机械控制理论.答案共38页文档
机械控制工程课后习题解答
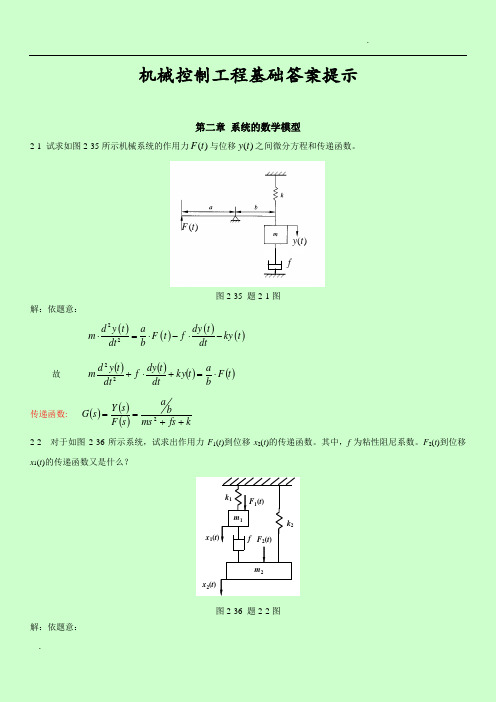
机械控制工程基础答案提示第二章 系统的数学模型2-1 试求如图2-35所示机械系统的作用力)(t F 与位移)(t y 之间微分方程和传递函数。
)(t F )(t y f图2-35 题2-1图解:依题意:()()()()22d y t dy t a m F t f ky t dt b dt⋅=⋅-⋅- 故 ()()()()t F b at ky dt t dy f dt t y d m⋅=+⋅+22 传递函数: ()()()kfs ms b as F s Y s G ++==22-2 对于如图2-36所示系统,试求出作用力F 1(t )到位移x 2(t )的传递函数。
其中,f 为粘性阻尼系数。
F 2(t )到位移x 1(t )的传递函数又是什么?m 2m 1k 1 f k 2F 1(t )F 2(t ) x 2(t )x 1(t )图2-36 题2-2图解:依题意:对1m : ()()()()212121111dt t x d m dt t dx dtt dx f t x k F =⎥⎦⎤⎢⎣⎡--- 对两边拉氏变换:()()()[]()s X s m s sX s sX f x k s F 12121111=--- ①对2m : ()()()()()222222212dt t x d m t x k dt t dx dt t dx f t F =-⎥⎦⎤⎢⎣⎡-+ 对两边拉氏变换:()()()[]()()s X s m s x k s sx s sx f s F 22222212=--+ ②故: ()()()()()()()()⎩⎨⎧=+++-=-++S F s x k fs s m s fsx s F s fsx s x k fs s m 222221121121 故得:()()()()()()()()()()()()()()⎪⎪⎩⎪⎪⎨⎧-+++++++=-+++++++⋅=22221212212122222121222211fs k fs s m k fs s m k fs s m s F s fsF s x fs k fs s m k fs s m s fsF k fs s m s F s x 故求()t F 1到()t x 2的传递函数 令:()02=s F()()()()()()()()()2122211122432121212211212x s fsG s F s m s fs k m s fs k fs fsm m s f m m s m k m k s f k k s k k ==++++-=+++++++求()t F 2到()t x 1的传递函数 令:()01=s F()()()()()()()()()1122221122432121212211212x s fsG s F s m s fs k m s fs k fs fsm m s f m m s m k m k s f k k s k k ==++++-=+++++++2-3 试求图2-37所示无源网络传递函数。
机械工程控制基础考试题及答案

机械工程控制基础考试题及答案机械工程控制基础是机械工程专业中非常重要的一个方面,掌握该领域的基本知识对机械工程师的工作至关重要。
在进行机械工程控制基础考试时,掌握学科基础知识与技巧应是首要准备,同样重要的还有解题能力。
因此,我们在此提供几道机械工程控制基础考试题及答案供大家参考。
1. 下列哪些控制系统是模糊控制系统?A. 摆线刀切削力控制系统B. 滤波器控制系统C. 股票市场交易系统D. 空调控制系统正确答案:A、C、D。
模糊控制系统是一种以模糊逻辑为基础,实现对复杂非线性系统的控制的一种方法。
股票市场交易系统属于复杂非线性系统,可以用模糊控制系统进行控制。
2. 控制系统的传递函数为:G(s) = 1 / [(s + 1)(s + 3)],求其单位阶跃响应。
正确答案:G(s)的单位阶跃响应为:Y(s) = [1 / (s + 1)] - [1 / (s + 3)],通过部分分式分解得到Y(t) = 1/2 - 1/2e^(-2t)。
因此,该系统的单位阶跃响应为Y(t) = 1/2 - 1/2e^(-2t)。
3. 下列哪个量不是PID控制器中的一个参数?A. 比例系数B. 积分时间C. 微分时间D. 控制信号正确答案:D。
PID控制器包括比例控制、积分控制和微分控制三个部分,分别由比例系数、积分时间和微分时间控制。
4. 一个反馈控制系统的开环传递函数为:G(s) = 1 / (s -1),闭环传递函数为:H(s) = G(s) / (1 + G(s)), 求该控制系统的稳态误差。
正确答案:该控制系统的稳态误差为0。
5. 已知一个控制系统稳定,其零极点分布情况如下:零点为s= -1, -2;极点为s = -3, -4,判断该系统稳定类型。
正确答案:由于该控制系统的极点均位于左半平面,因此该控制系统稳定。
6. 下列哪种控制模式比例带宽越大,相对带宽越小?A. 位置控制模式B. 速度控制模式C. 加速度控制模式D. 跟踪控制模式正确答案:B。
完整版机械工程控制课后习题答案 星期一考试用得上
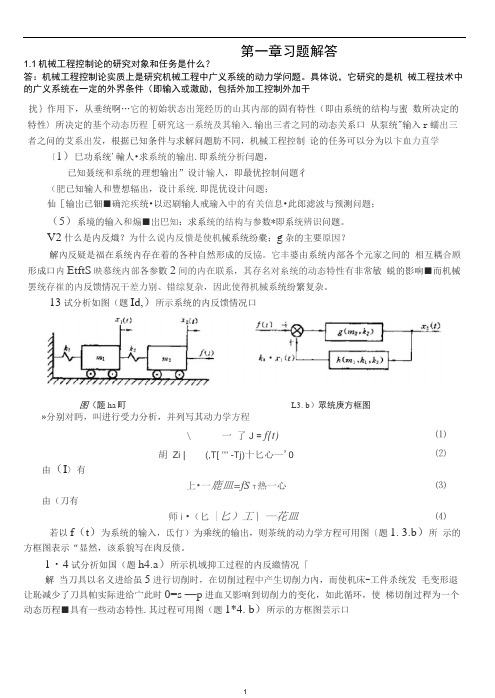
第一章习题解答1.1机械工程控制论的研究对象和任务是什么?答:机械工程控制论实质上是研究机械工程中广义系统的动力学问题。
具体说,它研究的是机 械工程技术中的广义系统在一定的外界条件(即输入或激励,包括外加工控制外加干扰}作用下,从垂统啊…它的初始状态出笼经历的山其内部的固有特性(即由系统的结构与蜜 数所决定的特性〉所决定的基个动态历程[研究这一系统及其输入.输出三者之同的动态关系口 从泵统"输入r 蠕出三者之问的艾系出发,根据已知条件与求解问题肪不同,机械工程控制 论的任务可以分为以卞血力直学〔1)巳功系统'輸人•求系统的输出.即系统分析闫题,已知聂统和系统的理想输出”设计输人,即最优控制问題彳(肥已知输人和豐想辐出,设计系统.即毘优设计问题;仙[输岀已钿■确沱疾统•以迟刷输人戒瑜入中的有关信息•此郎滤波与预测问题;(5)系境的输入和煽■岀巴知:求系统的结构与参数*即系统辨识问题。
V2什么是内反熾?为什么说内反愦是使机械系统纷橐;g 杂的主要原因?解內反疑是福在系统内存在着的各种自然形成的反協。
它丰婆由系统内部各个元家之间的 相互耦合顾形成口内EtftS 映慕统内部各参數2间的内在联系,其存名对糸统的动态特性有非常敏 蜕的影响■而机械罢统存崔的内反馈情况干差力别、错综复杂,因此使得机械系统纷繁复杂。
13试分析如图(题Id,)所示系统的内反馈情况口图(题ha 町L3. b )眾统庚方框图»分别对眄,叫进行受力分析,并列写其动力学方程⑴ ⑵\一 了J = f{t) 胡 Zi |(,T[ "" -Tj)十匕心—'0 由(I〉有上•一鹿皿=fS T 热一心 ⑶由(刀有师i •(匕 |匕)工\ —花皿 ⑷若以f (t )为系统的输入,氐仃)为乘统的输出,则茶统的动力学方程可用图〔题1. 3.b )所 示的方框图表示“显然,该系貌写在肉反债。
1・4试分祈如国(题h4.a )所示机域抑工过程的内反繳情况「解 当刀具以名义进给虽5进行切削时,在切削过程中产生切削力內,而使机床-工件杀统发 毛变形退让恥减少了刀具帕实际进给宀此时0=s —p 进血又影响到切削力的变化,如此循环,使 梯切削过稈为一个动态历程■具有一些动态特性.其过程可用图(题1*4. b )所示的方框图芸示口b5什么是外反馈?为什么要进行反馈控哉?SE外反馈杲指人们为了达到f定的且的,宥意加人的反馈。
机械控制工程基础复习题及答案

机械控制工程基础复习题11、 选择填空(30分,每小题2分)(下列各题均给出数个答案,但只有一个是正确的,请将正确答案的序号写在空白 处)1.1在下列典型环节中,属于振荡环节的是 。
(A) 101.010)(2++=s s s G (B) 101.01)(2++=s s s G (C) 101)(+=s s G 1.2系统的传递函数定义为在零初始条件下输出量的Laplace 变换与输入量的Laplace变换之比,其表达式 。
(A )与输入量和输出量二者有关(B )不仅与输入量和输出量二者有关,还与系统的结构和参数有关 (C )只与系统的结构和参数有关,与输入量和输出量二者无关 1.3系统峰值时间p t 满足 。
(A )0)(=pp o dt t dx (B ))()(∞=o p o x t x (C ))()()(∞⋅∆≤∞-o o p o x x t x其中,)(t x o 为系统的单位阶跃响应。
1.4开环传递函数为G (s )的单位反馈系统的静态速度误差系数的计算式为 。
(A) )(lim 0s G K s v →= (B) )(lim 2s G s K s v →=(C) )(lim 0s sG K s v →=1.5最大百分比超调量(%)p M 的定义式为 。
(A ))()(max (%)∞-=o o p x t x M (B) %100)()()(max (%)∞∞-=o o o p x x t x M(C ))()(max(%)t x t x M i o p = 其中,)(t x i 为系统的输入量,)(t x o 为系统的单位阶跃响应,)(max t x o 为)(t x o 的最大值。
1.6给同一系统分别输入)sin()(11t R t x i ω=和)sin()(2t R t x r i ω=这两种信号(其中,r ω是系统的谐振频率,1ω是系统正常工作频率范围内的任一频率),设它们对应的稳态输出分别为)sin()(1111ϕω+=t C t x o 和)sin()(222ϕω+=t C t x r o ,则 成立。
(完整版)机械控制工程基础习题及答案考试要点

图解5-21
临界稳定时
由Bode图
法(二)
;
令 ,则
(1)
又令
代入(1)得:
解出: (舍去)。
故当 1/秒, 时,系统临界稳定。
5-24某最小相角系统的开环对数幅频特性如题5-24图所示。要求
(1)写出系统开环传递函数;
(2)利用相角裕度判断系统的稳定性;
(3)将其对数幅频特性向右平移十倍频程,试讨论对系统性能的影响。
可求得 和 的值。
若实测结果是:加10伏电压可得每分钟1200转的稳态转速,而达到该值50%的时间为1.2秒,试求电机传递函数。
[提示:注意 = ,其中 ,单位是弧度/秒]
解依题意有:
(伏)
(弧度/秒) (1)
(弧度/秒) (2)
设系统传递函数
应有 (3)
由式(2),(3)
得
解出 (4)
将式(4)代入式(3)得
比较系数有 联立求解得
因此有
3-9电子心律起博器心率控制系统结构图如题3-9图所示,其中模仿心脏的传递函数相当于一纯积分环节,要求:
(1)若 =0.5对应最佳响应,问起博器增益 应取多大?
(2)若期望心速为60次/分钟,并突然接通起博器,问1秒钟后实际心速为多少?瞬时最大心速多大?
解依题,系统传递函数为
(4)
画Bode图得:
系统不稳定。
5-20设单位反馈控制系统的开环传递函数,试确定相角裕度为45°时的α值.
解
开环幅相曲线如图所示。以原点为圆心作单位圆,在A点:
即: (1)
要求相位裕度
即:
(2)
联立求解(1)、(2)两式得: , 。
机械控制工程复习与考试题(含答案)

机械控制⼯程复习与考试题(含答案)机械控制⼯程复习⼀、填空题1.线性控制系统最重要的特性是可以应⽤叠加原理,⽽⾮线性控制系统则不能。
2.反馈控制系统是根据输⼊量和反馈量的偏差进⾏调节的控制系统。
3.根据⾃动控制系统是否设有反馈环节来分类,控制系统可分为__开环_控制系统、_闭环__控制系统。
4.根据系统输⼊量变化的规律,控制系统可分为恒值控制系统、随动控制系统和程序控制系统。
5.如果在系统中只有离散信号⽽没有连续信号,则称此系统为离散(数字)控制系统,其输⼊、输出关系常⽤差分⽅程来描述。
6.根据控制系统元件的特性,控制系统可分为__线性__控制系统、⾮线性_控制系统。
7.线性控制系统其输出量与输⼊量间的关系可以⽤线性微分⽅程来描述。
8.对于⼀个⾃动控制系统的性能要求可以概括为三个⽅⾯:稳定性、快速性和准确性。
9.在控制⼯程基础课程中描述系统的数学模型有微分⽅程、传递函数等。
10.传递函数的定义是对于线性定常系统,在零初始条件下,系统输出量的拉⽒变换与输⼊量的拉⽒变换之⽐。
11.传递函数的组成与输⼊、输出信号⽆关,仅仅决定于系统本⾝的结构和参数,并且只适于零初始条件下的线性定常系统。
12.瞬态响应是系统受到外加作⽤激励后,从初始状态到最终稳定状态的响应过程。
13.脉冲信号可以⽤来反映系统的抗冲击能⼒。
14.单位斜坡函数t的拉⽒变换为1/s215.单位阶跃信号的拉⽒变换是1/s。
16.在单位斜坡输⼊信号作⽤下,0型系统的稳态误差ess=19.决定⼆阶系统动态性能的两个重要参数是阻尼系数ξ和⽆阻尼固有频率ωn。
22.⼆阶系统的阻尼⽐ξ为0时,响应曲线为等幅振荡。
23.系统输出量的实际值与输出量的期望值之间的偏差称为误差。
24.系统的稳态误差与输⼊信号的形式及系统的结构和参数或系统的开环传递函数有关。
25.分析稳态误差时,将系统分为0型系统、I型系统、II型系统…,这是按开环传递函数的积分环节数来分类的。
机械工程控制基础 答案

1.1 工程控制理论的研究对象和任务是什么?答:机械工程控制论的研究对象及任务:工程控制论实质是研究工程技术中广义系统的动力学问题。
具体说,它研究的是工程技术中的广义系统在一定的外界条件作用下,从系统的一定初始条件出发,所经历的由其内部的固有特性所决定的整个动态历程;研究这一系统及其输入、输出三者之间的关系。
1.2 组成典型闭环控制系统的主要环节有哪些?它们各起到什么作用?答:典型闭环控制系统的主要环节:给定环节、测量环节、比较环节、放大及运算环节、执行环节。
作用:给定环节:给出与系统输出量希望值相对应的系统输入量。
测量环节:测量系统输出量的实际值,并把输出量的量纲转化与输入量相同。
比较环节:比较系统的输入量和反馈信号,并给出两者之间的偏差。
放大环节:对微弱的偏差信号进行放大和变换,使之具有足够的幅值和功率,以适应执行元件动作的要求。
执行环节:根据放大后的偏差信号产生控制、动作,操作系统的输出量,使之按照输入量的变化规律而变化。
1.3 自动控制系统按照输出变化规律如何分类?按照反馈规律分为哪几类答:按输出变化规律分类:自动调节环节、随动系统、程序控制系统。
按反馈情况分类:开环系统、闭环系统、半闭环系统。
1.4 什么是反馈控制?日常生活种有许多闭环和开环系统,请举例说明。
答:反馈控制是将系统的输出信号通过一定的检测元件变送返回到系统的输入端,并和系统的输入信号进行比较的过程。
举例:开环系统:洗衣机、电烤箱、交通红绿灯和简易数控机床。
闭环系统:数控机床的进给系统。
1.5 分析比较开环系统与闭环系统的特征、优缺点和应用场合的不同之处。
答:开环系统:信号单向传递;系统输出量对输入没有影响的系统。
特征:作用信号单向传递。
优点:简单、调整方便、成本低、不会震荡。
系统总能稳定工作。
缺点:开环控制系统精度不高,抗干扰能力差。
场合:在一些对控制精度要求不高、扰动作用不大的场合。
闭环系统:信号形成闭环回路;系统末端输出量对输入有影响的系统。
机械控制工程基础练习题考试题及其答案

1、简答题1、控制系统的基本要求。
1)、简述闭环控制系统的组成。
测量元件,给定元件,比较元件,放大元件,执行元件,校正元件2)、非最小相位系统有何特点,与最小相位系统的区别是什么?第二题在复平面【s】右半平面没有极点和零点的传递函数称为最小相位传递函数,反之,在【s】右半平面有极点和零点的传递函数称为非最小相位传递函数。
具有最小相位传递函数的系统统称为最小相位系统,反之,具有非最小相位传递函数的系统称为最小相位系统3)、简述系统串联滞后校正网络的校正原理。
此滞后校正环节是一个低通滤波器,因为当频率高于1/T时,增益全部下降20lgb(db),而相位减小不多。
如果把这段频率范围的增益提高到原来的增益直,当然低频段的增益就提高了。
4)、简述系统超前校正网络的校正原理在对数幅频特性曲线上有20db/dec段存在,故加大了系统的剪切频率Wc、谐振频率Wr与截止频率Wb,其结果是加大了系统的带宽,加快了系统的响应速度;又由于相位超前,还可能加大相位裕度,结果是增加了系统相位稳定性。
5)、减小或消除系统稳态误差的措施主要有哪些?1:增大系统开环增益或扰动之前系统的前向通道增益2:在系统的前向通道或主反馈通道设置串联积分环节3:采用串级控制抑制内回路扰动。
6)、简要说明比例积分微分PID控制规律中P、I和D的作用(1)比例系数Kp直接决定控制作用的强弱,加大Kp可以减小系统的稳定误差,提高系统的动态响应速度,但Kp过大会使动态质量变坏,引起被控制量震荡甚至导致闭环系统不稳定(2)在比例的调节的基础上加上积分控制可以消除系统的稳态误差,因为只要存在偏差,它的积分所产生的控制量总是用来消除稳态误差,直到积分的直为零,控制作用才停止(3)微分的控制作用是跟偏差的变化速度有关。
2.已知控制系统的结构图如下图所示,求:(1)当不存在速度反馈)0(=a时,试确定单位阶跃输入动态响应过程的rt,st和%σ。
(1)a=0时,()()42G ss s=+,()2424ss sΦ=++,所以0.5,2nζω== rt=,pt=,%eσ=(2)确定0.7ζ=时的速度反馈常数a值,并确定ttr=)(时系统的稳态误差sse。