双横臂独立悬架-转向系统的分析与设计
双横臂独立悬架导向-转向系统的分析与设计

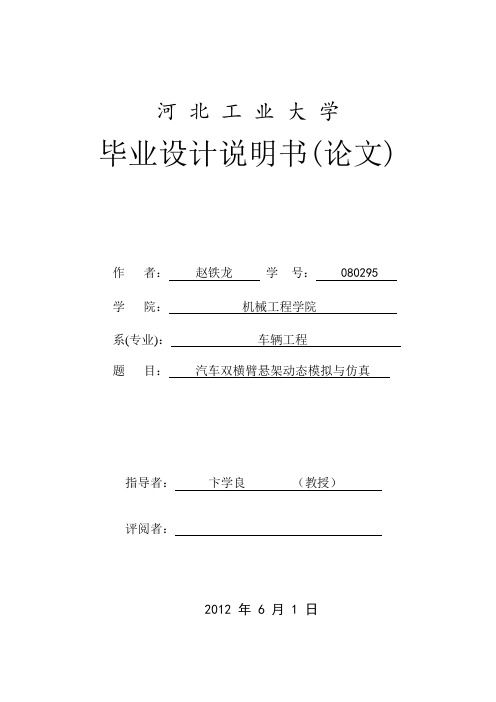
双横臂独立悬架导向-转向系统的分析与设计一、问题描述及参数范围图1所示为汽车前轮采用的一种双横臂悬架-转向系统机构示意图(简化),导向机构ABCD由上横臂AB、转向主销BC和下横臂CD及车架AD构成。
其中,A、D分别为上、下横臂与车架联接的铰销中心(假定两铰销轴线均平行于车辆纵向),B、C分别为转向主销BC与上、下横臂联接的球铰中心。
在车辆横向垂直平面内,上、下横臂相对水平面的摆角分别用ϕ、ψ表示,转向主销内倾角用β0表示。
转向传动机构采用由齿轮-齿条转向器驱动的断开式转向梯形机构GFE E'F'G'(F'与F,G'与G对称,未画出)。
其中,左轮转向梯形机构EFG由齿轮-齿条转向器输出齿条EE'、左轮转向横拉杆EF、左轮转向节臂FG及车架构成。
E、E'分别为转向器齿条上与左右转向横拉杆铰接的球铰中心,F为左轮转向横拉杆EF与左轮转向节臂FG铰接的球铰中心,G为左轮转向节臂FG与左轮转向主销BC连线的交点,且FG⊥BC。
另外,车轮轴线KH与转向主销BC交于H,与车轮中心面交于J。
图 1 双横臂悬架-转向系统机构示意图描述悬架ABCD导向机构运动学的机构几何参数主要有:上横臂杆长AB=h1,转向主销球铰中心距BC= h2,下横臂杆长CD=h3,上、下横臂的摆角α、ψ(横臂向外下倾时,取负值),转向主销内倾角β0。
为简便计,不考虑主销后倾角的影响,并假设上、下横臂与车架铰接的轴线均平行于车辆纵向,则图示导向机构ABCD的上、下横臂AB、CD和转向主销轴线BC 将始终在过前轮轴线的汽车横向垂直平面内运动。
在水平面俯视图中,描述EFG左轮转向梯形机构运动学的机构几何参数主要有:EE'=L1,EF= L2,FG= L3,车架上齿条移动方向线EE'与前轮轴线的偏移距Y(前轮轴线在前方时,取正值),转向节臂FG相对于汽车纵向的安装角α0。
另外,左右车轮的转向角分别用α、β表示。
赵铁龙汽车双横臂悬架转向系统建模与性能仿真论文定稿分析
河北工业大学毕业设计说明书(论文)作者:赵铁龙学号: 080295学院:机械工程学院系(专业):车辆工程题目:汽车双横臂悬架动态模拟与仿真指导者:卞学良(教授)评阅者:2012 年 6 月 1 日题目:汽车双横臂悬架动态模拟与仿真摘要:双横臂式独立悬架是汽车常用的悬架之一,尤其在轿车的前轮上被应用广泛。
其优点在于设计简单、性能稳定可靠,可以通过选择合理空间导向杆系的铰接点的位置和控制臂的长度,使得悬架具有所需的运动特性,并且形成恰当的侧倾中心和纵倾中心,从而保证汽车有良好的行驶平顺性和方向稳定性。
通过基于虚拟样机技术对悬架模型进行运动仿真,分析悬架定位参数对性能的影响。
本论文的主要研究内容:1、根据长城哈弗系列汽车的双横臂式悬架的定位参数,运用UG软件建立双横臂式独立悬架的零部件模型,然后再进行装配约束。
2、基于虚拟样机技术,运用ADAMS软件对双横臂式独立悬架进行动态模拟仿真分析,做出车轮外倾角、车轮前束、主销后倾角、主销内倾角随着车轮跳动量的变化曲线以及车轮转向时内外车轮的转角误差曲线。
3、根据ADAMS软件对双横臂式独立悬架做出的运动仿真分析的结果,研究双横臂式独立悬架的各结构参数对车轮定位参数的影响。
通过基于虚拟样机技术,对双横臂式独立悬架和转向机构的建模和动态仿真,从而对双横臂式独立悬架的主要性能进行预测和评估,为双横臂式独立悬架设计提供依据,从而简化悬架系统设计开发过程,缩短产品开发周期,减少产品开发费用和成本,提高产品质量及性能。
关键词:双横臂独立悬架;车轮定位参数;虚拟样机;动力学Title:Auto double wishbone suspension and the dynamic simulation of the simulationAbstract:The double wishbone independent suspension is one of the car's suspension, especially in cars on the front wheels are widely used. The advantage is that the design is simple, stable and reliable performance,by selecting the location and length of the control arm of the hinge pointof the guide rod system in a reasonable space, making the suspension with the desired motion characteristics, and appropriate roll center and center trim in order to ensure the car has a good ride comfort and directional stability. Suspension model based on virtual prototyping technology, motion simulation, analysis of the suspension alignment parameters impacton performance.The main contents of this paper:ing UG software component models of the double-wishbone independent suspension, double wishbone suspension alignment parametersof the Great Wall Hover series cars, and then the assembly constraints.2.The double wishbone independent suspension, dynamic simulation analysis, the use of the ADAMS software based on virtual prototyping technology to make camber, wheel toe, caster angle, kingpin angle with the curve of the wheel runout and wheel steering, internal and external wheel angle error curve.3.According to the results of the ADAMS software and double wishbone independent suspension to make motion simulation, double-wishbone independent suspension, the structural parameters of wheel alignment parameters.Based on virtual prototyping, modeling and dynamic simulation of the double wishbone independent suspension and steering mechanism, which mainly double-wishbone independent suspension performance prediction and evaluation of the double wishbone independent suspension design provide the basis for simplifying the design and development process of the suspension system, shorter product development cycles, reduce product development costs and cost, improve product quality and performance.Key words:double wishbone independent suspension; wheel alignment parameters; virtual simulation; dynamics目录1 绪论 (1)1.1 现代汽车设计 (1)1.2 本文主要研究内容及意义 (2)2 悬架的设计概述及结构分析 (3)2.1 悬架的类型 (3)2.2 悬架的设计要求 (11)2.3 小结 (11)3 双横臂式独立悬架的数学模型 (12)3.1 双横臂式独立悬架的简化模型 (12)3.2 双横臂式独立悬架的结构参数 (13)3.3 小结 (14)4 基于UG的双横臂式独立悬架的设计分析 (15)4.1 UG软件应用简介 (15)4.2 悬架的几何建模 (18)4.3 小结 (21)5 基于ADAMS的双横臂式独立悬架的仿真分析 (23)5.1 ADAMS软件应用简介 (23)5.2 悬架分析系统的建立 (24)5.3 悬架的性能评价指标 (28)5.4 悬架的车轮跳动仿真 (33)5.5 悬架的车轮转向仿真 (37)5.6 小结 (40)结论 (41)参考文献 (42)致谢 (44)1 绪论1.1 现代汽车设计随着现代科学技术的高速发展,人们越来越关注汽车的行驶舒适性和安全性。
272 双横臂独立悬架的设计

双横臂独立悬架的设计
作者: 导师:
QQ 64134703
主要设计内容
§ (1)对双横臂独立悬架的各主要部件如减振 器、横向稳定器、螺旋弹簧和导向机构进行选 型设计分析。 (2)用UG完成双横臂独立悬架的三维实体模 型。 (3)将悬架UG三维实体模型转换为CAD二 维图纸,完成两张A0设计图纸的图量。
QQ 64134703
二 对悬架提出的设计要求
1)保证汽车有良好的行驶平顺性。 2)具有合适的衰减振动能力。 3)保证汽车具有良好的操纵稳定性。 4)汽车制动或加速时要保证车身稳定,减少车身纵倾;转弯 时车身侧倾角要合适。 5)有良好的隔声能力。 6)结构紧凑、占用空间尺寸要小。 7)可靠地传递车身与车轮之间的各种力和力矩,在满足零部 件质量要小的同时,还要保证有足够的强度和寿命。
f
c1
5 = n 1
2
5 = 1
2
= 250
mm
QQ 64134703
刚度:
P 416 3 C1 = = = 1.7kg / mm = 16.66 × 10 N / mm f c1 250
QQ 64134703
二、转向轮定位参数
主销后倾角 :γ 主销内倾角 :β 前轮外倾角 :α 前轮前束 :(A-B)
QQ 64134703
储油筒直径 Dc=1.45D=1.45×40=58mm 前减振器的安装角α=18°; 根据QC/T491—1999《汽车 筒式减振器 尺寸系列及技术 条件》中规定的,取 L2=140mm,外径 D1=65mm,外径 D2=75mm,活塞行程 S=120mm。 GH型减振器
QQ 64134703
汽车双横臂独立悬架的运动学分析和计算

・ #& ・
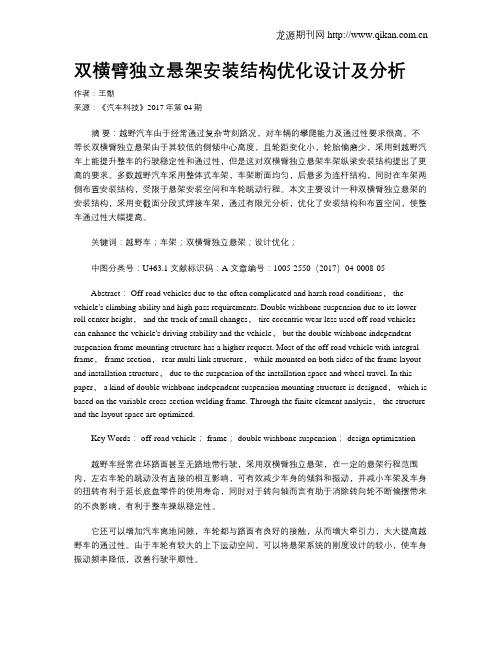
图! !" 下横臂; #" 主轴销; $#
双横臂独立悬架导向机构简图 车轮轴; $ , ! 转动副; # , " 球副; & 车轮中心; ’ 接地点
上横臂; %&
机构的位姿方程:
[+] 所以式 (,) 是三元二次方程组 # 利用数值解法 解
}
(,)
得 ’ 点的坐标: ( ’ , , ’ - , ’. ) # 同理,由于 & 点到 ! , " , ’ 的距离不变,所 以存在下列方程组: % &’ % $ ()* *+ % &" % $ ()* *+ / 其中
% &! % $ ()* *+ . ,
* " * ! !" (" !! (" ("# (#$ () () + !,
(!)
其中
( !" , ( "# , (#$ , ($! 为欧拉变换,分别为!! , !" , "! , "" 的函数; ! 为单位阵 "
* " (!) 简化为: 由于"" % &,从而 (" % ! ,式 * ! !" ( ( () !! (" () + !, "# #$
!
计算实例
如图 + 所示的双横臂系统,建立固定在汽车车身上的直角坐标系,原点位于 * 点 ) + + 和 + ( 轴在 ’,% 平面中与 ’ 轴的夹角分别为 ’ +,-+,-- ,.- ) 初始时刻 * , . , / , 0 , ( , # , (//) 为: 1 , 2 点的坐标 , * (),),)) , 0 (+) , ’ +(+, ’ (01) , # (1,-,2+4 , ’ (2+) , . (0,(1+ , ’ (+,22) , 1 (+-2,(-. , ’ 0(3) , / (3,0+3 , ’ (4-) , 2 (32 , ’ +-+, ’ (.2)
学术论文:【毕业论文】双横臂式前独立悬架的优化设计
【毕业论文】双横臂式前独立悬架的优化设计沈阳理工大学学士学位论文摘要悬架是汽车上的重要总成之一,悬架的作用是弹性地连接车桥和车架,减缓行驶中车辆受到由路面不平引起的冲击力,保证乘坐舒适和货物完好,迅速衰减由于弹性系统引起的振动,使车轮按一定轨迹相对车身运动。
悬架决定着汽车的稳定性、舒适性和平安性,所以研究悬架成为研究汽车中的重要一个环节,ADAMS软件为研究汽车悬架运动学分析提供了帮助。
本次毕业设计首先利用ADAMS软件的View功能给定设计点,创立悬架模型,通过测试悬架模型得到一些曲线和数据,比照这些曲线和数据之后得出轮胎接地点的侧向滑移量变化是影响悬架的重要因素。
所以将目标函数定为车轮接地点的侧向滑移量。
然后通过ADAMS软件的后处理功能优化前悬架模型,最后得出使轮胎接地点的侧向滑移量变化最小的一组数据。
从而到达优化的效果。
关键词:双横臂独立悬架;运动学分析; ADAMSAbstractSuspense is one of the important parts in a car. Suspense serves as a role that connects the axles and frames in a much bouncing way which cankill the unavoidable shock when the car is on a unsmooth road, thus making sure that the goods in the car cannot be damaged as well as guaranteeing a better driving pleasure. It can quickly kill the shock from the bouncing system to let the wheel move a the course of the car. Suspense determines the stability, riding comfort, and safety. Therefore, analyzing the suspense becomes one of the greatest parts of the whole analysis. ADAMS software did a great help to the analysis of suspense kinematics.Thedesign of ADAMS software first given design points, View function tocreate suspension model, through the test suspension model get some curves and data, contrast these curves and data that pick up the tyres after the change of lateral sliding site is the important factors affect suspension. So will the objective function as the wheels of lateral slip pick site. Then through the ADAMS software post-processing function optimizationmodel of the suspension, finally come to pick up the tire place lateral sliding the smallest quantity of set of data. This group of data isfinally wanted results.Key words: double wishbone suspension; kinematics analysis; ADAMS目录TOC \o "1-3" \h \z \u l "_Toc107663939" 1 绪论1l "_Toc107663940" 1.1课题引言1l "_Toc107663941" 1.2 汽车悬架简介1l "_Toc107663942" 1.3 汽车悬架分类1.4 ADAMS简介1.5 本文研究的内容2l "_Toc107663943" 2前悬架模型的建立3l "_Toc107663944" 2.1 创立新模型3l "_Toc107663945" 2.2 添加约束42.3本章小结........................................................................ .. (6)l "_Toc107663948" 3前悬架模型运动学分析7l "_Toc107663949" 3.1 添加驱动7l "_Toc107663950" 3.2测量主销内倾角7l "_Toc107663951" 3.3测量主销后倾角10l "_Toc107663952" 3.4测量前轮外倾角12l "_Toc107663953" 3.5测量前轮前束倾角14l "_Toc107663954" 3.6测量车轮接地点侧向滑移量17l "_Toc107663955" 3.7本章小结19l "_Toc107663974" 4细化前悬架模型21l "_Toc107663975" 4.1 创立设计变量21l "_Toc107663976" 4.2将设计点参数化21l "_Toc107663977" 4.3将物体参数化254.4本章小结 (25)l "_Toc107663982" 5定制界面32l "_Toc107663983" 5.1 创立修改参数对话窗 (3)2l "_Toc107663984" 5.2 修改菜单栏........................................................................ .. (36)l "_Toc107663984" 5.3 本章小结........................................................................ .. (37)6 优化前悬架模型........................................................................ . (26)6.1 定义目标函数 (26)6.2 优化模型 (26)6.3 观察优化结果 (27)6.4 本章小结 (31)l "_Toc107663988" 本文总结40l "_Toc107663989" 致谢41l "_Toc107663990" 参考文献42l "_Toc107663991" 附录A 汉语原文43附录B 英文翻译 l "_Toc107663991" 521 绪论1.1 课题引言在马车出现的时候,为了乘坐更舒适,人类就开始对马车的悬架进行孜孜不倦的探索,随着社会的日益进步和科学技术的不断开展,汽车开始普及,人们对汽车平顺性、稳定性、操控性及其舒适性也有了更高要求。
双横臂独立悬架安装结构优化设计及分析
双横臂独立悬架安装结构优化设计及分析作者:王勖来源:《汽车科技》2017年第04期摘要:越野汽车由于经常通过复杂苛刻路况,对车辆的攀爬能力及通过性要求很高。
不等长双横臂独立悬架由于其较低的侧倾中心高度,且轮距变化小,轮胎偏磨少,采用到越野汽车上能提升整车的行驶稳定性和通过性,但是这对双横臂独立悬架车架纵梁安装结构提出了更高的要求。
多数越野汽车采用整体式车架,车架断面均匀,后悬多为连杆结构,同时在车架两侧布置安装结构,受限于悬架安装空间和车轮跳动行程。
本文主要设计一种双横臂独立悬架的安装结构,采用变截面分段式焊接车架,通过有限元分析,优化了安装结构和布置空间,使整车通过性大幅提高。
关键词:越野车;车架;双横臂独立悬架;设计优化;中图分类号:U463.1 文献标识码:A 文章编号:1005-2550(2017)04-0008-05Abstract: Off-road vehicles due to the often complicated and harsh road conditions, the vehicle's climbing ability and high pass requirements. Double wishbone suspension due to its lower roll center height, and the track of small changes, tire eccentric wear less used off-road vehicles can enhance the vehicle's driving stability and the vehicle, but the double wishbone independent suspension frame mounting structure has a higher request. Most of the off-road vehicle with integral frame, frame section, rear multi link structure, while mounted on both sides of the frame layout and installation structure, due to the suspension of the installation space and wheel travel. In this paper, a kind of double wishbone independent suspension mounting structure is designed, which is based on the variable cross-section welding frame. Through the finite element analysis, the structure and the layout space are optimized.Key Words: off-road vehicle; frame; double wishbone suspension; design optimization越野车经常在坏路面甚至无路地带行驶,采用双横臂独立悬架,在一定的悬架行程范围内,左右车轮的跳动没有直接的相互影响,可有效减少车身的倾斜和振动,并减小车架及车身的扭转有利于延长底盘零件的使用寿命,同时对于转向轴而言有助于消除转向轮不断偏摆带来的不良影响,有利于整车操纵稳定性。
双横臂悬架设计
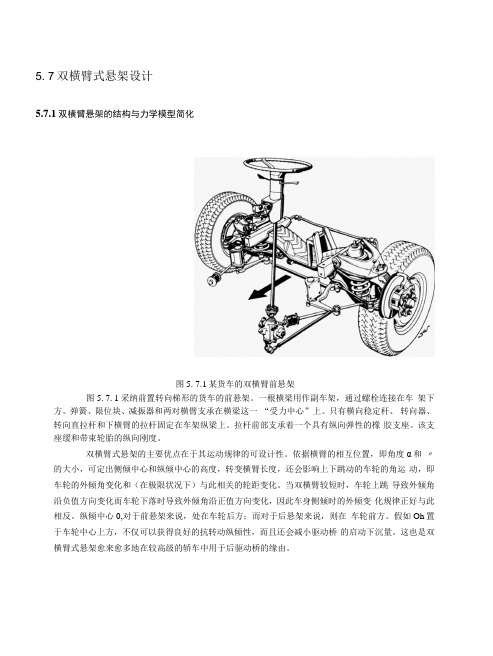
5. 7双横臂式悬架设计5.7.1双横臂悬架的结构与力学模型简化图5. 7.1某货车的双横臂前悬架图5. 7. 1采纳前置转向梯形的货车的前悬架。
一根横梁用作副车架,通过螺栓连接在车架下方。
弹簧、限位块、减振器和两对横臂支承在横梁这一“受力中心”上。
只有横向稳定杆、转向器、转向直拉杆和下横臂的拉杆固定在车架纵梁上。
拉杆前部支承着一个具有纵向弹性的橡胶支座。
该支座缓和带束轮胎的纵向刚度。
双横臂式悬架的主要优点在于其运动规律的可设计性。
依据横臂的相互位置,即角度α和〃的大小,可定出侧倾中心和纵倾中心的高度,转变横臂长度,还会影响上下跳动的车轮的角运动,即车轮的外倾角变化和(在极限状况下)与此相关的轮距变化。
当双横臂较短时,车轮上跳导致外倾角沿负值方向变化而车轮下落时导致外倾角沿正值方向变化,因此车身侧倾时的外倾变化规律正好与此相反。
纵倾中心0,对于前悬架来说,处在车轮后方;而对于后悬架来说,则在车轮前方。
假如Oh置于车轮中心上方,不仅可以获得良好的抗转动纵倾性,而且还会减小驱动桥的启动下沉量。
这也是双横臂式悬架愈来愈多地在较高级的轿车中用于后驱动桥的缘由。
图5.7.2弯长臂式汽车的前轮转向节图5. 7. 2 Daimlcr Benz 260 SE/560 SEC型车的前轮转向节。
它的有效距离C较大。
上横臂6上带有导向球锐链的壳体。
下承载钱链7压入车轮转向节5中。
图中可清晰的看到可通风的制动盘34,他正对直径较大的轮毂9自里向外伸出。
深槽轮辆43的底部不对称,从而为制动钳(图中未画出)留出了位置。
图5.7. 3双横臂式前悬架图5. 7. 3 DaimlCjBOnZ牌260 SE/560 SEC型车的前悬架。
为了使得主销偏移距r s=0mm时, 可通风的制动盘具有较大的直径,该悬架的下承载钱链必需大致位于车轮中心处。
拉伸和压缩行程限位块布置在充气的单筒式减振器中。
先后伸出的支撑杆支撑着一根附S的隔音横梁。
浅析FSAE赛车双横臂式前悬架设计

第1章绪论1.1、FSAE概述1.1.1、背景Formula SAE 赛事由美国汽车工程师协会(the Society of Automotive Engineers 简称SAE)主办。
SAE 是一个拥有超过60000 名会员的世界性的工程协会,致力与海、陆、空各类交通工具的发展进步。
Formula SAE 是一项面对美国汽车工程师学会学生会员组队参与的国际赛事,于1980 年在美国举办了第一届赛事。
比赛的目的是设计、制造一辆小型的高性能赛车。
目前美国、欧洲和澳大利亚每年都会定期举办该项赛事。
比赛由三个主要部分组成:工程设计、成本以及静态评比;多项单独的性能试验;高性能耐久性测试。
Formula SAE 发展的初衷是想创立一个小型的道路赛车比赛,而现在已经发展成为一个拥有大约20 竞赛因素的大型比赛,参与者包括赛车和车队。
Formula SAE 向年轻的工程师们提供了一个参与有意义的综合项目的机会。
由参与的学生负责管理整个项目,包括时间节点的安排,做预算以及成本控制、设计、采购设备、材料、部件以及制造和测试。
Formula SAE 为在传统教室学习中的学生提供了一个现实的工程经历。
Formula SAE 队员在这个过程中将会经受考验,面对挑战,培养创造性思维和实践能力。
出于此项比赛的宗旨,参赛学生们是被一个假象的制造公司雇佣,让他们制造一辆原型车,用于量产前的各项评估。
目标市场就是那些会在周末去参加高速穿障比赛(Autocross)的非专业车手。
因此,这些赛车在加速、制动、和操控性方面要有非常好的表现。
它们要造价低廉、便于维修并且足够可靠。
另外,这些赛车的市场竞争力会因为一些附加因素,比如美观、舒适性和零件的兼容性而得到提升。
制造公司日产能力要达到4 辆,并且原型车的造价要低于25,000 美元。
对于设计团队来说,挑战在于要在一定的时间和一定的资金限制下,设计和制造出最能满足这些目的的原型车。
每一项设计将会与其他的设计一起参与比较和评估从而决出最佳整车。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录1.课题描述 (2)1.1.问题描述 (2)1.2.本课程设计的具体内容 (3)2.设计过程 (5)2.1.总体尺寸确定和优化 (5)2.1.1.总体几何尺寸及基本参数的选择与确定 (5)2.1.2.导向机构和转向梯形机构的运动学设计 (5)2.1.3.转向机构几何参数的确定及优化 (5)2.1.4.用ADAMS软件对导向机构和转向机构进行优化 (7)2.2.悬架弹性元件和阻尼元件的结构选型和参数计算 (14)2.3.悬架导向机构的受力分析和主要承载构件的设计选型与强度核算 (15)2.3.1.导向机构各杆件进行受力分析 (15)2.3.2.驱动半轴、轮毂、转向节结构尺寸计算及选型 (17)2.3.3.悬架球铰、橡胶弹性铰及弹性缓冲快的结构类型 (20)2.3.4.双横臂独立悬架导向机构结构装配图的绘制 (21)3.设计心得 (22)4.参考文献 (23)双横臂独立悬架-转向系统的分析与设计课题描述一、 问题描述图1所示为汽车前轮采用的一种双横臂悬架-转向系统机构示意图(简化),导向机构ABCD 由上横臂AB 、转向主销BC 和下横臂CD 及车架AD 构成。
其中,A 、D 分别为上、下横臂与车架联接的铰销中心(假定两铰销轴线均平行于车辆纵向),B 、C 分别为转向主销BC 与上、下横臂联接的球铰中心。
在车辆横向垂直平面内,上、下横臂相对水平面的摆角分别用ϕ、ψ表示,转向主销内倾角用β0表示。
转向传动机构采用由齿轮-齿条转向器驱动的断开式转向梯形机构GFE E 'F 'G '(F '与F ,G '与G 对称,未画出)。
其中,左轮转向梯形机构EFG 由齿轮-齿条转向器输出齿条EE '、左轮转向横拉杆EF 、左轮转向节臂FG 及车架构成。
E 、E '分别为转向器齿条上与左右转向横拉杆铰接的球铰中心, F 为左轮转向横拉杆EF 与左轮转向节臂FG 铰接的球铰中心,G 为左轮转向节臂FG 与左轮转向主销BC 连线的交点,且FG ⊥BC 。
另外,车轮轴线KH 与转向主销BC 交于H ,与车轮中心面交于J 。
描述悬架ABCD 导向机构运动学的机构几何参数主要有:上横臂杆长AB=h 1,转向主 (后视图)(地面) ' 前 后销球铰中心距BC= h2,下横臂杆长CD=h3,上、下横臂的摆角ϕ、ψ(横臂向外下倾时,取负值),转向主销内倾角β0。
为简便计,不考虑主销后倾角的影响,并假设上、下横臂与车架铰接的轴线均平行于车辆纵向,则图示导向机构ABCD的上、下横臂AB、CD和转向主销轴线BC将始终在过前轮轴线的汽车横向垂直平面内运动。
在水平面俯视图中,描述EFG左轮转向梯形机构运动学的机构几何参数主要有:EE'=L1,EF= L2,FG= L3,车架上齿条移动方向线EE'与前轮轴线的偏移距Y(轴线在前方时,取正值),转向节臂FG相对于汽车纵向的安装角α0。
另外,左右车轮的转向角分别用α、β表示。
双横臂独立悬架系统的弹性元件可采用螺旋弹簧或扭杆弹簧,阻尼元件常用筒式减振器。
根据整车结构布置,弹簧和阻尼元件通常安装于下横臂与车架(车身)之间,但也有安装于上横臂与车架(车身)之间的情形。
因此,导向机构各构件及各连接铰点的受力大小与方向,与弹簧元件的类型和安装位置密切相关。
双横臂悬架-转向系统的设计一般包括以下内容:1.转向机构的运动学设计和零部件结构设计2.悬架导向机构的运动学设计和零部件结构设计3.悬架弹性元件和阻尼元件的结构选型和设计计算4.必要的受力分析和零部件结构强度计算5.绘制系统总成装配图和零部件图二、本课程设计的具体内容试按上述悬架结构型式,设计某前轮驱动的微型汽车双横臂前悬架-转向系统,其参数选择范围如下:轮距B=1200~1400mm,轴距L=2000~2500 mm。
满载时整车总质量为m=1000~1300kg,最高车速V max=140km/h,最大爬坡度20%,0-100 km/h加速时间不超过14秒,最小转向半径R min =4000~4500mm。
前轮轮胎外径为2R=520mm,轮胎宽度b=145 mm。
导向机构几何参数:AB=h1=160~200mm,BC=h2=200~300mm,CD= h3 =330~380mm,JH=80~110mm,BH=90~150mm,车辆处于满载平衡位置时,前悬架导向机构的位置参数为ϕ=2~6︒,ψ=2︒~10︒,β0=7~10︒。
转向机构几何参数:EE'=L1=50~580mm,EF=L2=180~500mm,FG= L3=100~140mm,Y=-80~80mm,BG=80~130mm,齿条左右移动行程为s=±50~70 mm。
转向节臂安装角α0=175~190︒,转向梯形机构的最大压力角αmax=45~50︒。
要求每个学生完成以下课程设计内容:1.导向机构和转向梯形机构的运动学设计(1)在上述参数范围内,独自选取一组整车参数和导向机构几何参数(比如,B=1250 mm,L=2050 mm,,单轮簧载质量W=300 kg,最高车速V max=140km/h,最大爬坡度20%,最小转向半径R min=4050 mm;h1=180mm,h2=280mm,h3=340mm,JH=90mm,BH=140mm,BG=110 mm ,ϕ=2︒,ψ=3.5︒,β0=8︒。
最大压力角αmax=48︒)。
(2)将转向梯形机构GFE E'F'G'近似看成水平面内的平面连杆机构,根据所选轴距、轮距、最小转向半径要求、最大压力角和转向节臂安装角的限制条件,在适当的转向器行程范围内(比如s=±60 mm),按阿克曼转向几何学原理,通过优化设计方法确定转向机构其它几何参数:L1、L2、L3、Y和α0。
并绘出左右车轮转向角关系的理论曲线和实际曲线;(3)按比例画出上述导向机构和转向梯形机构运动简图。
(4)附加选择题(可不做):运用三维CAD/CAE软件等工具(如ADAMS),建立上述导向机构和转向梯形机构的机构运动学仿真模型,分析车轮从满载平衡位置上下跳动(比如, 60 mm)时,车轮定位参数前轮外倾角、前束和轮距的变化情况,绘出变化曲线。
如果变化太大,进行机构改进设计。
2.悬架弹性元件和阻尼元件的结构选型和参数计算(5)根据单轮簧载质量W和汽车平顺性要求,确定悬架等效刚度和等效阻尼参数,并绘制它们随车轮上下跳动时的变化曲线;(6)按满载平衡位置时的悬架等效刚度和等效阻尼参数,根据实际弹性元件和阻尼元件的安装位置,换算确定弹簧刚度和减振器参数(阻尼系数、拉伸和压缩行程)。
3.悬架导向机构的受力分析和主要承载构件的结构设计与强度核算(7)考虑动载系数、紧急制动或紧急转向制动等恶劣工况,对悬架导向机构各杆件进行受力分析,确定各铰接点的受力大小和方向,为导向机构杆件形状和各铰接点的结构设计提供理论依据。
(8)根据上述受力分析结果,进行导向系各构件的结构设计和强度验算,选择合理的承载结构、杆件截面形状和铰接形式。
结构设计时要灵活运用结构轻量化设计原理,并考虑制造工艺的可行性。
选用球铰时,一定要确认它的结构是受拉式还是受压式,以免用错。
上、下横臂与车架间支承铰可采用橡胶弹性铰,以提高悬架的隔振性能。
(9)按车轮载荷和全浮式驱动半轴计算转矩,确定驱动半轴直径及与之相连接的轮毂结构尺寸,并选择合适的轮毂轴承,进行驱动桥转向节结构设计。
(10)绘制上述双横臂前悬架系统总成及主要零部件(如上下横臂、转向节、支承铰销等)结构设计图。
(11)附加题选择题(可不做):完成上述悬架与转向系统的三维CAD模型(UG或CATIA等),导入ADAMS环境,考察各构件运动干涉情况和车轮随悬架上下跳动的运动姿态变化。
设计过程一、总体尺寸确定和优化1.1. 总体几何尺寸及基本参数的选择与确定按照题目要求选定一组基本尺寸参数满载质量为m=1200kg,最高车速=140km/h,最大爬坡度20%,选用轮胎宽度145mm,轮胎半径260mm,轮距B=1200mm,轴距L=2300mm,单轮簧载质量为300kg。
1.2. 导向机构和转向梯形机构的运动学设计对于导向机构几何参数的选择:为简化设计过程将上下横臂水平放置,如下图最好能够b所示;同时将上下摆臂轴线在纵向也布置成水平,另外取消主销的后倾角和车轮的前束和外倾。
因此只是考虑了主销的内倾角。
在参数范围内,初步选取一组整车参数和导向机构几何参数。
悬架导向机构基本参数为:上横臂AB=190mm,下横臂CD=360mm,转向主销BC=250mm ,另外JH=100mm,BH=120mm。
满载平衡位置时,导向机构位置参数取ϕ=4︒,ψ=5︒,β=9︒。
1.3.转向机构几何参数的确定及优化将转向梯形机构GFE E'F'G'近似看成水平面内的平面连杆机构,根据所选轴距、轮距、最小转向半径要求、最大压力角和转向节臂安装角的限制条件,在适当的转向器行程范围内(比如s=±60 mm),按阿克曼转向几何学原理,通过优化设计方法确定转向机构其它几何参数:L1、L2、L3、Y和α0。
并绘出左右车轮转向角关系的理论曲线和实际曲线;忽略主销后倾角的影响。
转向器采用齿轮齿条式,其齿条左右球较之中心距'550=,齿条左右行程S=60mmEE mm±。
转向机构基本参数:EE'= L1=500mm,EF= L2=250mm,FG= L3=120mm,Y=50mm,BG=120mm,齿条左右移动行程为s=±60 mm。
转向节臂安装角α0=180°,转向梯形机构的最大压力角αmax =45~50°。
四轮汽车转向示意图上图所示为四轮汽车转向示意图。
为了避免汽车转向时产生路面对汽车行驶的附加阻力和轮胎过快磨损,要求所有车轮在汽车转向时都作纯滚动。
因此,图中左右前轮转向角α和β应满足所谓的Ackermann转向几何学关系cotα=cotβ-B/L式中α---内侧车轮转角β---外侧车轮转角B---左右前轮转向主销轴线与地面交点之间的距离L---汽车轴距R---转向半径根据以上原理,使用陈辛波教授编写的《断开式转向梯形机构(齿轮齿条)优化设计》程序对所选的转向机构进行优化。
依靠本程序对所选的转向机构进行优化,使其尽量配合本车的尺寸,满足本车的转向,悬架及其他各项要求。
考虑到悬架上下跳动时,可能产生转向系统的干涉使车轮的定位参数发生变化,因您此设计中L2和L3的长度不宜取的太小。
现初选L2的在300~400之间,L3在110~130之间。
另外考虑到制动盘的空间布置,转向节臂安装角α0一般要控制在190︒以内。