航海学讲义之船位误差二
《航海学》船舶定位课件2_7船位误差理论
g
g
u g dn n
Ⅰ′ Ⅰ end
退出
上海海事大学航海教研室制作
二、航海上常用位置线的梯度
1.方位位置线梯度
2.距离位置线梯度 3.方位差位置线梯度 4.距离差位置线梯度
上海海事大学航海教研室制作
退出
1.方位位置线梯度
(1)岸测船方位位置线梯度 (2)船测岸方位位置线梯度
l
n
L的意义:它不是真值,但确是真值的最可能值——称L为真 值的最概率值(最或然值、最或是值)
end
上海海事大学航海教研室制作 退出
二、单一观测的标准差m
1.理论计算公式
m
2i n
n
2 .实用计算公式——白塞尔公式
m
式中:
VV
n 1
vi li L
Hale Waihona Puke end上海海事大学航海教研室制作 退出
三、随机误差的传播规律
1 .函数标准差的一般式
问题:1)量面积误差?2)航向误差?即函数误差?如何求 设有函数 Z f ( x, y,, t )
其中
x , y , , t
为独立的直接观测量,它们的标准差分别为 则函数Z的标准差 mZ
2 2 Z
end
上海海事大学航海教研室制作 退出
极限误差
极限误差——3m 意义:1)从误差角度:观测中超过3m的误差只有0.3%。 2)从被观测量角度:被观测量的实际值落在“观测值±3m” 内的概率有99.7%。 例如:有人测量桌子长度为99.8±0.4cm 说明实际桌子长度在99.8±1.2cm(98.6~101cm)内的可能 性有99.7%
观测误差和船位误差(037-8)

x0 x 改正量
航海中的罗经差、陀罗差、指标差等均为改正量,而在习惯上 称其为误差,这在实际使用时要特别加以注意的。 如:TC=CC+△C SL=(L2-L1) ×(1+△L) TB=GB+△G
第二章 位置线和船位理论
方法误差:测量原理和方法本身存在 缺陷和偏差。 仪器误差:测量仪器、设备、装置导致
观测误差产生的原因
的测量误差,如六分仪的器差。
环境误差:测量环境、条件引起的测量误差, 如光线、气 温、气压等的变化。 人员误差:如照准偏差、读数误差
观测误差的分类
随机误差 系统误差 粗差
第二章 位置线和船位理论
随机误差: 又称偶然误差,它指在相同条件下,对同一量重复 (random 观测,产生的误差符号与其绝对值大小不确定。 error) 随机误差个别值无任何规律,但大量观测值呈现一 定的统计规律性。
第二章 位置线和船位理论
误差与精度:
误差与精度均可用以描述观测结果的可信赖程度。 误差:反映观测值偏离真值的程度; 精度:反映观测值接近真值的程度;
误差小,精度高;误差大,精度低。
随机误差的统计特征
正态分布
对称性 单峰性 有界性 抵偿性
绝对值相等的正负误差出现的次数相等
当测量次数足够多时,随机 误差算术平均值趋于0
计算含误差的航程S值为: 1200 cos41 Dep tgC 7.54709580 tgC 120 D C取82˚.5(含误差82.4522010642-82.5=-0.047798358) mS D (secC) mC C S=919.4 n mile(含误差) D cos2 C sin C mC S D / cosC 根据误差传播理论: D tgC / cosC mC 代入计算得误差: mS=120×tg82.4522010642/cos82.4522010642× -0.047798358 ×3.1415928/180=5.8 n mile 与计算得误差:919.4-913.6=5.8 n mile结果一致
《航海学》船舶定位课件2_5天文定位
上海海事大学航海教研室制作
end
退出
1.求测天时的准确天文钟时
➢ 2)测天前启动秒表——先在海图室对照天文钟启动秒表记录 钟时CT1 ,再测高度并按停秒表,记录秒表时WT,则
➢ 测天时的准确天文钟时C.T.为:
➢
C.T.= CT1
+4s
累积日差
+2s 9
+)测定钟差
+1 m28s
测天时的钟差
+1 m30s9
上海海事大学航海教研室制作
end
退出
三、求测天时的天体位置
➢ 1.求测天时的准确天文钟时
➢ 两种测天计时方法: ➢ 1)测天时启动秒表——先测高度,再启动秒表,到海图室对
照天文钟按停秒表,记录钟时CT1和秒表时WT,则 ➢ 测天时的准确天文钟时C.T.为:
世界时(UT1)。 ➢ 有机械天文钟和石英天文钟两类。 ➢ 2 .GPS卫星导航仪 ➢ GPS(Global positioning System)导航仪显示UTC(协
调世界时),与UT1相差<0.9秒。
上海海事大学航海教研室制作
end
退出
一、船舶计时器
➢ 3.秒表 ➢ 用于测天计时等。 ➢ 4 .船钟 ➢ 船钟(Ship’s clocks)是用于指示船时的计时器。 ➢ 它有普通的机械钟和电子钟两类。 ➢ 目前现代化的船舶装有电子船钟系统(Electronic
➢ 器差(Instrument error) ——偏心差、棱性差和刻度差等的
综合误差
六分仪器差表
测角c 0 10 20 30 40 50 60 70 80 90 100 110 120
两条船位线定位的船位误差
第三节两条船位线定位的船位误差1.两天体定位,用描述船位随机误差最好。
A.船位误差带B.船位误差四边形C.船位误差椭圆D.船位误差圆2.考虑到航迹推算误差和两条船位线的夹角这两方面因素对观测船位的影响,太阳移线定位要求太阳方位变化在。
A.15︒以内为好B.30︒~50︒为好C.50︒~70︒为好D.70︒~90︒为好3.两条方位船位线定位,两船位线交角取值范围为。
A.60︒~120︒B.30︒~60︒C.30︒~150︒D.60︒~90︒4.为提高两条方位船位线定位精度应考虑。
Ⅰ.两船位线交角趋近90︒;Ⅱ.先测正横附近的物标;Ⅲ.观测海图上有准确位置的近物标;Ⅳ.尽量缩短两次观测的时间间隔;Ⅴ.尽量减小观测误差。
A.Ⅰ,Ⅱ,Ⅲ,Ⅳ,ⅤB.Ⅰ,Ⅲ,Ⅳ,ⅤC.Ⅰ,Ⅱ,Ⅲ,ⅣD.Ⅱ,Ⅲ,Ⅳ,Ⅴ5.在等精度条件下,当两天体的方位差角大于90︒时,船位在过两船位线的交点所作的的方向上误差大。
A.两船位线交角的锐角角平分线B.两船位线交角的钝角角平分线C.两天体的平均方位线D.A或C6.在等精度条件下,只考虑随机误差,当两天体的方位差角小于90︒时,船位在过两船位线的交点所作的的方向上误差大。
A.两天体的平均方位线B.两船位线交角的锐角角平分线C.两天体的平均方位±90︒线D.B或C7.在等精度的条件下,当两天体的方位差角大于90°时,观测船位在的方向上误差大。
A.平均方位±90°B.平均方位C.天体D.±90°8.两天体定位,两天体的方位差角趋近最好。
A.180°B.120°C.90°D.0°9.在等精度条件下,只考虑随机误差的影响,天文船位在方向上误差大。
A.两条船位线交角的锐角角平分线B.两条船位线交角的钝角角平分线C.过两船位线的交点所作的两天体的方位线D.天体的方位线10.过两条天文船位线的交点所做的两天体的平均方位线可以认为是一条消除了的船位线。
11_2船位误差.
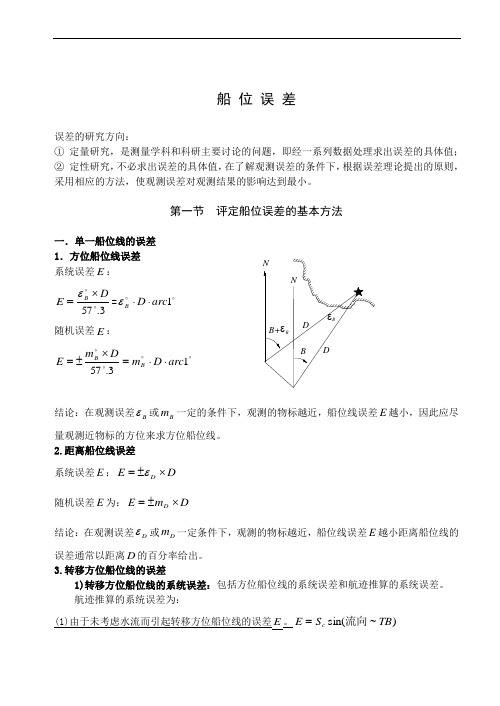
船 位 误 差误差的研究方向:① 定量研究,是测量学科和科研主要讨论的问题,即经一系列数据处理求出误差的具体值;② 定性研究,不必求出误差的具体值,在了解观测误差的条件下,根据误差理论提出的原则,采用相应的方法,使观测误差对观测结果的影响达到最小。
第一节 评定船位误差的基本方法一.单一船位线的误差 1.方位船位线误差 系统误差E :=E 3.57 DB⨯ε=1arc D B ⋅⋅ε随机误差E :13.57arc D m D m E B B ⋅⋅=⨯±=结论:在观测误差B ε或B m 一定的条件下,观测的物标越近,船位线误差E 越小,因此应尽量观测近物标的方位来求方位船位线。
2.距离船位线误差系统误差E :D E D ⨯±=ε 随机误差E 为:D m E D ⨯±=结论:在观测误差D ε或D m 一定条件下,观测的物标越近,船位线误差E 越小距离船位线的误差通常以距离D 的百分率给出。
3.转移方位船位线的误差1)转移方位船位线的系统误差:包括方位船位线的系统误差和航迹推算的系统误差。
航迹推算的系统误差为:(1)由于未考虑水流而引起转移方位船位线的误差E 。
)~sin(TB S c 流向=结论:当转移船位线的方位TB 与流向平行时E =0,误差最小,垂直时,E =c S 误差最大。
移线的时间间隔越短,c S 越小,则E 越小,在航海实际工作中该项E 属于未定系统误差。
(2)由推算航向的误差C ε引起转移船位线的误差E :Q arc S Q S E c c cos 1cos 3.57εε==Q =TB -TC ,移线期间的航程为S 。
结论:当Q =90°时,误差E 最小。
(3)由推算航程的误差S ε引起转移船位线的误差EQ E s sin ε=结论:当Q =0°时,误差E 最小。
2)转移方位船位线的随机误差转移方位船位线的随机误差包括转移前船位线的标准差B m 和转移期间的推算误差ρ:22ρ+±=B m E4.距离差船位线误差距离差船位线的随机误差为: 2csc 22csc081.0γγd t m m E ∆∆±=±= t m ∆——时差的标准差(μs );d m ∆——距离差的标准差(′);γ——船对基线的张角。
航海学海图作业规定与要求航迹绘算航迹推算误差

航迹绘算旳名词和术语
计划航迹线简称计划航线(intended track)ITR
——开航前根据航次命令,经过航线拟定,并画 在海图上旳航线。
计划航迹向简称计划航向(course of advance)
2、航迹推算旳作用
航迹推算是驾驶员在任何情况下,在任何时刻都 能求取船位旳最基本措施。航迹推算还能使驾驶员清 楚地了解船舶在海上运动旳连续轨迹,而且能在海图 上推测航行前方有无航海危险。同步推算船位又是陆 标定位、天文定位和无线电航海仪器定位旳基础。
第一节 航迹绘算
目旳要求:熟悉风、流对船舶航行旳影响, 熟悉风流中航行海图作业措施。
当航线接近南北,或航线太短,航向不宜按上述要求标注时, 可标注在航线旳旁边,并以箭头示之。
第十六条 观察船位记入航海日志时,应记观察原始数据,涉 及:时间、计程仪读数、物标名称和有关读数及改正量(天测船位, 记天体名称、船位坐标.不记改正量)、船位差(参照性旳船位不记 船位差)。
1、航迹推算是:
思索练习
第一章 航迹推算
涉及航迹绘算和航迹计算两种措施
目旳要求:熟悉风、流对船舶航行旳影响, 熟悉风流中航行海图作业措施。
1、航迹推算旳概念
航迹推算是在不借助外界导航物标旳条件下,只依托船舶 最基本旳航海仪器(罗经和计程仪)所指示旳航向和航程并计及 外界风流资料,从已知旳推算起始点开始,推算出具有一定精 度旳航迹和某一时刻旳船位。
(3)风压差表
影响风压差旳原因:
(1)风舷角:风舷角接近90º,α最大;
假如在航线上标不下或标注有困难时,能够标注在航线旳旁边, 并以箭头示之。应该注意旳是:在海图上和航海日志中标注和记载 旳都是仪表上旳直接读数和仪器误差,而不是改正过旳数值。全部 图上旳标注不应该遮盖图上已标明旳航海资料。
航海学-第三章 船舶定位2
end
天津海运职业学院航海教研室 退出
§2 陆标定位的方法
一、陆标识别的方法 二、方位的测定方法 三、距离的测定方法
NT M TB=310° TB±180° =310°-180 °
2)近距离岸测船方位位置线
物标 M 处的测者观测船 舶得TB=131° 。求船 舶位置线 这是由物标 M 处的测者 观测 船 舶 的 TB 得到 的 船舶位置线——在海图 上 从 物 标 M 按 TB 画 出 方位线 (如图) 。 NT TB=131° M
end
天津海运职业学院航海教研室 退出
1)近距离船测岸方位位置线
船上的测者观测灯塔 TB=310 °。 求船舶 位置线 这是由船上的测者观 测 物 标 M 的 TB 得 到 的位置线 在海图上从物标 M按 TB 的 反 方 向 画 出 方 位线(如图) 。 end
天津海运职业学院航海教研室 退出
第三章 船舶定位
第一节 位置线与船位线 第二节 陆标的识别和方位距离的测定法 第三节 方位定位 第四节 距离定位 第五节 距离方位定位 第六节 移线定位
退出
§第一节 位置线与船位线
一、位置线 二、航海上常用的位置线 三、船位线
天津海运职业学院航海教研室
退出
一、位置线
1)位置线的定义
几何学上,与定点保持等值的动点轨迹称等值线。 航海上,船舶观测某一定点(或被某一定点观测)得到一观 测值U,则与该定点保持U观测值的动点轨迹称船舶位置线 定义 位置线 (line of position , LOP)—— 在航海定位中,符合某 一观测值的等值线(即在地球面(海图)上保持相等观测值 的动点轨迹)。
大连海事大学航海学2课件——天文船位误差
N A
2ψ
k
k
2ψ c
2.截点距离误差:由于截点不正确而产生的误差。
N A
k
k
k
2ψ
c
截点距离误差小于0´.1
3.船位线的曲率误差:在墨卡托海图上用恒向 线直线代替船位圆曲线所产生的误差;
N A
k
k
c
上述误差在一般情况(中纬海区)下均 可忽略。
只有在高纬海区、 天体高度较高、 截距较大、 天体接近东、西方向时 才考虑修正上述1、3项误差。
在大洋中,该误差可忽略不计;
在沿海、海湾特别是气温与水温的温差 相差很大时,可产生不可忽略的误差。
这就是为什么沿海天文定位不准确的原 因所在。
(2)蒙气差的误差
利用公式计算出的蒙气差与实际蒙气差 会产生一定的误差,并与气温、气压有 关。
当天体的高度低于15时会产生不可忽略 的误差。
当天体的高度大于15并小于30时,蒙 气差的误差约为0.2。
2.如果船位误差三角形较大,三天体分布的范围又在180°以内,按系 统误差三角形处理,观测船位在误差三角形之外,按随机误差三角形处 理观测船位在三角形之内,这时可取这两点连线的中点为观测船位。
3.当三天体分布范围在180°以上时,无论按系统误差还是按随机误差 处理观测船位均在误差三角形之内,特别是当三天体相互之间的方位差 角均为120°时,两种处理方法的结果是同一点(内切圆的圆心),该 点的可信赖程度最高。
p´ P P´
二、随机误差对观测船位的影响
船位误差四边形、船位误差椭圆、船位误差圆
根据国际海事(IMO)规定的《海上导航精度标准》,观 测船位采用95%不确定度,则
等精度95%误差圆的半径为:
R0.95=
船长航海学知识点
船长航海学知识点航海学1.海图比例尺:①海图比例尺为图上长度与其对应的地面实际长度之比;②一般在海图上标注的是普通比例尺或基准比例尺,大约是(其实不是这么算的)图上各局部比例尺的平均值,或等于图上某点或某条线上的局部比例尺;③表示法:数字比例尺---直线比例尺---④墨卡托海图:A.比例尺是图上某基准纬线的局部比例尺或图外某基准纬线的局部比例尺,B.同一点各个方向上的局部比例尺相等C.同一纬线各点局部比例尺相同;Φ=C0/COSΦ(CΦ为纬度Φ处比例尺,C0为纬度为0处比例尺)。
或CΦ1/CΦ2=COSΦ2/COSΦ1(各纬度处局部比例尺之比等于纬度余弦反比);⑤在同一纬度局部比例尺越大,同一图上相同两经线间间距越大;⑥同一图上,随纬度的升高,局部比例尺增大(纬度渐长率);⑦海图上最细的线0.1mm(即海图极限精度),海图比例尺越小,精度越低;比例尺越大,极限精度越高;2.高程和水深①高程基准面:A.中版:1985年高程基准面或当地平均海面;B.英版:平均大潮高潮面(半日潮地区),平均高高潮面(日潮地区),当地平均海面(无潮海区);②深度基准面(也是干出高度的起算面):A.中版:理论最低潮面;B.英版:天文最低潮面;③无论是中版还是英版,灯高和桥净高都是从平均大潮高潮面(MHWS)起算;④平均海面是最基本的基准面,高程基准面和深度基准面都是以平均海面标注的;⑤高程(和净空高度同):A.陆上的直接标数字,水上数字带括号;B.米制单位米,拓制单位英尺;C.不足10米,精确到;大于10米,精确到整数;⑥水深:中版 A.小于21米,标注至0.1m;B.水深21-31米,标注0.5m,(即,,,归临近的整数,归为);大于31米,标注至整数;C.实测水用斜体字,直体字表示深度不准或采用旧水深资料或小比例尺海图;英版:A.水深小于11拓,用拓和英尺表示;B.水深大于11拓,用拓表示;C.如果测量精确,11-15拓,也可用拓和英尺表示,大于15拓,用拓表示;⑦1拓≈1.83米;⑧底质:A.先用形容词,再用底质;形容词小写,底质大写;B.底质缩写;S(沙)、M(泥)、Cy(黏土)、Si(淤泥)、St(石头)、R (岩石)、Sh(贝)、Co(珊瑚)、Cb (鹅卵石)、G(砾)、Wd(海草);C.形容词:so(软)、sf(硬)、h(坚硬)、bk(碎);f(细)、m(中)、c(粗);D.其中.表示混合底质,沙多泥少(前多后少);E.其中S/M 表示上层沙,下层泥;3.误差均方误差、随机误差和标准差是一回事;①单个位置线的误差:A.方位位置线系统误差:Σ=(ξb * D)/;B.方位位置线标准差:E=(σ*D)/;C.距离位置线系统误差:E=ξb ;D.距离位置线的标准差:E=σ;②A.两方位定位系统误差:E=(ξ*d)/*sin θ);B.两方位定位标准差:E=(σ*22D D +)/*sin θ);C.物标选择:尽量选择明显、位置准确和离船较近的物标,即D 尽可能小(孤立、显著、较近);兼顾系统误差和随机误差,最好选择60-90°物标,一般夹角应满足30-150°(夹角不是越大越好)。
大连海事大学航海学2课件——误差基础知识
n
n
称为最概率值(最佳估值)。
算术平均值的应用条件: 被测对象具有同一个值,亦即在观测过
程中,被测对象的值的变化相对观测误 差来说小到可以忽略的程度。 利用算术平均值求最概率值将受到一定 的限制,为了在更复杂的观测结果中求 最概率值,人们引入了最小二乘法。
二、最小二乘法原理 1.误差与残差 误差Δi=li-L i=1、2、……n。 残差νi=li- l i=1、2、……n。 残差的性质与误差的性质是一样的,因
解:
TB =±
2 CB
+
2 Var
+
2 Dev
=± 0.52 + 0.12 + 0.32
=±0.6
第四章 等精度观测平差
平差的目的: 1.求观测值的最概率值 2.观测精度的估计 3.求观测结果
第一节 等精度直接观测平差 一、求观测值的最概率值 在等精度直接观测平差中最概率值即是
观测值的算术平均值。
环境误差:观测环境因素对观测的影 响而产生的误差,如光线、气温、气压 等的变化。
人员误差:由测者感官上的分辨、反 应的能力而产生的误差,如照准偏差、 读数偏差、看水尺误差等。
(2)处理观测数据时所产生的误差 有效数字凑整误差。 近似计算的误差。 利用参数、常数所产生的误差。
三、误差的种类
尺度以外,还可采用概率误差作为衡量 随机误差的标准。概率误差与标准差的 关系为: γ=0.6745σ≈2/3σ
3.随机不确定度 表示误差大小时出现两种情况,一种是明确
误差的“+”或“-”;另一种是以“±” 给出一个区间,表示误差变化的范围, 凡是用区间“±”给出的误差指标均称为不 确定度。如t 在实际工作中,航海人员往往将误差和不确 定度混用了。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
船 位 误 差误差的研究方向:① 定量研究,是测量学科和科研主要讨论的问题,即经一系列数据处理求出误差的具体值;② 定性研究,不必求出误差的具体值,在了解观测误差的条件下,根据误差理论提出的原则,采用相应的方法,使观测误差对观测结果的影响达到最小。
第一节 评定船位误差的基本方法一.单一船位线的误差 1.方位船位线误差 系统误差E :=E 3.57 DB⨯ε=1arc D B ⋅⋅ε随机误差E :13.57arc D m D m E B B ⋅⋅=⨯±=结论:在观测误差B ε或B m 一定的条件下,观测的物标越近,船位线误差E 越小,因此应尽量观测近物标的方位来求方位船位线。
2.距离船位线误差系统误差E :D E D ⨯±=ε 随机误差E 为:D m E D ⨯±=结论:在观测误差D ε或D m 一定条件下,观测的物标越近,船位线误差E 越小距离船位线的误差通常以距离D 的百分率给出。
3.转移方位船位线的误差1)转移方位船位线的系统误差:包括方位船位线的系统误差和航迹推算的系统误差。
航迹推算的系统误差为:(1)由于未考虑水流而引起转移方位船位线的误差。
)~sin(TB S c 流向=结论:当转移船位线的方位TB 与流向平行时E =0,误差最小,垂直时,E =c S 误差最大。
移线的时间间隔越短,c S 越小,则E 越小,在航海实际工作中该项E 属于未定系统误差。
(2)由推算航向的误差C ε引起转移船位线的误差E :Q arc S Q S E c c cos 1cos 3.57εε==Q =TB -TC ,移线期间的航程为S 。
结论:当Q =90°时,误差E 最小。
(3)由推算航程的误差S ε引起转移船位线的误差EQ E s sin ε=结论:当Q =0°时,误差E 最小。
2)转移方位船位线的随机误差转移方位船位线的随机误差包括转移前船位线的标准差B m 和转移期间的推算误差ρ:22ρ+±=B m E4.距离差船位线误差距离差船位线的随机误差为:2csc 22csc 081.0γγd t m m E ∆∆±=±= t m ∆——时差的标准差(μs );d m ∆——距离差的标准差(′);γ——船对基线的张角。
5.天文船位线误差天文船位线的误差由两部分组成:“高度差法原理上的误差”和“测、算、画误差”。
1)高度差法原理上的误差(系统误差)高度差法原理上的误差包括三项:(1)船位线的方向误差:在墨卡托海图上用恒向线直线代替天体的大圆方位线所产生的误差; (2)船位线的曲率误差:在墨卡托海图上用恒向线直线代替船位圆曲线所产生的误差; (3)截点距离误差:由于截点不正确而产生的误差`。
上述误差在一般情况下(中纬海区)均可忽略。
只有在高纬海区、天体高度较高、截距较大、天体接近东、西方向时才考虑修正上述(1)、(2)项误差。
2)测、算、画误差(系统误差和随机误差)Dh =t h -C h 和C A计算方位C A 的误差可忽略不计,主要分析观测和计算误差。
(1)测、算、画中的系统误差① 实际眼高差与表列眼高差不一致而产生的误差△d :在大洋中,该误差可忽略不计;在沿海、海湾特别是气温与水温的温差相差很大时,可产生不可忽略的误差。
②蒙气差的误差:当天体的高度低于15°时会产生不可忽略的误差。
当天体的高度在15°-30°时,蒙气差的误差约为;当天体的高度大于30°时,小于。
为减小影响应观测高度大于15°的天体,最好大于30°。
③ 天文钟钟差的误差在最不利的情况下,每秒钟的误差会产生0.′25的误差。
综上所述,天文船位线的系统误差主要是实际眼高差与表列眼高差不一致而产生的误差。
(2)测、算、画中的随机误差测、算、画中的随机误差包括观测高度的随机误差(该误差是各种因素综合影响所致)和计算高度的随机误差hc m (主要包括使用计算工具的误差和凑整误差)。
凑整误差,每次凑整误差等于近似数末位的±0.5单位,以α=±0.5(末位)。
航海天文历中的格林时角和赤纬均保留小数点后一位,则其最大凑整误差α=±0′.05,其凑整标差为:03.0305.0'±≈'±=凑m结论:测、算、画误差所包括的系统误差主要是实际眼高差与表列眼高差不一致而产生的误差;随机误差主要为高度差的误差22hc ht Dh m m m +±= 。
6.转移太阳船位线误差转移太阳船位线的误差包括观测太阳船位线的误差和转移过程中的推算误差。
1)转移太阳船位线的系统误差(1)由推算航程的误差S ε和推算航向的误差C ε引起转移船位线的误差E 。
Q S Q E C S sin cos εε+=(Q ——为天体的舷角(A c -CA ))结论:如果只考虑航程误差S ε(忽略C ε),为使转移船位线的误差最小,太阳在正横(Q =90º或270º)附近时进行一次观测为好;如果只考虑航向误差C ε(忽略S ε),太阳在首尾(Q =0º或180º)附近时进行第一次观测为好。
(2)由航程误差S ε和航向误差C ε而引起转移船位线的最大误差 22)1(arc S E C S εε+±=结论:只考虑推算误差时,为减小转移太阳船位线的误差应尽量减小航向和航程误差并且尽量缩短移线时间间隔。
2)转移太阳船位线的随机误差包括太阳船位线的随机误差Dh m 和推算误差ρ转移太阳船位线的随机误差为: 22ρ+±=Dh m E结论:为减小转移太阳船位线的误差,应提高观测精度,同时尽可能地缩短时间间隔,以减小推算误差。
评定船位误差的方法观测船位的误差包括系统误差和随机误差1.系统误差影响下的观测船位精度1)两条船位线定位时的系统误差系统误差所引起的两条船位线的误差分别为:111g E ε=和222g E ε=两条船位线向量误差分别为:θεθsin sin 1111⋅==g E V 和θεθsin sin 2222⋅==g E V 船位误差为δ为:θεεεεθδcos 2sin 12121222211g g g g -⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛=观测误差相等,即ε1=ε2=ε,则θθεδcos 211sin 212221g g g g -⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛= 结论:在运用两条船位线进行定位时,为了消除或者减小系统误差的影响,则:⑴应尽可能地减小观测值的系统误差。
⑵应尽可能地使两条船位线的交角接近90°,不小于30°,不大于150°。
2)三条船位线定位时的系统误差船位误差三角形:如果测者能够“同时”测得三条船位线进行观测定位,因误差的存在,通常三条船位线交出一个三角形。
消除误差后的观测船位位于F 点。
F 点到三条位置线的距离分别为E 1、E 2和E 3,其值分别为:111g E ε=、222g E ε=和333g E ε=结论:当E 1=E 2=E 3,即当三条船位线的系统误差相等时,则消除了系统误差后的船位点应该是在误差三角形的内心或旁心上,即:⑴当三条船位线的方向(即为位置线的梯度的方向)在平面上的分布超过180°时,实际船位点位于三角形的内心上。
⑵当三条船位线的方向在平面上的分布小于180º时,实际船位点位于三角形的一个旁心上。
三条船位线定位时,为消除或减小系统误差对定位精度的影响,应尽可能地使各船位线之间的夹角最好均匀分布为60º或120º,至少不小于30º或不大于150º。
2.随机误差影响下的观测船位的精度1)两条船位线定位时的随机误差最概率船位(最接近真实船位的船位)的误差可以采用标准误差四边形、标准误差椭圆或标准误差圆来评定。
(1)标准误差四边形船位标准误差带:船位线有标准误差±E ,以船位线为中心线左右±E 范围所构成的带域,亦称船位均方误差带,简称船位误差带。
真实船位落在一倍(±E )船位标准误差带内的概率分为68.3%。
船位标准误差四边形:以同时测得的两条船位线之船位误差带所构成的平行四边形,亦称均方误差四边形。
观测时真实船位落在一倍准误差四边形内的概率为46.6%。
(2)标准误差椭圆标准误差椭圆又称均方误差椭圆:真实船位落在最概率船位附近等概率密度点的轨迹是一椭圆族。
标准误差椭圆:以船位线标准误差(±E )所作椭圆,即与(一倍)标准误差四边形相内切的误差椭圆,真实船位落在标准误差椭圆内的概率是39.4%。
特点:能够反映观测船位误差的大小和方向,是最为理想的反映观测船位精度的误差图形;但是,绘画复杂,在实际航海当中较少使用。
(3)标准误差圆标准误差圆又称均方误差圆,它是标准误差四边形的外接圆。
标准误差圆:是以最概率船位点F 为圆心,以22b a M +=为半径所作的圆。
222221212221sin 1sin 1g m g m E E M +=+=θθ 结论:为了减小观测船位的均方误差(即均方误差圆半径)M ,应该: ①尽量使两位置线交角接近90°; ②尽量减小观测值的标准误差1m 和2m 。
真实船位在观测船位均方误差圆内的概率值是一个变量,它随着标准误差椭圆的长短半轴的比值b/a 的变化而变化的。
63.2~68.3特点:标准误差圆是航海实践中用来代替标准误差椭圆评定随机误差影响下船位精度的最为常用的图形。
但当两条船位线的误差差别较大时,或者是船位线的夹角较小时,一般用标准误差四边形而不宜用标准误差圆。
标准误差圆具有作图简便、直观和在标准误差圆内真实船位出现的概率大的优点。
它无法反映误差的方向。
(4)三种观测船位标准误差图形的比较①在评定船位精度方面,误差椭圆是最为精确和最有利的图形,四边形次之,椭圆和四边形均能反映误差的方向,误差圆无法反映误差的方向。
②在作图方面,误差圆作图简易和方便,椭圆作图最为复杂,因而实际航海当中误差圆是最为常用的,为了表征误差的方向有时也用四边形来评定船位精度;③真实船位出现的概率,误差圆的概率最大,其次为四边形,椭圆的概率最小,因为在同样一倍标准误差圆、椭圆和四边形中,误差圆的面积最大;若将三种图形的面积画成同样大小时,船位出现在椭圆内的概率最大,四边形次之,误差圆最小。
2)偶然误差影响下三条船位线确定最概率船位的方法。
反中线法推算船位的误差影响因素1.推算起始点的误差(the error of initial estimating point )要求航迹推算的起始点必须是准确的观测船位,目的是为了减小其后航迹推算的误差。