附和导线计算
导线测量—附合导线测量的内业计算(水利水电工程测量课件)

CD 603644 603801 1 17
f CD
60 6 147
f 容 60 n
12560627
坐标方位角
5
2364428
2110753
1002711
二、附合导线坐标计算
点号
1
A
B
1
2
3
4
C
D
坐标
方位角
5
距离
m
6
2110753
1002711
125.36
107.31
64.81
107.27
64.83
98.76
144.63
17.92
30.88
97.12
97.10
141.29
17.89
30.92
= 4 + 180° −
′
= +6 × 180°
− 测
二、附合导线坐标计算
写成一般公式为:
式中
′
终
= 始 + × 180° − 测
始 ——起始边的坐标方位角
′
终
——终边的推算坐标方位角
若观测左角,则
′
终
= 始 + × 180° + 测
坐标值
点
m ∆x/m ∆y/m ∆x/m ∆y/m x/m y/m 号
6
7
8
9
10
11
12 13
125.36
98.76
144.63
116.44
156.25
603801
A
1536.86 837.54 B
(完整word版)附和导线计算例题
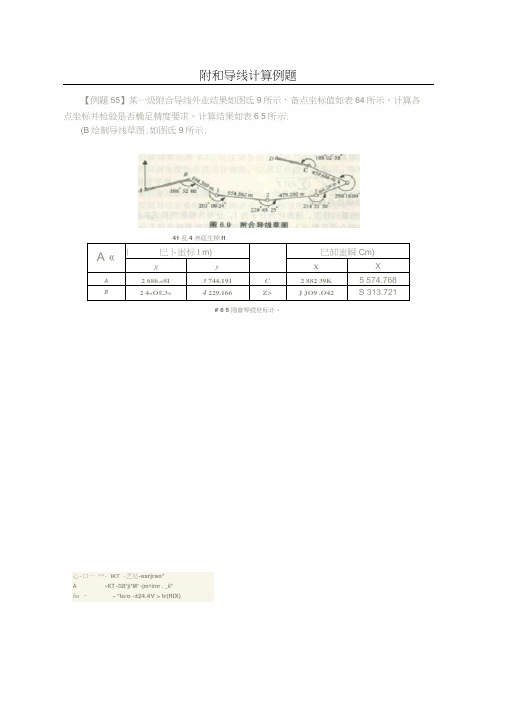
附和导线计算例题【例題55】某一级附合导线外业结果如图氐9所示,备点坐标值如表64所示,计算各点坐标并检验是否橋足精度要求。
计算结果如表6 5所示.(B绘制导线草图.如图氐9所示.41乱4 养底生棹ftA «| 巳卜蚩标I m)巳卸蚩瞬Cm)X y X XA 2 686.«8I3 744.191C 2 882 39K 5 574.768B 2 4«O£.3»4 229.166Z>J JO9 .O42S 313.721# 6 5 刚會琴続世标计・心-口亠 **- IKT -艺处-ssrjrao*A «KT -32t*ji*M* -jm^irnr . _ii*fm ・- *lo/o -±24.4V > tr(ftIX)^ctan 4 229 166 - 3 744J91 2 808.333-2 686.681(3) 角度囲合差计算。
a CD ~ o AB ♦ 〃 x 180° —》B 右=75°55'06”+6“80°— 1 187。
23'46" = 328°31'20"/> 二a'cD-as = 328°31 r 20rr - 328°3138 = - 18rr(4) 角度闭合差限差。
按一级导线〃限=±10酱=±10^ = ±24.49" >18”合格(5) 改正后角值。
V/i = +# /巾=—3"0改=0胡+巾p B = 106。
5290”一3"=106。
51・57”0\ = 203。
00‘24"3" = 203°00r 21" pc = 188说5旷一 3" = 188。
0255”(6) 推算方位角。
附合导线平差计算过程说明
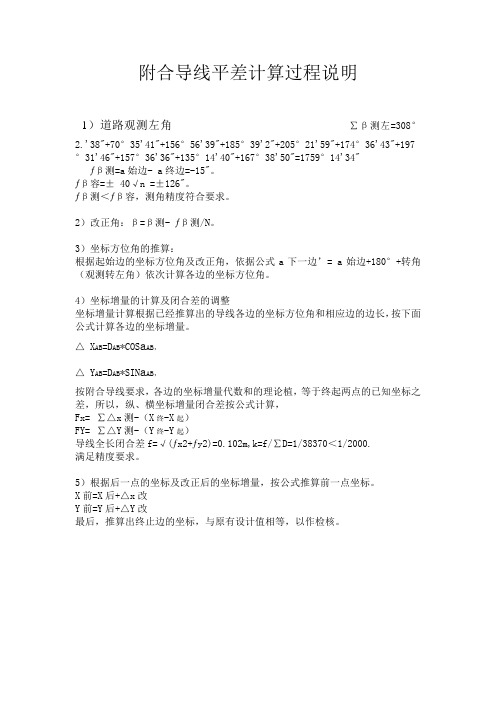
附合导线平差计算过程说明1)道路观测左角∑β测左=308°2.'38"+70°35'41"+156°56'39"+185°39'2"+205°21'59"+174°36'43"+197°31'46"+157°36'36"+135°14'40"+167°38'50"=1759°14'34"ƒβ测=a始边- a终边=-15"。
ƒβ容=± 40√n =±126"。
ƒβ测<ƒβ容,测角精度符合要求。
2)改正角:β=β测- ƒβ测/N。
3)坐标方位角的推算:根据起始边的坐标方位角及改正角,依据公式a下一边’= a始边+180°+转角(观测转左角)依次计算各边的坐标方位角。
4)坐标增量的计算及闭合差的调整坐标增量计算根据已经推算出的导线各边的坐标方位角和相应边的边长,按下面公式计算各边的坐标增量。
△ X AB=D AB*COS a AB,△ Y AB=D AB*SIN a AB,按附合导线要求,各边的坐标增量代数和的理论植,等于终起两点的已知坐标之差,所以,纵、横坐标增量闭合差按公式计算,Fx=∑△x测-(X终-X起)FY=∑△Y测-(Y终-Y起)导线全长闭合差f=√(ƒx2+ƒy2)=0.102m,k=f/∑D=1/38370<1/2000.满足精度要求。
5)根据后一点的坐标及改正后的坐标增量,按公式推算前一点坐标。
X前=X后+△x改Y前=Y后+△Y改最后,推算出终止边的坐标,与原有设计值相等,以作检核。
附合导线计算
附合导线计算(实用版)目录1.附合导线计算的概述2.附合导线计算的基本原理3.附合导线计算的方法和步骤4.附合导线计算的应用案例5.附合导线计算的优缺点分析正文附合导线计算是一种在电气工程领域中广泛应用的计算方法,主要用于确定电气设备中的导线长度、截面积等参数。
在电气设备的运行过程中,导线的损耗和发热量会对设备的性能产生重要影响,因此,进行附合导线计算具有重要的实际意义。
附合导线计算的基本原理是根据电气设备的工作电压、工作电流以及导线的电阻率等因素,计算出导线的电阻值。
然后,通过欧姆定律,可以进一步计算出导线的长度和截面积。
进行附合导线计算的方法和步骤主要包括以下几个方面:1.确定电气设备的工作电压和工作电流。
这些参数通常可以从设备的技术参数中获得。
2.确定导线的电阻率。
导线的电阻率通常由导线的材料决定,例如,铜的电阻率为 1.68×10^-8 Ω·m,铝的电阻率为 2.82×10^-8 Ω·m。
3.根据欧姆定律,计算出导线的电阻值。
电阻值等于工作电压除以工作电流。
4.根据导线的电阻值和电阻率,计算出导线的长度。
导线的长度等于电阻值除以电阻率。
5.根据导线的长度和电流,计算出导线的截面积。
导线的截面积等于导线的长度乘以电流除以电阻率。
附合导线计算在电气工程中有广泛的应用,例如,在设计电气设备时,可以通过附合导线计算确定导线的参数,以确保设备的性能和安全性。
此外,在设备的运行和维护过程中,也可以通过附合导线计算对设备的性能进行评估和分析。
尽管附合导线计算具有很多优点,例如,计算方法简单、结果准确等,但也存在一些缺点,例如,计算过程中需要假设导线的电阻率为常数,这在实际应用中可能存在一定的误差。
附合导线计算方法
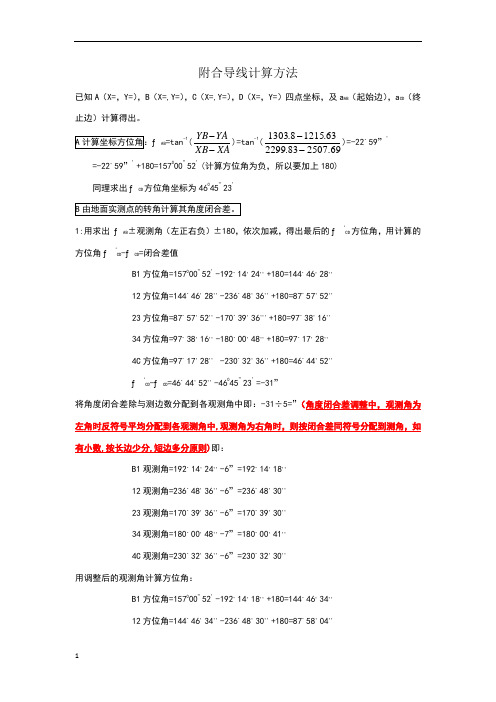
附合导线计算方法已知A (X=,Y=),B (X=,Y=),C (X=,Y=),D (X=,Y=)四点坐标,及a AB (起始边),a CD (终止边)计算得出。
ƒAB =tan -1(XA XB YA YB --)=tan -1(2507.6983.229963.12158.1303--)=-22。
59”’ =-22。
59”’+180=157000”52’(计算方位角为负,所以要加上180)同理求出ƒCD 方位角坐标为46045”23’1:用求出 ƒAB ±观测角(左正右负)±180,依次加减,得出最后的ƒ‘CD 方位角,用计算的方位角ƒ‘CD -ƒCD =闭合差值B1方位角=157000”52’-192。
14,24,,+180=144。
46,28,,12方位角=144。
46,28,,-236。
48,36,,+180=87。
57,52,,23方位角=87。
57,52,,-170。
39,36,,,+180=97。
38,16,, 34方位角=97。
38,16,,-180。
00,48,,+180=97。
17,28,,4C 方位角=97。
17,28,, -230。
32,36,,+180=46。
44,52,,ƒ‘CD -ƒCD =46。
44,52,,-46045”23’=-31” 将角度闭合差除与测边数分配到各观测角中即:-31÷5=”(角度闭合差调整中,观测角为左角时反符号平均分配到各观测角中,观测角为右角时,则按闭合差同符号分配到测角,如有小数,按长边少分,短边多分原则)即:B1观测角=192。
14,24,,-6”=192。
14,18,,12观测角=236。
48,36,,-6”=236。
48,30,,23观测角=170。
39,36,,-6”=170。
39,30,,34观测角=180。
00,48,,-7”=180。
00,41,,4C 观测角=230。
32,36,,-6”=230。
附和导线内业计算

检核条件:
x理 xC xB y理 yC yB
(9)计算各导线点旳坐标值:
xi xi1 xi改 yi yi1 yi改
依次计算各导线点坐标,最终推算出旳终 点C旳坐标,应和C点已知坐标相同。
例:
2053648
B 1
2904054
xB 1536.86m yB 873.54m
A AB 2364428
(用改正后旳β改)
前
后
180
左 右
计算出旳
终
终
, 不然,需重算。
(5)计算坐标增量ΔX、ΔY:
X i Di cosi
Yi Di sini
(6)计算坐标增量闭合差:
f x x (x终 x始 ) f y y ( y终 y始 )
因为f x , f y旳存在,使导线不能和CD连接,存
CD AB 6 180 理
即:
f
左 右
( 始
终) n 180
检核: f f允 (各级导线旳限差见规范)
(2)闭合差分配(计算角度改正数) :
Vi f / n
式中:n —涉及连接角在内旳导线转折角数
(3)计算改正后旳角度β改:
改 测 Vi
计算检核条件: Vi f
(4)推算各边旳坐标方位角α:
计 算
f 容 60 6 147
f x 0.19
f y 0.11
f
f
2 x
f
2 y
0.22
K 0.22 1 641.44 2900
K容
1 2000
返回
77 40 16 114.63
-13 167 21 43 90 18 33 116.44
-13 175 31 12 -13 214 09 20
附合导线角度闭合差计算公式
附合导线角度闭合差计算公式
高差闭合差可以定义为:在控制测量中,实测高差的总和与理论高差的总和之间的差值,表示为:fh=∑h测-∑h理。
在外业时,可用该公式检验外业的质量,判断是否结束外业。
三种水准路线计算高差闭合差所用的公式如下:
滑动水准路线、支水准路线:fh=∑a-∑b。
附合水准路线:fh=∑a-∑b-(h始-h终)。
以上公式比较抽象化,若并使高差滑动高这一概念抽象化,必须从高差的概念抓起,对公式进一步推论:
fh=∑h测-∑h理=(h终测-h始)-(h终理-h始)=h终测-h终理。
从公式可以窥见,高差滑动高就是终点的量测高程与终点的理论高程的差值。
在高差闭合差的计算中:计算的高差闭合差要和容许值相比,若超出容许范围,则应返工重新测量每个测站的高差,在不超出容许值的情况下才可进行下一步骤—闭合差的调整。
如:fh=-10mm小于fh容=8.26mm。
在滑动高的调整中:推论最后一个废止数与否与排序的高差滑动高大小成正比、符号恰好相反,否则不容许展开废止后的高程排序。
例如:最后一个废止数0.m,与高差滑动差fh=-0.m大小成正比、符号恰好相反。
在高程的计算中:判断改正后的终点高程是否等于理论值。
如:改正后的终点高程为.m,它等于终点6号点的已知高程. m,从而判断平差结果正确。
闭合及附合导线测量内业计算方法

闭合及附合导线测量内业计算方法(好东西)1. 导线方位角计算公式当β为左角时α前=α后+β左—180°当β为右角时α前=α后-β右+180°2. 角度闭合差计算fβ=(α始—α终)+∑β左—n*180°fβ=(α始-α终)-∑β右+n*180°3. 观测角改正数计算公式Vβ=±fβ/ n若观察角为左角,应以与闭合差相反的符合分配角度闭合差,若观察角为右角,应以与闭合差相同的符合分配角度闭合差。
4. 坐标增量闭合差计算∑△X=X终—X始∑△Y= Y终-Y始Fx=∑△X测-∑△XFY=∑△Y测-∑△Y5。
坐标增量改正数计算公式VX=—Fx/∑D³DiVY=—FY/∑D³Di² ²所以: ∑VX= - Fx ∑VY= - FY6. 导线全长绝对闭合差F=SQR(FX^2+FY^2)7. 导线全长相对闭合差K=F/∑D=1/∑D/F8. 坐标增量计算导线测量的内业方法本人不才悉心整理出来的望能给同行业人士提供点资料(一)闭合导线内业计算已知A点的坐标XA=450.000米,YA=450。
000米,导线各边长,各内角和起始边AB 的方位角αAB如图所示,试计算B、C、D、E各点的坐标。
1角度闭合差:图6—8 闭合导线算例草图角度的改正数△β为:2、导线边方位角的推算BC边的方位角CD边的方位角AB边的方位角右角推算方位角的公式:(校核)3、坐标增量计算设D12、α12为已知,则12边的坐标增量为:4、坐标增量闭合差的计算与调整因为闭合导线是一闭合多边形,其坐标增量的代数和在理论上应等于零,即:但由于测定导线边长和观测内角过程中存在误差,所以实际上坐标增量之和往往不等于零而产生一个差值,这个差值称为坐标增量闭合差。
分别用表示:缺口AA′的长度称为导线全长闭合差,以f表示。
由图可知:图6-9 闭合导线全长闭合差导线相对闭合差。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(1)导线边方位角的计算
如图2—1为具有两个连接角的符合导线,已知控制点LF488、LF488A、GLF14、GLF15的坐标及LF488-LF488A、GLF14-GLF15的方位角,现观测了导线各边的长度、转折角、连接角,如表2-2-2所示。
按下式计算各边的方位角:α前 = α后 + β左–180°(2—1)
最后推算得到GLF14-GLF15的方位角α′GLF14-GLF15 。
由于在角度测量中不可避免地存在误差,使得α′GLF14-GLF15 与αGLF14-GLF15 不一致,其差值称为角度闭合差。
即
ƒβ = α′GLF14-GLF15 -αGLF14-GLF15 (2—2)
由于各转折角都是按等精度观测的,所以坐标方位角闭合差ƒβ可平均分配到每个角度上,角度闭合差调整的原则是:将角度闭合差ƒβ以相反的符号平均改正到各角度观测值中,使改正后的角度观测值与理论值一致。
这样,每个角的改正数为:
V = ƒβ/n (2—3)
n 为观测角数
(2)交点坐标的计算
计算出各导线边的方位角后,用观测的导线边长计算出坐标增量。
按坐标增量和路线起点A的坐标可计算出导线各点的坐标,同时推算出路线终点B的坐标: X′B = X A + ∑ΔX
Y′B = Y A + ∑ΔY
理论上,(X′B,Y′B)与(X B,Y B)应相等,而实际上,虽然经过角度闭合差的调整,并不等于测角误差都得以消除,同时,由于导线的边长测量也存在误差,因此,产生了坐标增量闭合差。
坐标增量闭合差表示为:
ƒx = ∑ΔX - (X B– X A)(2—4)
ƒy = ∑ΔY - (Y B– Y A)
导线全长闭合差为:
ƒs = √ƒ²x + ƒ²y (2—5)导线全长闭合差ƒs是由角度和边长测量误差引起的。
通常是导线越长,导
线全长闭合差越大。
因此导线全长闭合差不能说明相同等级的导线测量精度。
导线测量精度一般是用导线全长闭合差ƒs与导线全长∑s的比值,并以分子为1的形式表示,称为导线的相对闭合差K,表示为:
K = ƒs /∑s (2—6)处理坐标闭合差的方法为按各导线边的长度成比例地改正它们的坐标增量,其改正数为:
VΔXij = -ƒx×S ij/∑s (2—7) VΔyij = -ƒy×S ij/∑s
改正后的坐标增量为:
Δ′Xij = ΔX + VΔXij (2—8)
Δ′yij = ΔY + VΔyij
求得改正后的坐标增量后,即可按坐标正算公式依次推算各未知点的坐标。
(3)计算成果
附和导线计算表2—2—3
ƒβ = 42″ƒβ容= ±40√6 = ±98″ K = ƒs /∑s = 1/7317.97。