微波炉控制器设计[1]
VHDL微波炉控制器设计

目录一、绪论 (2)二、关键技术简介 (2)2.1 FPGA简介 (2)2.2 VHDL语言概述 (2)2.3 ALTIUM DESIGNER简介 (3)三、微波炉定时控制器的设计方案分析 (4)3.1 系统设计的要求 (4)3.2 系统总体功能描述 (4)3.3 各模块的功能实现 (5)3.3.1 输入模块 (5)3.3.2 状态控制模块 (5)3.3.3 显示模块 (5)四、系统详细设计 (7)4.1控制模块 (7)4.1.1状态转换控制 (7)4.1.2数据装载 (9)4.1.3 烹饪计时 (10)4.1.4 控制模块的实现 (11)五、系统仿真 (11)5.1状态控制器仿真 (11)5.2 数据装载器的仿真 (12)5.3 烹饪计时器的仿真 (13)六、结论 (14)一、绪论随着人民生活水平的提高,微波炉开始进人越来越多的家庭,它给人们的生活带来了极大的方便。
微波炉由 2450MHz 的超高频来加热食物。
它省时、省电、方便和卫生。
作为现代的烹饪工具,微波炉的控制器体现着它的重要性能指标。
目前大部分微波炉控制器采用单片机进行设计,电路比较复杂,性能不够灵活。
本文采用先进的EDA技术,利用ALTIUM DESIGNER工作平台和VHDL设计语言,设计了一种新型的微波炉控制器系统。
该系统具有系统复位、时间设定、烹饪计时等功能,在 FPGA 上实现。
二、关键技术简介2.1 FPGA简介FPGA(Field-Programmable GateArray),即现场可编程门阵列,它是在PAL、 GAL、CPLD 等可编程器件的基础上进一步发展的产物。
它是作为专用集成电路(ASIC)领域中的一种半定制电路而出现的,既解决了定制电路的不足,又克服了原有可编程器件门电路数有限的缺点。
目前以硬件描述语言(Verilog 或 VHDL)所完成的电路设计,可以经过简单的综合与布局,快速的烧录至 FPGA 上进行测试,是现代 IC 设计验证的技术主流。
微波炉控制器
微波炉控制器微波炉是一种微波加热食品的现代化烹调灶具,它由电源、磁控管、控制电路和烹调腔组成。
其中,微波炉控制器部分完成各工作状态之间的切换功能,可以通过硬件语言描述的数字系统来实现。
详细分析微波炉控制器的原理和组成结构,并设计一个简单的具有定时和信息显示功能的微波炉控制器。
一、系统设计要求设计一个具备定时和信息显示功能的微波炉控制器。
要求该微波炉控制器能够在任意时刻取消当前工作,复位为初始状态。
可以根据需要设置烹调时间的长短,系统最长的烹调时间为59分59秒;开始烹调后,能够显示剩余时间的多少。
显示微波炉控制器的烹调状态。
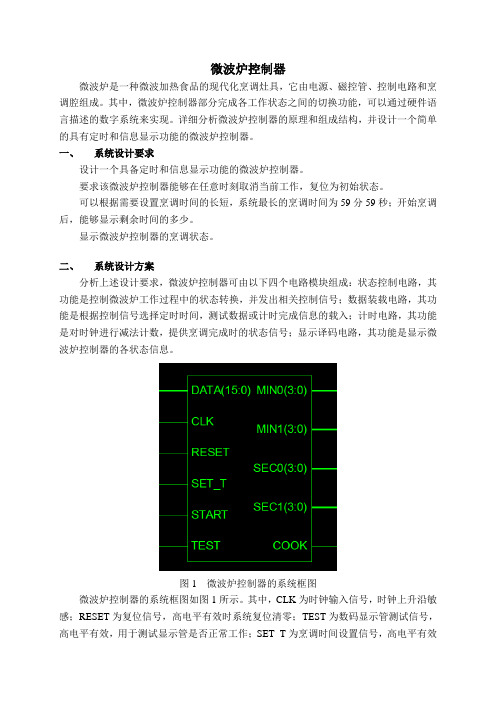
二、系统设计方案分析上述设计要求,微波炉控制器可由以下四个电路模块组成:状态控制电路,其功能是控制微波炉工作过程中的状态转换,并发出相关控制信号;数据装载电路,其功能是根据控制信号选择定时时间,测试数据或计时完成信息的载入;计时电路,其功能是对时钟进行减法计数,提供烹调完成时的状态信号;显示译码电路,其功能是显示微波炉控制器的各状态信息。
图1 微波炉控制器的系统框图微波炉控制器的系统框图如图1所示。
其中,CLK为时钟输入信号,时钟上升沿敏感;RESET为复位信号,高电平有效时系统复位清零;TEST为数码显示管测试信号,高电平有效,用于测试显示管是否正常工作;SET_T为烹调时间设置信号,高电平有效时允许设置烹调时间;DATA为定时时间输入信号,用于设置烹调时间的长短,其由高到低分别表示定时时间分、秒的十位,个位;START为烹调开始信号,高电平有效时开始烹调;输出信号COOK指示微波炉状态,高电平时表示烹调进行时;SEC0、SEC1、MIN0、MIN1分别表示秒个位、秒十位、分个位、分十位。
顶层模块的RTL原理图如下:微波炉控制器的工作流程如下:首先,对系统进行复位清零,使其各电路模块均处于初始状态;当烹调时间设置信号SET_T有效时,读入时间信号DATA[15…0]的取值,此时系统自动复位并显示设置的时间信息,按下开始键START,系统进入烹调状态,COOK信号变为高电平,时钟计数器开始减法计数,显示剩余烹调时间。
课程设计-微波炉控制器设计(一)-功能说明部分
微波炉控制电路说明书
主控制器采用82C52单片机设计,键盘扫描和显示器的显示采用8279来实现。
1. 通过“烹调键”“烧烤键”“解冻键”来设置不同的加热时间及加热活力,实现分段加热时序表的控制。
2. 通过“档位选择键”选择不同的加热活力,控制总输出功率的大小来实现不同档位的功率加热;同时通过LED数码管激发光二极管指示灯表示微波炉当前的工作状态。
3. 通过控制面版上的“10分”、“1分”、“10秒”、“1秒”时间设定的4个键,来设定加热时间,实现对加热时间的控制。
4. 任何时候可通过键盘的“测试键”可检测各数码管及发光管二极管的好坏。
5.各键功能说明如下:
1键————测试键
2键至6键——档位选择键
7键至10键——时间设置键
11键——开始键
12键——暂停键
13键——烹调选择键
14键——烧烤选择键
15键——解冻选择键。
基于Verilog的微波炉控制器的设计

基于FPGA 的微波炉控制器的设计一、设计任务及要求该实验主要完成微波炉控制器的设计。
主要功能有复位开关、模式选择、烹调时间设置、LED 指示烹调状态及数码管显示烹调剩余时间。
上电后,系统处于复位状态。
工作时首先进行烹调时间设置,并使用数码管显示时间信息,设要求最长的烹调时间为59分59秒,时间设置完毕后系统处于等待状态状态;选择开始烹调模式时系统进入烹调状态,时间显示数码管按每秒减1的倒计时方式显示剩余烹调时间;烹调结束后,系统回到复位状态。
二、设计方案及流程微波炉控制器系统主要有一下五个电路模块组成:分频模块、模式选择电路、时间设置电路、倒计时模块、显示模块。
分频模块完成系统50MHz 的时钟向1Hz 的分频,使计时器能够按照1S 的频率倒计时。
模式选择电路,其功能是控制微波炉工作过程中模式的切换,选择不同的模式系统计入不同的工作状态。
时间设置模块,该模块主要是可根据用户需求输入烹调时间;倒计时电路会根据用户所设置的时间进行倒计时,由数码管显示电路显示目前烹调状态,同时由LED 灯指示系统反正在烹调。
系统总体框图如下:系统的输入输出信号如下:输入clk ,key0,key1,key2,key3,key4五个信号,输出hex0,hex1,hex2,hex3,sec_flag ,cook 六个信号。
时间设置模块50MHz 分1Hz 的 分频模块数码管显示电路倒计时电路模式选择模块图1 系统总体框图clk作为50MHz分频模块的输入,时钟上升沿有效。
Key3作为模式选择信号,mode0表示系统进入分设置模块,mode1表示系统进入秒设置模块,mode2表示系统设置时间完成,进入烹调状态。
key2的作用是在mode0及mode1模式下对分、秒设置进行加操作,按一下分、秒加1。
key1的作用是在mode0及mode1模式下对分、秒设置进行减操作,按一下分、秒信号减1。
key0作为系统的复位信号,在不同模式下按下key0系统都会进入复位状态,数码管显示”0000”,cook标志的LED灯处于灭状态。
微波炉控制器的设计
SOPC/EDA综合课程设计报告设计题目:微波炉控制器的设计设计者:学号:班级:指导老师:王忠锋完成时间:2012年1月6日SOPC/EDA综合课程设计报告 (1)第一章微波炉定时控制器的设计方案分析 (3)1.1 系统设计的要求 (3)1.2 系统总体功能描述 (3)1.3 各模块的功能实现 (4)第二章微波炉定时控制器的设计步骤 (5)2.1状态控制器的设计 (5)2.1.1 controllor状态换图及端口图 (5)2.2数据装载器loader的设计 (6)2.3烹调计时器counter的设计 (6)2.3.1烹调计时器的内部组成原理图 (7)2.4显示译码器YMQ47的设计 (7)2.5锁存器的设计 (8)第三章微波炉控制器的VHDL源程序 (9)3.1状态控制电路VHDL实现 (9)3.2数据装载电路的VHDL实现 (11)3.3计时电路的VHDL实现 (12)3.4六进制减法计数器 (13)3.5计时电路模块设计 (14)3.6顶层模块的VHDL实现 (16)3.7显示译码YMQ47的VHDL实现 (18)3.8锁存SCQ的VHDL实现 (19)第四章总体原理图 (20)4.1 总体功能的顶层原理图 (20)第五章系统功能的仿真验证 (21)5.1 状态控制电路仿真波形图 (21)5.2数据装载电路的仿真 (21)5.3 计时电路仿真 (22)5.4微波炉控制器显示仿真 (23)5.5SCQ的仿真图 (23)5.6总体功能的仿真分析 (24)结束语 (25)参考文献 (26)第一章微波炉定时控制器的设计方案分析1.1 系统设计的要求现需设计一个微波炉控制器WBLCONTROLLOR,其外部接口如下图所示。
通过该控制器再配以4个七段数码二极管完成微波炉的定时及信息显示。
各信号的功能及要求如下:CLK是秒时钟脉冲输入,它接收每秒一个时钟脉冲的节拍信号。
RESET为复位信号,高电平有效,用于芯片的复位功能。
简易微波炉控制器的设计与实现

数电综合实验报告--简易微波炉控制器的设计与实现班级:姓名:学号:日期::设计课题的任务要求--------------------------------------------------- 3基本要求: ----------------------------------------------------------- 3提高要求: ----------------------------------------------------------- 3 二:系统设计(包括设计思路、总体框图、分块设计)----------------------- 3设计思路 ------------------------------------------------------------- 3总体框图 ------------------------------------------------------------- 4分块设计 ------------------------------------------------------------- 41 分频器---------------------------------------------------- 42:防抖模块-------------------------------------------------- 53:控制器---------------------------------------------------- 54:数据装载-------------------------------------------------- 64:倒计时模块------------------------------------------------ 75:译码模块--------------------------------------------------- 8 6:数码管驱动模块------------------------------------------- 87:火力显示------------------------------------------------- 98:led 显示模块--------------------------------------------- 109:蜂鸣器模块----------------------------------------------- 10三:仿真波形及波形分析------------------------------------------------- 111:控制器仿真----------------------------------------------- 122 数据装载仿真--------------------------------------------- 123 倒计时模块:--------------------------------------------- 134:decoder 译码电路模块-------------------------------------- 135:驱动数码管模块------------------------------------------- 146:led 显示模块--------------------------------------------- 147:蜂鸣器模块----------------------------------------------- 148:总体仿真------------------------------------------------- 15四:源程序------------------------------------------------------------- 151:分频器--------------------------------------------------- 152:防抖模块------------------------------------------------- 163:控制器--------------------------------------------------- 164:数据装载模块---------------------------------------------- 195:倒计时模块----------------------------------------------- 209:火力模块------------------------------------------------- 2611:蜂鸣器模块---------------------------------------------- 32五:功能说明----------------------------------------------------------- 33 六:元件清单和利用情况------------------------------------------------- 33 七:故障和问题分析----------------------------------------------------- 33八:总结和结论------------------------------------------ 错误!未定义书签。
09325332智能微波炉控制设计
智能微波炉控制设计微波炉电器结构图图1微波炉电器结构图XP.电源插座FU.熔断器ST.温控器T1.低压变压器S1 S2门联锁开关S3.门监控开关RT.热敏传感器K1 K2.继电器EL.炉灯M1.转盘电机M2.风扇电机T2.高压变压器 C.高压电容器V1.保护器二极管V2.高压二极管MT.磁控管概述本次设计的微波炉电器运行原理如下:把要烹饪的食物放入炉内,插上电源插头XP,关好炉门,此时继电器K2常开开关闭合,门联锁开关S1断开。
通过温控器ST来控制,继电器K1开关闭合,炉灯亮。
启动微波炉,门联锁开关S2闭合,转盘电机M1. 风扇电机M2通电运转。
若选择高温档,门监控开关S3闭合,高压变压器T2通电,磁控管MT连续发射微波加热;若选择其他档位,门监控开关S3处于通断交替状态,磁控管MT断续发射微波加热。
利用PLC良好的可编程性,快速的信号处理能力和控制能力,辅助以键盘的输入模块,声光显示模块等构成控制系统图2系统原理框图1·工作状态设置:指示灯灭并发出蜂鸣。
并在开门的瞬间使微波炉内的照明灯亮,当门关闭时该灯不亮,若门在规定时间内没有关闭,该灯也熄灭。
当温度上升到一定的值时,指示灯亮并发出蜂鸣表示过热,温度过热限度由键盘设置。
用于不同信息显示的切换。
可显示当前的设定时间、当前的炉内温度和设定的最高温度等。
快速设定当前加热时间和火力的合适烹调的值。
一般通过温度传感器将加热温度。
快速设定当前加热时间和火力的合适烘烤的值。
快速设定当前加热时间和火力的合适解冻的值。
用于设置加热的温度最高值。
有10分、1分、10秒的按键选择。
微波炉的控制面板如图下所示图2.5微波炉的控制面板示意3·温度自检模块温度自检电路采用高灵敏铂电阻R2(pt100),配合运算放大电路组成温度采集电路。
再经AD转换电路,进入控制系统,实现温度的适时控制,用户可输入加热温度,温度加热后自动停止加热。
从而实现自动控制。
EDA微波炉定时控制器的设计
目录1 设计要求概述 (1)2功能模块整体结构设计 (1)2.1系统总体功能描述 (1)2.2各模块的功能实现 (2)3各模块详细设计 (3)3.1状态控制器的设计 (3)3.2数据装载器loader的设计 (4)3.3烹调计时器counter的设计 (5)3.4显示译码器YMQ47的设计 (5)3.5锁存器的设计 (6)4逻辑仿真与时序仿真的实现 (6)4.1 各模块的VHDL源程序 (6)4.2时序仿真的实现 (17)5.设计结论 (19)6 参考文献 (20)1 设计要求概述现需设计一个微波炉控制器WBLCONTROLLOR,其外部接口如下图所示。
通过该控制器再配以4个七段数码二极管完成微波炉的定时及信息显示。
各信号的功能及要求如下:CLK是秒时钟脉冲输入,它接收每秒一个时钟脉冲的节拍信号。
RESET为复位信号,高电平有效,用于芯片的复位功能。
TEST为测试信号,高电平有效,用于测试4个七段数码二极管工作是否正常。
Start为开始加热信号,高电平有效,SET_T信号为定时设置信号,高电平时可以设置定时时间,DATA为定时的时间,cook为加热输出(用指示灯代替),另外四个输出分别表示显示的定时时间的分和秒。
2功能模块整体结构设计2.1系统总体功能描述现需设计的微波炉控制器WBLCONTROLLOR的外部接口如图1-1所示,通过该控制器,再配以七段数码二极管完成微波炉的定时信息和信息的显示。
图1-1 WBLCONTROLLOR的端口图各信号功能及要求如下:CLK是秒时钟脉冲输入,它接收每秒一个时钟脉冲的节拍信号。
RESET为复位信号,高电平有效,用于芯片的复位功能。
TEST信号是测试信号,高电平有效,用于测试七段数码管工作是否正常。
SET_T是烹调时间设置控制信号,高电平有效。
DATA0是一个16为总线输入信号,输入所设置的时间长短,它由高到低分为4组,每一组是BCD码输入,分别表示分、秒十位、个位的数字,如12分59秒。
微波炉定时控制器设计
微波炉定时控制器摘要:本文针对日常生活用品微波炉进行设计,使用VHDL语言实现多种常用功能,然后进行组合拼装,形成一个具有一定功能的硬件。
关键词:EDA,VHDL硬件描述语言,微波炉定时控制器。
目录一、设计题目和要求-----------------------------------------------------------------3二、方案分析与方案比较-----------------------------------------------------------4三、单元模块设计--------------------------------------------------------------------63.1、FENPIN模块设计-------------------------------------------------------63.2、FIRST模块设计--------------------------------------------------------73.3、JIANJISHU模块设计--------------------------------------------------83.4、CHOICE和VIEW模块设计--------------------------------------------10四、硬件实验-------------------------------------------------------------------------12五、收获与体会----------------------------------------------------------------------14附页:程序代码--------------------------------------------------------------------- 15参考文献-------------------------------------------------------------------------------23一、设计题目和要求设计题目为:微波炉定时控制器设计要求:1、复位开关:2、启动开关:3、烹调时间设置:4、烹调时间显示:5、七段码测试:6、启动输出:7、按TEST键可以测试七段码管,显示为“8888”;8、设定时间后,按启动键开始烹调,同时七段码显示剩余时间,时间为0时,显示烹调完成信息“CDEF”二、方案分析与方案比较方案一:刚开始准备用状态机做,鉴于题目的要求应该有五个状态,状态图为DONE/LD_DONE LD_DONE/COOK&TEST&SET_T/COOKRESETLD_8888DONE_MSG TIMERLAMP_TEST此方案的缺点是:在设定时间时需要四个按钮分别控制秒,十秒,分,十分4个数值的初始化加,另外有些状态转换不是很稳定,效果很难在实验板看出来,刚开始试了一下,没有成功;方案二:用一般的VHDL语言写,没有牵涉到状态,反而比较简单,而且设定时间可以采用两个按钮分别提供一个移位信号和一个加信号(这与实际比较相符),管脚绑定简单(特别是数码管),这里采用的是动态扫描位选输出数据,不需对四个数码管都进行绑定;综合比较发现还是方案二好,不仅程序简单,而且符合实际。
单片机毕业设计——可编程微波炉控制器系统设计
目录第1节引言 (2)1.1 可编程微波炉控制器系统概述 (2)1.2 本设计任务和主要内容 (3)第2节方案论证 (3)2.1 主控制器的选型 (4)2.2 计时方案选择 (4)2.3 显示方案选择 (5)2.4 音响发生方案选择 (5)2.5 温度方案选择 (5)2.6 火力控制分析选择 (5)2.7 信息控制分析选择 (6)第3节硬件电路设计 (7)3.1 系统控制原理 (7)3.2 基础系统模块 (8)3.2.1 显示器与键盘设计 (9)3.2.2 音响电路系统 (10)3.2.3 温度测量电路 (11)3.2.4 火力输出电路 (12)第4节软件设计 (13)4.1 主程序设计 (13)4.2 普通控制模式 (14)4.3 信息控制模式 (16)第5节实验结果与分析 (17)5.1 常规模式测试 (17)5.2 智能控制测试 (18)5.3 数据测试分析 (19)5.4 操作说明 (19)总结 (22)参考文献 (23)可编程微波炉控制系统设计第1节引言近年来随着科技的的发展,微波炉已经走进了千家万户的厨房,成为现代家庭的必备产品。
尽管微波炉也得到了很大发展,功能越来越完善。
为此,我们选择了本次电子设计大赛的这方面的题目,设计一个高质量的信息智能微波炉控制系统,使微波炉更人性化,使用更方便。
本可编程微波炉控制器系统,以A T89C52单片机为核心,由计时系统、手动键盘、温度测量、语音发声、网络控制器、状态显示等功能模块组成。
基于题目基本要求,本系统对功能设置、数据装入和定时设定功能进行了重点设计。
此外,扩展了液晶显示工作状态、数码管时间显示、微波火力档位设定、火力指示、温度测量与显示、语音提示、Internet远程控制等功能。
其中常规基础部分可以选择火力并设定加热时间,系统通过发光二极管显示选择的火力当。
系统启动后开始倒计时,数码管显示剩余时间。
此外系统还能通过温度传感器DS18B20测量事物的温度,通过LED显示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二、文献综述现有市售的微波炉其主要弊端为:不能按既有程序进行烹调,在节能方面也未做过多考虑。
烹调经验告诉我们,家常菜大多可按固定程序烹调、炖肉、煮饭、烘烤。
若采取分时、分档火力加热,则可节能。
微波炉控制系统功能比较齐全,在火力档位设了解冻、烹调、烘烤、保温、自定义加热、自定义烹调以及按给定程序烹调等七种主要功能,其中程序烹调共设置了八种不同的烹调流程,供用户选择。
在控制方面,实现了智能化,信息化管理,并且具有密码开锁功能,即只有知道相应模式键继续运行的号码的人,才能对该机进行操作等等功能。
STC12C5404AD单片机是具有全新流水线和精简指令集结构的高速率、低功耗新一代单片机。
它带有8路10位精度ADC、4路PWM/PCA(可编程计数器阵列)、SPI同步通信口以及内部集成的MAX810专用复位电路。
这些特点不但增加了开发者的使用灵活性,同时还可以帮助用户减小PCB尺寸和系统成本。
此外,STC12C5404AD型处理器还可以通过串口(P3.0/P3.1)直接下载用户程序,从而使其适合于在系统(ISP)及在应用(IAP)中编程,因而可为许多计算密集的嵌入式控制应用领域提供功能强大、使用灵活且性价比高的解决方案。
STC12C5404AD是STC系列单片机,采用RISC型CPU内核,兼容普通8051指令集,片内含有10KB Flash 程序存储器,2KB Flash 数据存储器,512B RAM 数据存储器,同时内部还有看门狗(WDT);片内集成MAX810专用复位电路、8通道10位ADC以及4通道PWM,具有在系统编程(ISP)和在应用编程(IAP),片内资源丰富、集成度高、使用方便。
STC12C5404AD对系统的工作进行实施调度,实现外部输入参数的设置、蓄电池及负载的管理、工作状态的指示等。
电磁式继电器一般由铁芯、线圈、衔铁、触点簧片等组成。
只要在线圈两端加上一定的电压,线圈中就会流过一定的电流,从而产生电磁效应,衔铁就会在电磁力吸引的作用下克服返回弹簧的拉力吸向铁芯,从而带动衔铁的动触点与静触点(常开触点)吸合。
当线圈断电后,电磁的吸力也随之消失,衔铁就会在弹簧的反作用力下返回原来J21,J22的位置,使动触点与原来的静触点(常闭触点)吸合。
同时常开触点断开。
这样选用合适的继电器就可以用小电压和电流控制大功率的设备,由于控制部分和触点电气绝缘,就比较方便和安全。
继电器有2个常开接点。
当产生较短时间的红外信号时,Q2经延时导通,C点为高电平,此时Q5导通,继电器动作,其接点J21,J22同时吸合,J22接通被控制的电器电源,J21闭合使继电器不通过Q2就继续吸合,这种情况通常称为“自锁”。
所以这时即使RI不再收到信号,因电源经R11向Q5提供偏置,故Q5一直保持导通。
当接收到较长时间的红外信号时,Q3导通,使得Q4导通这时Q5强迫截止,继电器中的磁感应线圈没有电流通过,衔铁释放。
被控电器电源断开,其接点J21,J22断开。
步进电机作为控制执行元件,响应速度快、定位精度高、无积累误差、驱动电路及控制方法简单,是机电一体化的关键产品之一,广泛应用在各种自动化控制系统和精密机械等领域。
但步进电机系统仍存在一些缺陷:低频共振、低速运行平稳性较差;高速运行的快速响应能力较差、易失步、效率较低等。
目前普遍认为最有效的解决方法是细分法。
常用的细分法是用单片机实现或将细分参数存在EPROM类非易失性存储器中通过逻辑电路实现细分输出。
然而此类方法存在单片机易受电机干扰,电路复杂、调试及研发周期较长等缺点。
本文提出一种利用FPGA设计技术实现步进电机控制电路的方案,具有修改方便,使用灵活,可靠性高,可移植性强等优点。
步进电机工作原理步进电机是一种将电脉冲转化为角位移的执行机构。
当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
步进电机区别于其他控制电机的最大特点是,通过输入脉冲信号来进行控制,即电机的总转动角度由输入脉冲数决定,而电机的转速由脉冲信号频率决定。
步进电机的驱动电路根据控制信号工作,控制信号由各类控制器来产生。
其基本工作原理如下:①控制换相顺序,通电换相。
这一过程称为“脉冲分配”。
例如:四相步进电机的单四拍工作方式,其各相通电顺序为A-B-C-D。
通电控制脉冲必须严格按照这一顺序分别控制A、B、C、D相的通断,控制步进电机的转向。
如果给定工作方式正序换相通电,则步进电机正转;如果按反序换相通电,则电机就反转。
这样就可以通过控制脉冲“相位”来改变定子绕组的通电顺序,从而达到控制电机正反转的目的。
②控制步进电机的速度。
如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步。
两个脉冲的间隔越短,步进电机就转得越快。
调整控制器发出的脉冲频率,通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机技术参数步进电机有一个重要的技术参数:空载启动频率,即步进电机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可能发生丢步或堵转。
在有负载的情况下,启动频率应更低。
如果要使电机达到高速转动,脉冲频率应该有加速过程,即启动频率较低,然后按一定加速度升到所希望的高频。
因此步进电机低速启动运转,若高于一定速度就无法启动,并伴有啸叫声。
步进电机细分驱动原理所谓细分驱动就是把机械步距角细分戍若干个电的步距角,当转子从一个位置转到下一个位置的时候,会出现一些“暂态停留点”,这样使得电机启动时的过调量或者停止时的过调量就会减小,电机轴的振动也会减小,使电机转子旋转过程变得更加平滑,更加细腻,从而减小了噪声。
步进电机的细分控制从本质上讲是对步进电机的励磁绕组中的电流的控制,使步进电机内部的合成磁场为均匀的圆形旋转磁场,从而实现步进电机步距角的细分。
相邻两合成磁场矢量之间的夹角大小决定了步距角的大小。
要想实现对步进电机步距角均匀细分控制,必须合理控制电机绕组中的电流,使步进电机内部合成磁场的幅值恒定;每个进给脉冲所引起的合成磁场的角度变化要均匀。
步进电机细分驱动技术可以减小步进电机的步距角,提高电机运行的平稳性增加控制的灵活性等。
步进电机驱动原理步进电机是将电脉冲信号转换成相应的角位移或直线位移的精密执行元件,它不能直接与交直流电源相连,而只能使用专用的步进电机控制器。
L297/298混合驱动电路L297单片步进电机控制器集成电路适用于双极性两相步进电机或单极性四相步进电机控制。
L297输出信号可控制L298双H桥驱动集成电路,用来驱动电压为46V,每相电流为2.5A以下的步进电机。
L297的核心是脉冲分配器。
它产生三种相序信号,对应三种不同的工作方式,分别为半步(HALFTEP)方式,基本步距(FULLSTEP,整步)一相激励方式,基本步距两相激励方式。
脉冲分配器内部是一个3bit可逆计数器,加上一些组合逻辑,产生每周期八步格雷码时序信号,此时HALF/FULL设置为低电平,即半步工作方式的时序信号。
也可以选择基本步距工作方式,即双四拍全阶梯工作方式,此时HALF/ULL设置为低电平。
L297设有两个PWM斩波器,目的是控制相绕组电流,实现斩波控制,以获得良好的转矩2频率特性。
每个斩波器由一个比较器、一个RS触发器和外接采样电阻组成,并设有一个公用振荡器,向两个斩波器提供触发脉冲信号。
脉冲频率f是由外接RC网络决定的,当R>10KΩ欧时,f=1/0.69RC。
振荡脉冲使触发器置“1”,电机绕组相电流上升,采样电阻Rs的电压上升到基准电压Vref时,比较器翻转,使触发器复位,功率开关关断,电流下降。
等待下一个振荡器脉冲的到来。
这样,触发器的输出是恒频的PWM信号,调制L297的输出信号。
相绕组电流峰值由Vref来整定。
L298是双H桥高电压大电流功率集成电路,可驱动继电器、线圈、直流电机和步进电机等电感性负载。
输入为标准的TTL逻辑电平信号,用来控制H桥的开与关。
L298集成芯片为具有15个引脚的多瓦数直插式封装,由于发热量大,要加装散热器。
数码管的驱动分为动态驱动和静态驱动两种。
[9]所谓静态驱动,就是将数码管每个LED灯对应一个I/O 口,通过单片机的端口来控制LED灯的亮和灭。
I/O口之间互相独立。
这样的优点是驱动很简单,只需要用I/O口直接控制LED.一般来说,静态驱动比动态驱动占用的I/O口多。
但静态驱动方式简单不容易出错。
步进电机是一种将电脉冲转换为角位移的执行机构。
当步进驱动器接收到一个脉冲信号,就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),旋转是以固定的角度一步一步运行的。
可以通过控制脉冲频率来控制电机转动的速度和加速度,进行调速。
步进电机可以作为一种控制用的特种电机,利用其没有积累误差的特点,广泛应用于各种开环控制。
现在比较常用的步进电机,包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)和单相式步进电机等。
永磁式步进电机一般为两相,转矩和体积较小,步进角一般为7.5°或15°;反应式步进电机一般为三相,可实现大转矩输出,步进角一般为1.5°,但噪声和振动都很大。
反应式步进电机的转子磁路由软磁材料制成,定子上有多相励磁绕组,利用磁导的变化产生转矩。
混合式步进电机是指混合了永磁式和反应式的优点。
它又分为两相和五相:两相步进角一般为1.8°,而五相步进角一般为0.72°。
与静态显示方法不同,动态显示驱动的设计方法是将数码管的驱动端一对一连接在一起接单片机的数据口,而将各个数码管的公共端单独送至单片机的I/O进行片选。
通过片选信号依次点亮各个数码管,由于人眼有视觉暂留的特性,因此如果第一个数码管灭和第二个数码管亮之间的时间足够短,人眼是感觉不出数码管的变化的。
微波炉控制器的设计【摘要】在现代人快节奏生活中,微波炉已经成为便捷生活的一部分。
随着控制技术和智能技术的发展,微波炉也向着智能化、信息化发展。
本文主要给出基于单片机控制的可编程的微波炉定时系统。
除了可以实现常规的火力大小选择和定时控制基本功能之外,又用步进电机模拟微波炉的转盘。
该设计由数码管显示时间,发光二极管显示火力大小,时间结束时蜂鸣及步进电机模拟微波炉的转盘等模块构成。
引言 (3)1、系统总体设计 (3)1.1 设计要求 (3)1.2 系统组成方框图 (3)2、芯片性能特点介绍 (4)2.1 单片机STC12C5404AD (4)2.2 高耐压、大电流达林顿陈列-ULN2003 (4)2.3 四位数码管 (6)2.4 继电器 JRC-21F(4100) (6)2.5 步进电机M42SP-5 (7)3、系统硬件设计 (8)3.1 显示模块 (8)3.2按键电路 (8)3.3蜂鸣模块 (8)3.4 火力档位选择模块 (9)3.5 步进电机驱动模块 (10)4、系统软件设计 (11)4.1主程序流程图 (11)4.2按键扫描流程图 (12)4.3定时0中断流程图 (14)4.4定时1中断流程图 (15)5、系统测试及分析 (15)6、结论 (16)致谢词 (16)参考文献 (16)附录 (17)1.protel原理图 (17)2.PCB图 (17)3.元件清单 (18)4.程序清单 (18)引言微波炉是一种用微波加热食品的现代化烹调灶具。