AUTOCAD用于墨卡托投影到高斯克吕格投影的变换
CAD大地坐标转换施工坐标
CAD大地坐标转换施工坐标概述在工程建设和土地测量中,CAD(计算机辅助设计)软件常用于设计、绘图和地理信息系统(GIS)分析。
CAD软件使用大地坐标系统来表示和显示地理位置。
然而,当需要在实际施工场地上进行施工时,常常需要将CAD中的大地坐标转换为施工坐标。
本文将介绍CAD大地坐标和施工坐标的定义,并详细阐述CAD大地坐标转换为施工坐标的方法。
CAD大地坐标和施工坐标的定义CAD大地坐标CAD大地坐标是基于地球椭球体的经纬度坐标系统,通常使用经度和纬度以及海拔高度来表示地球上的点。
在CAD软件中,经度表示东西方向的距离,纬度表示南北方向的距离,海拔高度表示地点相对于平均海平面的高度。
CAD大地坐标采用具体的坐标系,如WGS84、GCS Beijing 1954等。
不同的坐标系在选取和计算上均有一些差异,因此在进行坐标转换时需要注意。
施工坐标施工坐标通常以某一现实地物为基准,以便实际施工测量、放样和布控。
施工坐标一般采用平面坐标系统,如UTM(世界通用横轴墨卡托投影)坐标系,其中坐标以东西方向和南北方向的距离表示。
施工坐标通常以某个已知的控制点为基准进行测量,通过在实地上测量和计算,可以得到各个构件或测量点的坐标。
施工坐标以X和Y坐标表示平面位置,没有海拔高度。
CAD大地坐标转换施工坐标的方法CAD大地坐标转换为施工坐标的方法需要对大地坐标进行投影转换和坐标系转换。
1.投影转换大地坐标通常使用经纬度表示,但施工坐标使用平面坐标表示。
因此,需要将大地坐标进行投影转换,将经纬度转换为平面坐标。
常用的投影方法有经纬度转UTM投影和经纬度转高斯克吕格投影。
经纬度转UTM投影是将经纬度坐标投影到地球上的UTM坐标系中,其中每个地区根据其位置采用不同的投影带。
经纬度转高斯克吕格投影是将经纬度坐标投影到高斯克吕格投影坐标系中,用于较小的区域。
2.坐标系转换投影转换后的大地坐标已经是平面坐标,但仍然使用大地坐标系。
墨卡托投影、高斯-克吕格投影、UTM投影及我国采用的6度分带和3度分带
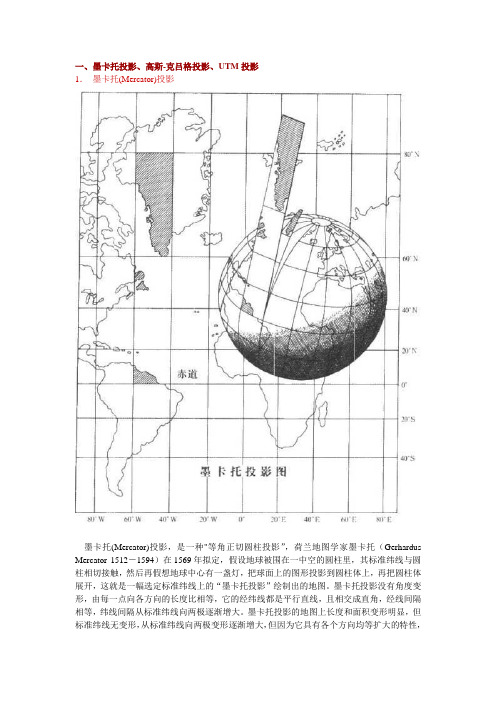
一、墨卡托投影、高斯-克吕格投影、UTM投影1.墨卡托(Mercator)投影墨卡托(Mercator)投影,是一种"等角正切圆柱投影”,荷兰地图学家墨卡托(Gerhardus Mercator 1512-1594)在1569年拟定,假设地球被围在一中空的圆柱里,其标准纬线与圆柱相切接触,然后再假想地球中心有一盏灯,把球面上的图形投影到圆柱体上,再把圆柱体展开,这就是一幅选定标准纬线上的“墨卡托投影”绘制出的地图。
墨卡托投影没有角度变形,由每一点向各方向的长度比相等,它的经纬线都是平行直线,且相交成直角,经线间隔相等,纬线间隔从标准纬线向两极逐渐增大。
墨卡托投影的地图上长度和面积变形明显,但标准纬线无变形,从标准纬线向两极变形逐渐增大,但因为它具有各个方向均等扩大的特性,保持了方向和相互位置关系的正确。
在地图上保持方向和角度的正确是墨卡托投影的优点,墨卡托投影地图常用作航海图和航空图,如果循着墨卡托投影图上两点间的直线航行,方向不变可以一直到达目的地,因此它对船舰在航行中定位、确定航向都具有有利条件,给航海者带来很大方便。
“海底地形图编绘规范”(GB/T 17834-1999,海军航保部起草)中规定1:25万及更小比例尺的海图采用墨卡托投影,其中基本比例尺海底地形图(1:5万,1:25万,1:100万)采用统一基准纬线30°,非基本比例尺图以制图区域中纬为基准纬线。
基准纬线取至整度或整分。
墨卡托投影坐标系取零子午线或自定义原点经线(L0)与赤道交点的投影为原点,零子午线或自定义原点经线的投影为纵坐标X轴,赤道的投影为横坐标Y轴,构成墨卡托平面直角坐标系。
2.高斯-克吕格(Gauss-Kruger)投影和UTM(Universal Transverse Mercator)投影(1)高斯-克吕格投影性质高斯-克吕格(Gauss-Kruger)投影简称“高斯投影”,又名"等角横切椭圆柱投影”,地球椭球面和平面间正形投影的一种。
墨卡托转gcj02公式
墨卡托转gcj02公式
摘要:
1.墨卡托投影公式简介
2.gcj02 投影公式简介
3.墨卡托转gcj02 公式的推导过程
4.墨卡托转gcj02 公式的应用领域
正文:
一、墨卡托投影公式简介
墨卡托投影公式,全称为Mercator 投影公式,是一种将地球表面的经线和纬线转换为平行于赤道的等间隔直线和等间隔梯形的投影方法。
该投影公式能够保持地图上的航线直线,因此在航海、航空等领域有着广泛的应用。
二、gcj02 投影公式简介
gcj02 投影公式,全称为高斯克吕格投影公式,是一种将地球表面的经线和纬线转换为横轴为经线、纵轴为纬线的投影方法。
该投影公式能够保持地图上的面积不变,因此在我国地图制图、工程测量等领域有着广泛的应用。
三、墨卡托转gcj02 公式的推导过程
墨卡托转gcj02 公式的推导过程较为复杂,涉及到诸多的数学计算和公式变换。
在此过程中,需要将墨卡托投影公式中的经纬度坐标转换为高斯克吕格投影公式中的横纵坐标,通过一系列的坐标变换和公式计算,最终得到墨卡托转gcj02 的投影公式。
四、墨卡托转gcj02 公式的应用领域
墨卡托转gcj02 公式在多个领域有着广泛的应用,如在地图制图领域,可以将不同投影方式的地图进行统一,便于地图的阅读和使用;在导航定位领域,该公式可以将全球范围内的经纬度坐标转换为特定区域的横纵坐标,提高定位的精度和效率。
高斯投影

高斯坐标即高斯-克吕格坐标系(1)高斯-克吕格投影性质高斯-克吕格(Gauss-Kruger)投影简称“高斯投影”,又名"等角横切椭圆柱投影”,地球椭球面和平面间正形投影的一种。
德国数学家、物理学家、天文学家高斯(Carl FriedrichGauss,1777一1855)于十九世纪二十年代拟定,后经德国大地测量学家克吕格(Johannes Kruger,1857~1928)于1912年对投影公式加以补充,故名。
该投影按照投影带中央子午线投影为直线且长度不变和赤道投影为直线的条件,确定函数的形式,从而得到高斯一克吕格投影公式。
投影后,除中央子午线和赤道为直线外,其他子午线均为对称于中央子午线的曲线。
设想用一个椭圆柱横切于椭球面上投影带的中央子午线,按上述投影条件,将中央子午线两侧一定经差范围内的椭球面正形投影于椭圆柱面。
将椭圆柱面沿过南北极的母线剪开展平,即为高斯投影平面。
取中央子午线与赤道交点的投影为原点,中央子午线的投影为纵坐标x轴,赤道的投影为横坐标y轴,构成高斯克吕格平面直角坐标系。
高斯-克吕格投影在长度和面积上变形很小,中央经线无变形,自中央经线向投影带边缘,变形逐渐增加,变形最大之处在投影带内赤道的两端。
由于其投影精度高,变形小,而且计算简便(各投影带坐标一致,只要算出一个带的数据,其他各带都能应用),因此在大比例尺地形图中应用,可以满足军事上各种需要,能在图上进行精确的量测计算。
(2)高斯-克吕格投影分带按一定经差将地球椭球面划分成若干投影带,这是高斯投影中限制长度变形的最有效方法。
分带时既要控制长度变形使其不大于测图误差,又要使带数不致过多以减少换带计算工作,据此原则将地球椭球面沿子午线划分成经差相等的瓜瓣形地带,以便分带投影。
通常按经差6度或3度分为六度带或三度带。
六度带自0度子午线起每隔经差6度自西向东分带,带号依次编为第1、2…60带。
三度带是在六度带的基础上分成的,它的中央子午线与六度带的中央子午线和分带子午线重合,即自1.5度子午线起每隔经差3度自西向东分带,带号依次编为三度带第1、2…120带。
墨卡托投影、高斯-克吕格投影、UTM投影、兰伯特等角圆锥投影

1.墨卡托(Mercator)投影1.1 墨卡托投影简介墨卡托(Mercator)投影,是一种”等角正切圆柱投影”,荷兰地图学家墨卡托(GerhardusMercator1512-1594)在1569年拟定,假设地球被围在一中空的圆柱里,其标准纬线与圆柱相切接触,然后再假想地球中心有一盏灯,把球面上的图形投影到圆柱体上,再把圆柱体展开,这就是一幅选定标准纬线上的“墨卡托投影”绘制出的地图。
墨卡托投影没有角度变形,由每一点向各方向的长度比相等,它的经纬线都是平行直线,且相交成直角,经线间隔相等,纬线间隔从标准纬线向两极逐渐增大。
墨卡托投影的地图上长度和面积变形明显,但标准纬线无变形,从标准纬线向两极变形逐渐增大,但因为它具有各个方向均等扩大的特性,保持了方向和相互位置关系的正确。
在地图上保持方向和角度的正确是墨卡托投影的优点,墨卡托投影地图常用作航海图和航空图,如果循着墨卡托投影图上两点间的直线航行,方向不变可以一直到达目的地,因此它对船舰在航行中定位、确定航向都具有有利条件,给航海者带来很大方便。
“海底地形图编绘规范”(GB/T17834-1999,海军航保部起草)中规定1:25万及更小比例尺的海图采用墨卡托投影,其中基本比例尺海底地形图(1:5万,1:25万,1:100万)采用统一基准纬线30°,非基本比例尺图以制图区域中纬为基准纬线。
基准纬线取至整度或整分。
1.2 墨卡托投影坐标系取零子午线或自定义原点经线(L0)与赤道交点的投影为原点,零子午线或自定义原点经线的投影为纵坐标X轴,赤道的投影为横坐标Y轴,构成墨卡托平面直角坐标系。
2.高斯-克吕格(Gauss-Kruger)投影和UTM(UniversalTransverseMercator)投影2.1 高斯-克吕格投影简介高斯-克吕格(Gauss-Kruger)投影,是一种“等角横切圆柱投影”。
德国数学家、物理学家、天文学家高斯(CarlFriedrichGauss,1777一1855)于十九世纪二十年代拟定,后经德国大地测量学家克吕格(JohannesKruger,1857~1928)于1912年对投影公式加以补充,故名。
AUTOCAD用于墨卡托投影到高斯克吕格投影的变换
AUTOCAD用于墨卡托投影到高斯克吕格投影的变换理论和方法.根据不同的需要,地图镧圈中常常采用不同的投影方式:如地形图采用高斯一克吕格投影,海图通常采用墨卡托投影.由于地图数学基础不同,不同投影方式的资料难以直接转绘,拼接.长期以来?投影变换都是采用照相拼贴.膜片怯,纠正仪转绘等方法来达到投影变换的目的.从理论上分析?这种变换是局部区域点间的模拟坐标变换?无法保证及估算点的变换精度.而且手工方法,效率很低.海岛面积造算采用1:1万地形图作为量算工作底图?其中海岛滩地面积定义为:零米线等深线与海岸绞(平均高潮位)所包围的面积.而采用的资料中,l:1万地形图中没有表示零米线,必须从海图转绘.海图资料由于采用墨卡托,高斯,平面等几种不同的投影方式?且比倒尺,分幅范围与地形图不同,如果采用手工转换方法,则不仅需花费大量的人力,物力,而且工作周期较长?精度也不能满足要求.采用计算机数据处理?可E』圆满解决地图投影变换问题.逐点解析计算?理论上排除了投影转换的误差.灵活的数据处理功能,大大减少了工作量,输出形式的多样化能满足不同的制图需要.本文结合××省海岛位置?面积,岸线长度量算课题中投影变换软件的编制,介绍如何利用计算机辅助设计软件AUTOCAD实现投影变换的自动化.=,■卡托投辱,膏斯一克且格投嚣的计算公式1_墨卡托投影的计算公式.正解X=r.lnU;Y—r0l(1)式中:U~tg(45’+B/2)×[(1一e$inB)I(1+esinB)】’ro~0CO$B./Q--e.sinBo),’丑.反解L=y/r.(2)B=rp+BJsin2+丑.sin4+B?sin6式中:rp=2arctg(e)一=/2ro=N0CO$BDN.=a/Q—e.sinBo)q=x/r0B2=9.38560696x19一’B.=9.65698449×19一’B.26.17492862×i0一e一2.7182818459丑.基准纬度2.高斯一克吕格投影的计算公式=x0+(N/2)sinBcos日工’+(N/24)sinBcosB(5一f+0+4’)L’+(N/72O)sinBcos日(6l一58f’+-r’)L’Y=Ncos丑L+(N/6)eos日(1一.+”)L+(N/129)cosB(5一l8f+-r’+14”‘一56r}f)L式中:Xo=口(1一e.)(Aarc丑一日/2sin2B +c/4si~4B-D/6sln6B)为平行圜所截的中央经线弧长.;L,丑为投影点的羟纬度;掺,彩一纪报墨通测蹬通报1994年亲2期=上一L,,L.为投影带中央经线的经度;At=a/C1一e’sln.B).为卵酉曲率半径;口8.COS日;f=tgB克拉索夫斯基椭球元素为:口=6378245m:6—6366863.01877m:g;=0.006693421623;8=O.006Z38625416;一1.00505I7i39:暑0.00506237764:C=O.00001062461;D一0.00000002081软件采用间接方法实现投影变换,即根据海圉图纸坐标?由(2)式反解经纬度L再根据(3)式计算高斯一克吕格投影坐标.三,程序设计思想程序设计基于数据输八,数据处理,数据输出三大模块.如何取得良好的操作界面(如图形编辑)及最小的输八工作量,保证变换的犄度是设计的基本出发点.AuTOCAD作为美国AUTODESK公司推出的专用计算机辅助设计图形软件包,具有功能强大的图形输入,编辑,输出功能?近来已广泛应用子机械,建筑,规划设计等各个方面.但要解决地图投影变换问题,必须解决以下三个问题:1.图纸不均匀伸缩变形改正AUTOCAD图纸输入采用二个已知点定位定向公井:X=Rz(xCOS日一ysln口)l,=Ry(xsia日~ycos口)AUTOCAD图纸输八程序中设定Rx=Ry即,Y方向的伸缩率相等.显然,由于图纸纸纹方向的影响,,l,方向的伸缩变形是不可能一致的,如果直接用上式公式计算必然产生较大的扭曲,即系统误差.因此,在精度要求较高的投影变换中,必须考虑对投影的影响.经精变检测试验证实,图纸伸缩是投影误差的主要来源之一.2.投影变换计算AUTOCAD是一十图形处理软件包,虽提供AUTOLISP编程语言,但缺乏数据AD/TABLET程序驱动.AuT0cAD数字化板配置完成后,即可键八TABLET命令,这时要求数字化两个不同位甓的定向点(对角点)并从键盘输A相应的理论坐标(图纸坐标系).蓦1994年第2期澍绘通报29由于海图采用矩形分幅,图纸理论尺寸Ⅱ,b已知,即可假设左下角图廓点的坐标为(o,o),右上党的坐标为(Ⅱ,6).定向完成后,建立了数字化扳坐标系与图纸坐标系的转换关系依次用点方茸数字化四个图廓点,作为定向改正的原始鼓据诲圈比例尺一般较小,因此零米线在图【l扛率变化很大,如采用点方式逐点跟踪,则采集量大,密度也难以控制,跟踪精度不能保证AUTOCAD的自动跟踪方井(SKETCH)提供了一种便利的输八方,实际使用时设定采样间隔,计葬机就自动从辅人的坐标流中抽取采样点,如跟踪速度太快则发出嘟嘟声提醒放慢速度.实际数字化时两种方式同时采用,主要取决亍曲线的形状,完成整幅图数字化后进行局部放大,对照图面检查校桉,如有错误时则编辑改正,最后存八磁盘1.数据处理ACAD图形数据库是以一种非常紧凑的方式存储,一般用户难以直接读取,另外安装在不同机器上的ACAD可能采用不同的内部数据格才.ACAD提供了一个ASC码的”图形交换文件”以便供其它高级语言调用,该命令是在ACAD/CO—MMAND命令提示符下键人DxFOUT生成的.其结构如下:标题段表段块段实体段文件结束段每个段由多个组组成,每个蛆占tDXF文件的两行,第一行是组代码,第二行是组值,除实体段外?其它段均为一些描述性信息,可以忽略.以下给出一个很简单的图形(--条折线)的?DXF文件形式(gO体段部分)程序编制就是提取实体段的坐标信息,见程序框图2.2.图纸变形改正程序规定数组D(,y)I=1,2,3,4存放四个海图图廓点的数字化仪坐标,根据已知的理论坐标值(O,0),(0,5),Ca,6),Ca,0),用六参数仿射变换方程计算图纸变形改正系数Xffiax+by+cY~dx+e,v+fSECTION块段2ENTITIES实体段LINE8102.748383207.120t31300.01l4.264623217.dO30263100LINE8k—k+1lO4264623207.403026300.0115.857434217.428717310.0ENDsEc块段结束0EOF文件结束插入线段起点信息图2利用最小二乘法组成法方程解算系数,将数组D CX,y)所有坐标均换算成变形改正后的正确的海图坐标系坐标值.3,投影变换计算测绘通报1994年第用投影变换公式(2)根据海图坐标系的坐标值,,可计算出该点的地理坐标(凸L),根据(3)式计算出高斯坐标,对坐标数组每个点逐个计算并全部换算成高斯坐标.由于每幅海图坐标数据量高选上万个以上,编制程序耐采用数姐覆盖(边输入,边处理,边输出)的动态处理方法,可大大减少计算机存储空间并突破了计算机内存的限制.4.写入?DF文件ACAD可以输出-DXF文件,也可以滨A标准的-DXF文件,不管是AcAD文件本身输出的或由其它程序语言形成甚至用文本编辑产生的.只要其格封符合标准.利用ACAD驱动绘图仪输出,必须形成ACAD内部.DWGf绘图文件),ACAD的D2FIN是专门用以转换?DF成-DWG文件的.投影变换后的坐标保留在数组内,把每个坐标写A-DXF文件,实际上为读人?DXF文件的逝过程,编制中的主要嚼题是确定线段的起始点坐标以彤成正确的图形.对于分跨两个投影带的海图,剧分别计算相应的投影坐标.5.躅幅拼接和公里网迭加前已提厦每幅海图落幅不规则,比倒尺也不统一对每幅海图投影变换后,要进行接边.方法是因每幅海图已形成DXF文件.可在AcAD环境下,用DXFIN逐幅输A,编辑,修改拼接后形成同一投影带内整个区域图幅公里网,图号图廓癌是投影转绘必须的定向元素(输出在图纸b与l:1万地形图套绘)本次利用BASIC语言,编制一千定向元素绘图文件生成程序(见图3).定向元可绘图文件定义为单独的一图层,覆盖在已生成的零米臻区域图上.通过绘图仪输出6.图形输出ACAD可驱动各类绘翩庄,在完成对所用绘图均配置及y方向比侧校正后,用鼠栝器按需要的图廓线遥幅选取,并按相应比例尺输出图纸.五,精度揎澍为保证程序运行的正确性及评估转绘的精度,进行精度检测是十分必要的资料:海图:N13421比例尺:1:350O0基准纬度:30.4000设备:AST3s6SX/16计算机,CALC0MP01480数字化仪图32期AUT0CAD2.62软件及AUTO—cAD接口程序,数据处理程序.方珐:1,用数字化仪在诲圈上采取经纬线交点坐标,经数据处理,直接输出经纬线交点在高斯投影(3度带)上的高斯坐标.2.根据经纬度用公计算高斯坐标(理论值).3.图纸变形改正前后投影精度比较.经52十交点坐标计算中误差:M一28.2m图tO.80ramM:一8.9m图上O.25ramM,工4.2m图上0.41ramM:=8,4m图上0.24ramM.rO.90ramM:,0.35ram经图纸变形改正后,基本上消除了坐标的系统误差,据文献[2]海图成图误差为O.36m妞,固此可以认为投影转绘误差小于海图零米线成图误差,即转绘引起的滩地面积误差可以忽略不计.六.结柬语xX省岛屿数量多,海岛面积滩地面积量算工作量大,情况复杂,其中零米线转绘工作直接影响滩地量算的精度,覆盖岛屿有各种比例尺海图85幅,1:1 万面积量算工作底图435幅,分布在两个投影带内, 可以想象,用一般方法是难胜任的.(下转第9页)l994年第2期测绘通报g性.如果一个估计方法,在实际情况与假定模型相差较小时其性能变化也较小,则称它是稳健的,从实用观点看,应该说稳健性主要是一个相比较而存在的概念.不存在什么”最稳健”的估计方法.但是给了两个处理同一问题的估计方法,可蹦从某种角度去考察谁的稳健性更好一些.稳健估计方法很多,基本的稳健估计类有三种,极大似然估计(M估计),顺序统计量线性组合型估计(L估计)和秩检验型估计(R估计).目前,只有M估计较有实用价值,也较易实施.M估计不是一个确定的估计,而是指一娄估计,一般可分为选权迭代法和P一范数最小法.选权迭代怯,一般形宣为,(V)=VP(V)V=mi~1:一工(53式中,P()是残差的某种函数,为简单起见,通常取P()为对角阵.选取不同的P()就代表一种选权选代法.P()的元素可以是残差.的函数,也可以是标准化残差的函型其形式可以是幂函数, 也可能是指敉函数.当P()=P为一对角常数阵时,则选权迭代法变为经典平差法.范数最小法,一般形为0VII=m,l≤P<21V一且一工JL,式中P的最有利范围有的文献认为在1.0-1.5之间或1.2-1.5之间当P=1时,就是残差绝对值最小和法,即,一范数最小法,当P=2时,就是经典最小二乘法.十=,近代瓣■平差的特点近代侧量平差的内容非常丰富,其主要特点是,观测值概念广义化了,从处理随机独立的观删数据. 发展到可以处理随机相关的观’删数据;扩展了经典测量平差的数学模型,从满秩平差问题,发展到降秩平差问题,从仅处理随机变量,发展到一并处理随机过程,从侧重于平差函数模型的研究,发展到也重视随机模型的研究,从不顾及模型误差.发展到颇及模型误差;针对最小二乘估计的局限性揖出了有偏估计和稳健估计.t1]阵希孺,l987.[2]王橙桂1987.主要参考文献王橙挂:近代回归分析,安徽教育出版社线性摸型的理论及其应用安教教育出版杼t3]A.布耶哈马着.魏子卿译:误差理论和广义逆矩阵测绘出版社,1980.t4E.M.MiKhail等着,唐昌先,邹笃酵译;观铡与最小二乘法.铡绘出版社.1984.【5P.Melssl着.同济大学测量系译:最小二乘平差近代方i击,稻结出版社.1985.t6]H.Morltz着.丘其宪等译:最小二乘拟台推估怯.飒} 绘出版廿.1980.f1]D.E.Wells等着.曾启雄译:最小二乘法.飒I绘出版社.1980.£8]刘大杰于正林:广义平差原理.上,下册.武汉铡绘学院1985.:0】崔希璋等:测量平差的现状和发展,莉量平差理论厦其应用学术讨论会论文.1985.[101李德仁:误差处理和可靠性理论.测绘出版社.1988. [¨黄维彬:近代平差理论及其应用,解放军出版社.1992.[12]黄维彬:最小二乘滤波,推估和配置.1981.[1钉黄维椎:近1七平差的现状和展望.1991.[1盯黄维彬;参数具有先验统计性质的平差方法.1989.[15]黄维彬:测量平差的当代进展.1989.‘‘‘‘‘qqqqqqq’’’’’’q’_q’’’_’’’’’’’’’_’’’’’’_’’_(上接第3O页)~经实际使用,证明该程序方法台理,手段先进,太大提高了工作效率,数据栗集灵括,便利,操作简单,可输出任意比俩尺的图幅图纸.程序适用性强.随着计算机,人工智能技术的不断发展,地理信息系统的理论和技术将成为经济建设,自然灾害预防,资源调查等有力工具,地理信息系统的基本数据一空间数据主要来自地髟图,航空像片,遥感图像等介质如何输八计算机中形成一个统一的坐标系是建立地理数据库的关键问题,其中投影变换是数据处理的一十必不可少的环节,本文的目的也在于抛砖引玉,供同行参考参考文献1.在电子计算机辅助制图情况下地图投影变换的研究.《地图投影论文集》.测绘出版社,lgB3年.2.新编大比例尺航海母制图精度分析.。
AutoCAD进行卫星影像配准套合

AutoCAD进行卫星影像配准套合第一步工具准备AutoCAD2008下载地址:/s/1bnhpWthAutoCAD2014(64位)下载地址:/s/1o6pItVsBIGEMAP地图下载器:/Home/Product/index.html 案例:等高线完美套合卫星影像教程本实例使用AutoCAD2008软件进行影像与矢量数据叠加配准。
第一步影像下载影像须使用BIGEMAP地图下载器中Google Earth无偏移影像,并具有无Google 小水印、免封IP、影像更新更快等特点。
首先在图源列表中选中Google Earth图源,实现与矢量数据准确套合、叠加。
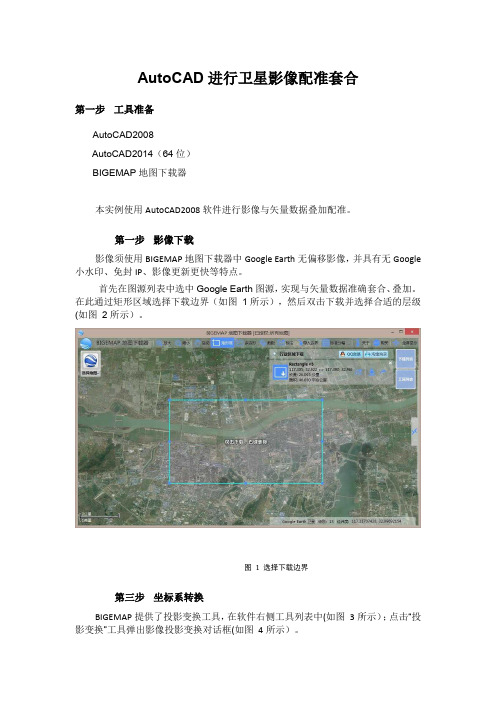
在此通过矩形区域选择下载边界(如图1所示),然后双击下载并选择合适的层级(如图2所示)。
图1 选择下载边界第三步坐标系转换BIGEMAP提供了投影变换工具,在软件右侧工具列表中(如图3所示);点击“投影变换”工具弹出影像投影变换对话框(如图4所示)。
图3 工具列表图4 影像投影变换对话框参数说明:1. 源文件:需要转换的源影像图片,支持含投影信息及放射变换参数的影像文件。
2. 源坐标系:自动读取源文件的坐标信息。
此例中源坐标系为WGS84。
3. 输出文件:选择输出影像图片的文件名,支持输出GeoTiff、BMP、Erdas Imaging。
4. 目标坐标系:要转换到的目标坐标系[1]。
此例中需转换到北京54高斯投影3度带117E子午线。
5. 重采样算法:重采样算法影响图像转换质量,数量越好相对速度越慢,可根据需要选择。
6. 变换参数:目标坐标系与WGS84坐标系之间的转换参数(ToWGS84),若无参数可不勾选“指定变换参数”。
通常项目使用的测量坐标系与WGS84是不同椭球面之间转换,如北京54、西安80、CGCS2000等。
一般而言用七参数布尔莎模型比较严密,即X 平移,Y 平移,Z 平移,X 旋转(WX),Y 旋转(WY),Z 旋转(WZ),尺度变化(DM)。
AutoCAD进行卫星影像配准套合
AutoCAD进行卫星影像配准套合第一步工具准备AutoCAD2008AutoCAD2014(64位)BIGEMAP地图下载器本实例使用AutoCAD2008软件进行影像与矢量数据叠加配准。
第一步影像下载影像须使用BIGEMAP地图下载器中Google Earth无偏移影像,并具有无Google 小水印、免封IP、影像更新更快等特点。
首先在图源列表中选中Google Earth图源,实现与矢量数据准确套合、叠加。
在此通过矩形区域选择下载边界(如图1所示),然后双击下载并选择合适的层级(如图2所示)。
图 1 选择下载边界第三步坐标系转换BIGEMAP提供了投影变换工具,在软件右侧工具列表中(如图3所示);点击“投影变换”工具弹出影像投影变换对话框(如图4所示)。
图 3 工具列表图 4 影像投影变换对话框参数说明:1. 源文件:需要转换的源影像图片,支持含投影信息及放射变换参数的影像文件。
2. 源坐标系:自动读取源文件的坐标信息。
此例中源坐标系为WGS84。
3. 输出文件:选择输出影像图片的文件名,支持输出GeoTiff、BMP、Erdas Imaging。
4. 目标坐标系:要转换到的目标坐标系[1]。
此例中需转换到北京54高斯投影3度带117E子午线。
5. 重采样算法:重采样算法影响图像转换质量,数量越好相对速度越慢,可根据需要选择。
6. 变换参数:目标坐标系与WGS84坐标系之间的转换参数(ToWGS84),若无参数可不勾选“指定变换参数”。
通常项目使用的测量坐标系与WGS84是不同椭球面之间转换,如北京54、西安80、CGCS2000等。
一般而言用七参数布尔莎模型比较严密,即X 平移,Y 平移,Z 平移,X 旋转(WX),Y 旋转(WY),Z 旋转(WZ),尺度变化(DM)。
也可以使用三参数,即X 平移,Y 平移,Z 平移,而将X 旋转,Y 旋转,Z 旋转,尺度变化面DM视为0。
选择目标坐标系,西安80、北京54、CGCS2000均分为3度带及6度带两种分度带,且分为ZONE(带号)及CM(子午线)两种坐标系。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
AUTOCAD用于墨卡托投影到高斯克吕格投影的变换理论和方法.根据不同的需要,地图镧圈中常常采用不同的投影方式:如地形图采用高斯一克吕格投影,海图通常采用墨卡托投影.由于地图数学基础不同,不同投影方式的资料难以直接转绘,拼接.长期以来?投影变换都是采用照相拼贴.膜片怯,纠正仪转绘等方法来达到投影变换的目的.从理论上分析?这种变换是局部区域点间的模拟坐标变换?无法保证及估算点的变换精度.而且手工方法,效率很低.海岛面积造算采用1:1万地形图作为量算工作底图?其中海岛滩地面积定义为:零米线等深线与海岸绞(平均高潮位)所包围的面积.而采用的资料中,l:1万地形图中没有表示零米线,必须从海图转绘.海图资料由于采用墨卡托,高斯,平面等几种不同的投影方式?且比倒尺,分幅范围与地形图不同,如果采用手工转换方法,则不仅需花费大量的人力,物力,而且工作周期较长?精度也不能满足要求.采用计算机数据处理?可E』圆满解决地图投影变换问题.逐点解析计算?理论上排除了投影转换的误差.灵活的数据处理功能,大大减少了工作量,输出形式的多样化能满足不同的制图需要.本文结合××省海岛位置?面积,岸线长度量算课题中投影变换软件的编制,介绍如何利用计算机辅助设计软件AUTOCAD实现投影变换的自动化.=,■卡托投辱,膏斯一克且格投嚣的计算公式1_墨卡托投影的计算公式.正解X=r.lnU;Y—r0l(1)式中:U~tg(45’+B/2)×[(1一e$inB)I(1+esinB)】’ro~0CO$B./Q--e.sinBo),’丑.反解L=y/r.(2)B=rp+BJsin2+丑.sin4+B?sin6式中:rp=2arctg(e)一=/2ro=N0CO$BDN.=a/Q—e.sinBo)q=x/r0B2=9.38560696x19一’B.=9.65698449×19一’B.26.17492862×i0一e一2.7182818459丑.基准纬度2.高斯一克吕格投影的计算公式=x0+(N/2)sinBcos日工’+(N/24)sinBcosB(5一f+0+4’)L’+(N/72O)sinBcos日(6l一58f’+-r’)L’Y=Ncos丑L+(N/6)eos日(1一.+”)L+(N/129)cosB(5一l8f+-r’+14”‘一56r}f)L式中:Xo=口(1一e.)(Aarc丑一日/2sin2B +c/4si~4B-D/6sln6B)为平行圜所截的中央经线弧长.;L,丑为投影点的羟纬度;掺,彩一纪报墨通测蹬通报1994年亲2期=上一L,,L.为投影带中央经线的经度;At=a/C1一e’sln.B).为卵酉曲率半径;口8.COS日;f=tgB克拉索夫斯基椭球元素为:口=6378245m:6—6366863.01877m:g;=0.006693421623;8=O.006Z38625416;一1.00505I7i39:暑0.00506237764:C=O.00001062461;D一0.00000002081软件采用间接方法实现投影变换,即根据海圉图纸坐标?由(2)式反解经纬度L再根据(3)式计算高斯一克吕格投影坐标.三,程序设计思想程序设计基于数据输八,数据处理,数据输出三大模块.如何取得良好的操作界面(如图形编辑)及最小的输八工作量,保证变换的犄度是设计的基本出发点.AuTOCAD作为美国AUTODESK公司推出的专用计算机辅助设计图形软件包,具有功能强大的图形输入,编辑,输出功能?近来已广泛应用子机械,建筑,规划设计等各个方面.但要解决地图投影变换问题,必须解决以下三个问题:1.图纸不均匀伸缩变形改正AUTOCAD图纸输入采用二个已知点定位定向公井:X=Rz(xCOS日一ysln口)l,=Ry(xsia日~ycos口)AUTOCAD图纸输八程序中设定Rx=Ry即,Y方向的伸缩率相等.显然,由于图纸纸纹方向的影响,,l,方向的伸缩变形是不可能一致的,如果直接用上式公式计算必然产生较大的扭曲,即系统误差.因此,在精度要求较高的投影变换中,必须考虑对投影的影响.经精变检测试验证实,图纸伸缩是投影误差的主要来源之一.2.投影变换计算AUTOCAD是一十图形处理软件包,虽提供AUTOLISP编程语言,但缺乏数据AD/TABLET程序驱动.AuT0cAD数字化板配置完成后,即可键八TABLET命令,这时要求数字化两个不同位甓的定向点(对角点)并从键盘输A相应的理论坐标(图纸坐标系).蓦1994年第2期澍绘通报29由于海图采用矩形分幅,图纸理论尺寸Ⅱ,b已知,即可假设左下角图廓点的坐标为(o,o),右上党的坐标为(Ⅱ,6).定向完成后,建立了数字化扳坐标系与图纸坐标系的转换关系依次用点方茸数字化四个图廓点,作为定向改正的原始鼓据诲圈比例尺一般较小,因此零米线在图【l扛率变化很大,如采用点方式逐点跟踪,则采集量大,密度也难以控制,跟踪精度不能保证AUTOCAD的自动跟踪方井(SKETCH)提供了一种便利的输八方,实际使用时设定采样间隔,计葬机就自动从辅人的坐标流中抽取采样点,如跟踪速度太快则发出嘟嘟声提醒放慢速度.实际数字化时两种方式同时采用,主要取决亍曲线的形状,完成整幅图数字化后进行局部放大,对照图面检查校桉,如有错误时则编辑改正,最后存八磁盘1.数据处理ACAD图形数据库是以一种非常紧凑的方式存储,一般用户难以直接读取,另外安装在不同机器上的ACAD可能采用不同的内部数据格才.ACAD提供了一个ASC码的”图形交换文件”以便供其它高级语言调用,该命令是在ACAD/CO—MMAND命令提示符下键人DxFOUT生成的.其结构如下:标题段表段块段实体段文件结束段每个段由多个组组成,每个蛆占tDXF文件的两行,第一行是组代码,第二行是组值,除实体段外?其它段均为一些描述性信息,可以忽略.以下给出一个很简单的图形(--条折线)的?DXF文件形式(gO体段部分)程序编制就是提取实体段的坐标信息,见程序框图2.2.图纸变形改正程序规定数组D(,y)I=1,2,3,4存放四个海图图廓点的数字化仪坐标,根据已知的理论坐标值(O,0),(0,5),Ca,6),Ca,0),用六参数仿射变换方程计算图纸变形改正系数Xffiax+by+cY~dx+e,v+fSECTION块段2ENTITIES实体段LINE8102.748383207.120t31300.01l4.264623217.dO30263100LINE8k—k+1lO4264623207.403026300.0115.857434217.428717310.0ENDsEc块段结束0EOF文件结束插入线段起点信息图2利用最小二乘法组成法方程解算系数,将数组D CX,y)所有坐标均换算成变形改正后的正确的海图坐标系坐标值.3,投影变换计算测绘通报1994年第用投影变换公式(2)根据海图坐标系的坐标值,,可计算出该点的地理坐标(凸L),根据(3)式计算出高斯坐标,对坐标数组每个点逐个计算并全部换算成高斯坐标.由于每幅海图坐标数据量高选上万个以上,编制程序耐采用数姐覆盖(边输入,边处理,边输出)的动态处理方法,可大大减少计算机存储空间并突破了计算机内存的限制.4.写入?DF文件ACAD可以输出-DXF文件,也可以滨A标准的-DXF文件,不管是AcAD文件本身输出的或由其它程序语言形成甚至用文本编辑产生的.只要其格封符合标准.利用ACAD驱动绘图仪输出,必须形成ACAD内部.DWGf绘图文件),ACAD的D2FIN是专门用以转换?DF成-DWG文件的.投影变换后的坐标保留在数组内,把每个坐标写A-DXF文件,实际上为读人?DXF文件的逝过程,编制中的主要嚼题是确定线段的起始点坐标以彤成正确的图形.对于分跨两个投影带的海图,剧分别计算相应的投影坐标.5.躅幅拼接和公里网迭加前已提厦每幅海图落幅不规则,比倒尺也不统一对每幅海图投影变换后,要进行接边.方法是因每幅海图已形成DXF文件.可在AcAD环境下,用DXFIN逐幅输A,编辑,修改拼接后形成同一投影带内整个区域图幅公里网,图号图廓癌是投影转绘必须的定向元素(输出在图纸b与l:1万地形图套绘)本次利用BASIC语言,编制一千定向元素绘图文件生成程序(见图3).定向元可绘图文件定义为单独的一图层,覆盖在已生成的零米臻区域图上.通过绘图仪输出6.图形输出ACAD可驱动各类绘翩庄,在完成对所用绘图均配置及y方向比侧校正后,用鼠栝器按需要的图廓线遥幅选取,并按相应比例尺输出图纸.五,精度揎澍为保证程序运行的正确性及评估转绘的精度,进行精度检测是十分必要的资料:海图:N13421比例尺:1:350O0基准纬度:30.4000设备:AST3s6SX/16计算机,CALC0MP01480数字化仪图32期AUT0CAD2.62软件及AUTO—cAD接口程序,数据处理程序.方珐:1,用数字化仪在诲圈上采取经纬线交点坐标,经数据处理,直接输出经纬线交点在高斯投影(3度带)上的高斯坐标.2.根据经纬度用公计算高斯坐标(理论值).3.图纸变形改正前后投影精度比较.经52十交点坐标计算中误差:M一28.2m图tO.80ramM:一8.9m图上O.25ramM,工4.2m图上0.41ramM:=8,4m图上0.24ramM.rO.90ramM:,0.35ram经图纸变形改正后,基本上消除了坐标的系统误差,据文献[2]海图成图误差为O.36m妞,固此可以认为投影转绘误差小于海图零米线成图误差,即转绘引起的滩地面积误差可以忽略不计.六.结柬语xX省岛屿数量多,海岛面积滩地面积量算工作量大,情况复杂,其中零米线转绘工作直接影响滩地量算的精度,覆盖岛屿有各种比例尺海图85幅,1:1 万面积量算工作底图435幅,分布在两个投影带内, 可以想象,用一般方法是难胜任的.(下转第9页)l994年第2期测绘通报g性.如果一个估计方法,在实际情况与假定模型相差较小时其性能变化也较小,则称它是稳健的,从实用观点看,应该说稳健性主要是一个相比较而存在的概念.不存在什么”最稳健”的估计方法.但是给了两个处理同一问题的估计方法,可蹦从某种角度去考察谁的稳健性更好一些.稳健估计方法很多,基本的稳健估计类有三种,极大似然估计(M估计),顺序统计量线性组合型估计(L估计)和秩检验型估计(R估计).目前,只有M估计较有实用价值,也较易实施.M估计不是一个确定的估计,而是指一娄估计,一般可分为选权迭代法和P一范数最小法.选权迭代怯,一般形宣为,(V)=VP(V)V=mi~1:一工(53式中,P()是残差的某种函数,为简单起见,通常取P()为对角阵.选取不同的P()就代表一种选权选代法.P()的元素可以是残差.的函数,也可以是标准化残差的函型其形式可以是幂函数, 也可能是指敉函数.当P()=P为一对角常数阵时,则选权迭代法变为经典平差法.范数最小法,一般形为0VII=m,l≤P<21V一且一工JL,式中P的最有利范围有的文献认为在1.0-1.5之间或1.2-1.5之间当P=1时,就是残差绝对值最小和法,即,一范数最小法,当P=2时,就是经典最小二乘法.十=,近代瓣■平差的特点近代侧量平差的内容非常丰富,其主要特点是,观测值概念广义化了,从处理随机独立的观删数据. 发展到可以处理随机相关的观’删数据;扩展了经典测量平差的数学模型,从满秩平差问题,发展到降秩平差问题,从仅处理随机变量,发展到一并处理随机过程,从侧重于平差函数模型的研究,发展到也重视随机模型的研究,从不顾及模型误差.发展到颇及模型误差;针对最小二乘估计的局限性揖出了有偏估计和稳健估计.t1]阵希孺,l987.[2]王橙桂1987.主要参考文献王橙挂:近代回归分析,安徽教育出版社线性摸型的理论及其应用安教教育出版杼t3]A.布耶哈马着.魏子卿译:误差理论和广义逆矩阵测绘出版社,1980.t4E.M.MiKhail等着,唐昌先,邹笃酵译;观铡与最小二乘法.铡绘出版社.1984.【5P.Melssl着.同济大学测量系译:最小二乘平差近代方i击,稻结出版社.1985.t6]H.Morltz着.丘其宪等译:最小二乘拟台推估怯.飒} 绘出版廿.1980.f1]D.E.Wells等着.曾启雄译:最小二乘法.飒I绘出版社.1980.£8]刘大杰于正林:广义平差原理.上,下册.武汉铡绘学院1985.:0】崔希璋等:测量平差的现状和发展,莉量平差理论厦其应用学术讨论会论文.1985.[101李德仁:误差处理和可靠性理论.测绘出版社.1988. [¨黄维彬:近代平差理论及其应用,解放军出版社.1992.[12]黄维彬:最小二乘滤波,推估和配置.1981.[1钉黄维椎:近1七平差的现状和展望.1991.[1盯黄维彬;参数具有先验统计性质的平差方法.1989.[15]黄维彬:测量平差的当代进展.1989.‘‘‘‘‘qqqqqqq’’’’’’q’_q’’’_’’’’’’’’’_’’’’’’_’’_(上接第3O页)~经实际使用,证明该程序方法台理,手段先进,太大提高了工作效率,数据栗集灵括,便利,操作简单,可输出任意比俩尺的图幅图纸.程序适用性强.随着计算机,人工智能技术的不断发展,地理信息系统的理论和技术将成为经济建设,自然灾害预防,资源调查等有力工具,地理信息系统的基本数据一空间数据主要来自地髟图,航空像片,遥感图像等介质如何输八计算机中形成一个统一的坐标系是建立地理数据库的关键问题,其中投影变换是数据处理的一十必不可少的环节,本文的目的也在于抛砖引玉,供同行参考参考文献1.在电子计算机辅助制图情况下地图投影变换的研究.《地图投影论文集》.测绘出版社,lgB3年.2.新编大比例尺航海母制图精度分析.。