现代控制理论作业 一
现代控制理论大作业
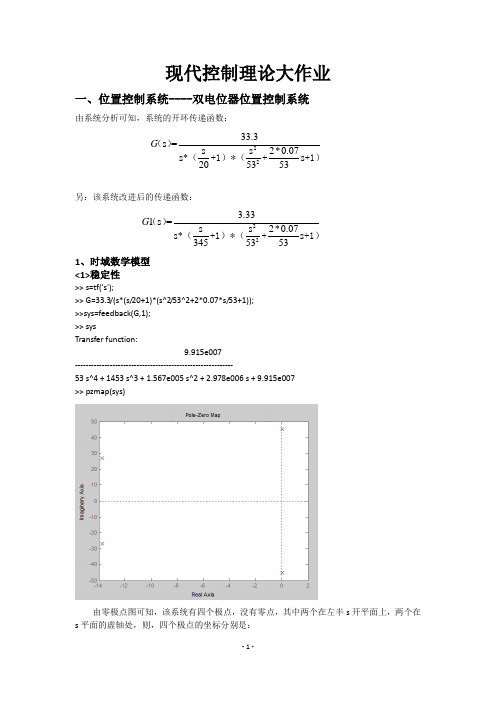
现代控制理论大作业一、位置控制系统----双电位器位置控制系统由系统分析可知,系统的开环传递函数:2233.3s =s s 2*0.07s*s 205353G()(+1)*(++1)另:该系统改进后的传递函数:223.331s =s s 2*0.07s*s 3455353G ()(+1)*(++1)1、时域数学模型<1>稳定性>> s=tf('s');>> G=33.3/(s*(s/20+1)*(s^2/53^2+2*0.07*s/53+1)); >>sys=feedback(G,1); >> sysTransfer function:9.915e007 -----------------------------------------------------------53 s^4 + 1453 s^3 + 1.567e005 s^2 + 2.978e006 s + 9.915e007>> pzmap(sys)由零极点图可知,该系统有四个极点,没有零点,其中两个在左半s 开平面上,两个在s 平面的虚轴处,则,四个极点的坐标分别是:>> p=pole(sys)p =0.0453 +45.2232i0.0453 -45.2232i-13.7553 +26.9359i-13.7553 -26.9359i系统的特征方程有的根中有两个处于s的右半平面,系统处于不稳定状态<2>稳态误差分析稳态误差分析只对稳定的系统有意义,系统(G)处于不稳定状态,所以不做分析。
改进后系统(G1)如下,求其特征方程的极点:>> s=tf('s');>> G1=3.33/(s*(s/345+1)*(s^2/53^2+2*0.07*s/53+1));>> sys2=feedback(G1,1);>>p=pole(sys2);p =1.0e+002 *-3.4492-0.0206 + 0.5258i-0.0206 - 0.5258i-0.0338可以看出,改进后的传递函数G1的四个极点都在s平面的右半开平面上,则系统G1是稳定的,故对此系统做稳态误差分析:由系统G1的开环传递函数在原点处有一个极点,故属于1型系统。
《现代控制理论》课后习题全部答案(最完整打印版)

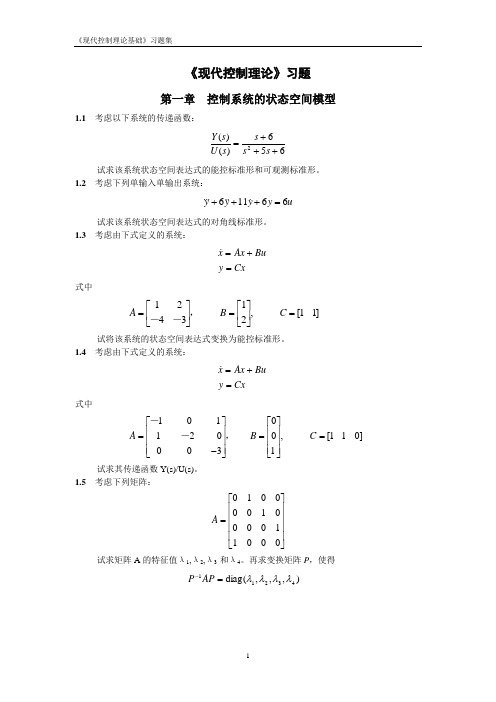
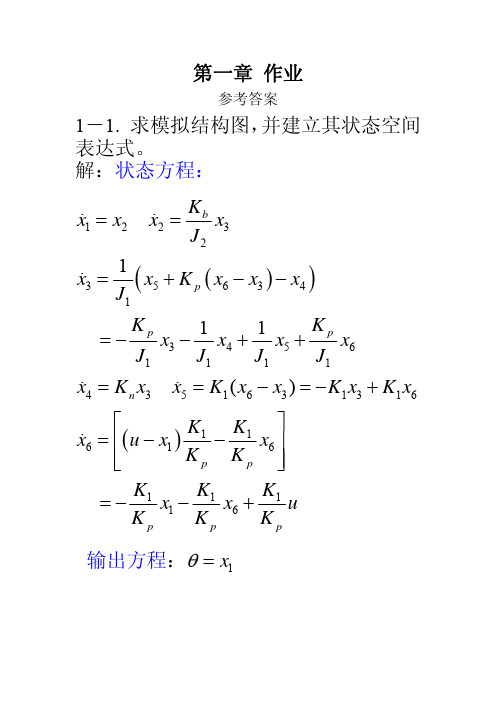
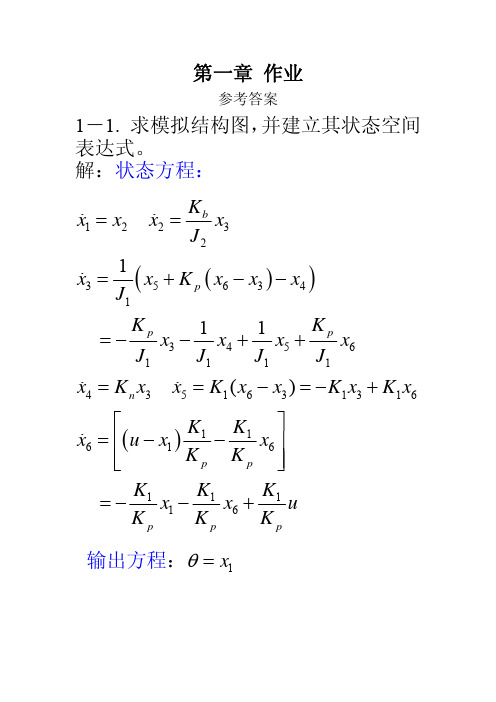
第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙阿令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CCL L R L L R x x x 。
现代控制理论习题集
求系统矩阵A。
2.7已知线性时变系统的系统矩阵如下,计算状态转移矩阵 。
1) ;2)
2.8给定系统 和其伴随方程 ,其状态转移矩阵分别用 和 表示,证明: 。
2.9求解下列系统的状态响应。
2.10已知如下离散时间系统, , 是从单位斜坡函数t采样得到的,求系统的状态响应。
6.5设系统状态方程及初始条件为:
中断状态受如下约束
试求最优控制是下列性能指标
取极小值,且求出最优轨线。
6.6设一阶离散系统方程为
边界条件为: 。试求最优控制序列,使下列性能指标
取极小值,并求出状态序列。
6.7设系统状态方程及边界条件为:
; ,
试求最优控制是指标 取极值,并求出最优轨线及最优性能指标。
试求该系统状态空间表达式的对角线标准形。
1.3考虑由下式定义的系统:
式中
试将该系统的状态空间表达式变换为能控标准形。
1.4考虑由下式定义的系统:
式中
试求其传递函数Y(s)/U(s)。
1.5考虑下列矩阵:
试求矩阵A的特征值λ1,λ2,λ3和λ4。再求变换矩阵P,使得
第二章
2.1用三种方法计算下列矩阵A的矩阵指数函数 。
5.7考虑习题4.8定义的系统。假设输出y是可以准确量测的。试设计一个最小阶观测器,该观测器矩阵所期望的特征值为 ,即最小阶观测器所期望的特征方程为 。
5.8给定线性定常系统
式中
假设该系统的结构与图4.5所示的相同。试设计一个全维状态观测器,该观测器的期望特征值为 。
5.9给定线性定常系统
该观测器增益矩阵的一组期望的特征值为 。试设计一个全维观测器。
2.11已知如下离散时间系统,试求 ,使系统能在第二个采样时刻转移到原点。
《现代控制理论》课后习题全部答案(最完整打印版)

《现代控制理论》课后习题全部答案(最完整打印版)第⼀章习题答案1-1试求图1-27系统的模拟结构图,并建⽴其状态空间表达式。
解:系统的模拟结构图如下:系统的状态⽅程如下:阿令,则所以,系统的状态空间表达式及输出⽅程表达式为状态变量的状态⽅程,和以电阻上的电压作为输出量的输出⽅程。
解:由图,令,输出量有电路原理可知:既得写成⽮量矩阵形式为:1-4两输⼊,,两输出,的系统,其模拟结构图如图1-30所⽰,试求其状态空间表达式和传递函数阵。
解:系统的状态空间表达式如下所⽰:1-5系统的动态特性由下列微分⽅程描述列写其相应的状态空间表达式,并画出相应的模拟结构图。
解:令,则有相应的模拟结构图如下:1-6(2)已知系统传递函数,试求出系统的约旦标准型的实现,并画出相应的模拟结构图解:1-7给定下列状态空间表达式(1)画出其模拟结构图(2)求系统的传递函数解:(2)1-8求下列矩阵的特征⽮量(3)解:A的特征⽅程解之得:当时,解得:令得(或令,得)当时,解得:令得(或令,得)当时,解得:令得1-9将下列状态空间表达式化成约旦标准型(并联分解)(2)解:A的特征⽅程当时,解之得令得当时,解之得令得当时,解之得令得约旦标准型1-10已知两系统的传递函数分别为W1(s)和W2(s)试求两⼦系统串联联结和并联连接时,系统的传递函数阵,并讨论所得结果解:(1)串联联结(2)并联联结1-11(第3版教材)已知如图1-22所⽰的系统,其中⼦系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-11(第2版教材)已知如图1-22所⽰的系统,其中⼦系统1、2的传递函数阵分别为求系统的闭环传递函数解:1-12已知差分⽅程为试将其⽤离散状态空间表达式表⽰,并使驱动函数u的系数b(即控制列阵)为(1)解法1:解法2:求T,使得得所以所以,状态空间表达式为第⼆章习题答案2-4⽤三种⽅法计算以下矩阵指数函数。
(2)A=解:第⼀种⽅法:令则,即。
《现代控制理论》课后习题答案1.pdf

《现代控制理论》第一章习题解答1.1 线性定常系统和线性时变系统的区别何在? 答:线性系统的状态空间模型为:xAx Bu y Cx Du=+=+线性定常系统和线性时变系统的区别在于:对于线性定常系统,上述状态空间模型中的系数矩阵A ,B ,C 和中的各分量均为常数,而对线性时变系统,其系数矩阵D A ,B ,C 和中有时变的元素。
线性定常系统在物理上代表结构和参数都不随时间变化的一类系统,而线性时变系统的参数则随时间的变化而变化。
D 1.2 现代控制理论中的状态空间模型与经典控制理论中的传递函数有什么区别? 答: 传递函数模型与状态空间模型的主要区别如下:传递函数模型(经典控制理论)状态空间模型(现代控制理论) 仅适用于线性定常系统 适用于线性、非线性和时变系统用于系统的外部描述 用于系统的内部描述基于频域分析基于时域分析1.3 线性系统的状态空间模型有哪几种标准形式?它们分别具有什么特点?答: 线性系统的状态空间模型标准形式有能控标准型、能观标准型和对角线标准型。
对于阶传递函数n 1212101110()n n n n n n n b s b s b s b G s d s a s a s a −−−−−−++++=+++++"",分别有[]012101210100000100000101n n n xx ua a a a yb b b b x du−−−⎧⎡⎤⎪⎢⎥⎪⎢⎥⎪⎢⎥=+⎪⎢⎥⎨⎢⎥⎪⎢⎥⎪−−−−⎣⎦⎪=+⎪⎩"" ###%##"""⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⑴ 能控标准型:[]0011221100010********001n n n b a b a xa x ub a b y xdu −−−⎧−⎡⎤⎡⎤⎪⎢⎥⎢⎥−⎪⎢⎥⎢⎥⎪⎢⎥⎢⎥=−+⎪⎢⎥⎢⎥⎨⎢⎥⎢⎥⎪⎢⎥⎢⎥⎪−⎣⎦⎣⎦⎪=+⎪⎩"" "######""⑵ 能观标准型:[]1212001001001n n p p x x up y c c c x du⎧⎡⎤⎡⎤⎪⎢⎥⎢⎥⎪⎢⎥⎢⎥=+⎪⎢⎥⎢⎥⎨⎢⎥⎢⎥⎪⎣⎦⎣⎦⎪⎪=+⎩"" ##%##""⑶ 对角线标准型: 式中的和可由下式给出,12,,,n p p p "12,,,n c c c "12121012111012()n n n n n n n n nb s b s b s bc c c G sd d s a s a s a s p s p s p −−−−−−++++=+=++++++−−−"""++能控标准型的特点:状态矩阵的最后一行由传递函数的分母多项式系数确定,其余部分具有特定结构,输出矩阵依赖于分子多项式系数,输入矩阵中的元素除了最后一个元素是1外,其余全为0。
《现代控制理论》第三版_.习题答案
K1
0 0 K1
K p
B 0 0 0 0 0
K1
T
K p
C 1 0 0 0 0 0;
1-3.
图
1-29
机械系统。M1
M
受外力
2
作用 f1 f2作用,求M1 M 2运动速度输出的
状态空间表达式。
解:微分方程 M1 y1 f1 K1(c1 c2 ) B1( y1 y2 )
M 2 y2 f2 K2c2 B2 y2 K1(c1 c2 ) B1( y1 y2 )
第一章 作业
参考答案
1-1. 求模拟结构图,并建立其状态空间 表达式。 解:状态方程:
x1 x2
x2
Kb J2
x3
x3
1 J1
x5 K p x6 x3 x4
Kp J1
x3
1 J1
x4
1 J1
x5
Kp J1
x6
x4 Kn x3 x5 K1(x6 x3 ) K1x3 K1x6
x 6
设状态变量 x = c1 c2 y1 y2 T
y y1 y2 T ,u f1 f2 T
令 x1 c1, x2 c2, x3 y1, x4 y2
x1 x3 x2 x4
x3
K1 M1
x1
K1 M1
x2
B1 M1
x3
B1 M1
x4
1 M1
f1
x4
K1 M2
x1
K1 K2 M2
第二章 作业
参考答案
2-4. 用三种方法计算eAt (定义法,约 当标准型,拉氏反变换,凯莱哈密顿)
(1)
A
0 4
1 0
直接法(不提倡使用,除非针对一些特
《现代控制理论》第三版_.习题答案
1 0 0 3 1 0 5 2 1 52 7 1 5 2 70 125 3 5 7 5 0 0 1 1 B 2 ; 2 5 5
1 0 a1 0 0 1 0 1 0 0 1 a2 3 7 5
0 B 0 1
C (b0 a0bn ) (bn1 an1bn ) 2 1 0
3 1 a 或者 2 2 1 a1 0 a0
e At I At 1 22 1 33 A t A t 2! 3! t2 t4 t6 t3 t5 1 4 16 64 , 4 16 t 2! 4! 6! 3! 5! 3 5 2 4 6 t t t t t t 4 16 64 , 1 4 16 64 3! 5! 2! 4! 6!
0 0 1 B M 1 0 0 0 0 1 M2
1 0 B 1 M1 B1 M2
1 B1 M1 B1 B2 M2
0
0 0 1 0 C 0 0 0 1
1-5. 根据微分方程, 写状态方程, 画模 拟结构图。
1 a2 a2 2 a1 3 2 a a a 1 2 2 a0
1 a2 a1
1 a2
12 b1 b0
b3 b 2 b1 1 b0
凯莱哈密顿法: 1,2 2 j
0 (t ) 1 1 e1t 1 2(e 2 jt e 2 jt ) (t ) 1 2t 4 2 jt 2 jt e j ( e e ) 2 1
现代控制理论习题解答(第一章)

g
题 1-3 图 2
Y2 (s)
3
U (s)
K1
x6
x6
T1 1
T1
K2
x4
x4
T2 1
K3 x2
x2 1 T4
T2
x3
x3
x5
x5
K5
T5
1 T5
写成矩阵的形式得:
题 1-3 图 3
x 1
=− 1 T4
x1
+
1 T4
x2
x2 = K 3 (x4 − x3 )
x3 = x2
x 4
1⎤
R 2 C1 −1
R2C2
⎥ ⎥ ⎥
⎡ ⎢ ⎣
x1 x2
⎥⎦
⎤ ⎥ ⎦
+
⎡ ⎢ ⎢ ⎣
1
R1C1 0
⎤ ⎥⎥u i ⎦
y = u0 = [0
1]⎢⎡
⎣
x1 x2
⎤ ⎥ ⎦
(2)
设状态变量: x1 = iL 、 x2 = uc 而
1
根据基尔霍夫定律得: 整理得
•
iL = C uc
•
ui = R ⋅ iL + LiL + uc
(4) G(s)
=
s3
s2 + 2s + 3 + 3s 2 + 3s + 1
【解】: 此题多解,一般可以写成能控标准型、能观标准型或对角标准型,以下解法供参考。 (1)
⎡0 1
x
=
⎢ ⎢
0
0
⎢⎣− 6 −11
y = [1 1 1]x
0 ⎤ ⎡0⎤
1
⎥ ⎥
x
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、 已知下列系统模型,试用MATLAB 将其转换成其它三种形式的模型:1、题中给出的是系统函数的多项式型函数,需将它转换成状态空间型、零极点型和极点留数型。
(1) 多项式型转换到状态空间。
matlab 中提供的多项式到状态空间转换函数及其调用格式如下:[A,B,C,D]=tf2ss(b,a)所以转换程序为:b=[1,0,2,-2];a=[1,2,-1,-2]; [A,B,C,D]=tf2ss(b,a);g_ss=ss(A,B,C,D) 程序运行之后结果如图1所示:图1所以其状态空间模型为:A=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-010001212 B=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡001 C=[]032-D=[](2) 多项式型转换成零极点型matlab 中提供的多项式到零极点转换函数及其调用格式如下:[z,p,k]=tf2zp(b,a)所以转换程序为:b=[1,0,2,-2];a=[1,2,-1,-2];[z,p,k]=tf2zp(b,a);sys=zpk([z],[p],[k]) 程序运行之后结果如图2所示:2222)(233--+-+=s s s s s s H图2所以其零极点模型为:)2)(1s )(1-()594.27709.0()7709.0s (2++++-s s s s(3)多项式转换成极点留数型matlab 中提供的多项式到极点留数转换函数及其调用格式如下:[r,p,k]=residue(b,a)所以转换程序为:b=[1,0,2,-2];a=[1,2,-1,-2];[r,p,k]=residue(b,a)程序运行之后结果如下所示:所以其极点留数型模型为:115.211667.02s 6667.4-r +-+++++-s r s r2、⎥⎦⎤⎢⎣⎡--=6221A ,⎥⎦⎤⎢⎣⎡-=23B ,[]21=C ,]0[=D题中给出的是系统函数的状态空间模型,需将它转换成多项式型、零极点型和极点留数型。
(1)状态空间转换成多项式型matlab 中提供的状态空间到多下多项式转换函数及其调用格式如下:[b,a]=ss2tf(A,B,C,D)所以转换程序为:A=[1 2; -2 -6];B=[-3;2];C=[1 2];D=[0];[b,a]=ss2tf(A,B,C,D);sys=tf(b,a) 程序运行之后结果如下所示:所以其多项式模型为256s 2-+-s s :(2)状态空间转换成零极点型:matlab 中提供的状态空间到零极点型转换函数及其调用格式如下:[z,p,k]=ss2zp(A,B,C,D)所以转换程序为:A=[1 2; -2 -6];B=[-3;2];C=[1 2];D=[0];[z,p,k]=ss2zp(A,B,C,D); sys=zpk([z],[p],[k]) 程序运行之后结果如下所示:(3)状态空间转换成极点留数型:先将状态空间转换成多项式型,再将多项式型转换成极点留数型。
第一步已经得出该系统的多项式型模型为:256s 2-+-s s,将它转换成极点留数型程序为:A=[1 2; -2 -6];B=[-3;2];C=[1 2];D=[0];[b,a]=ss2tf(A,B,C,D); [r,p,k]=residue(b,a)程序运行之后结果如下所示:所以系统极点留数模型为:3723.09797.03723.5s 9797.1r +-+-+s r3、题中给出的是系统函数的零极点模型,需将它转换成多项式型、状态空间和极点留数型。
(1) 零极点型转换成多项式型matlab 中提供的零极点到多项式型转换函数及其调用格式如下:[b,a]=zp2tf(z,p,k)所以转换程序为:z=[2];p=[0,-1,-1,-1];k=[1];[b,a]=zp2tf(z,p,k);sys=tf(b,a)程序运行之后得出多项式型模型如下所示:(2) 零极点转换成状态空间matlab 中提供的零极点到状态空间型转换函数及其调用格式如下:[A,B,C,D]=zp2ss(z,p,k)3)1(2)(+-=s s s s H所以转换程序为:z=[2];p=[0,-1,-1,-1];k=[1];[A,B,C,D]=zp2ss(z,p,k);g_ss=ss(A,B,C,D) 程序运行之后结果如下所示:所以其状态空间模型为:A=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡01001-2-2-100010001- B=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡0001 C=[]1000D=[](3) 零极点转换成极点留数型需先将零极点转换成多项式型,再将多项式型转换成极点留数型,转换程序如下:z=[2];p=[0,-1,-1,-1];k=[1];[b,a]=zp2tf(z,p,k);[r,p,k]=residue(b,a) 程序运行之后结果如下所示:r = 2.0000 2.0000 3.0000 -2.0000p = -1.0000 -1.0000 -1.0000 0k = []所以系统极点留数型模型为:ss r s r s r H 2r 1-31212)s (-+++-++-+=二、状态方程的解1、 设系统的微分方程为: (a) 写出系统的状态方程和输出方程。
(b) 若输入信号)(5)(f t t e t ε-=,初始状态1)0()0()0(321===x x x ,试求状态变量)(),(),(321t x t x t x 和输出y(t)的零输入响应、零状态响应和全响应。
(a)首先将微分方程装换多项式型传递函数,再将其转换成成状态空间模型,转换程序如下:num=[4 10];den=[1 8 19 12];sys1=tf(num,den)sys=ss(sys1)程序运行后结果如下: a = x1 x2 x3 x1 -8 -4.75 -1.5 x2 4 0 0 x3 0 2 0b = u1 x1 2 x2 0 x3 0c = x1 x2 x3 y1 0 0.5 0.625d = u1 y1 0所以其状态方程为:f x x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡0020200045.175.48x 321 输出方程为:x y ]625.05.00[= (b)在MATLAB 环境下编写以下程序:t=0:0.01:15;A=[-8 -4.75 -1.5;4 0 0;0 2 0]; B=[2;0;0];C=[0 0.5 0.525];D=[0]; zi=[1 1 1]; %初始条件 f=5*exp(-t); sys=ss(A,B,C,D)[y,t,x]=lsim(sys,f,t,zi) %计算全响应 f=zeros(1,length(t)); %零输入为零 yzi=lsim(sys,f,t,zi); %计算零输入响应)(10)(4)(12)(19)(8)(t f t f t y t y t y t y +'=+'+''+'''f=5*exp(-t);zi=[0 0 0]; %令初始条件为零yzs=lsim(sys,f,t,zi); %计算零状态响应figure(1)plot(t,x(:,1),'-',t,x(:,2),'-.',t,x(:,3),'-..','linewidth',2)legend('x(1)','x(2)','x(3)') %显示图例title('状态变量波形')xlabel('t(sec)')figure(2)plot(t,y,'-',t,yzi,'-',t,yzs,':','linewidth',2)legend('y','yzi','yzs')title('系统响应,零输入相应,零状态响应')xlabel('t,(sec)')程序运行后结果如下:状态变量波形t(sec)图1 初始状态下状态变量波形图2 输出y(t)的零输入响应、零状态响应和全响应曲线2、设系统函数为(a) 写出系统的状态方程和输出方程(b) 若输入信号)(e 3)()(f2t t t e t t εε-+-=,初始状态1)0(1=x 0)0(2=x ,1)0(3=x ,2)0(4=x 试求状态变量)(),(),(321t x t x t x ,)(4t x 和输出y(t)的零输入响应、零状态响应和全响应。
(a)首先将零极点型换成状态空间模型,转换程序如下:z=[2];p=[0,-1,-1,-1];k=[1];[A,B,C,D]=zp2ss(z,p,k)程序运行后结果如下:A = -1 0 0 0 1 0 0 0 1 -2 -2 -1 0 0 1 0B = 1 0 0 0C =0 0 0 1 D = 000.511.522.5t,(sec)系统响应,零输入相应,零状态响应3)1(2)(+-=s s s s H所以系统状态方程为:u x x x x ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡00010100122100010001x 4321 输出方程为:[]x y 1000= (b)在MATLAB 环境下编写以下程序:t=0:0.01:15;A=[-1 0 0 0;1 0 0 0;1 -2 -2 -1;0 0 1 0]; B=[1;0;0;0];C=[0 0 0 1];D=[0]; zi=[1 0 1 2]; %初始条件 f=exp(-t)+3*exp(-2*t); sys=ss(A,B,C,D)[y,t,x]=lsim(sys,f,t,zi) %计算全响应 f=zeros(1,length(t)); %零输入为零 yzi=lsim(sys,f,t,zi); %计算零输入响应 f=exp(-t)+3*exp(-2*t);zi=[0 0 0 0]; %令初始条件为零 yzs=lsim(sys,f,t,zi); %计算零状态响应 figure(1)plot(t,x(:,1),'-',t,x(:,2),'-.',t,x(:,3),'--',t,x(:,4),':','linewidth',2) legend('x(1)','x(2)','x(3)','x(4)') %显示图例 title('状态变量波形') xlabel('t(sec)') figure(2)plot(t,y,'-',t,yzi,'-',t,yzs,':','linewidth',2) legend('y','yzi','yzs')title('系统响应,零输入相应,零状态响应') xlabel('t,(sec)')程序运行之后得出以下结果:图3 初始状态下状态变量波形图2 输出y(t)的零输入响应、零状态响应和全响应曲线-8-6-4-2024t(sec)状态变量波形-8-6-4-2024t,(sec)系统响应,零输入相应,零状态响应。