直线电机伺服电机计算工具(自动计算)
直线电机选型计算(自动计算版)

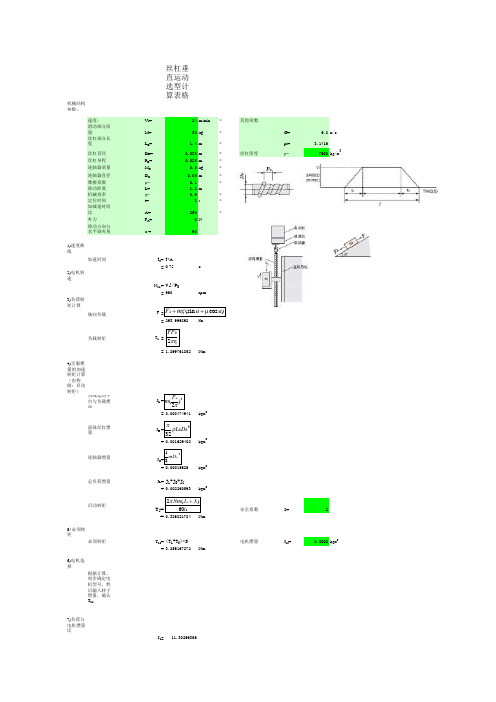
直线电机选型计算(⾃动计算版)①运⾏条件运⾏条件代号参数单位最⼤速度Vmax2m/s移动重量m5kg加速度a20m/s2加速时间Ta2s匀速时间Tc3s减速时间Td2s停⽌时间Tw2s摩擦⼒f10N外界应⼒σ0N安全系数µ 1.3②运⾏模式的选择㈡推⼒的计算①加速时推⼒Fa[N]的计算计算数值 Fa单位结果110N②匀速时推⼒Fc[N]的计算计算数值 Fc单位结果10N③减速时推⼒Fd[N]的计算计算数值 Fd单位结果90N④停滞时推⼒Fw[N]的计算计算数值 Fw单位结果0N⑤持续推⼒Frms[N]的计算计算数值 F`max 单位结果143.0N②马达所需连续推⼒需⼤于F`rms计算数值 F`rms 单位结果87.4N综上选择电机型号为㈣若选择串联①连续电流Irms[A]的计算计算数值 Irms 单位结果1.1A计算数值 Irms单位结果 1.8A③外部提供电压U[V]的计算计算数值 U单位结果176.2V 综上所选驱动器要求如下驱动器数值关系计算数值单位最⼤输出电压卍⼤于176.2V连续输出电流卍⼤于 1.1A最⼤输出电流卍⼤于 1.8A㈤若选择并联①连续电流Irms[A]的计算计算数值 Irms单位结果 2.1A计算数值 Irms单位结果 3.5A ③外部提供电压U[V]的计算计算数值 U单位结果87.96V 综上所选驱动器要求如下驱动器数值关系计算数值单位最⼤输出电压卍⼤于88.0V 连续输出电流卍⼤于 2.1A最⼤输出电流卍⼤于 3.5A。
伺服步进电机选型计算工具
= 1.299761852 Nm
G=
9.8 m/s
pi=
3.1416
ρ=
7900 kg/m3
JL
=
m(
PB 2
)2
= 0.000474941 kgm2
JB
=
32
LBDB4
= 0.001629402 kgm2
1 mDC2 JC= 8
= 0.00015625 kgm2
JL= JL+JB+JC = 0.002260593 kgm2
2 Nm(Jm Jl)
TS=
60t1
= 0.329821784 Nm
TM= (TL+TS)*S = 3.259167272 Nm
安全系数
S=
2
电机惯量
JM=
0.0002 kgm2
I1= 11.30296356
8)负荷与 减速机惯 量比 当负荷与 电机惯量 比>5时, 考虑采用 减速装 置,提高 惯量匹配
直线运动平 台与负载惯 量
滚珠丝杠惯 量
连轴器惯量
总负荷惯量
启动转矩
5)必须转 矩
必须转矩
6)电机选 择
根据计算, 初步确定电 机型号,然 后输入转子 惯量,确认 TM
7)负荷与 电机惯量 比
丝杠垂 直运动 选型计 算表格
Vl=
24 m/min *
其他常数
M=
30 kg
*
LB=
1.4 m
*
DB=
0.035 m
机械结构 参数:
速度: 滑动部分质 量 丝杠部分长 度 丝杠直径 丝杠导程 连轴器质量 连轴器直径 摩擦系数 移动距离 机械效率 定位时间 加减速时间 比 外力 移动方向与 水平轴夹角
直线电机参数计算详解

直线电机参数计算详解直线电机参数计算直线电机业专家------内最齐全的产品线-------上舜直线电机模组。
1.直线电机的选型包括最大推力和持续推力需求的计算以及加速度的相关计算。
2.最大推力由移动负载质量和最大加速度大小决定。
推力=总质量*加速度+摩擦力+外界应力例子:(假定摩擦力和外界应力忽略不计)当移动负载是2.5千克(包括动子),所需加速度为30m/s2时,那么电机将产生75N的力。
3.通常,我们不知道实际加速度需求。
但是,我们有直线电机运行时间要求。
给定运动行程距离和所需行程时间,便可以此计算出所需的加速度。
一般,对于短行程来说,我们推荐使用三角型速度模式(无匀速),长行程的话,梯形速度模式会更有效率。
在三角型速度模式中,电机的运动无匀速段。
4.三角模式,加速度为A = 4 * S/ T25.梯形模式,预设匀速度可以帮助决定加速度。
加速度=匀速/(运动时间--位移/匀速)6.相类似的,计算减速度大小与计算加速度相类似。
除非存在一个不平衡的力(重力)作用在直线电机上。
7.通常为了要维持匀速过程 (cruising)和停滞阶段 (dwelling),摩擦力和外界应力的施力也需要计算。
注:为了维持匀速,直线电机会对抗摩擦力和外界应力。
直线电机上伺服停滞时则会对抗外界应力。
8.计算持续推力公式如下:RMSForce=持续推力Fa = 加速度力Fc = 匀速段力Fd = 减速度力Fw =停滞力Ta = 加速时间Tc = 匀速时间Td = 减速时间Tw = 停滞时间9.根据最大推力和持续推力选择一个电机。
客户应该将安全系数设为20-30%以便将摩擦力和外界应力抵消为0,即总值正常应*1.3来保证安全性。
10.举个例子,一个应用中,直线电机需要在三角模式下让电机在0.2秒内,让4KG的负载移动0.3米。
直线电机在同行程中返程前停滞时间为0.15秒。
假设摩擦力和其他不平衡力不存在。
加速度=减速度=4*0.3、(0.2)^2=30m/s2最大推力=加速度力=减速度力=负载*加速度=4*30=120N持续推力=假如安全缓冲系数设为30%,通过选型,合适的直线电机电机就可以选出来了11.电机选型软件自动计算处理过程。
直线电机选型计算实例
直线电机选型计算实例直线电机是一种直线运动的电动机,它的工作原理与旋转电机类似,但是它的转子是直线型的,而且它的运动方向也是直线的。
直线电机具有结构简单、精度高、响应快等优点,因此在自动化生产线、半导体设备、医疗器械等领域得到广泛应用。
下面我们将通过一个选型计算实例来介绍直线电机的选型方法。
1. 确定负载参数在选型之前,首先需要确定直线电机所要驱动的负载参数,包括负载的质量、惯性、运动方式等。
例如,假设我们需要驱动一个质量为100kg的物体在水平方向上做往返直线运动,运动速度为1m/s,加速度为2m/s^2,运动距离为500mm。
2. 计算所需力矩根据负载参数,我们可以计算出所需的力矩。
在这个例子中,所需的力矩可以通过以下公式计算:T = m * a * L / 2其中,m为负载质量,a为加速度,L为运动距离。
代入参数可得:T = 100 * 2 * 0.5 = 100N·m3. 选择合适的直线电机型号在确定所需力矩后,我们需要选择合适的直线电机型号。
在选择时,需要考虑直线电机的最大力矩、最大速度、最大加速度等参数。
一般来说,直线电机的最大力矩应该大于所需的力矩,最大速度应该大于所需的运动速度,最大加速度应该大于所需的加速度。
假设我们选择了一款最大力矩为200N·m,最大速度为2m/s,最大加速度为4m/s^2的直线电机。
4. 计算所需电流和功率在确定直线电机型号后,我们需要计算所需的电流和功率。
电流可以通过以下公式计算:I = T / k其中,T为所需力矩,k为直线电机的力矩常数。
功率可以通过以下公式计算:P = F * v其中,F为所需的力,v为运动速度。
代入参数可得:I = 100 / 0.1 = 1000AP = 100 * 1 = 100W5. 确定驱动器和控制器在确定所需电流和功率后,我们需要选择合适的驱动器和控制器。
驱动器需要能够提供足够的电流和电压,控制器需要能够控制直线电机的运动速度和加速度。
直线电机选型计算表

名称符号单位数值负载质量ML 千克[Kg]10行程S 毫米[mm]300最大运动速度Vm 米/秒[m/s]1加速时间Ta 秒[sec]0.1匀速运动时间Tc 秒[sec]0.5减速时间Td 秒[sec]0.1停滞时间Tw 秒[sec]0.3名称符号单位数值连续推力F 牛顿[N]62峰值推力Fm 牛顿[N]146动子质量Mp 千克[Kg]0.5■运动时推力计算[N]F L =u(M L +M P )g+F n 2.029u :摩擦系数0.01g:重力加速度9.8[m/s 2]Fn :电缆拖链所耗推力1[N]■最大加速时间[s]0.095加速时间>最大K:安全系数1.3■加速推力计算[N]112.7759直线伺服电机选型计算方法1.确定运动要求选型流程2.确定电机参数3.参数验算()Lm m P L F F KV M M Ta -⨯⨯+=()L P L a F M M Ta VmF ++⨯=■减速推力计算[N]102.971■实际推力[N]2268.2031247.62566■选型推力[N]59.5320701连续推力>选型F X =F rms *K X K X :安全系数1.25()L P L d F M M Tc Vm F -+⨯=Tw Td Tc Ta T F T F T F F c d b L a a rms +++⨯+⨯+⨯=222√ 位移√ 运动时间√ 负载质量选型开始确定使用条件预选定计算最大加速时间加速时间> 最大加速时间计算实际推力连续推力> 选型推力选择完成。
cymex 精密齿轮箱、伺服电机工程计算选型软件

cymex 精密齿轮箱、伺服电机工程计算选型软件
佚名
【期刊名称】《《现代制造》》
【年(卷),期】2009(000)012
【摘要】Wittenstein公司的精密齿轮箱、伺服电机工程计算选型软件cymex 方便于工程师们的设计,提高工作效率,节省时间。
cymex 采取可视化窗口,下拉式菜单操作,界面友好。
软件具有通用模式、齿轮-齿条、丝杆、转台、传送带和皮带轮6种传动模式,7000多个电机,3000多个规格Wittenstein alpha齿轮箱,提供加速、匀速、减速以及复杂工况可供选择。
cymex 可自动创建2D、3D 图纸,生成创建文档,以文档、表格、图表形式提供计算选型报告,动态、直观地显示齿轮箱和电机运行状况。
【总页数】1页(P70)
【正文语种】中文
【中图分类】TP31
【相关文献】
1.精密点焊系统伺服电机的选型 [J], 邵兰娟;曹彪;陈世锋;范丰欣
2.基于伺服电机的齿轮箱传动精度检测系统 [J], 马天文;周建军;张亚平
3.Mathcad在工程计算中的应用--电机减速机选型计算实例 [J],
4.C3I系统工程计算机选型研讨 [J], 秦彦波
5.宁东供水工程计算机监控系统设备选型及配置 [J], 王桂胜;吴福雨;王金山
因版权原因,仅展示原文概要,查看原文内容请购买。
直线电机选型计算实例
直线电机选型计算实例以直线电机选型计算实例为例,本文将详细介绍直线电机选型的过程和计算方法,帮助读者了解直线电机选型的基本原理和步骤。
直线电机是一种将电能直接转换为机械能的装置,广泛应用于工业自动化、半导体生产设备、医疗器械等领域。
选型是指根据实际需求和工作条件,选择合适的直线电机型号和规格参数,以满足工作要求和性能指标。
直线电机选型的基本步骤如下:1. 确定工作负载:首先需要明确直线电机所需承载的负载类型和重量,包括静负载和动负载。
静负载是指直线电机在停止工作时所要承受的重量,动负载是指直线电机在运行时所要承受的重量。
根据工作负载的大小和特点,选择适合的直线电机类型。
2. 确定工作速度:根据实际工作需求,确定直线电机的运行速度。
速度是直线电机选型的重要参数,直线电机的速度范围通常在几毫米/秒到几米/秒之间。
根据工作速度要求,选择合适的直线电机型号和规格。
3. 确定工作行程:直线电机的行程是指直线电机能够移动的距离范围。
根据实际工作需求,确定直线电机的工作行程,以确定直线电机的尺寸和结构形式。
4. 确定工作精度:根据实际工作需求,确定直线电机的工作精度要求,包括位置精度、重复定位精度和运动平稳性等指标。
根据工作精度要求,选择合适的直线电机型号和控制系统。
5. 计算所需力矩:根据工作负载和工作速度,计算出直线电机所需的力矩。
力矩是直线电机选型的重要参数,直线电机的力矩范围通常在几牛米到几十牛米之间。
根据所需力矩,选择合适的直线电机型号和规格。
6. 选择合适的控制系统:根据工作要求和性能指标,选择合适的直线电机控制系统。
直线电机控制系统通常包括驱动器、编码器和控制器等组成部分。
根据实际需求和预算限制,选择合适的控制系统。
以上是直线电机选型的基本步骤和计算方法。
在实际应用中,还需要考虑其他因素,如环境条件、电源要求、可靠性和维护性等。
选型过程中,可以借助厂商提供的选型软件或咨询厂商的工程师,以获得更准确和可靠的选型结果。
伺服电机计算完整版
伺服电机计算完整版伺服电机是一种可以实现高精度运动控制的电机。
它采用了闭环控制系统,通过反馈信号不断调整输出,以实现对位置、速度和加速度的精确控制。
伺服电机在自动化控制、工业机械、机器人等领域有着广泛的应用。
伺服电机的运动控制可以通过数学模型来描述。
一般情况下,可以将伺服电机的运动控制建模为一个二阶系统。
在建立数学模型之前,需要了解一些关键参数,包括电机的转矩常数Kt、电机的动态阻尼比ζ、滤波器的角频率ωn以及PID控制器的增益参数Kp、Ki和Kd。
伺服电机的数学模型可以用以下差分方程来描述:Tm*(θm(k+1)-θm(k))/T=Kt*(Ti/R)*Vi(k)-Td*(θm(k)-θ(k))J*(θ(k+1)-2θm(k)+θ(k-1))/T^2=T*(θm(k+1)-θm(k))/T其中,Tm为电机的转矩,θm(k)为电机的角度,Vi(k)为控制输入,Ti和R分别为电机的转矩常数和电阻,Td为电机的动态阻尼比,J为负载的转动惯量,θ(k)为负载的角度,T为采样周期。
根据以上差分方程,可以推导得到伺服电机的传递函数:G(s)=(Kt*(Ti/R))/(J*s^2+(Td+J)*s+(Kt*(Ti/R)))可以根据传递函数来设计伺服电机的控制器。
一种常见的控制器设计方法是PID控制,它是通过对误差进行比例、积分和微分处理来调整输出。
PID控制器的输出可以表示为:U(s)=Kp*e(s)+Ki*1/s*e(s)+Kd*s*e(s)其中,U(s)为控制器的输出,Kp、Ki和Kd分别为比例、积分和微分增益参数,e(s)为误差信号,s为Laplace变换中的频率变量。
通过将传递函数和控制器的输出进行连接,可以得到整个系统的传递函数:T(s)=G(s)*U(s)=(Kt*(Ti/R))/(J*s^2+(Td+J)*s+(Kt*(Ti/R)))*(Kp*e(s)+Ki*1/s*e(s)+Kd*s*e(s))根据传递函数T(s),可以进行系统的频域和时域分析,以评估系统的稳定性和动态性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
直线电机选型 8 加速度要求 60 平台移动速度 1.5 单一性行程移动距离 10 移动平台质量 300 负载质量 0.2 导轨摩擦系数
旋转电机选 a(m/s*s) V(m/min) S(mm) Mt(kg) Mf(kg) μ η PB(mm) DB(mm) MB(kg)
勿动!!!
Fa=Fd Fv t1=t3 t2
3087.6 607.6 0.125 1.387 1.387
加减速阶段推力 匀速阶段推力 加减速时间 匀速运动时间 匀速距离(m)
计算结果,选择至少满足以下要求的直线电机 Fp(N) 3705.12 峰值推力(大于该值) Fc(N) 1595.911 有效推力(大于该值) Ke 250 反电势常数(小于该值) Ip(A) 勿超驱动 峰值电流 Ic(A) 器标称值 额定电流
Ja Jb N t1=t3 t2 TA TB TC
计算结果,选择至少满足以 r/min Tmax(Nm) Trmsx(Nm) Tf(Nm) JA(*10-4kg*m2) Ip(A) Ic(A)
橙色是需要填的数据,绿色为计算结果;其他表格的数据均为计算过程,勿动!!!
旋转电机选型 5 加速度要求 60 平台移动速度 1500 单一性行程移动距离 300 移动平台质量 0 负载质量 1 导轨摩擦系数 0.9 机械传动效率 20 导螺杆节距 50 导螺杆直径 0.64 导螺杆质量
速度mm/s 1000
30.4272 2 3000 0.2 1.32 5.656745 10.4034 -4.74665
工作台转动惯量 丝杆转动惯量 电机转速 加减速时间 匀速移动时间 加速扭矩 匀速扭矩(克服摩擦所需要的扭矩) 减速扭矩
计算结果,选择至少满足以下要求的旋转电机 30பைடு நூலகம்0 额定转速 19.27217 峰值扭矩(电机峰值扭矩大于该值) 9.45523 时效扭矩(电机额定扭矩大于该值) 20.80679 额定扭矩(电机额定扭矩大于该值) 6.48544 转子惯量(电子转子惯量大于该值) 勿超驱动 峰值电流 器标称值 额定电流