开关磁阻电机控制系统软件设计
基于DSP的开关磁阻电机调速系统的软硬件设计方案

电 力 工 程
基于DP 开关磁阻电 S的 机调速系统的 软硬件设计方案
章 余 思
( 州 电业局 , 建 福 州 30 0 ) 福 福 5 0 0
摘 要 : 文介 绍 了以 T S 2 F 4 7 片 为核 心的 高性 能 数 字化 S D控 制 器 的设 计 , 出 了硬件 电路 设 计 和软 件设 计 策略 。 本 M 30 20 芯 R 给 关键 词 : 字信 号 处理 器 ; 关磁 阻电机 调速 系统 ; M 3 0 2 0 芯 片 数 开 T S 2 F4 7
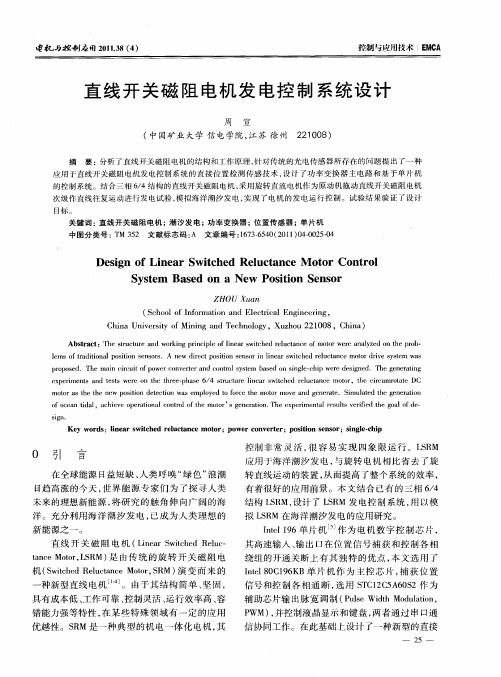
1引 言 组也 构 成 回路 , B相 电流 增 大 , 使 中性点 电位 必 然增 高 , 使 A相续 促 2 O多年 来 ,开 关 磁 阻 电机 的研 究在 国 内外都 取 得 了很 大 的发 流迅 速 衰减 , 行换 相 。 强 紧接 着关 断 v , 3 开通 V , C D相 导通 , 4则 , 依 展 , 且 作为 一 种 新 型调 速 驱 动 系 统 , 而 它兼 有 直 流 传 动 和 普通 交 流 次循 环 导通 , 电机就 连续 运行 起 来 。 传 动 的优 点 , 已经 广 泛 应 用 于 工 业 、 用 电 器 、 家 电动 车 辆 等诸 多 领 2 主 开关 驱动 电路 的设 计 . 2 域 。 随 着微 电子 技术 的迅速 发 展 和数 字信 号处 理 理论 与技 术 的不 伴 本 系统 采 用 的驱 动 电路 模 块 是 E B 4 ,该 电路 的 优 点是 驱 动 X 8I 抗 速 保 可 断完善 ,数字信号处理器作 为电子信息领域的新型高科技产品, 更 电路 集 成 化 , 干 扰 能 力 强 , 度 较 高 , 护 功 能 较 完 善 , 实 现 为 电机 系 统 的数 字 化控 制 注 入 了新 的生 机 。 随着 D P在 电机 控 制 I B S G T的最 优驱 动 。 领域 的应用 ,基 于 D P的开 关 磁 阻 电机 调 速 系统 的研 究 已 如火 如 S I B、 驱 动 电路 的要 求注 意 以下几 个 问题 : G q对 荼。 ( 1 态驱 动 能 力强 。 为 I B 栅 极 提供 具 有 陡峭 前后 沿 的驱 )动 能 GT 2 硬件设 计 方案 动脉 冲。IB G T的开关 速度 与 其栅 极控 制 信号 的 变化 速 度密 切相 关 。 开 关磁 阻 电机调 速 系统 是 由 S M、 率 变换 电路 、S 控 制 器 、 IB R 功 DP G T的栅 极 电压 源 特性 呈 非线 性 电 容性 质 ,用小 内阻 的 驱动 源 对 位 置传 感器 等组 成 。本 系统 的硬件 框 图如 图 : 栅极 电容 充放 电 , 以保证 栅 极 控制 电压有 足 够 陡 的前后 沿 , I B 使 GT 的 开关 损耗 尽量 小 。 ( 2 向 IB )能 G T提供 适 当 的正 向栅 压 。 ( 3 向 IB )能 G T提 供 足 够 的反 向栅 压 。在 IB G T关 断期 间 , 由于 电路 中其它 部分 工 作 ,会 在栅 极 电路 中产 生一 些 高频 振荡 信 号 , 这 些信 号 轻则 会使 本 该截 止 的 I B G T处于 微通 状 态 , 加 管 子 的功耗 , 增 重 则将 使 逆 变 电路 处 于 短 路直 通 状 态 , 因此 , 好 给 应处 于截 止 状 最 态 的 IB G T加 反 向栅 压 f 一 般 为 :V lV , IB 幅值 5 ~ 5 ) G T在 栅 极 出现 使 开关 噪 声时 仍能 可靠 截 止 。 图 1开 关磁 阻电机 调速 系统框 图 ( 4 )有 足够 的输 入 、 出 电隔 离能 力 。驱 动 器具 有 电 隔离 能力 , 输 21功率 变换 器 的设 计 . 可 以保 证设 备 的正 常T 作 , 是这 种 隔离 不 应影 响 驱 动信 号 的正 常 但 功 率变 换 主 电路 的结构 型式 很 多 , 不 对 称半 桥 型 、 有 双绕 组 型 、 传输 。 电容裂 相 型 、 型 、 H 电容转 储 型等 。 ( 5 )具 有 栅压 限幅 电路 , 护 栅极 不 被击 穿 。I B 保 G T栅 极极 限电 可 以用 来 构成 S D功 率变 换 器 的 主开 关 器件 主要 有 普通 晶闸 压 为+ 0 驱 动信 号超 出此范 围就 可 能破 坏栅 极 。 R _ V, 2 管 、 功 率 晶 体 管 (T )可 关 断 晶 闸管 (T )MO 场 效 应 晶 体 管 大 G R、 GO、 S ( 6 )理想 的驱动 电路 要 求输 入 、 出信 号传 输无 延 时 。 一方 面 输 这 f SE ) MO F T和绝 缘栅 双 极 晶体 管( B ) I T。电动机 功 率变 换 器主 开关 器 能够 减 少系 统 响应滞 后 , G 另一 方 面 能提 高保 护 的快速 性 。 件 的选 择 与 电 动机 的功 率 等级 、 电 电压 、 值 电 流 、 本 等有 关 ; 供 峰 成 23位置 传感 器设 计 - 另 外还 与 主开关 器 件本 身 的 开关 速度 、 发难 易 、 损 耗 、 冲击 触 开关 抗 位 置检 测器 作用 是 向 D P端 口正确 提供 转子 位 置信 息 。 S 性、 耐用 性及 市 场普 及 性有关 系。 本 系统 的转 子位 置 信号 传感 器 是 由光 电 传感 元件 f 部 分) 固定 和 双 极 型 功率 晶体 管 ( T 的 开 关 频率 高 , 有 自关 断 能力 , G R) 具 在 光 电盘 ( 转部 分) 成 。 构如 图 3齿 盘上 6 间 隔 3 o 旋 构 结 , 个 0的齿槽 , 与 中 、 容量 的 S D应 用 广 泛 , 其 电压 、 流过 载 能 力差 , 受浪 涌 电机 转 子 同轴 。 电传 感 器 S 小 R 但 电 承 光 、P固定 在 电机 机壳 上 , 遮 挡传感 当齿 电流 的能力 差 , 二 次击 穿 现象 , 易保 护 。 存在 不 器 的光 路 , 敏 管处 于 截止 状 态 ; 光敏 管受 光 导 通 。电机 旋 转 时 , 光 当 0的方 可 关 断 晶 闸管 ( T 在 不 断 关 断 时要 求 相 当大 的反 向控 制 电 传感 器 输 出 3 。 波信 号 ,如 图 4表示 电机转 动 时两 个 位 置传 感 G O) 流 , 控 制实 现有 难 度 , 存 在 管 压 降 比普通 晶闸管 高 等 不足 , 关断 并 因 器输 出信号 。 此作 为 功率 电路 的开关 的应 用 并 不广 泛 。 功 率场 效 应管 M S E O F T是 一种 单 极 型的 电压控 制 器 件 ,具 有 驱 动 电路简 单 、 速 度快 、 稳 定性 好 等优 点 , 是容 量 有 限制 并 开关 热 但 S 且 比双极 型 功 率 晶体 管 通 态 压 降大 , 只适 用 于低 电压 、 功率 的开 小 关 磁 阻电机 系 统 中。 绝 缘 栅 双极 型 晶 体 管 (G T) 8 I B 是 0年代 出现 的新 型 复合 开关 器 件 , 有工 作 频率 较 高 , 具 控制 实 现 比较 简 单 , 而且 单 管 的电 压定 额 与 电流 定额 也 已经 做得 很 大 , 已经 可 以满 足 对本 装 置 功率 器 件 的要 图 3 转子 位 置信 号传 感 器结 构 图 图 4 位 置传 感 器信 号 图 求, 因此经 综 合考 虑 选用 I B G T作 为本 系 统 S D功 率 变换 器 的 主开 R 电机 速 度 的检测 主 要是 通过 检 测传 感器 输 出信 号来 实 现 的。 可 关 器件 。本 文采 用 H型 的功 率 电路 , 图 2所示 。 如 以采 用检 测 脉 冲 宽 度 、 压 转 换 或 其它 方 式 来 实 现 , 文 采用 的是 频 本 脉 冲 宽度测 速 法 。 图 4中高 电平 部 分 表示 电机转 子 转 过 3 即一 0度 周 的 11 所 需 的时 间 l 对应 的 电机 转速 为 1则 有 : /2 , 设 1 ,
直线开关磁阻电机发电控制系统设计
Ke y wor ds:lne r s t h eucanc ot r;powe onv r e i a wic ed r l t n e o i l - hi
0 引 言
在全 球能 源 日益短 缺 、 类 呼 唤 “ 色 ” 潮 人 绿 浪 日趋 高涨 的今 天 , 界 能 源 专 家 们 为 了探 寻 人 类 世 未 来 的理想 新 能 源 , 研 究 的触 角 伸 向 广 阔 的海 将 洋 。充 分利 用 海 洋 潮 汐发 电 , 已成 为 人 类 理 想 的
关 键 词 : 线 开 关 磁 阻 电 机 ;潮 汐 发 电 ;功 率 变 换 器 ; 置 传 感 器 ;单 片 机 直 位
中 图 分 类 号 : M 5 文 献 标 志码 : 文 章 编 号 :6 364 (0 1 0 -0 50 T 32 A 17 -5 0 2 1 )402 -4
De i n o ne r S t h d l c a e M o o nt o sg f Li a wic e Re u t nc t r Co r l
Sy t m s d o w sto Se s r se Ba e n a Ne Po iin n o
zHoU a Xu n
( c ol f noma o n l tcl n ier g S ho o fr t nad Ee r a E g ei , I i ci n n C iaU iesyo nn n eh o g , uh u2 10 ,C ia hn nvri f t MiigadT cn l y X zo 2 0 8 hn ) o
迫 机 再粒 制 应 用 2 1,8( ) 01 3 4
控制与应用技术 ; M A EC
直 线 开 关 磁 阻 电 机 发 电控 制 系 统 设 计
开关磁阻电机调速系统控制器软件设计研究
1 基本控制策略
调速 系统 的关键 是对 转矩 进行 控 制 。对 于开 关
磁 阻 电机 的特 点之 一是 可控参 数较 多 ,开通 角 、关 断角 、相 电压 、相 电流都 可 以影 响转矩 。对 转速 进
矩 ,可 以分 为 电流 上 限控 制 和 电流 上 、下 限 控 制 。 电流 斩波 控制 的优 点是 可 限制 电流 峰值 的增长 ,并 起 到 良好 有效 地调 节效 果 ,因此适用 于低 速调 速系
限制 和调 节相 电流 ,因此 既 能 用 于 高 速调 速 系 统 , 又能 用于 低速 调速 系 统 ,而且 控制也 较 简单 。
转 矩 的 目的 。角 度 控 制 的优 点 是 转 矩 调 节 范 围 较
大 ,可 允许 多相 同 时 通 电 ,以 增 加 电 动 机 输 出转 矩 ,可 实现效 率最 优控 制和 转矩最 优 控制 ,但是 角
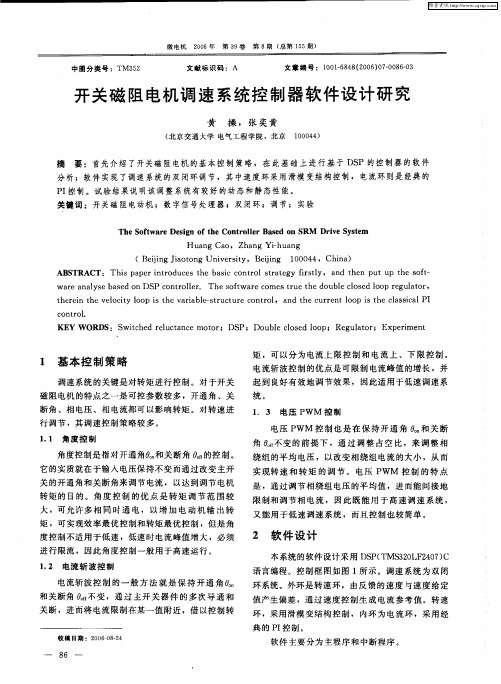
典的 P 控制。 I 软件 主要分 为 主程 序和 中断程序 。
关 断 ,进 而将 电流 限制在 某一 值 附近 ,借 以控制 转
2 软 件 设 计
本系统 的软件设 计采 用 D P T 3 O F 4 7 C S ( MS 2 L 2 O )
语 言编程 。控制 框 图如 图 1所 示 。调速 系 统 为双 闭 环系统 。外 环是 转 速环 ,由反馈 的 速度 与 速度 给定
值 产生偏差 ,通 过 速度 控 制生 成 电流 参 考值 。转 速 环 ,采用滑 模变 结 构 控制 ,内环 为 电流 环 ,采用 经
H u n o Z a g Yi u n a g Ca , h n — a g h
(B in i tn ies y e igJ oo gUnv ri ,B in 1 0 4 ,C ia j a t e ig 0 0 4 j hn )
maxwell软件- 开关磁阻电机
15 开关磁阻电机本章我们将简化RMxprt 一些基本操作的介绍,以便介绍一些更高级的使用。
有关RMxprt 基本操作的详细介绍请参考第一部分的章节。
15.1基本理论开关磁阻电机的定子和转子均为凸极结构,通常定子的极对数大于转子的极对数。
定子磁极上有多相集中绕组,转子上无绕组。
当定子上某(些)绕组通电时,由于磁阻的差异,转子将受到力矩的作用,转子磁极向与定子磁极对齐(磁阻最小)的位置转动,以使定子绕组获得最大的磁链。
绕组的相数是定子极数与定、转子极数的最小公约数之比。
在开关磁阻电动机(SRM)中,定子和转子的极数不同,转子上设有位置传感器,定子电流严格地根据转子的位置换向。
转子的位置信号通过位置传感器获得。
定子绕组按顺序触发,一般情况下当一相绕组电流关断或快要关断时,下一相绕组被触发。
因此可以忽略两相绕组间的相互影响。
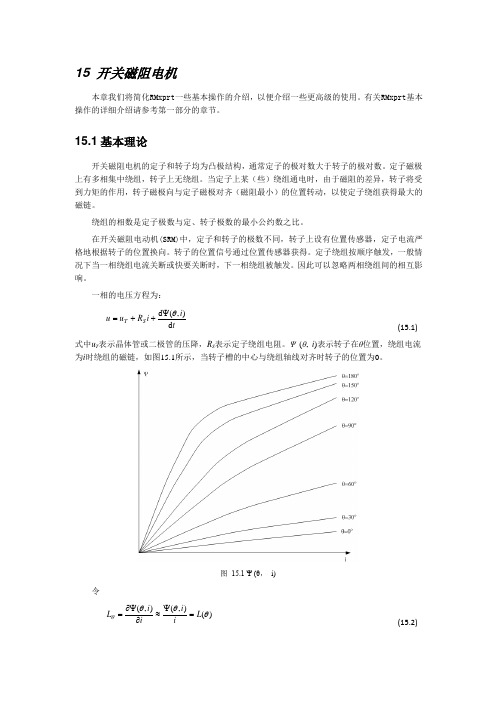
一相的电压方程为: t i i R u u S T d ),(d θψ++= (15.1)式中u T 表示晶体管或二极管的压降,R S 表示定子绕组电阻。
Ψ (θ, i )表示转子在θ位置,绕组电流为i 时绕组的磁链,如图15.1所示,当转子槽的中心与绕组轴线对齐时转子的位置为0。
图 15.1 Ψ (θ, i)令)(),(),(θθθθL i i i i L =ψ≈∂ψ∂= (15.2))(),(θθθθθG L i i 1G =∂∂≈∂ψ∂=(15.3)得出 i G i L i R u u e S T ωθ+++=p(15.4)式中ωe 表示转速,用电角度表示,微分算子为: t d dp = (15.5)瞬时电磁转矩t 2为:22Gi 21t = (15.6) 输入电功率可由电压和电流获得:⎰=T 1t ui T 1P 0d (15.7)输出的机械功率为:)(Fe t Cua fw 12P P P P P P +++-= (15.8) 式中P fw ,P Cua ,P t 和P Fe 分别表示摩擦和风损耗、电枢铜损耗、晶体管/二极管压降损耗和铁心损耗。
毕业设计小功率开关磁阻电机控制与驱动系统的设计

毕业设计--小功率开关磁阻电机控制与驱动系统的设计摘要本文首先介绍了开关磁阻电机(SRM)在国内外的发展状况,接着介绍了开关磁阻电机调速系统(SRD)的特点、应用领域和目前研究的热点;并对开关磁阻电机的运行原理和电磁特性及其数学模型进行阐述,建立了开关磁阻电机的线性电感模型,在此基础上分析了开关磁阻电机的电磁转矩,进而得到开关磁阻电机的调速控制方法。
其次,详细介绍了开关磁阻电机调速系统的各个组成部分,并介绍了目前常用的控制方法,分析了各种控制方法的优缺点,在此基础上,本文结合4kW/513V、三相12/8极开关磁阻电机进行了系统的软硬件设计。
硬件设计包括对开关磁阻电机调速系统的功率变化器主电路的设计及参数选择,设计中采用功率MOSFET为主开关器件,以驱动芯片TLP250为核心设计驱动电路;以单片机AT89C51和电机智能控制模块为核心设计控制电路;此外还设计了位置检测电路、电流检测电路、逻辑综合电路和数码显示电路等。
其中电机智能控制模块实现速度、电流双PI调节、PWM生成、电流保护、斩波比较等功能;单片机负责判断转子的位置信息,并综合各种保护信号和给定信息,以及转速情况,给出相通信号及电流斩波阈值。
在控制软件设计中采用模块化编程,增强了程序的通用性和可读性。
关键词:开关磁阻电机;控制; AT89C51;功率MOSFETABSTRACTABSTRACT: Firstly, the thesis not only presents the developing status of the SRD system both in domestic and abroad,but also introduces the configuration application area and research hotspot of SRD system,and then expatiate the electromagnetism principle and mathematic model of SRM, establishes liner inductance model of SRM, then analysis electromagnetism torque of SRD system based on linear inductance model,get the control method of SRD system finally.Secondly, the thesis introduces all parts of SRD system in detail, and introduces the control method now used, give out the advantage and disadvantage of any method. And then the thesis designs the hardware and software of the SRD system based on 4kW/513V, 12/8 SRM. Hardware implementation including of choosing the structure and parameter of power converter with its power component--POWER MOSFET; As the core driver circuit to drive the chip TLP250; The control circuit with the core components----AT89C51&motor intelligent module is designed. Also the position sensor testing circuit, current sensor testing circuit, logic synthesis circuit and digital display circuit are designed. The function of motor intelligent circuits to-realize dual PI adjuster of speed and current, PWM generation, current protection, chop-wave comparison.While the function of AT89C51 is to judge rotator location information, synthesize various protection signal and commanded information, and speed condition, then give the phase on/off signal and chopped current limited value. The software of system is programmed. The Modular Structured programming makes the program readable and modifiable.KEYWORDS: SRM; CONTROL; AT89C51; POWER MOSFET目录摘要 (I)ABSTRACT (II)第一章绪论 (1)1.1开关磁阻电机的发展 (1)1.2 开关磁阻电机调速系统的特点和应用领域 (1)1.3当前的主要研究热点和发展方向 (3)1.4本课题主要工作 (4)第二章开关磁阻电机的基本理论分析 (5)2.1开关磁阻电动机调速系统的组成 (5)2.2开关磁阻电动机结构与运行原理 (5)2.3开关磁阻电机的基本方程 (7)2.4基于理想线性模型的SR电动机分析 (8)2.4.1 SR电机的相电感模型 (8)2.4.2 SR电机的电磁转矩 (9)2.5考虑磁路饱和时SR电动机的分析 (10)2.6SR电机的基本控制方式 (12)2.7开关磁阻电机调速系统总体方案的确定 (13)第三章小功率开关磁阻电机驱动系统硬件设计 (15)3.1开关磁阻电机的参数 (15)3.2功率变换器的结构设计 (15)3.2.1主电路拓扑结构介绍 (15)3.2.2功率电路的设计 (19)3.2.3功率变换器的驱动电路设计 (21)3.2.4 功率缓冲(吸收)电路设计 (23)3.3驱动系统设计 (25)3.3.1总体设计 (25)3.3.2控制核心AT89C51功能 (26)3.3.3 电机智能控制模块MCSRD9800 (26)3.3.4 位置检测部分设计 (31)3.3.5 电流检测部分设计 (32)3.3.6角度细分电路 (33)3.3.7 D/A转换与斩波电路 (34)3.3.8 优先编码电路 (35)3.3.9逻辑综合电路 (36)3.3.10显示电路 (36)3.3.11单片机最小系统 (37)第四章 4KW开关磁阻电机驱动系统软件设计 (39)4.1主程序 (39)4.2运行子程序 (41)4.3相中断程序 (43)4.4INTO中断子程序 (45)4.5软件抗干扰措施 (45)致谢 (47)参考文献 (48)第一章绪论1.1 开关磁阻电机的发展20世纪60年代以前,在需要可逆、可调速与高性能的电气传动技术领域中,直流传动系统一直占领统治地位。
基于DSP的开关磁阻电机系统的搭建-软件部分实现
目 录摘要‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥1 1 绪论‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥11.1概况‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥11.2国内外发展状况‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥11.3本设计主要任务‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥52 系统设计方案以及原理介绍‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥52.1系统框架构建‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥52.2 TMS320F2812 DSP特点及其原理‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥6 2.3开关磁阻电机‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥82.1.1 开关磁阻电机组成‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥92.1.2 开关磁阻电机工作原理‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥92.1.3 开关磁阻电机控制策略‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥93 系统设计‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥103.1 SRD系统控制器的软件设计‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥10 3.1.1 SRD系统软件设计概述‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥10 3.1.2 初始化程序 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥11 3.1.3 主程序 ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥11 3.1.3.1 测速程序‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥11 3.1.3.2 相通断逻辑判断‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥12 3.1.3.3 中断服务程序‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥12 3.2F2812控制模块‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥133.2.1系统Q E P模块‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥133.2.1.1 QEP模块解码‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥14 3.2.1.2 QEP转换流程图‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥153.2.1.3 QEP程序模块‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥153.2.1.4 部分QEP模块寄存器介绍‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥153.2.1.5实验箱Q E P模块电路图‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥163.3系统D A模块‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥163.3.1D A模块流程图‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥173.3.2D A程序模块‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥183.3.3部分事件管理器寄存器介绍‥‥‥‥‥‥‥‥‥‥‥‥183.3.4D A信号输出电路‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥194 实验过程与结果‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥20 5总结‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥24 参考文献‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥25 致谢‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥26 Abstract ‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥27【摘要】本设计的主要任务是以TI公司的TMS320F2812数字信号处理器(DSP)为主构建一个用于开关磁阻电机系统。
开关磁阻电机调速系统控制软件的优化研究
5 结 语
E .z\ 簿
将 软 件 测 试 的 方 法 用 于 SRM 控 制 软 件 的 测试 之 中 ,能 够 0 9 8 7 6 5 4 3 修复原软件的实时和时序冲突缺 陷,重新改写并扩展软 件的功 能 ;硬件选择不对称半桥结构功率变换器作为主 电路 的开关器 件 ,从 降低成本和功耗 的角度考虑用逻辑 电路作 为单 片机的扩 展接 口,由实验 可知 重新 设计 的控制 系统 性能确 实有 极 大提 高 。
tional Conference on audio,
Ec],2008 L4j Macariu G,Cretu V.TImed Automata Model for Componenv
Based Real—Time SystemsrA]. 2010 17th IEEE International C o nference and W orkshops on Engineering of Computer Based
Va1idation(IcsT)[C],2010 [6] Rotithor H.Embedded Instrumentation for Evaluating Task
Sharing Perfor m ance in a Distributed Computing System[J].
IEEE Transactions on Instrum entation and M easurem ent。 1992,41(4):316~ 321
Systems(ECBS)Ec],2010 Es]Feliachi A,Le Guen H.Generating Transition Probabilities for
Automatic Model—Based Test Generation[A].2010 Third In—
直线开关磁阻电机发电控制系统设计
2. 2
新型位置检测器设计 传统的直线电机位置检测器, 是在旋转电机
该系统由 LSRM、 功率变换器、 控制器、 检测 , 2 单元和原动机四部分组成 系统结构如图 所示。 2. 1 功率变换器设计
[11 ]
的光电式转子位置传感器基础上进行结构性改 即将旋转电机安装于转子的圆形齿盘沿圆周 变, 展开, 成为直线形齿条, 并将其放置于电机次级 边, 同时将光电传感器固定在初级上 , 通过它们间
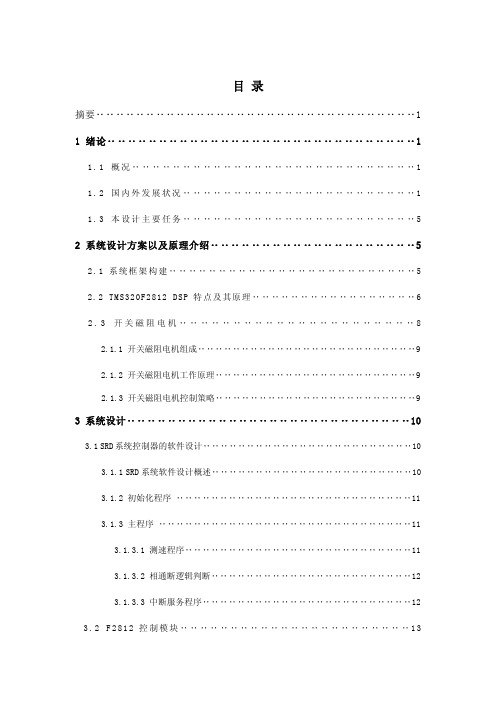
图5 系统控制器硬件结构示意图
图4
位置传感器安装示意图
101 , 001 , 011 , 010 , 110 ) , 的状态( 100 , 分别代表电 机三相绕组的不同参考位置。 位置检测器接口电路将传感器输出信号经过 两级 CD40106 施密特触发器整形后, 再经过高速 隔离光耦 6N137 进行隔离和电平转换后连接到 信号处理电路, 以提高系统的抗干扰性。 信号处 理电路对信号的处理分两路:一路送单片机的I / O 口判断导通逻辑, 同时另一路送单片机的高速输 HIS. 1 , HIS. 2 , 入口 HIS. 0 , 用于计算电机速度并 作为计算位置的参考。 2. 3 控制器设计 该系 统 控 制 器 选 用 了 Intel 80C196KB 和 STC12C5A60S2 单片机相互配合作为控制核心, 前者主要利用其高速输入、 输出口作为电机位置 信号的捕获和开关信号输出, 后者主要用来产生 PWM, 以及实现一些控制算法、 控制液晶显示和 键盘等。 系统控制器硬件结构示意图如图 5 所 示。
2011 , 38 ( 4 )
控制与应用技术EMCA
直线开关磁阻电机发电控制系统设计
宣 ( 中国矿业大学 信电学院, 江苏 徐州 221008 )
开关磁阻电机设计方法及软件的研究的开题报告
开关磁阻电机设计方法及软件的研究的开题报告一、选题背景:开关磁阻电机是一类新型、高效率、高可靠性的电机,在乘用车、工程机械、航空航天等领域有广泛应用。
由于其一些特殊的性能,例如响应速度快、在高速转矩范围内具有高效率和低的额定功率和低的失速转矩,使其在特定应用领域中成为一个有吸引力的替代方案。
但是其设计过程复杂且需要大量的实验验证,因此需要有效的设计方法和软件来支持设计。
二、选题目的:探究开关磁阻电机的设计方法及其软件的研究,在设计过程中捕捉其特殊属性,以适应其广泛的应用领域。
此外,本研究还将分析现有的设计方法和软件,并提出改进措施以提高设计效率和准确性。
三、研究内容:1.开关磁阻电机的原理和特性的分析。
2.开关磁阻电机的设计过程和方法研究。
3.开关磁阻电机设计软件的调研与分析。
4.在MATLAB环境中开发和验证开关磁阻电机的设计软件。
5.开关磁阻电机的仿真和实验验证。
四、研究意义:本研究通过对开关磁阻电机设计方法及其软件的研究,对于解决开关磁阻电机在实际应用过程中所面临的设计问题具有重要的理论和实际意义。
同时,本研究将开发出一款功能强大的开关磁阻电机设计软件,将可支持有关行业的设备和系统的设计人员提高工作效率和准确性,以更好地适应市场需求。
五、研究方法:本研究将运用理论分析、计算机模拟、软件开发和实验验证等方法,通过对开关磁阻电机的特点和设计方法、现有研究和软件的分析、设计软件和实验验证等,系统地研究开关磁阻电机的设计方法及其软件,探索出相应的解决方案与方法。
六、研究进度:第一年:1.收集和整理开关磁阻电机的相关文献和资料。
2.研究设计方法和现有的相关软件。
3.学习MATLAB的相关知识。
4.研究开发工具、仿真算法等。
5.开始开发开关磁阻电机设计软件的框架和基本模块。
第二年:1.完善开关磁阻电机设计软件的各模块。
2.对软件进行测试和分析,收集用户反馈。
3.分析实验结果和数据。
4.整理技术文档和发表相关学术论文。
基于XC167CI单片机的开关磁阻电机控制系统设计
软件 系统 设计 。 关键词 : 系统 ‘ 计 设 开关磁 阻 电机
Ab t a tTh sp p ri to u e RM o to y — s r c : i a e n r d c sa S c n r l s s t r a e n h g e f r a c 一 i M CU e b s d o i h p ro m n e 1 b t n 6 XC 6 CI 17
硬件 封锁 保护
图 1 系统 结 构框 图
l 善 l 动 萄 嚣
0
∞
驱
f 器
模 块
2 2位置检测单元 . 位 置传感 器 是开关 磁阻 电机 的关键 部件和 特
《 电机 技 术》2 0 年 第 4期 06 ・ 1’ 1
维普资讯
存储器、 数据 存 储 器 、 存器 、/ ) 一 编址 , 寄 I O口 统 5
m a e b n i e n a d d s rb s t e d sg h o y o s d y I fn o n e c i e h e i n t e r fi t
h r wa ea d S fwa e a d r n O t r . Ke wo d : se y r s Sy t m De i n S sg RM
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
开关磁阻电机控制系统软件设计
开关磁阻电机SRM(Switched Reluctance Motor)是随着电力电子、微电脑和控制技术的迅猛发展而出现的一种新型调速系统,具有结构简单、运行可靠及效率高等突出优点,成为交流、直流和无刷直流电动机调速系统强有力的竞争者,引起各国学者和企业的广泛关注。
1 基本控制策略
开关磁阻电机基本控制策略主要包括电流斩波控制(CCC)、电压PWM 控制、角度位置控制(APC)三种控制策略。
电流斩波控制的优点是可限制电流峰值的增长,保护开关器件的安全,并起到良好有效的调节效果,因此适用于低速调速系统。
当相电流超过约定的上限电流值时,则主开关关断,当相电流低于约定的下限电流值时,则组合开关开通,从而实现电流斩波控制效果。
电压PWM控制是通过调整占空比,来调节相绕组的平均电压,以改变相绕组电流的大小,从而实现转速和转矩的调节,电压PWM控制的特点是通过调节相绕组电压的平均值,进而能间接地限制和调节相电流,因此既能用于高速调速系统,又能用于低速调速系统,而且控制也较简单。
角度位置控制是指对开通角和关断角的控制。
它的实质就在于输入电压保持不变而通过改变主开关的开通角和关断角来调节电流,以达到调节电机转矩的目的。
角度控制的优点是转矩调节范围较大,可允许多相同时通电,以增加电机输出转矩,可实现效率最有控制和转矩
最优控制。
为了实现开关磁阻电机良好的调速性能,该软件设计采用以下组合控制策略,即电机基速以下运行时,采用电流斩波控制方式;在中低速下,采用电压PWM控制方式;而在高速运行时,采用角度位置控制方式。
2 软件设计
软件采用前后台系统作为软件框架,分为主程序和中断程序两部分,相较于现有控制系统软件设计中的多中断程序,该软件设计仅采用了一个定时中断,是程序更简洁,增加了程序的可读性及可移植性,同时也有利于程序的进一步扩充与完善。
现有控制系统软件中多数使用多中断设计,其中包括计算电机转速使用的捕获中断,获取电机位置使用一路或两路外部中断,电流采样时使用的DMA中断,以及一至两个定时中断,这些中断不仅增加了程序的复杂性,同时也降低了软件的可靠性。
在软件设计中,重点和难点就是如何获得较好的斩波效果,而软件设计的好坏直接影响了斩波效果的好坏。
在现有的软件设计中,一般是将各相电流通过ADC采样,再经DMA通道传输,同时产生一个DMA 中断,然后在一个定时中断(定时中断时间一般为50us至100us)中实现电流斩波。
而这种设计会产生两个问题。
其一,因为要实现其他功能,定时中断时间不能进一步缩短,而这对电流斩波而言,时间间隔又太长,以50us为例,电流可能会在50us的时间中上升40A。
其二,DMA中断优先级要高于定时中断,这可能会导致定时中断的执。