G / 0120 BT 73— 05中提 出的路 面功率谱密度表达式及等分方法 应 用 线 性 滤波 法与谐 波叠加 法分别 重构路 面不平度模型 , 用周期 图谱估计 法验证仿真 结果 。结果表 明线性滤波法与谐波叠加法均能在谱一致准则 使 下生成不 同路 面与车速 下的 时域路 面不平度 , 为人与轮椅 系统分析研 究提供 了数据 支持 【 关键词 】 轮椅 ; 时域路 面不平度 ; 线性滤 波法 ; 谐波 叠加法
科技信息
0高校讲l O k
S IN E&T C N L G F R TO CE C E H O O YI O MA IN N
21年 02
第7 期
基于 S un 的路面不平度时域模型仿真研究 i lk m i
陈 龙 何 草丰 ( 重庆 邮 电大学 自动化 学 院 中国 重庆 4 06 ) 0 0 5
【 bt c]h a uhe oe ic c lo he hiv r i a s. o t xrso e o o e se r dc sfa0 A s atTer dr gns m dls r i el a i ao a l i Frh epesnot a pw rDc u a a ictn r o o s u atw c r b tn n y s e i f r s a c o l r v d a e s p o tt h e s n a d wh ec a rs se ay i t d e e e lt a h e e h c u d p o i e d t u p r o t e p r o n e l h i y t msa l s ssu i s r n
时空相关路面不平度时域模型仿真研究
调整参数。 用谐波叠加法据式(7)求左轮辙路面不平度函数
g。(t),经傅里叶变换后得起频谱为F。(W),利用
振动与冲击
2013年第32卷
式(12)求左右轮频响函数H(1.0),据两车辙路面不平 度频谱响应关系: Fy(|cJ)=日(叫)gx(埘)
(13)
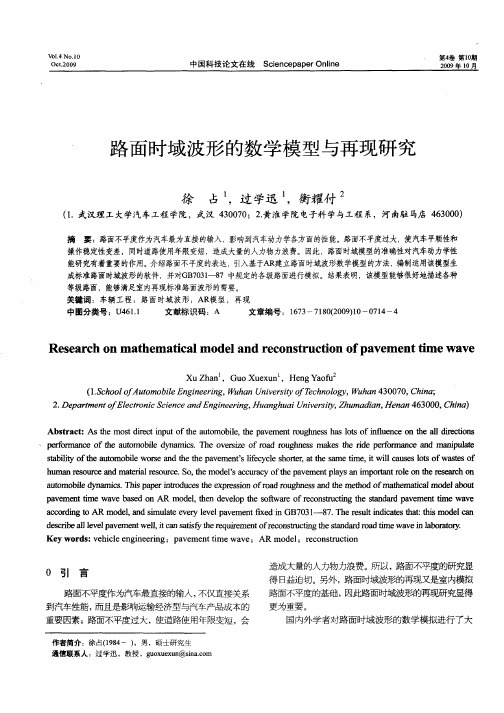
轮、右前轮、左后轮、右后轮的路面不平度时域函数。 经计算机仿真的四轮路面不平度时域模型见图1两种 方法求得车辆四轮路面不平度输入功率谱分别如图2 所示。仿真功率谱由现代功率谱估计所得。由图知仿 真的各车轮路面不平度功率谱和理论功率谱基本吻 合。说明谐波叠加法建立路面不平度模型有效,且通 过两种空间相干和时间相关拓展的四轮模型与基准轮 路面结构相同。
干,不符合真实路面情况。文献[20]用CA一141A货
现代汽车技术逐渐由线性假设转为非线性特性研
究,而对非线性系统,时域分析为最基本的分析方法;
车以50 km/h车速在柏油路面上进行试验,拟合出左 右车辙的相干函数,并被广泛参考使用Ho,21I,颇具参考 价值。文献[22]提到的简单数学模型表示的相干函数 与实际观测曲线较接近。文献[23]提出一种指数衰减 模型,其相干性随着频率的增大呈衰减趋势,与实际道 路情况相似。大多文献对几种相干关系根据近似理论
式中:g,(t),g,(t)分别为前、后轮路面不平度输入; T=∥Ⅱ,后轮滞后时间,s;L为轮距,m;u为车速, m/s。用式(7)求出q,(t),即可据前后轮时延关系求出 g,(t)的路面不平度表达式∞J:
1.3
一参怖 一≤晰
10 |fs 15 20 0 5 10 tis 15 2
同轮辙路面不平度时间相关方法
图l
四轮路面不平度时域模型
车辆单轮辙路面激励为同轮辙的时延激励。假设 车辆前后轮距相同,等速直线行驶,后轮输入滞后前轮 输入一段时间r,即:
路面不平度数学模型

路面不平度数学模型目录编辑本段1. 功率谱分析模型由于信号处理领域中功率谱理论的研究已经非常成熟,因此在道路不平度模型中,功率谱分析模型也就是最早进行研究的了。
对于不同等级的路面,主要区别表现在粗糙度的不同。
通常我们采用谱密度函数来表达不同粗糙度的路面,以给出车辆系统的输入激励。
对于路面不平度的研究,各国学者提出了不同形式的功率谱密度表达式模型。
1.1 三角级数法理论上讲,任意一条路面轨迹均可由一系列离散的正弦波叠加而成。
假如已知路面频域模型,那么每个正弦波的振幅可由相应频率的频率谱密度获得,相位差由随机数发生器产生。
从理论上讲,任意一条路面轨迹均可由一系列离散的正弦波叠加而成。
假如已知路面频域模型,那么每个正弦波的振幅可由相应频率的频率谱密度获得,相位差由随机数发生器产生。
三角级数法尤其适用于实测道路谱的时域模拟,该算法数学基础严密,使用路面范围广。
这对于在非标道路和非等级公路上行驶汽车的平顺性研究具有重要意义,但此模型涉及大量三角函数运算,计算很费时。
一般采用FFT 算法提高其计算效率。
1.2 过滤泊松模型该模型在频率大于一定值后。
能较好地逼近目标谱密度,在频率为零附近效果较差。
它的最大缺点是参数的求取缺乏严密的算法,需要试凑,因此很不方便。
1.3 线性滤波白噪声法基于线性滤波的白噪声激励模拟是目前较普遍的方法。
基本思想是将路面高程的随机波动抽象为满足一定条件的白噪声,然后经一假设系统进行适当变换而拟合出路面随机不平度的时域模型。
线性滤波法具有计算量小、速度快的优点,但算法繁琐、模拟精度差。
1.4 域功率谱采样的数值模拟方法利用对已知功率谱进行采样的数值模拟方法对公路路面的功率谱密度进行研究。
获得了分布在一定频率范围内的离散功率谱密度数据。
通计算、分析获得路面不平度的离散傅立叶变换,对离散傅立叶变换的数据按照一定规则补齐后再进行傅立叶逆变换,进而得到路面不平度值。
编辑本段2. 时间序列分析模型时间序列分析是统计学科的一个重要分支内容。
路面不平度数学模型的研究进展

杨益 明 刘奕贯 ( 南京交通职业技术学院, 南京 2 18) 118
【 摘要】 分别阐 述了 路面不平度的功率谱分析模型、 时间序列分析模型、 分形分析模型及小波分析模
型, 对每一种路面模型进行 了系统评价 , 并指 出了路面不平度研究发展方向。
的分析 方法 , 时域 分 析 方 法 有 利 于 导 出 良好 的 用
控制律 。
1 1 三角级 数法 .
从 理论上 讲 , 意 一 条路 面轨 迹 均 可 由一 系 任 列 离散 的正 弦波叠 加 而成 。假 如 已知 路 面频 域模 型 , 么每个 正 弦 波 的振 幅 可 由相 应 频 率 的频 率 那
进行傅 立 叶 逆 变 换 , 而 得 到 路 面 不平 度值 。其 进 路 面模 型 为 :
N
—
—
q = I t
,
( =0 1 m , …N 一1 )
() 4
式 中 ,为前 、 轮激 励输 人 点位 置 ;为 左 、 i 后 . 右 轮 激励输 入点位 置 ; 随机 路 面 激励 ;t 与路 q O为 面等 级 有 关 的 常 数 ; V为 车 速 ; 为 零 均 值 的
【 主题词】 振动系统
路面不平度
汽车
线性 或耦合 动力学 分 析 , 时 , 此 时域 分析 是 最基 本
0 引言
路 面不平 度 是 车 辆振 动 系 统 的 主要 振 源 , 它 使车辆 在行驶 中产 生 行驶 阻力 和振 动 。汽 车 的平
顺性是 车体 对 路 面 激 励 的综 合 反 映 , 平 路 面 的 不
1 2 线性 滤 波 白噪声 法 .
般性 路面 的激励 为 随机过程 , 把路 面纵 剖 面
整车路面不平度激励的仿真方法研究

整车路面不平度激励的仿真方法研究徐东镇;张祖芳;夏公川【摘要】Analysis of road surface roughness on the three axle vehicle random excitation input, using white noise method and the transfer function method is used to derive the vehicle six rounds of road roughness input state equations are obtained. In Matlab/Simulink to build a two-dimensional pavement roughness mathematical model, and standard pavement roughness the comparison and validation, indicating the accuracy of the model to build. Through the vehicle state equation to build six rounds of pavement roughness mathematical model. The simulation results show that the with the axle of the power density of the two wheels of the spectrum differences, on the same side of the front and rear wheels of power density spectrum difference of smaller, more in line with the actual situation of multi vehicle bridge heavy truck and in order to further validate the simulation results, the correlation coefficient of the road roughness of the six round of the vehicle is analyzed, and the results are consistent with the above conclusions.%分析了路面不平度对三轴式整车的随机激励输入,利用白噪声法和传递函数法推导得出整车六轮路面不平度输入的状态方程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
路面级别 A B C D E ∀ /m- 1 0 132 0 0 130 3 0 120 0 0 100 7 0 090 0 # / mm 1 5 3 2 6 0 11 5 22 0
张斌
100081 )
( 北京理工大学 机械与车辆学院 , 北京
要 : 研究了基于有理函数的路面不平度时域模型 . 采用 M atl ab/ S imulink 软件建立了基 于有理函 数的路面不
平度时域模型 , 并进行了仿真 . 求 取了仿真输出的路面不平度时 域数据的功 率谱和均 方根值 . 对 比国际标 准化组 织提出的路面分级标准 , 确定了正确的模型参数 , 验证了基于有理函数的路面不平度时域模型 . 并导出仅需路面不 平度系数表达的路面不 平度时域模型 . 此模型可方便、 准确地对路面分级标准规定的路面进行仿真 . 关键词 : 路面不平度 ; 时域模型 ; 白噪声 ; 路面分级标准 中图分类号 : U 461 4 文献标识码 : A 文章编号 : 1001 0645 ( 2009 ) 09 0795 04
数 和 有 理 函 数两 种 , 在 模 型 的 本 构 上 两 者是 一 致的[ 6 ] . 功率谱密度的幂函数表达式为 G( n) = G( n0 ) ( n/ n0 ) . ( 1) 式中 : n 为 空 间频 率 ; n0 为 参 考 空间 频 率 , n0 = 0 1m
- 1 -W
; G( n0 ) 为 路面不 平度系 数; W 为 频率指
B C D E
模型中限带白噪声模块需设定采样时间和噪声 功率, 设置采样时间为 10 ms 、 噪声功率为白噪声的协 方差与采样时间的乘积, 选择参数 ∀ , #进行仿真, 即 可得到路面不平度位移的时域输出, 如图 2 所示.
对比发 现两者 之间存 在较 大的 不同 , 即文 献 [ 11] 存在谬误 , 需重新确定 ∀ ,# . 考虑在仿真分 析模型中, 假定参数 ∀与车速 v
使用上述参数进行仿真, 即可得到这 5 种标准 路面的路面 不平度时域 信号. 为验 证仿真输 出结 果, 对得到的路面不平度数据求取均方根值和功率 谱密度, 再与路面不平度 8 级分类标准中的规定进
q 的对比情况 行对比. 其中 , 路面不平度均方根值 ∋ 如表 2 所示.
表 2 仿真得到的路面不平度均方根值与路面分级标准对比 Tab. 2 Comparison of RMS between the regulation from the classification of road roughness and the simulation
第9 期
- 1
吴志 成等 : 基于有理函数的路面不平度时域模型研究
797
的乘积为 1 s , 输出信号的功率谱密度应由限带白 噪声的噪声功率决定 , 噪声功率与参数 #的平方成 正比, 故确定模型参数可从调整噪声功率入手 . 首先, 调整噪声功率使路面输出的功率谱密度 与路面不平度 8 级分类标准中的规定相匹配; 然后 , 调整参数 ∀ , 使仿真输出的均方根值与路面不平度 8 级分类标准中的规定相匹配 . 按照这种方法可依次 得到与 8 种标准路面对应的模型参数. 设置 限 带 白 噪 声 模 块 的 噪 声 功率 为 6 3 ! 10- 5 m 2 、 模 型 参 数 ∀ 为 0 111 m - 1 、 仿 真 时间 为 1 000 s, 设定车速 v 分别为 10, 20 m / s 进行仿真 , 得 到的功率谱密度与 A 级路面相匹配, 如图 3 所示 .
2
基于有理函数的路面不平度模拟
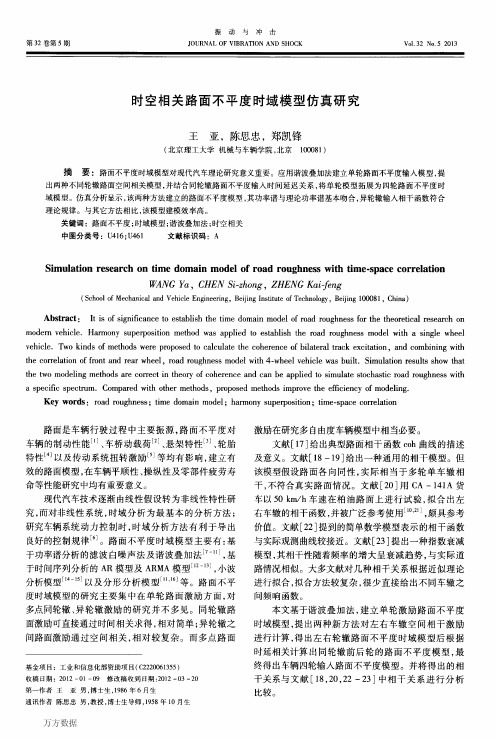
基于式 ( 4 ) 的路面不平度时域数学模型为 q( t ) + ∀ vq ( t) = w E ( t ) . ( 5)
式中: q( t ) 为路面不平度位移输入 ; v 为车速; w E ( t ) 为白噪声, 其协方差满足 2 E w E( t) w E( t + % ) = 2# ∀ v &( % ). 式中: % 为时移; & ( %) 为脉冲函数 . 利用 M at l ab/ Si muli nk 仿真分析工具箱建立路 面不平度的时域仿真分析模型 , 如图 1 所示. ( 6)
为 行 程 圆 频 率; d, .
为 与路 面有 关的
功率谱密度的有理函数表达式之三为 2 ∀ # !z0 ( ) = . 2 ∃( ∀ + 2 ) 式中 ∀, #为与路面等级有关的常数 [ 10 ] .
( 4)
不难看出, 适当选择式 ( 2 ) ~ ( 4 ) 中与路面有关 的常数 , 可以使其具有完全相同的形式.
Fig. 4
图 4 根据式 ( 10) 建立的 Sim ulink 仿真分析模型 Simul ink model f or s imulat ion f ound based on equat ion ( 10)
设置限带白噪声模块的采样时间为 10 m s, 噪 声功率设置为 0 01 m 2 , 以保证白 噪声的协方差为 1 m / s. 依次选定 G q ( n0 ) 为路面不平度 8 级分类标 准中规定的各级路面不平度系数几何平均值, 调整 并确定待定系数 ( , 使 G q 及其均方根 ∋q 与路面不平
第 29 卷 第 9 期 2009 年 9 月
北 京 理 工 大 学 学 报 T ransact ions of Beijing Inst itut e o f T echno lo gy
V ol. 29 N o . 9 Sep. 2009
基于有理函数的路面不平度时域模型研究
吴志成,
摘
陈思忠,
杨林,
收稿日期 : 2008 10 16 基金项目 : 国家部委预研项目 ( 1030020220701 ) 作者简介 : 吴志成 ( 1972 ) 男 , 在职博士生 , 讲师 , E mail: w u_zhi cheng@ bit . edu. cn.
796
北 京 理 工 大 学 学 报
第 29 卷
路面级别 A ∋q / mm 路面分级标准 3 81 7 61 15 23 30 45 60 90 仿真结果 0 151 0 323 0 605 1 162 2 224
F ig . 1
图 1 路面不平度时域仿真 S i mul ink 模型 S i muli nk model of road roug hness f or simul at ion i n ti me d omai n
写为 q( t ) = - ∀ vq ( t) + ( G q ( n0 ) v w 0 ( t ) . ( 8 ) 式中 : (为待定系数; G q ( n0 ) 为路面不平度 8 级分类 标准中规定的路面不平度系数几何平均值; w 0 ( t ) 为 协方差为 1 m 2 / s 的单位白噪声 . 根据式( 8) 建立用 Simulink 所做路面不平度时 域仿真分析模型, 如图 4 所示 .
和基于幂函数的 FFT 逆变换生成
等. 借助 Matl ab/ S imul ink 中的限带白噪声模块 ,
1
路面不平度的功率谱表达式
一般路面不平度激励为随机过程, 统计学上常
可方便地使用基于有理函数滤波白噪声生成法建立 起路面不平度的时域模型 , 其模型参数与路面等级
用功率谱密度描述 , 功率谱密度的表达形式有幂函
[ 7]
数 , 分级路面谱的频率指数 W = 2 . 功率谱密度的有理函数表达式之一为 Psd ( ) = 式中: 为波数 ; 系数
[ 8] 0 0 2
Rc +
2
.
( 2)
F i g. 2
为截止波数 ; Rc 为与路面有关的
图 2 路面不平度时域仿真输出 D i sp lac ement out p ut of t ime d omai n si mul ati on f or road r oug hness
Abstract: T ime domain model of road roughness based o n r at ional funct ions is st udied. U sing t he M at lab/ Simulink pr ogram package, a t ime do main mo del of road ro ug hness based o n rat ional f unctio n is f ound and simulat ed. T he pow er spect ral densit y and roo t mean square o f t he simulat ion out put s are co mput ed. Refer t o t he classif icatio n of ro ad r oughness by ISO, t he correct paramet er s ar e obtained, and t he validit y of t he t ime dom ain model of road ro ug hness based on rat ional funct ion is validat ed. A new t ime do main mo del of road roughness w hich just r equires t he road roughness co ef ficient is deduced. U sing this model, t he road ro ug hness m ent ioned by the classif icat io n of ro ad ro ug hness can be simulat ed cor rect ly and easily. Key words: road roughness; t ime domain; w hit e noise; classif ication of road roughness 在汽车悬架系统研究中 , 行驶道路的路面不平 度是必不可少的一项输入条件 . 非线性系统和控制 系统的引入 , 使研究需在时域中进行 , 所需的路面不 平度激励也应是时域信号 . 时域路面激励信号的获 得方法主要有两种, 即通过实验测量和使用时域模 型 仿真 . 路 面 不平 度 时 域仿 真 主 要有 谐 波 叠加 法[ 1 ] 、 基于有理函数的滤波白噪声生 成法[ 2 ] 、 AR / A RM A 模型法 法