拖拉机自动驾驶监控系统软件设计
智慧农业监控系统制作教程设计方案
智慧农业监控系统制作教程设计方案智慧农业监控系统是一种利用物联网、云计算、大数据等信息技术手段,实现对农田环境、作物生长、农业设施等实时监控和管理的系统。
一、系统架构设计智慧农业监控系统的设计可以分为三个层次:传感器层、网络层、应用层。
1. 传感器层传感器层是监测农田环境、作物生长等信息的基础,包括温度传感器、湿度传感器、光照传感器、土壤湿度传感器等。
传感器通过实时采集环境参数,并将数据发送到网络层。
2. 网络层网络层是数据传输和处理的核心,通过物联网技术将传感器采集的数据传输到云服务器。
网络层可以采用无线传输技术,如WiFi、LoRa等,实现远程监控和管理。
3. 应用层应用层是智慧农业监控系统的用户界面,通过Web或移动应用提供农田环境、作物生长等实时监控和管理功能。
用户可以通过应用层查看农田各项指标的数据,并进行农作物种植、施肥、灌溉等农业管理操作。
二、系统实现步骤1. 选择传感器根据农田环境和农作物的需要,选择合适的传感器,如温度传感器、湿度传感器、光照传感器、土壤湿度传感器等。
注意传感器的精度和稳定性。
2. 搭建传感器网络将传感器连接到微控制器,通过无线通信模块将传感器数据发送到云服务器。
可以选择现有的无线通信技术,如WiFi、LoRa等。
3. 搭建云服务器搭建云服务器,用于接收和处理传感器数据。
可以选择云计算服务提供商,如AWS、阿里云等。
在云服务器上编写数据处理和存储的程序。
4. 开发应用层开发Web或移动应用,实现农田环境、作物生长等实时监控和管理功能。
通过调用云服务器接口,获取传感器数据,并进行展示和操作。
5. 系统整体测试和优化完成系统搭建后,进行整体测试,验证系统是否正常运行,并进行优化。
可以根据测试结果,对系统各个模块进行优化和改进。
三、安全性和可靠性考虑1. 数据安全保护传感器数据的安全,防止数据泄露和篡改。
可以采用加密技术对传感器数据进行加密传输,并在云服务器上设置安全认证机制。
农机自动驾驶设备作业检测系统的设计与实现
农机自动驾驶设备作业检测系统的设计与实现作者:杨宏伟苏仁忠解晓琴来源:《河北工业科技》2021年第04期摘要:为了满足精准农业领域对农机自动驾驶系统作业进行性能评估和质量管控的需求,解决常规人工测量中误差大、不确定度高的难题,设计一种在真实作业环境中使用的高精度检测系统,使用组合导航系统为核心组件搭建硬件采集设备,运用动态后处理技术(PPK)对观测数据进行深耦合处理,并开发基于JavaScript的自动化评估软件,实现检测过程中的人机交互、数据提取、地图直观显示和结果统计。
选择不同型号的样机在硬化场地和农田熟地进行试验,结果表明:系统采集的作业数据连续、稳定,耦合处理的精度较高,能够直观准确地评估农机自动驾驶设备的作业性能。
系统可应用于北斗农机辅助自动驾驶设备的作业评价和质量鉴定,有助于推动国家农机购置补贴和质量认证政策的落地。
关键词:卫星导航;精准农业;自动驾驶;作业性能;检测系统;PPK中图分类号:TN966文献标识码:ADOI: 10.7535/hbgykj.2021yx04004Design and implementation of operation performance detection systemfor agricultural machinery automatic driving equipmentYANG Hongwei1,SU Renzhong2,XIE Xiaoqin 1(1.The 54th Research Institute of CETC, Shijiazhuang,Hebei 050081, China;2.Hubei Agricultural Mechanization Technology Extension Station, Wuhan, Hubei 430017, China)Abstract:In order to satisfy the requirements of the operating-performance evaluation and the quality control for automatic driving of agricultural machinery in precision agriculture, and to solvethe problems of high error and uncertainty in the usual manual measurements,a high precision detection system used in real working environment was designed and the integrated navigation system was used as the core component to set up the hardware acquisition instrument.The dynamic post processing kinetic (PPK) method was applied to process the observed deeply-coupled data and the automated assessment software was developed based on JavaScript to realize human-computer interaction, data extraction, map visualization and result statistics in the detection process. Finally, different types of prototypes were tested in hardening sites and farmland.The results show that the operating data acquired by the system is continuous and stable. Furthermore, the coupling-processing method has a high precision, which can directly and accurately evaluate the operating performance of the agricultural machinery automatic driving equipment.The system can be applied to the operation evaluation and quality appraisal of Beidou agricultural machinery satellite navigation auxiliary automatic driving systems, which can help to realize the policies of national agricultural machinery purchase subsidies and quality certification.Keywords:satellite navigation; precision agriculture; autonomous driving; operating performance; detection system; PPK中國是农业大国,传统的农业机械受限于人工操作,劳动强度大,作业质量完全依赖于驾驶人员的技能,野外夜间作业基本无法实现。
智慧农机生产系统设计设计方案 (2)
智慧农机生产系统设计设计方案智慧农机生产系统设计方案一、引言随着科技的不断发展和智能化的快速进步,农业也需要适应时代的发展趋势,推动农机生产向智慧化、自动化方向发展。
智慧农机生产系统是应运而生的一种方案,旨在提高农机生产的效率、降低生产成本,提供更好的农产品质量,为现代农业发展做出贡献。
二、系统概述智慧农机生产系统由硬件设备、软件系统和远程监控系统组成。
硬件设备包括农机和传感器等,软件系统实现对农机的智能控制和管理,远程监控系统可以实现对农机的实时监控和远程操作。
三、系统功能1. 智能控制功能:通过软件系统对农机进行智能控制,包括自动驾驶、自动操纵、作业路径规划等功能。
2. 监测功能:通过传感器监测农田环境、土壤水分、温度等参数,实时获取农田信息,为农机作业提供依据。
3. 作业管理功能:通过软件系统对农机的作业进行管理,包括作业计划、作业记录、作业数据分析等功能。
4. 故障诊断功能:通过传感器对农机进行实时监测,及时发现故障并进行诊断,提供故障处理建议。
5. 远程监控功能:通过远程监控系统实现对农机的实时监控和远程操作,可以随时了解农机的工作状态和位置。
四、系统设计1. 硬件设备设计:采用现代化的农机设备,配备各种传感器,如GPS定位传感器、温湿度传感器、土壤水分传感器等。
2. 软件系统设计:设计一个集中管理的软件系统,包括作业控制、作业计划、作业记录和作业数据分析等功能。
3. 远程监控系统设计:设计一个可以实时监控农机工作状态和位置的远程监控系统,可以通过手机或电脑随时监控农机。
4. 数据分析和决策支持系统设计:通过数据分析和决策支持系统,对农机作业数据进行分析,提供决策支持和优化建议。
五、系统优势1. 提高生产效率:智慧农机生产系统可以实现农机的自动化作业和智能控制,提高农机作业效率,减少人力成本。
2. 降低生产成本:智慧农机生产系统可以根据实际农田环境和需求进行智能作业计划,减少农药和化肥的使用,降低生产成本。
拖拉机遥操作驾驶虚拟现实系统的设计

结合 O p e n G L图形程 序接 口及 3 d s Ma x , 构 建 以南京农 业 大学浦 口校 区为 工作ቤተ መጻሕፍቲ ባይዱ场 景的拖拉 机 遥操 作 虚拟
现 实软 件 系统 。 实验表 明 , 拖 拉机 遥操 作驾 驶虚 拟现 实 系统 简单 稳 定 , 易于操 纵 , 具有 良好 的 交互性 和
Ab s t r a c t : I n o r de r t o o v e r c o me t h e d i ic f u l t y 0 ±f u l l y a u t o no mo u s d r i v i n g o f i n t e l l i g e n t t r a c t o r u n d e r le f x i b l e a n d v a ia r b l e wo r ki ng c o n d i t i o ns ,a t e l e — o p e r a t i o n t r a c t o r d r i v i n g s y s t e m b a s e d o n v i r t u a l r e li a t y t e c h n o l o g y i s d e - s i g n e d. Fi r s t l y , t h e c o n t r o l l i n g t e r mi na l ha r d wa r e s y s t e m i s d e v e l o p e d, wh i c h i s c o mp o s e d o f t r a c t o r d iv r i n g s i m— u l a t o r , t h e s i g n a l a c q u i s i t i o n a n d d e t e c t i o n c i r c u i t f o r e a c h me c ha n i s m a n d d a t a c a p t u r e s y s t e m. Th e n, b a s e d o n VC ++ p l a t f o r m,c o mb i n e d wi t h Op e n GL g r a p h i c s p r o g r a mmi ng i n t e r f a c e a n d 3 ds Ma x s o f t wa r e , t h e t r a c t o r t e l -
基于 WinCE 的农机导航监控终端软件系统设计与实验

基于 WinCE 的农机导航监控终端软件系统设计与实验张亚娇;张智刚;罗锡文;单鹏辉【期刊名称】《农机化研究》【年(卷),期】2016(0)1【摘要】Intelligent navigation monitoring terminal is an important component of automatic navigation technology system for agricultural machinery.In order to meet the needs of agricultural informationization development,and real-time moni-tor and control the agricultural machinery operation, the navigation monitoring software for agricultural vehicle is devel-oped.The navigation state of the agricultural vehicle can be monitored, controlled, and the fault can be diagnosed with the intelligent monitoring terminal.According to the feature of field work, the automatic navigation monitoring terminal software is designed based on WinCE with embedded touching screen technology.The navigation monitoring terminal soft-ware included the following modules : man-machine interaction interface, serial port communication module with RS232, measure control module, path planning module, file read and write module.Besides, data communication proto-col between navigation monitoring terminal and navigation controller is formulated.The actual test result showed that nav-igation monitoring terminal software system could realize the operation and monitoring of the navigation system for agricul-tural vehicle.%随着农业机械自动导航技术的发展,农机导航监控终端技术已经成为农业机械自动导航技术的重要组成部分。
基于智能控制技术的拖拉机自动化驾驶系统设计与实现

基于智能控制技术的拖拉机自动化驾驶系统设计与实现1.摘要农业生产自动化已经成为现代农业的重要发展趋势,拖拉机自动化驾驶系统作为农业生产自动化的核心技术之一,受到越来越多的关注和研究。
本文提出了一种基于智能控制技术的拖拉机自动化驾驶系统设计与实现方案,该方案包括了拖拉机自动导航、自动行驶、自动拖拉等功能,能够有效地提高农业生产效率和农业生产质量。
本文首先介绍了拖拉机自动化驾驶系统的研究背景和意义,然后详细阐述了该系统的设计思路和实现步骤。
该系统采用了传感器、控制器、导航设备等多种硬件设备,以及智能控制算法和机器学习技术等多种软件技术,通过将这些技术进行有机结合,实现了拖拉机自动导航、自动行驶、自动拖拉等多种功能。
在系统实现过程中,本文重点介绍了拖拉机自动导航算法的设计和实现,该算法基于GPS和惯性导航技术,能够高精度地实现拖拉机的自动导航。
此外,本文还介绍了拖拉机自动行驶算法的设计和实现,该算法通过利用机器学习技术,能够智能地控制拖拉机的速度和方向,实现拖拉机的自动行驶。
实验结果表明,本文所提出的基于智能控制技术的拖拉机自动化驾驶系统具有较高的可靠性和稳定性,能够有效地提高农业生产效率和农业生产质量,具有广阔的应用前景和发展空间。
关键词:智能控制技术;拖拉机自动化驾驶系统;自动导航;自动行驶;自动拖拉2.引言农业是国民经济的基础产业之一,而农业生产自动化已成为现代农业的重要发展趋势。
在农业生产中,拖拉机作为重要的农业机械之一,对于提高农业生产效率和农业生产质量具有重要作用。
然而,传统的拖拉机驾驶方式需要农民花费大量时间和精力进行操作,存在人工操作疲劳、生产效率低下等问题,因此,拖拉机自动化驾驶技术的研究和应用具有重要意义。
近年来,随着智能控制技术的不断发展,拖拉机自动化驾驶技术得到了快速发展。
拖拉机自动化驾驶系统可以利用传感器、控制器、导航设备等多种硬件设备,以及智能控制算法和机器学习技术等多种软件技术,实现拖拉机自动导航、自动行驶、自动拖拉等多种功能,大大提高了农业生产效率和农业生产质量。
基于Raspberry Pi的拖拉机通用自动驾驶系统
杨
柳 ,罗婷婷,程新荣 ,李建平 ,宋雨瑶.基于 R a s p b e r r y P i 的拖拉机通 用自动驾驶 系统 [ J ] .农业工程学报 ,2 0 1 5 ,
d o i :1 0 . 1 1 9 7 5 J . i s s n . 1 0 0 2 — 6 8 1 9 . 2 0 1 5 . 2 1 . 0 1 4 h t t p : / / ww w. t c s a e . o r g
d o i :1 0 . 1 1 9 7 5  ̄ . i s s n . 1 0 0 2 — 6 8 1 9 . 2 0 1 5 . 2 1 . 0 1 4 中图分类 号:T P 2 3 ; ¥ 2 4 文献标志码:A
文章编号 :1 0 0 2 — 6 8 1 9 ( 2 0 1 5 ) 一 2 1 ~ 0 1 0 9 — 0 7
第3 1 卷 第 2 1 期
201 5钲
农 业 工 程 学 报
T r a n s a c t i o n s o f t h e Ch i n e s e S o c i e t y o f Ag r i c u l t u r a l E n g i n e e r i n g
用分 布式控制方式的拖拉机 自动化驾驶系统 。 该系统 的作用在于 同 S AF AR系统( s o f t wa r e a r c h i t e c t u r e f o r a g r i c u l t u r a l r o b o t , 农业机器 人的软件 体系结构 )整合 ,成 为一个 能够进行 实际工 作的系统。系统采用 R a s p b e r r y P i 微型计算机作 为系统的电 子控制 单元 ( e l e c t r o n i c c o n t r o l u n i t ,E C U) ,在 不 同 的 E C U 上 分 别 处 理 不 同 的任 务 ,利 用 通 讯 协 议 传 输 控 制 协 议/ 互联 网 络协 议来 进行 E C U之 间的通讯 。 为了保 障系统 的安全 , 该 系统采用激光测距 传感 器 R 2 1 0 0来保障车辆和周 围环境 的安全 , 采用 He a r t Be a t( 心跳 )检测机制来探测系统故障 。该系统可 以接收来 自 S AF AR的控制信号,并对拖 拉机进行 相应 的 操作 来实现拖拉机 的 自动化 驾驶 。除此之外 ,该系统还提供 了无 线遥 控的功能 ,能够方便操作人员进行简单 、直观 的操 控 。经过测试 ,该系统能够正确 、快速地响应来 自操作人员或 S A F AR 的控制 ,控制 系统 的响应 时间低 于 0 . 5 S ,电机转 向角误差 小于 0 . O 6 ;舵机角度偏差 4 。 左右 ;系统各个 E C U之 间通讯稳 定可靠 ,可在试验设定的 4 h内稳 定工作,每 0 . 2 5 S 检测 一次工作环境并给予响应 。该研究对农业机械 自动化 的实现提供 了参考 。 关键 词:农业机械 ;拖拉机;控制 系统; 田间; 自动化 ;传感 器
无人驾驶拖拉机田间运行轨迹跟踪控制系统设计
无人驾驶拖拉机田间运行轨迹跟踪控制系统设计目录1. 内容概述 (2)1.1 研究背景 (3)1.2 研究目的和意义 (3)1.3 文献综述 (5)1.4 创新点与研究思路 (6)2. 拖拉机田间运行轨迹跟踪控制系统整体架构设计 (7)2.1 系统总体结构 (9)2.2 数据采集与处理系统设计 (11)2.2.1 GPS卫星定位模块 (12)2.2.2 传感器模块 (13)2.2.3 数据采集器的构建与设计 (14)2.3 导航控制单元设计 (15)2.3.1 控制系统硬件设计 (17)2.3.2 控制器软件设计 (18)3. 路径规划与轨迹控制算法设计 (20)3.1 路径规划算法设计 (21)3.2 轨迹控制算法设计 (23)4. 该系统关键技术难点与保障措施 (25)4.1 定位精度问题及解决方法 (26)4.2 田间环境对系统性能的影响分析与对策 (28)4.3 设备自动化水平不足及提高方案 (29)5. 仿真实验分析与验证 (31)5.1 仿真实验设计与设置 (32)5.2 运行轨迹模拟结果 (34)6. 测试实验与结果分析 (36)6.1 测试实验设计及预期目标 (37)6.2 田间测试实验与结果 (39)7. 结论与展望 (41)7.1 主要结论 (42)7.2 研究展望 (43)1. 内容概述本设计旨在开发一套用于无人驾驶拖拉机田间运行轨迹跟踪的控制系统,该系统将通过先进的传感器技术、路径规划算法和实时控制策略实现对农地的有效管理和作业自动化。
系统的主要目标是提高农业生产的效率和质量,减少人力成本,同时保证作业的安全性和准确性。
系统设计将考虑无人驾驶拖拉机的运动学模型,结合GPS、激光雷达(LIDAR)、摄像头等多种传感器数据,进行实时轨迹跟踪与修正。
还将会集成环境感知功能,比如土壤湿度、作物生长状况等数据,以辅助作业决策。
路径规划模块:基于GNSS和地图数据,为拖拉机规划最优作业路径。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
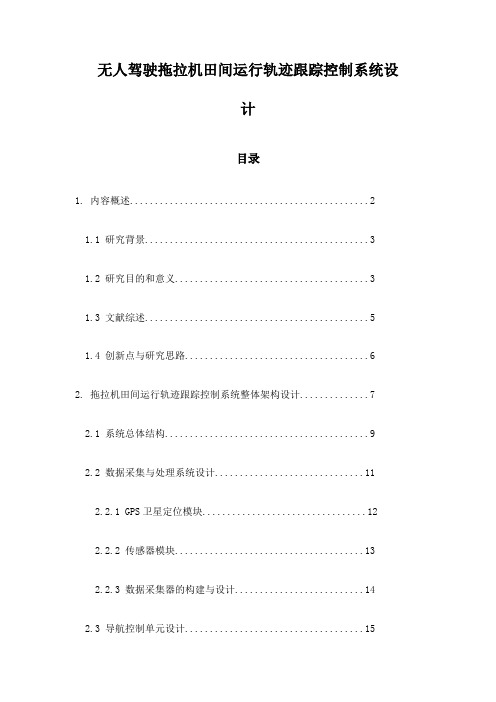
图 2 软件结构与功能框图 Fig. 2 Software structure and function diagram
参数设置包括 GPS 设 置、农 具 设 置、地 块 设 置 3 前进方向、跟踪误差及已完成作业量等信息的实时监 个独立的子窗口,采用自行设计的软键盘 ( 仅支持字 测。 母及数字) 输入。参数设置在系统启动后自动驾驶功 能启动前完成,各窗口具体参数内容如图 3 所示。
拖拉机是农业生 产 机 械 中 最 重 要 的 驱 动 力 ,是 实 施精准农业的根本动力[1]。提高拖拉机大 田 作 业 耕
作精度与效率 、减轻 驾 驶 员 工 作 负 荷 等 需 求 的 提 出 使
得开展拖拉机自动驾驶关键技术研究与应用推广已
具 有 可 行 性 和 必 要 性 ,同 时 也 是 农 业 装 备 机 械 化 、自
·89·
2015 年 7 月
农机化研究
第7 期ቤተ መጻሕፍቲ ባይዱ
2 软件设计
2. 1 开发平台与技术 WinCE 作为一个开放的、可裁剪的、32 位嵌入式
实时窗口操作系 统 ,以 可 靠 性 好 、实 时 性 高 、内 核 体 积 小及微软强大的技术支持等优势广泛应用于各种智 能设备[8]。系 统 终 端 选 用 飞 凌 公 司 生 产 的 OK335xS 型触摸屏工业智能控制终端,支持 WinCE7. 0 操作系 统、RS232 串口通信、CAN2. 0 高速数据传输及 SD 卡
动化发展的必然趋势。 美国、日本、德 国 等 许 多 国 家 都 开 展 了 农 业 车 辆
自动导航系统的 研 究 ,并 已 有 成 熟 产 品 进 入 市 场 。 目 前,国 内 对 于 自 动 驾 驶 作 业 系 统 的 应 用 ,常 见 的 有 美 国天宝、拓普康等[2 - 3]。我国在农机自动驾驶系统研 究方面起步较晚 ,中 国 农 业 大 学 、华 南 农 业 大 学 、上 海 司南 、西安恒昇等科 研 机 构 或 公 司 已 经 取 得 了 一 定 的 成果并进行了一定 范 围 的 推 广 与 应 用 ,但 仍 有 待 进 一 步优化[4 - 7]。为此,基于实验室前期对拖拉机旱地播 种作业自动驾驶关键技术的研究,以 WinCE 嵌入式智 能终端为平台,采用 C + + 语言设计并开发了拖拉机 自动驾驶作业监控系统。
率 ,降 低 劳 动 强 度 具 有 重 要 意 义 。为 此 ,基 于 WinCE 嵌 入 式 智 能 终 端 、多 线 程 技 术 及 CAN 总 线 技 术 ,在 研 究 拖 拉
机 自 动 驾 驶 工 作 原 理 的 基 础 之 上 ,设 计 了 拖 拉 机 自 动 驾 驶 监 控 软 件 系 统 ,采 用 AB 直 线 路 径 规 划 方 法 ,能 实 时 接
图 5 多线程数据处理方案 Fig. 5 Multi thread data processing scheme
3 试验测试
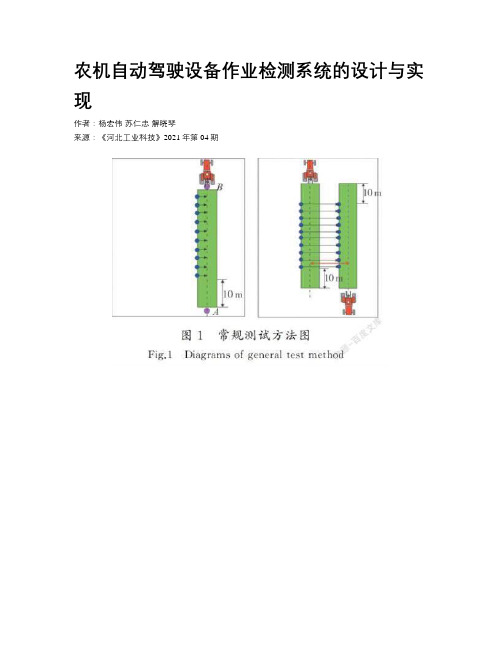
3. 1 测试方法 将自动驾驶系统按照图 6 所示安装在天津拖拉机
厂生产的 TN654 拖拉机上,于 2014 年 4 月在新疆农 八师 122 团试验田内进行播种试验。考虑直线路径规 划方法和测量的方 便 ,为 了 使 测 试 结 果 充 分 反 映 拖 拉 机自动驾驶系统在田间的作业效果及其行走的直线 度 ,试验过程中取当 前 行 与 上 一 行 的 接 行 误 差 作 为 自 动驾驶系统衡量 指 标 。 为 保 证 划 行 器 划 线 的 效 果 ,试 验过程中可在划行 器 的 末 端 加 上 合 适 配 重 ,以 便 测 量 接行误差。测量示意图如图 7 所示。
路径规划与跟踪模块根据已规划垄行及当前拖拉 机 GPS 位置信息,动态实时显示拖拉机的工作位置、 作业路径及垄行跟 踪 偏 差 ,并 及 时 提 示 驾 驶 员 调 整 驾 驶策略以保障拖 拉 机 准 确 巡 航 。 此 外 ,路 径 回 放 功 能 还能够根据数据库已存储导航信息实现线下作业过 程再现与检查。系统通过 AB 直线垄行预规划的方法 决策拖拉机在田间 的 工 作 路 径 并 进 行 跟 踪 显 示 ,当 拖 拉机垄行跟踪偏差 大 于 作 业 要 求 时 ,系 统 需 重 新 规 划
1 拖拉机监控系统结构图 Fig. 1 Framework of tractor monitoring system
拖拉机启动、系 统 各 模 块 上 电 运 行 后,终 端 作 为 主控模块通过 CAN 总线向其它各 CAN 模块发送设备 状态检测命令 。 待系 统 自 检 无 误 后 ,用 户 即 可 通 过 终 端获取拖 拉 机 的 运 行 状 态 并 进 行 相 关 信 息 的 设 置。 终端与 GPS 接收机通过串口进行通信,获取拖拉机的 位姿信息,进行位置信息( 经纬度) 转换、AB 直线导航 路径规划及目标路径决策。当自动驾驶功能启动时, 终端通过 CAN 总线向导航控制器发送目标路径直线 方程及拖拉机当前位姿信息。导航控制器采用纯跟 踪算法决算出拖拉机无限逼近目标路径应该执行的
存储。以该终端为硬件平台,以 VS2008 MFC 智能设 备项目集成开发环境为软件平台,基于 WinCE 所支持 的多线程技术实现高实时性拖拉机自动驾驶精准作 业监控系统。 2. 2 软件结构与功能
拖拉机自动驾驶监控系统软件结构与功能如图 2 所示 。 采用模块化设 计 并 实 现 系 统 各 个 功 能 ,其 主 体 模块 包 括 参 数 设 置、数 据 监 测、路 径 规 划 与 跟 踪 显 示 等。
6) 若 H( j) < H( j - 1) 且 H( j) < H( j + 1) ,继续以 当前直线 F( j) 为导航路径,转至过程 4) ;
7) 当拖拉机垄行跟踪偏差大于作业要求时,重新 规划路径,转至过程 1) 。 2. 3 多线程设计
WinCE 多线程 处 理 技 术 是 系 统 实 现 在 线 大 量 数 据实时采集与处理 的 重 要 保 障 ,基 于 该 技 术 设 计 并 实 现的自动驾驶监控系统数据处理流程如图 5 所示。系 统在线运行时,通过 CAN 接收和发送子线程与下位机 通信,通过串口通信子线程采集 GPS 信息。垄行规划 及跟踪子线程负责 动 态 实 时 决 策 和 路 径 生 成 ,图 形 绘 制子线程 负 责 显 示 拖 拉 机 的 工 作 位 置 及 当 前 路 径。 数据库子 线 程 负 责 保 存 相 应 数 据 信 息,主 线 程 负 责 GPS 平面坐标转换、用户信息交互及相关监测信息显 示。主线程通过线程同步与互斥机制保证各子线程 间协 同、快 速 有 效 地 完 成 相 应 功 能,避 免 线 程 间 发 生 访问冲突。
1 系统架构与原理
转角和转向,并将该信息通过 CAN 总线发送给转角控
拖拉机自动驾驶作业监控系统( 如图 1 所示) 主 要由 GPS 接收机、智能监控终端、农具控制模块、导航
制器。转角控制器根据目标转角控制步进电机的转 动进而驱动方向盘 ,通 过 控 制 电 磁 阀 通 断 电 实 现 自 动 驾驶和人工驾驶切换。转角传感器通过转角控制器
图 3 参数设置界面 Fig. 3 Parameters setting interface
数据监测模块位 于 系 统 主 界 面 左 侧 ,其 设 计 界 面 如图 4 所示。数据监测模块实现 GPS 经纬度、车速、
图 4 软件主界面 Fig. 4 Main interface of software
2015 年 7 月
农机化研究
第7 期
拖拉机自动驾驶监控系统软件设计
薛 龙,马 蓉
( 石河子大学 机械电气工程学院,新疆 石河子 832000)
摘 要: 随 着 农 业 装 备 机 械 化 、自 动 化 水 平 的 提 高 ,推 广 和 应 用 拖 拉 机 自 动 驾 驶 技 术 ,对 提 高 大 田 耕 作 精 度 与 效
此次试验播种作业行驶速度 3. 5km / h 左右,共计 11 行,每行长度约 150m,每个接行数据测量点不低于 50 个,剔除每个接行测量点粗大数据后取其绝对平均 值,试验数据如表 1 所示。田间测 试 结 果 表 明: 该 自
·91·
2015 年 7 月
农机化研究
第7 期
动驾驶监控系统在 TN654 拖拉机上运行稳定、可靠、 数据交互实时性高; 接行相对测量误差的绝对平均值 为 9. 7cm,最大相对测量误差不超过 12cm,基本满足 播种要求。
关键词: 拖拉机; 自动驾驶; 监控终端; W i n C E ; 软件设计
中图分类号: S126; S219
文献标识码: A
文章编号: 1003 - 188X( 2015) 07 - 0089 - 04
DOI:10.13427/ki.njyi.2015.07.020
0 引言
控制器、转角控制器、执行机构( 步进电机) 、电磁换向 阀和前轮转角传感器组成。
图 6 自动驾驶系统安装示意图 Fig. 6 Installation sketch of automatic driving system
图 7 试验测量示意图 Fig. 7 Sketch of test measurement
3. 2 测试结果 拖拉机自动驾驶监控系统参数设置完成后系统启
动,沿行驶方向分别获取 A、B 点位置( A、B 两点距离 尽量在 50m 以上) ,形成直线 AB; 以此直线按作业幅 宽规划出该地块的 导 航 直 线 系 ,之 后 拖 拉 机 按 此 路 径 进行田间自动驾驶播种作业。监控终端运行界面如 图 8 所示。
拖拉机自动驾 驶 监 控 系 统 采 用 模 块 化 设 计 ,基 于 嵌入式 WinCE 多线程处理机制和 CAN 总线技术实现 了大量信息的实时监测与处理。田间试验测试结果 表明: 该监控系统通信可靠、运行稳定; 路径规划算法 设计合理,系统作业精度基本满足需求。
收 、显 示 和 保 存 导 航 信 息 和 控 制 拖 拉 机 运 行 状 态 。 试 验 测 试 结 果 表 明 : 该 系 统 运 行 稳 定 、通 信 可 靠 、系 统 实 时 性