基于DSP的开关磁阻电机控制系统设计
基于DSP的开关磁阻电机调速系统的软硬件设计方案

电 力 工 程
基于DP 开关磁阻电 S的 机调速系统的 软硬件设计方案
章 余 思
( 州 电业局 , 建 福 州 30 0 ) 福 福 5 0 0
摘 要 : 文介 绍 了以 T S 2 F 4 7 片 为核 心的 高性 能 数 字化 S D控 制 器 的设 计 , 出 了硬件 电路 设 计 和软 件设 计 策略 。 本 M 30 20 芯 R 给 关键 词 : 字信 号 处理 器 ; 关磁 阻电机 调速 系统 ; M 3 0 2 0 芯 片 数 开 T S 2 F4 7
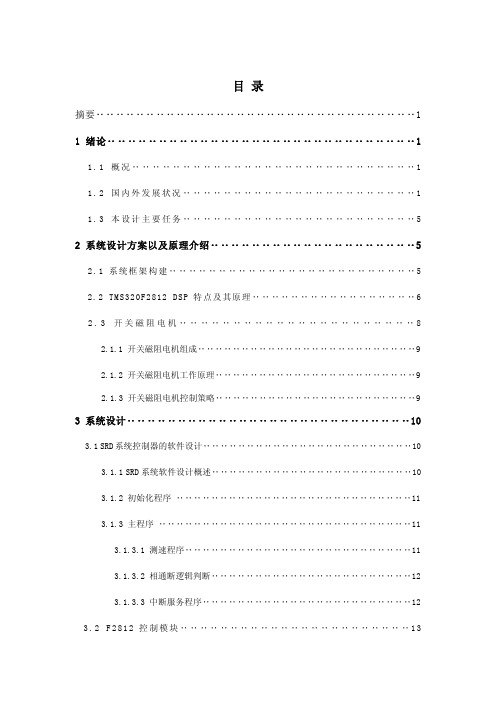
1引 言 组也 构 成 回路 , B相 电流 增 大 , 使 中性点 电位 必 然增 高 , 使 A相续 促 2 O多年 来 ,开 关 磁 阻 电机 的研 究在 国 内外都 取 得 了很 大 的发 流迅 速 衰减 , 行换 相 。 强 紧接 着关 断 v , 3 开通 V , C D相 导通 , 4则 , 依 展 , 且 作为 一 种 新 型调 速 驱 动 系 统 , 而 它兼 有 直 流 传 动 和 普通 交 流 次循 环 导通 , 电机就 连续 运行 起 来 。 传 动 的优 点 , 已经 广 泛 应 用 于 工 业 、 用 电 器 、 家 电动 车 辆 等诸 多 领 2 主 开关 驱动 电路 的设 计 . 2 域 。 随 着微 电子 技术 的迅速 发 展 和数 字信 号处 理 理论 与技 术 的不 伴 本 系统 采 用 的驱 动 电路 模 块 是 E B 4 ,该 电路 的 优 点是 驱 动 X 8I 抗 速 保 可 断完善 ,数字信号处理器作 为电子信息领域的新型高科技产品, 更 电路 集 成 化 , 干 扰 能 力 强 , 度 较 高 , 护 功 能 较 完 善 , 实 现 为 电机 系 统 的数 字 化控 制 注 入 了新 的生 机 。 随着 D P在 电机 控 制 I B S G T的最 优驱 动 。 领域 的应用 ,基 于 D P的开 关 磁 阻 电机 调 速 系统 的研 究 已 如火 如 S I B、 驱 动 电路 的要 求注 意 以下几 个 问题 : G q对 荼。 ( 1 态驱 动 能 力强 。 为 I B 栅 极 提供 具 有 陡峭 前后 沿 的驱 )动 能 GT 2 硬件设 计 方案 动脉 冲。IB G T的开关 速度 与 其栅 极控 制 信号 的 变化 速 度密 切相 关 。 开 关磁 阻 电机调 速 系统 是 由 S M、 率 变换 电路 、S 控 制 器 、 IB R 功 DP G T的栅 极 电压 源 特性 呈 非线 性 电 容性 质 ,用小 内阻 的 驱动 源 对 位 置传 感器 等组 成 。本 系统 的硬件 框 图如 图 : 栅极 电容 充放 电 , 以保证 栅 极 控制 电压有 足 够 陡 的前后 沿 , I B 使 GT 的 开关 损耗 尽量 小 。 ( 2 向 IB )能 G T提供 适 当 的正 向栅 压 。 ( 3 向 IB )能 G T提 供 足 够 的反 向栅 压 。在 IB G T关 断期 间 , 由于 电路 中其它 部分 工 作 ,会 在栅 极 电路 中产 生一 些 高频 振荡 信 号 , 这 些信 号 轻则 会使 本 该截 止 的 I B G T处于 微通 状 态 , 加 管 子 的功耗 , 增 重 则将 使 逆 变 电路 处 于 短 路直 通 状 态 , 因此 , 好 给 应处 于截 止 状 最 态 的 IB G T加 反 向栅 压 f 一 般 为 :V lV , IB 幅值 5 ~ 5 ) G T在 栅 极 出现 使 开关 噪 声时 仍能 可靠 截 止 。 图 1开 关磁 阻电机 调速 系统框 图 ( 4 )有 足够 的输 入 、 出 电隔 离能 力 。驱 动 器具 有 电 隔离 能力 , 输 21功率 变换 器 的设 计 . 可 以保 证设 备 的正 常T 作 , 是这 种 隔离 不 应影 响 驱 动信 号 的正 常 但 功 率变 换 主 电路 的结构 型式 很 多 , 不 对 称半 桥 型 、 有 双绕 组 型 、 传输 。 电容裂 相 型 、 型 、 H 电容转 储 型等 。 ( 5 )具 有 栅压 限幅 电路 , 护 栅极 不 被击 穿 。I B 保 G T栅 极极 限电 可 以用 来 构成 S D功 率变 换 器 的 主开 关 器件 主要 有 普通 晶闸 压 为+ 0 驱 动信 号超 出此范 围就 可 能破 坏栅 极 。 R _ V, 2 管 、 功 率 晶 体 管 (T )可 关 断 晶 闸管 (T )MO 场 效 应 晶 体 管 大 G R、 GO、 S ( 6 )理想 的驱动 电路 要 求输 入 、 出信 号传 输无 延 时 。 一方 面 输 这 f SE ) MO F T和绝 缘栅 双 极 晶体 管( B ) I T。电动机 功 率变 换 器主 开关 器 能够 减 少系 统 响应滞 后 , G 另一 方 面 能提 高保 护 的快速 性 。 件 的选 择 与 电 动机 的功 率 等级 、 电 电压 、 值 电 流 、 本 等有 关 ; 供 峰 成 23位置 传感 器设 计 - 另 外还 与 主开关 器 件本 身 的 开关 速度 、 发难 易 、 损 耗 、 冲击 触 开关 抗 位 置检 测器 作用 是 向 D P端 口正确 提供 转子 位 置信 息 。 S 性、 耐用 性及 市 场普 及 性有关 系。 本 系统 的转 子位 置 信号 传感 器 是 由光 电 传感 元件 f 部 分) 固定 和 双 极 型 功率 晶体 管 ( T 的 开 关 频率 高 , 有 自关 断 能力 , G R) 具 在 光 电盘 ( 转部 分) 成 。 构如 图 3齿 盘上 6 间 隔 3 o 旋 构 结 , 个 0的齿槽 , 与 中 、 容量 的 S D应 用 广 泛 , 其 电压 、 流过 载 能 力差 , 受浪 涌 电机 转 子 同轴 。 电传 感 器 S 小 R 但 电 承 光 、P固定 在 电机 机壳 上 , 遮 挡传感 当齿 电流 的能力 差 , 二 次击 穿 现象 , 易保 护 。 存在 不 器 的光 路 , 敏 管处 于 截止 状 态 ; 光敏 管受 光 导 通 。电机 旋 转 时 , 光 当 0的方 可 关 断 晶 闸管 ( T 在 不 断 关 断 时要 求 相 当大 的反 向控 制 电 传感 器 输 出 3 。 波信 号 ,如 图 4表示 电机转 动 时两 个 位 置传 感 G O) 流 , 控 制实 现有 难 度 , 存 在 管 压 降 比普通 晶闸管 高 等 不足 , 关断 并 因 器输 出信号 。 此作 为 功率 电路 的开关 的应 用 并 不广 泛 。 功 率场 效 应管 M S E O F T是 一种 单 极 型的 电压控 制 器 件 ,具 有 驱 动 电路简 单 、 速 度快 、 稳 定性 好 等优 点 , 是容 量 有 限制 并 开关 热 但 S 且 比双极 型 功 率 晶体 管 通 态 压 降大 , 只适 用 于低 电压 、 功率 的开 小 关 磁 阻电机 系 统 中。 绝 缘 栅 双极 型 晶 体 管 (G T) 8 I B 是 0年代 出现 的新 型 复合 开关 器 件 , 有工 作 频率 较 高 , 具 控制 实 现 比较 简 单 , 而且 单 管 的电 压定 额 与 电流 定额 也 已经 做得 很 大 , 已经 可 以满 足 对本 装 置 功率 器 件 的要 图 3 转子 位 置信 号传 感 器结 构 图 图 4 位 置传 感 器信 号 图 求, 因此经 综 合考 虑 选用 I B G T作 为本 系 统 S D功 率 变换 器 的 主开 R 电机 速 度 的检测 主 要是 通过 检 测传 感器 输 出信 号来 实 现 的。 可 关 器件 。本 文采 用 H型 的功 率 电路 , 图 2所示 。 如 以采 用检 测 脉 冲 宽 度 、 压 转 换 或 其它 方 式 来 实 现 , 文 采用 的是 频 本 脉 冲 宽度测 速 法 。 图 4中高 电平 部 分 表示 电机转 子 转 过 3 即一 0度 周 的 11 所 需 的时 间 l 对应 的 电机 转速 为 1则 有 : /2 , 设 1 ,
基于DSP的开关磁阻电机调速系统设计与研究的开题报告
基于DSP的开关磁阻电机调速系统设计与研究的开
题报告
一、研究背景
开关磁阻电机是一类新型的磁阻式电机,具有体积小、重量轻和效率高等优点。
其转速、转矩和功率密度都比传统电机高,因此在航空航天、汽车、机器人等领域有着广泛的应用。
开关磁阻电机的调速系统是其重要组成部分,对于提高电机性能和效率至关重要。
因此,开展基于DSP的开关磁阻电机调速系统设计与研究具有重要的理论和实际意义。
二、研究内容
(一)开关磁阻电机调速技术研究
对开关磁阻电机的基本工作原理、电流控制模型和电磁特性进行研究,并综述目前多种开关磁阻电机调速技术的优缺点。
(二)DSP控制器设计
采用TI系列DSP芯片作为控制器,进行调速控制算法的实现,并设计硬件电路和PCB板布局,保证系统稳定性和可靠性。
(三)系统仿真与实验验证
利用Matlab/Simulink对系统进行仿真,并对实验结果进行分析和评价,验证系统的有效性和实际应用价值。
三、研究意义
(一)为开发高性能的开关磁阻电机提供技术支持;
(二)推动磁阻式电机应用领域的发展;
(三)拓展开关磁阻电机调速系统的研究思路;(四)为智能电机控制系统的研究提供参考。
DSP控制的开关磁阻电机调速系统的研究_图文(精)
北京交通大学硕士学位论文基于DSP控制的开关磁阻电机调速系统的研究姓名:师勇申请学位级别:硕士专业:电工理论与新技术指导教师:张晓冬;高超20071201中文摘要摘要:开关磁阻电机(SwitchedReluctanceMotor),简称SRM,因其结构简单、坚固、工作可靠、效率高、并且其构成的调速系统SRD具有运行性能和经济指标好等突出优点,在交流调速领域异军突起。
成为当代电气传动领域的热门课题之一。
但SRD无论是在理论上还是在应用上都存在着不少问题,有待于进一步的研究和完善。
本文以实现工程应用为目标,以DSP为控制核心,研究并设计了55kw三相12/8极SRM的调速系统。
本文在了解了开关磁阻电机调速系统的发展和研究现状的基础上,进一步论述了开关磁阻电机的工作过程和转矩产生的本质,针对开关磁阻电机的特点提出了切实可行的控制策略,从理论上解释了开关磁阻电机高性能的原因.在理论分析的基础上,设计了以DSP为控制核心的全数字控制系统。
本文对功率变换器的设计、驱动电路和电源电路做了详细的分析;设计了以1Ms320F240为核心的控制电路,包括位置检测电路、电流检测电路、10接口电路、存储器接口电路、故障保护电路和丰富的通讯功能电路,充分利用了DSP内部丰富的外设资源,达到了简化电路结构、提高运行可靠性的目的;控制软件的设计采用模块化编程,具有控制灵活、操作方便、容易实现复杂的控制算法等优点,在本文中详细的给出了控制算法的流程图。
本文搭建了实验装置用于验证所设计的系统的控制性能。
实验结果表明SRM在起动和各种速度稳态运行时的性能都达到了所预期的目标。
针对要求SRD转矩控制精度比较高的场合给出了一种简单、实用的工程解决方法,有效的提高了转矩控制精度,解决了转矩和电流非线性控制问题。
关键词:开关磁阻电机;DSP;硬件;软件;提高转矩精度分类号:TM352ABSTRACTABSTRACT:SwitchedReluctanceMotor(SRM),asanewforcesuddenlyrisinginACtimingdomain,hastheadvantagesofsimpleandfirm袖ructIlrc,hi曲credibilityandefficiency,andalsomakestheSRDrunningexcellentandeconomical.SoSRMisdevdopingrapi,Uyandbecoming0110ofthemostpoptopicsinthecontemporaryeraoftheelectrictrensmissi∞domain.ButSRMhasmanyproblemstobesolvedbethintheorymadinpractice.ThatmⅨlllSthatfoyerresearchandimprovementareneeded.ThispaperholdsthecontroloftheDSPcor包aimsatpracticalprojects,researchesenddesignsatimingsystemwitllthreephase,12/8-pole,and55kW.BasedonthedevelopmentendresearchstatusinquoofSRMtimingsystem,thepaperdiscussestheworkprocessandthetorque’sproducibleessenceofSRM.AviablesWategyofcontrolisputforwardaccordingtothecharacteristicsofSRM.ThepaperalsoexplainswhySRMhas∞high-poweredcharacteristicsintheory.Onthebaseofthetheoryanalysis.all-digitalcontrolsystemwimthecontroloftheDSPcoreisdesignedendtheexperimentalequipmentisbuilt.Therearedetailedanalysisonpowerconverters,drivecircuitendpowersupplycircuitinthepaper.Herethecontrolcircuitbasedonthecore:ofTMS320F240isdesigned,includingthepositiondetectivecircuit,currentdetectivecircuit,IOinterfacecircuit,memorizerinterfacecircuit,faultprotectioncircuitandluxuriantcommunicationcircuitwhichmadefulluseoftheDSP’Sabundantoutsideresources,inordertosimplifythecircuitstructureendincreasetherunningreliability.Thedesignofthecontrolsoftwareadoptedthemodularprogramming,withflexiblecontrol,easytooperateendrealizecomplexcontrolalgorithm.Thepaperalsogivesflowchartsofthecontrolalgorithmindetail.mthepaper,experimentalequipmentswe豫builtinordertoVeril.ythecontrolsystemperformance,thestartingperformanceofSRMendthepeffi肌anceofsteady-stateoperationinvariousspeeds.Theexperimentalresultsmakeitclearthattheexpectedgoalshavebeenachieved.ItgivesasimpleendpracticalprojectsolutiontotheproblemofSDRtorquepulse.Itisaneffectivemethodtoincreasetheprecisionofthetorquecontrol,andtoImproveTorquePrecision.KEYWORDS:SwitchedReluctanceMotor:Dsp;Hardware;Software;ImproveTorquePrecisionCLASSNO:TM35学位论文版权使用授权书本学位论文作者完全了解北京交通大学有关保留,使用学位论文的规定。
AA基于DSP的开关磁阻电动机模糊控制系统
基于 !"# 的开关磁阻电动机模糊控制系统
韩玉涛 ! 张奕黄! 殷天明
" 北方交通大学 ! 北京 #$$$%% ) 摘要 & 介绍了一种基于数字信号处理器 ( )*+ , -.*/"#0"!# 的开关磁阻电动机控制系 统。 论述了其各组成部分的工作原理,该控制系统充分利用了 -.*/"#0"!# 周边接口丰 富、 运算速度快、 适于电动机控制的特点, 使系统硬件结构简单, 并实现了采用模糊控制 策略对开关磁阻电动机进行控制。 关键词 & 开关磁阻电动机 1 -.*/"#0"!#1 模糊控制 中图分类号: -./" 文献标识码: 2 韩玉涛 文章编号: %##’ $ #%/! ( "##% , #/ $ ##!" $ #/
’()*+,-. /-01+*23+- 45*5/ 61778 +53*/50 989*-4 :29-. 53 ;’<
345 67 $ 89:; <345= 6> $ ?79@A; 6B5 ->9@ $ C>@A ( 5:D8?ED@ F>9:-:@A 7@>GEDH>8>; 2E>F>@A %###!!; I?>@9 , =:9*/2+*& -?E J9JED >@8D:K7LEH 9 HM>8L?EK DEN7L89@LE C:8:D KD>GE HOH8ECP B8 >H C9>@NO Q9HEK :@ K>A>89N H>A@9N JD:LEHH:D -.*/"#0"!#P -?E JD>@L>JNE :R HOH8EC :JED98>:@ >H KEHLD>QEK >@ 8?E J9JEDP -?E ME9N8?O JED>J?ED9NH 9@K ?>A? $ HJEEK L9NL7N98>:@ R7@L8>:@ :R -.*/"#0"!# >H R7NNO 78>N>SEK 8: H>CJNO 8?E ?9DKM9DE L:@H8D7L8>:@P 07SSO L:@8D:N H8D98EAO
基于DSP的开关磁阻电机调速系统的软硬件设计

基于DSP的开关磁阻电机调速系统的软硬件设计赵贺亮(黑龙江八一农垦大学信息技术学院05级电气工程及其自动化专业,黑龙江大庆163000)1概述20多年来,开关磁阻电机的研究在国内外都取得了很大的发展,而且作为一种新型调速驱动系统,它兼有直流传动和普通交流传动的优点,已经广泛应用于工业、家用电器、电动车辆等诸多领域。
伴随着微电子技术的迅速发展和数字信号处理理论与技术的不断完善,数字信号处理器作为电子信息领域的新型高科技产品,更为电机系统的数字化控制注入了新的生机。
随着DSP在电机控制领域的应用,基于DSP的开关磁阻电机调速系统的研究已如火如荼。
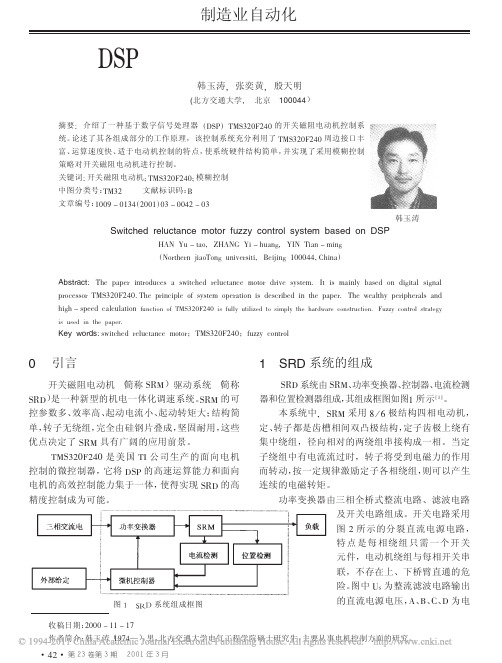
2硬件设计方案开关磁阻电机调速系统是由SRM、功率变换电路、DSP控制器、位置传感器等组成。
本系统的硬件框图如图1:2.1功率变换器的设计功率变换主电路的结构型式很多,有不对称半桥型、双绕组型、电容裂相型、H型、电容转储型等。
可以用来构成SRD功率变换器的主开关器件主要有普通晶闸管、大功率晶体管(GTR)、可关断晶闸管(GTO)、MOS场效应晶体管(MOS-FET)和绝缘栅双极晶体管(IGBT)。
电动机功率变换器主开关器件的选择与电动机的功率等级、供电电压、峰值电流、成本等有关;另外还与主开关器件本身的开关速度、触发难易、开关损耗、抗冲击性、耐用性及市场普及性有关系。
普通晶闸管是使用时间最长、伏安容量最大,并且价格比较便宜,但是因为没有自关断能力,开关频率低,强迫换相电路成本高、可靠性差,故不适宜做功率电路中开关元件。
双极型功率晶体管(GTR)的开关频率高,具有自关断能力,在中、小容量的SRD应用广泛,但其电压、电流过载能力差,承受浪涌电流的能力差,存在二次击穿现象,不易保护。
可关断晶闸管(GTO)在不断关断时要求相当大的反向控制电流,关断控制实现有难度,并存在管压降比普通晶闸管高等不足,因此作为功率电路的开关的应用并不广泛。
功率场效应管MOSFET是一种单极型的电压控制器件,具有驱动电路简单、开关速度快、热稳定性好等优点,但是容量有限制并且比双极型功率晶体管通态压降大,只适用于低电压、小功率的开关磁阻电机系统中。
基于DSP的开关磁阻电机控制器软硬件设计-机械工程论文-工程论文
基于DSP的开关磁阻电机控制器软硬件设计-机械工程论文-工程论文——文章均为WORD文档,下载后可直接编辑使用亦可打印——一、概述目前国内广泛使用的抽油机有游梁式和无游梁式两类,同样以游梁式抽油机为主,其所配电动机大多数为Y系列电动机.长期以来抽油机所配电机大都处于轻载运行状态,负载率极低,功率损耗大,能源浪费严重,抽油机井电耗在油田生产用电中占有很大比例且冲程冲次调节十分不便.本课题采用国内油田最新节能技术,对当今普遍使用的采油机的传动系统进行改造,运用开关磁阻电机代替以往使用的电机,并对开关磁阻电机进行必要的优化控制,以达到油井节能降耗的目的.油田节能采油机传动系统具有较好的运行效果,特别实现低转速、大转矩,在各种工况条件下均会有良好的节电效果,及时调整抽油机的冲次,实现冲次的无级调速,使抽油机工作随时处在最佳运行状态.再利用数字信号处理器DSP的智能控制,可根据油井的实际情况,实现上冲程、下冲程、的速度调节,频繁起停及正反转运行.二、开关磁阻电动机调速理论开关磁阻电机调速系统基本过程分析:SRD的基本运行状态包括启动运行状态、稳定运行状态和制动运行状态.各种运行状态下系统需求不同,采用的控制策略必然有所不同.SRD的基本控制策略为低速运行斩波控制和高速运行角度位置控制.但在具体应用中,笼统的视运行速度切换这两种模式,系统的工作性能很难达到最优.将斩波方式和角度位置调节有机的结合起来,可以改善电机高速运行性能.研究表明,根据不同的运行需求采用组合式控制策略,可以获得更好的控制效果.1.启动运行状态策略SRM由静止不动到正常运转必须经历一个启动过程.SRM的启动比较简单,无需辅助设备,对于三相以及三相以上的电动机可在任意转子位置正、反向启动.对于12/8结构的三相开关磁阻电机,采用电压斩波控制.固定开通角0度,导通180度电角度,起动没有死区,可以在任意位置实现正反转转动.2.稳定运行状态策略SRD的稳定运行是指在恒定负载、恒定转速下的运行.稳态运行是电机的主要运行方式,寻求合适的稳态运行控制策略是决定系统性能优劣的关键.考虑到系统为具有低、中、高速运行的系统,在低速和中速采用低压斩波控制,通过调节绕组上平均电压使得电机近似运行于恒转矩方式,在高速时采用APC控制,通过调节开通角,优化导通角使得系统近似运行于恒功率方式,并且使得系统的效率最优.在高速运行时,开通角是主要的控制变量,电流调节器的输出为开通角,开通角对电机的出力和效率影响很大.为使电机在高速时具有出力大、效率高,把开通角作为主要的调节变量.关断角影响电流波形的宽度,高速时电路峰值比较大,如果导通宽度太大,电流可能续流到电感下降区,产生负转矩,影响出力和效率.可以通过实验找到一定转速范围内的最优的导通宽度,确定关断角.3.制动运行状态策略所谓制动,就是在电动机轴上施加一个与旋转方向相反的转矩.SRM的制动运行包含两重意义,一是利用制动转矩降速,使电机尽快停转;而是发电工作.与直流电机不同,SRM只有再生制动方式,SRM再生制动的实现非常方便,只要加大开通角,使相电流主要在dL/dq0区间段出现即可.所以对于制动状态,采用了固定开关角和电压斩波的控制策略.三、基于DSP的开关磁阻电机控制器硬件设计系统硬件设计总体结构本文采用TMS320LF2812为主控制器并配以高速逻辑电路,以四相8/6极开关磁阻电动机为对象,设计了一种性能优良的开关磁阻电机速度控制系统.介绍了系统的结构和工作原理,给出了位置检测、电流检测、输出及故障保护等电路设计,利用的丰富外设资源,达到简化电路结构、提高运行可靠性的目的.控制系统以TMS320LF2812数字信号处理器控制核心,采用速度、电流双闭环控制结构.DSP捕获光电传感器表示的转子位置信号,变成速度信号和换相控制信号;采样电流传感器表示的电流信号,经过滤波后作为电流调节器的反馈信号,速度调节器的输出作为电流调节的给定.低速时电流调节器的输出经过PWM调制后驱动功率器件,高速时电流调节器输出为导通宽度,使得功率开关在合适的时刻导通和关断相绕组.DSP通过SPI和显示单元传输电机速度、状态等信息,通过通信接口和上位机进行通讯.TMS320LF2812 DSP是TMS320行x28x系列DSP控制器中面向高性能、高精度应用的产品.本系统中,DSP负责判断转子位置信息,实时计算转速,把那个综合各种保护信号和给定信息以及转速情况,给出相通断信号,实现数字PI调节并产生频率固定、占空比变化的PWM 信号,作为功率开关的驱动信号.四、基于DSP的开关磁阻电机控制器软件设计4.1系统控制方案的确定给定速度经过一个电位器组成的分压电路给定,实际速度是由位置传感器电流检测,经过滤波、隔离和整形后,通过DSP的捕获单元输入.DSP利用PID控制算法通过比较单元和脉宽调制电路输出PWM信号,PWM控制信号经过隔离放大输入给驱动模块,在由驱动模块输出的信号控制功率开关相开关的导通与关断,实现SRD的闭环调速控制.4.2系统工作原理控制原理是对过程变量进行采样,数据处理以及根据指定的算法和控制方案进行计算和输出.采用DSP数字PI调节器,实现SRM 的闭环控制.在启动时,DSP检测SR电动机转子初始位置,根据检测到的位置信号,给相应的相绕组发出触发信号,电动机声速运行.SR运行,在升速运行阶段,利用电压斩波控制方式,速度外环反馈的速度与给定值产生偏差,通过速度控制生成电流参考值.转速达到一定值时,SR电动机运行进入速度保持阶段,电流维持一恒定值不变.SR电动机减速运行时,采用斩波控制与制动运行相结合的方式,克服SR电动机的转矩脉动.4.3主程序设计主程序主要完成系统的初始化、初始状态的判断以及起动、运行子程序的调用.初始化包括TMS320LF2812内部各寄存器及变量的初始化, 管理器和通讯显示模块及中断命令初始化,QEP中断触发方式,禁止全部中断,并关闭所有的相输出信号等.根据接收的指令确定系统的运行模式、维护系统正常运行、通讯和显示等工作.4.4定时器中断程序设计定时器中断程序主要是实现电压斩波、换相和速度控制.电压斩波控制在定时器3中断中实现,PWM频率设置为25Hkz;PWM初始占空比为100%,以使对通电相通电瞬间相电流能快速上升;电流检测每40us一次,频率为25Hkz与PWM同频.此部分程序在定时器3中断中实现.程序根据采样的速度和电流信息改变比较寄存器的比较值,从而改变占空比,实现电压斩波的目的.4.5通讯程序设计通讯程序主要采用查询方式,通过CAN总线或者RS-485总线的接收数据,并根据程序要求设定相应的标志位,并根据相应的标志位对所接收的数据进行请求处理后,做出相应的反应或者动作.电动执行器要传送的数据有阀门的实际开度和各种参数,故障时的数据等,在上位机向电动执行器发出请求数据要求且电动执行器收到数据时,电动执行器将现场采集的数据打包发送给上位计算机.当现场出现故障时,电动执行器则不等上位计算机发出请求数据要求,就将故障数据发送.电动执行器可以接收来自上位机的控制信息,进行相应的动作.五、结论5.1总结本次设计采用国内油田最新节能技术,改变了传统采油机构的控制机理和结构,引入了开关磁阻电动机,利用软件控制算法和硬件反馈电路相结合的方法,实现了电动执行机构的数字化智能控制.开关磁阻电机具有结构简单、坚固、工作可靠、效率高、并且其构成的调速系统SRD具有运行性能和经济指标好等突出优点.控制器采用数字信号处理器TMS320LF2812 DSP,TMS320LF2812 DSP是TMS320x28x系列DSP控制器中面向高性能、高精度应用的产品,该器件上集成了多种先进的外设,为电机及其他运动控制领域应用的实现提供了良好的平台.同时代码和指令与F24x系列数字信号处理器完全兼容,从而保证了项目或产品设计的可延续性.F281x系列数字信号处理器具有较高的运算精度和较高的处理能力.此次设计中,以TI公司的TMS320F2812数字信号处理器为主构建的开关磁阻电机系统,通过位置检测器对电机转动圈数进行采集,通过DSPTMS320F2812的QEP模块进行接受,再算出此时转子位置及速度,输出下一相的对应信号,从而实现开关磁阻电机的转动,还可以根据转子位置判断和控制电机转动的方向.经检验,该系统在数据输入、位置随动、故障检测以及位置输出等方面,达到了设计的目标,软硬件设计和实现是可行的.5.2发展展望在石油行业引入该先进技术,会使油田节能采油机传动系统具有较好的运行效果,特别实现低转速、大转矩,在各种工况条件下均会有良好的节电效果.及时调整抽油机的冲次,实现冲次的无级调速,使抽油机工作随时处在最佳运行状态.很好的实现了油田企业的节能降耗.作为一种新型调速驱动系统,开关磁阻电机以其结构简单、低成本、高效率、优良的调速性能和灵活的可控性,愈来愈得到人们的认可和应用.目前已成功应用于在电动车用驱动系统、家用电器、工业应用、伺服系统、高速驱动、航空航天等众多领域中,成为交流电机调速系统、直流电机调速系统和无刷直流电机调速系统的强有力竞争者.在提倡节能降耗的今天,随着计算机技术的发展,电机控制技术和电动执行器控制算法的不断成熟,以及电力电子技术的广泛应用,基于DSP的开关磁阻电机的调速控制系统必然会得到更进一步的发展.参考文献:[1]王晓明.电动机的单片机控制. : 航空航天大学出版社,2002[2]吴守箴.藏英杰.电气传动的脉宽调制技术. :机械工业出版社,1998[3]陈国呈.新型电力电子变换技术. :中国电力出版社,2004[4]戴文进等.特种交流电机及其计算机控制与仿真. :机械工业出版社,2002[5]吴宁.微型计算机原理及应用. :电子工业出版社,2002[6]冯建华.赵亮.单片机应用系统设计与产品开发. :人民邮电出版社,2004[7]王幸之等.8051/8098单片机原理及接口技术. :兵器工业出版社,1998[8]陈伯时.电力拖动自动控制系统. :机械工业出版社,2005[9]范正翘.电力传动与自动控制系统. : 航空航天大学出版社,2003[10]王兆安,黄俊.电力电子技术. :机械工业出版社,2000[11]谢宝昌.电机的DSP控制技术及其应用. : 航空航天大学出版社,2005[12]张雄伟.DSP芯片的原理与开发应用. :电子工业出版社,2000[13]孙建忠.特种电机及其控制. :中国水利水电出版社,2005[14]李忠娟.DSP在电机控制系统中的应用.电机技术,2003(1)[15]彭军.无刷直流伺服电机的DSP控制.电机技术,2005(3)[16]周有为,刘和平.DSP在电机控制中的应用.微特电机,2005(4)。
基于DSP的开关磁阻电机系统的搭建-软件部分实现
目 录摘要‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥1 1 绪论‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥11.1概况‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥11.2国内外发展状况‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥11.3本设计主要任务‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥52 系统设计方案以及原理介绍‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥52.1系统框架构建‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥52.2 TMS320F2812 DSP特点及其原理‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥6 2.3开关磁阻电机‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥82.1.1 开关磁阻电机组成‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥92.1.2 开关磁阻电机工作原理‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥92.1.3 开关磁阻电机控制策略‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥93 系统设计‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥103.1 SRD系统控制器的软件设计‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥10 3.1.1 SRD系统软件设计概述‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥10 3.1.2 初始化程序 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥11 3.1.3 主程序 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥11 3.1.3.1 测速程序‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥11 3.1.3.2 相通断逻辑判断‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥12 3.1.3.3 中断服务程序‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥12 3.2F2812控制模块‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥133.2.1系统Q E P模块‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥133.2.1.1 QEP模块解码‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥14 3.2.1.2 QEP转换流程图‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥153.2.1.3 QEP程序模块‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥153.2.1.4 部分QEP模块寄存器介绍‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥153.2.1.5实验箱Q E P模块电路图‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥163.3系统D A模块‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥163.3.1D A模块流程图‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥173.3.2D A程序模块‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥183.3.3部分事件管理器寄存器介绍‥‥‥‥‥‥‥‥‥‥‥‥183.3.4D A信号输出电路‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥194 实验过程与结果‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥20 5总结‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥24 参考文献‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥25 致谢‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥26 Abstract ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥27【摘要】本设计的主要任务是以TI公司的TMS320F2812数字信号处理器(DSP)为主构建一个用于开关磁阻电机系统。
开关磁阻电机控制系统设计
摘要开关磁阻电机调速系统是一种新型电机调速系统,结构简单,成本低,调速性能优异,是传统交、直流电机调速系统的强有力竞争者,具有强大的市场潜力。
本文以DSP为控制核心,研究并设计了15kW三相12/8极SRM的调速实验系统,用于SRM控制技术的研究。
本文概述了开关磁阻电机调速系统(Switched Reluctance Drive,简称SRD)及其发展和研究现状,论述了其主要研究方向,阐述和分析了开关磁阻电机的结构、运行原理以及系统控制。
并且对SRD系统总体硬件结构进行了设计。
采用不对称半桥型结构,在进行了相关功率器件选型计算的基础上设计了该SRD调速实验系统的功率变换器。
然后,以TMS320LF2407为核心设计了开关磁阻电机控制系统的硬件电路,给出了包括电流检测、位置检测、故障保护等部分电路的详细设计,充分利用了DSP的丰富外设资源,达到了简化电路结构、提高运行可靠性的目的。
另外本文讨论了开关磁阻电机控制软件的设计,采用模块化编程方法,采用基于多中断的控制程序,提高了控制软件的效率。
最后,利用MATLAB/SIMULINK对上述12/8极开关磁阻电机调速系统建立了非线性仿真模型,并对该系统进行了仿真实验,实现了调速,并达到了开关磁阻电机调速系统研究和设计的预期目标,验证和深化了前文所取得一些理论成果,同时也为更近一步研究打下了基础。
关键词:开关磁阻电机;调速系统;DSP;MATLAB/SIMULINK;仿真ABSTRACTSwitched Reluctance Drive system is a new motor drive system. It has many good features for example simple structure, low cost and excellent driving performance. It's the strongest competitor to traditional AC and DC drive system, so it has powerful future.This paper developed a speed experimental system for a 3-phase 12/8-pole SRM of 15 kW based on TMS320LF2407 DSP, which can be used for the technical research on SRM control.The thesis summarizes the development and research of switched reluctance drive (SRD), discusses the main research direction. The structure of SRM, operation principle, and the control scheme of the SRD are elaborated and analyzed. And the whole structure of hardware is schemed out for the SRD speed experimental system. Adopting the dissymmetry half-bridge structure, a power converter is designed for the system after selection calculation of the corresponding devices. Then, TMS320LF2407 DSP is used to design the hardware circuits of SRM control system, and design details including the current detection, position sensing, fault protection and PWM output etc. are provided. Because of the full use of the abundant peripheral resources of DSP, it comes to the aim simplifying the circuit structure and heightening the reliability. Also, the thesis discusses the routine designing issue. Because the modularized programming method is adopted, and multi-interrupt processing technique is used, operation efficiency of the control software is highly raised. At last, with the MATLAB/SIMULINK a nonlinear simulation model for the foregoing 12/8-pole SRM control system is established. And the simulation experiments have been done on this model. Speed adjustment is realized, and other targets on the research and design of SRM control system are reached, which establishes a good foundation for further research.Keywords:Switched Reluctance Motor; Drive System; DSP; MATLAB/SIMULINK;Simulation目录1 绪论 (1)1.1开关磁阻电机的发展概述 (1)1.2开关磁阻电机调速系统组成 (2)1.3开关磁阻电机调速系统研究现状和方向 (2)1.4本文研究的内容 (4)2 开关磁阻电机原理 (5)2.1开关磁阻电机的基本结构和运行原理 (5)2.1.1电机结构 (5)2.1.2运行的原理 (6)2.1.3电机的基本方程 (7)2.2开关磁阻电机调速系统的基本控制方式 (8)2.2.1角度控制方式(APC) (9)2.2.2电流斩波方式(CCC) (10)2.2.3电压斩波PWM控制方式 (11)2.2.4组合控制 (13)2.3系统控制方式及控制策略的确定 (13)3 SRD调速实验系统硬件设计 (15)3.1 SRD系统设计方案 (15)3.2基于TMS320LF2407控制器的SRD系统硬件结构设计 (16)3.3功率变换器设计与选型 (18)3.3.1功率变换器主电路的选择 (19)3.3.2功率开关器件的选择及参数计算 (19)3.3.3 IGBT驱动电路的设计 (21)3.4控制、检测和保护电路的设计 (22)3.4.1转子位置检测 (22)3.4.2 PWM输出电路 (23)3.4.3电流检测电路 (24)3.4.4故障检测与保护电路 (25)3.4.5键盘与显示电路 (27)4 软件设计 (29)4.1总的设计思路 (29)4.2主程序设计 (29)4.2.1初始化子程序 (29)4.2.2键盘和显示子程序 (31)4.2.3功率驱动保护子程序 (32)5 SRD系统仿真 (34)5.1基于MATLAB/SIMULINK的SRD非线性仿真模型的建立 (34)5.2 CCC方案下SRD仿真模型 (35)5.3 仿真结果 (40)6 总结 (45)参考文献 (46)翻译部分 (48)中文译文 (48)英文原文 (57)致谢 (68)1 绪论开关磁阻电机调速系统(Switched Reluctance Drive,SRD)是80年代中期发展起来的新型调速系统[1]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
r.0
翌蜒删 8 6
4
t/(0 us,格)t/(O us/格J
2
(a)口:I 80。H『.”II.吨波形
(b)口;180。时,io.iA波形
口/(。)
(a)桥竹阻抗角妒仿真图形
0
童/(”J
(b)再电流比仿真嘲形
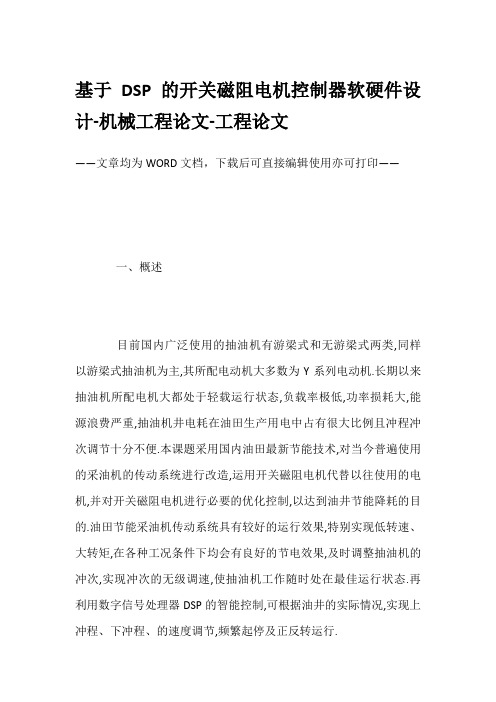
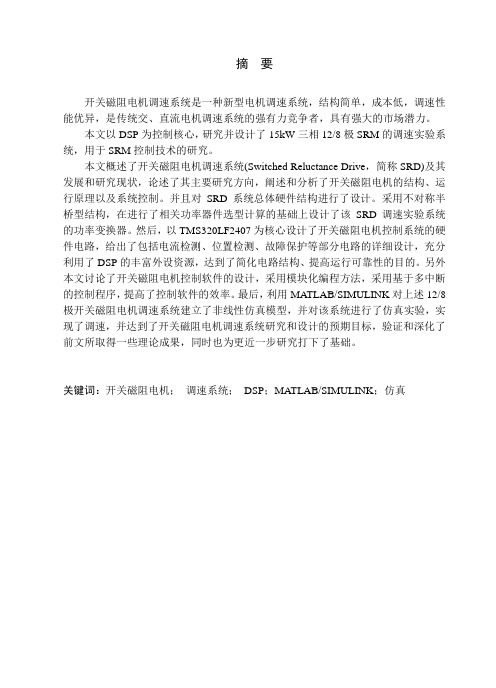
图4 Q--45时时域仿真波形
图4a示出桥臂阻抗角曲线,4b示出电流增益
7_ ‰ l
由于谊的作用,厶逐渐比矗大,仇也逐渐比a大。
提出一种新型LLC超高频感应加热电源谐振
所以谊使得超前桥臂轻松实现ZVS,却对滞后桥臂 变换器。该变换器中串联的两个谐振电感抑制了环
实现软开关有阻碍作用。
’’
流.它无需在逆变器之间附加多余元件.即可保系统
根据式(6),(9),(10)构造了谐振变换器,参数
图5e.d是a=1440时的试验波形。可见,此时滞 后桥臂较难实现ZVS.滞后桥臂的电流明显变小,而 且负载电流也明显减小.电源效率下降明显。
参考文献
【1】Moissseev S,Muraoka H,Nakamura M,et aLZero Voltage Soft Switching PWM Hi曲-frequency Inverter using IGBTs for Induction Heated Fixed Roller[J].IEE Proceedings Electric Power Applications,2003,150(2):237-244.
}
霉萋
量莹 一
,B
,
/ 、山
/、
囊
/
≥堇 /
/
曲线。图中实线和虚线是理论分析值,两种星形线是 仿真值。仿真波形验证了基波分析的正确性。从图中
t/(o.i usl格)t/{O.I ps,格)
(c)口;114。时.%,ia波形
“)口=114。时./a,fA波形
图5 a=1800及a=144。的实验波形
可以明显看出,当a=O时两桥臂平衡,当a增大时, 5结论
【2】沈锦飞,惠晶,吴雷.2 MHz II kW超高频感应加热电 源【J】.电力电子技术,2002,36(6):13—15.
【3】LIANG Yah,uU Wen-duo,LU Bing,et aLDesign of Integrat- ed Passive Component for a I MHz/I kW HMf-bfidge LLC Resonant Conveaer[A].IEEE IAS 7 05【C】.1995,3:2223—
采用上述控制原理设计制作了SRM的调速控制 器,不同转速下,n与电流i响应试验波形如图5所示。
比,从而实现电流斩波控制。绕组£。和£。工作与£。
相同。当续流时,(以厶为例说明)电流通过VDt'和
VD:回路向电容C充电,实现续流。同理,VD,7和
VD。,VD/和VD。为L。和k绕组的续流回路。设计
采用的方法是VT2和VT47,VT4和VT6’,VT6和vT27
强喜i2旦掣
(4)
锵节伞
定—搠
电感£
转r位簧0
图l SRM电感与角位置关系
.
2.2 系统结构
该系统由SRM、位置检测、电流检测、功率变换
器和驱动系统以及以DSP为核心的控制单元组成。
系统结构如图2所示,其中虚线部分主要由
TMS320LF2407来完成。由图2可见,系统中的大部
分功能均由软件实现,包括转速调节、电流调节、电
器,该控制器采用位置和电流双闭环控制策略。分析电机不同转速情况下的运转特性之后,给出了不同的控制策略,
并详细描述了SRM控制系统的核心控制策略,根据给定转速和实际负载对系统进行了对比试验.试验结果表明,实 现了全数字控制SRM调速系统的。
关键词:电动机;控制器/开关磁阻电机;全数字;数字信号处理
中图分类号:TM34
算电机的转速。光电编码盘的输出信号经过处理直 接与DSP的捕获单元CAP连接实现。电流检测采用 霍尔电流传感器实现,检测电流经滤波处理与DSP 的10位A/D转换单元连接,实现电流的及时检测。
(2)电机低速运行时,绕组中旋转电动势小,电 流增长快。在制动运行时,旋转电动势的方向与绕组 端电压方向相同.电流比低速运行时增长更快。在这 两种工况下.采用电流斩波控制方式能够限制电流 峰值,使其不超过允许值,同时电流斩波使电流波形
manee is improved.
Keywords:motor;contmUer/switch reluctance motor;full-digital;digital signal processing
1前 言
目前,开关磁阻电机(SRM)调速系统的应用越 来越广泛。它具有结构简单,坚固耐用,调速性能好。
机转向控制等和最后直接输出逻辑电平型脉宽调制
信号的驱动功率模块。
定稿日期:2008.019一16 作者简介:袁驰(1961一),女.辽宁辽中人。教授,研究方向
为电机拖动技术、变流技术、机电一体化技术等。
万方数据
图2系统结构图
第43卷第2期 2009年2月
电力电子技术 Power Electronics
的控制性能在转速为l 200r·minq时具有高性能的控
制特性,图5b,c反映了控制系统在突然加载和卸载
时系统的响应过程。可见所介绍的控制策略可以实现
SRM的高性能控制.随着功能强大的微处理器和价格
低廉的DSP的出现,将从成本和控制复(下转第57页)
‘萋茎匪=||{|匪 超高频感应加热电源的新型谐振变换器研究
V01.43 No.2 February,2009
3控制系统设计 图3示出基于TMS320LF2407的SRM控制电
路组成。由于智能功率模块中集成了功率保护电路 和IGBT触发电路,故简化了系统结构。由霍尔元件 检测到的电流经过隔离放大后被DSP的A/D转换模 块采样,采样电流作为电流环的反馈;位置信号为 TMS320LF2407的捕获单元所获取:本系统还可以通 过CAN控制器模块与网络上的其它设备进行通讯。
文献标识码:A
文章编号:1000—100X(2009)02-0027-02
Design of SRM Control System based on DSP
YUAN Chi.FAN Yan
(Weifang University.Weifang 261061,China) Abstract:A full-digital switch reluctance motor(SRM)control system is designed。which based on the linear model of SRM and the torque characteristics.TMS320LF2407 DSP and[PM are applied in the system design.Position and current double- closed feed back control strategy is also used.In order to get excellent performances,different control strategies are used ac— cording to the operate performance.The experiment based on the given-speed and actual-torque verifies the operation perfor-
呈较宽的平顶状.产生的转矩也比较平稳,合成转矩 脉动明显比其它控制方式小。在高速运行时采用变 角度电压斩波控制.通过PWM方式调节绕组电压 平均值.间接调节和限制过大的绕组电流,适用于高 速运行。在这种方式下,电机抗负载扰动的动态响应 快.更适合用作转速调节系统。控制绕组通电时的 开通角度为氏,关断角度为%,当转子位置到达钆 时。相应绕组通电,在鼠。和%之间,对绕组施加正 向电压,建立和维持电流,在%之后,对绕组施加反 向电压,使电流快速直下降至零。开通角度、关断角 度选取得好.就可以很大程度上减小系统的损耗,提 高能鼍利用率。 4控制系统试验结果
的环流很小.故可采用桥的并联方式扩展电源容量。
如表l所示:
表I谐振变换器参数
所采用的移相控制方式。通过改变两臂对角线上下 管驱动电压移相角的大小来调节输出电压.’并在控
PJ硪P。冈 U。IV RI以LIp.H f,./MHz
制端对同一桥臂的两个反相驱动电压设置不同的死 区时间,有效减少了开关损耗与干扰。同时运用基波
2.1 系统工作原理 图1示出SRM的电感在运行中随着角位置变
化而变化示意图。其工作原理遵循磁阻最小原理,即 磁通总是要沿磁阻最小路径闭合.磁场扭曲而产生
磁阻性质的电磁转矩。根据能量守恒和电磁感应定
律.施加在各定子绕组端的电压等于电阻压降和因
磁链变化而产生的感应电势作用之和.则通过SRM
每~相的瞬时端电压与相绕阻的磁链有以下关系:
10.8
I.06
15.0 4x470
根据设计方案参数选用IRF740功率MOSFET (400 V/10 A)作为谐振变换器开关管。谐振电感选 用空心电感器以减少磁心损耗。根据以上实验参数, 得到了如图5的实验波形。
图5a.b示出移相角ot=1800时的试验波形。Ⅱ。 和i。之间有500相位差,使谐振变换器可以轻松实 现ZVS。开关频率为1.6 MHz,输出功率为l kW。负 载电流远大于桥臂电流.电流增益超过10。
第43卷第2期 2009年2月
电力电子技术
Power Electronics
基于DSP的开关磁阻电机控制系统设计
袁驰,范 岩 (潍坊学院,山东潍坊261061)
V01.43 No.2 February.2009