双横臂独立悬架设计计算说明书
汽车双横臂扭杆弹簧独立悬架设计

汽车双横臂扭杆弹簧独立悬架设计崔敏【摘要】This paper is mainly to analysis a light truck’s computing method of the front independent suspension design and testing of design experiment. Firstly, it goes with the stress analysis and the trajectory calculation of the double wishbone independent suspension, and then continues with the suspension design calculation such as the design of torsion bar spring , front suspension’s stiffness, offset frequency calculation, stabilizer bar’s design, roll stiffness calculation, shockabs orber’s design, and finally the suspension offset frequency and riding comfort can be verified through the test.%文章主要研究某轻型载货汽车前独立悬架的设计计算方法以及独立悬架的设计试验验证,首先对双横臂式独立悬架进行受力分析、运动轨迹计算,然后对悬架进行设计计算如扭杆弹簧的设计、前悬架的刚度、偏频计算、稳定杆的设计、侧倾刚度计算、减震器的设计,最后通过试验验证悬架的偏频、平顺性。
【期刊名称】《汽车实用技术》【年(卷),期】2016(000)006【总页数】4页(P11-14)【关键词】轻型载货汽车;双横臂式独立悬架;平顺性【作者】崔敏【作者单位】安徽江淮汽车股份有限公司技术中心,安徽合肥 230601【正文语种】中文【中图分类】U463.33+210.16638 /ki.1671-7988.2016.06.005CLC NO.: U463.33+2 Document Code: A Article ID: 1671-7988 (2016)06-11-04悬架是现代汽车上的一个重要总成,他把车架与车轴弹性地连接起来。
272 双横臂独立悬架的设计

双横臂独立悬架的设计
作者: 导师:
QQ 64134703
主要设计内容
§ (1)对双横臂独立悬架的各主要部件如减振 器、横向稳定器、螺旋弹簧和导向机构进行选 型设计分析。 (2)用UG完成双横臂独立悬架的三维实体模 型。 (3)将悬架UG三维实体模型转换为CAD二 维图纸,完成两张A0设计图纸的图量。
QQ 64134703
二 对悬架提出的设计要求
1)保证汽车有良好的行驶平顺性。 2)具有合适的衰减振动能力。 3)保证汽车具有良好的操纵稳定性。 4)汽车制动或加速时要保证车身稳定,减少车身纵倾;转弯 时车身侧倾角要合适。 5)有良好的隔声能力。 6)结构紧凑、占用空间尺寸要小。 7)可靠地传递车身与车轮之间的各种力和力矩,在满足零部 件质量要小的同时,还要保证有足够的强度和寿命。
f
c1
5 = n 1
2
5 = 1
2
= 250
mm
QQ 64134703
刚度:
P 416 3 C1 = = = 1.7kg / mm = 16.66 × 10 N / mm f c1 250
QQ 64134703
二、转向轮定位参数
主销后倾角 :γ 主销内倾角 :β 前轮外倾角 :α 前轮前束 :(A-B)
QQ 64134703
储油筒直径 Dc=1.45D=1.45×40=58mm 前减振器的安装角α=18°; 根据QC/T491—1999《汽车 筒式减振器 尺寸系列及技术 条件》中规定的,取 L2=140mm,外径 D1=65mm,外径 D2=75mm,活塞行程 S=120mm。 GH型减振器
QQ 64134703
5.7双横臂悬架设计
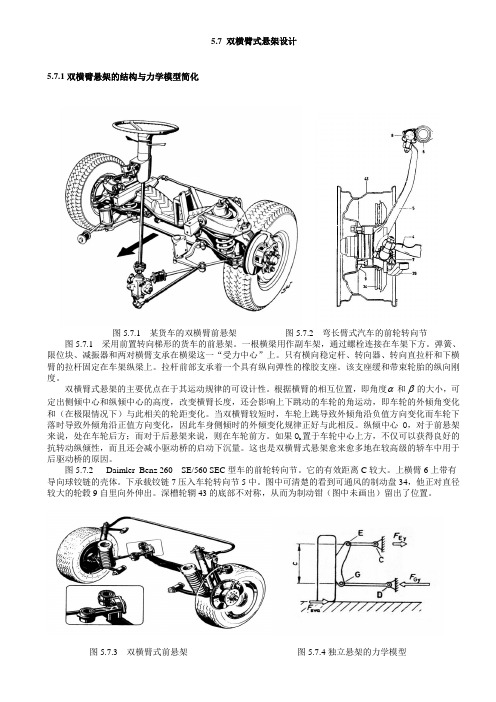
5.7 双横臂式悬架设计5.7.1双横臂悬架的结构与力学模型简化图5.7.1 某货车的双横臂前悬架图5.7.2 弯长臂式汽车的前轮转向节图5.7.1 采用前置转向梯形的货车的前悬架。
一根横梁用作副车架,通过螺栓连接在车架下方。
弹簧、限位块、减振器和两对横臂支承在横梁这一“受力中心”上。
只有横向稳定杆、转向器、转向直拉杆和下横臂的拉杆固定在车架纵梁上。
拉杆前部支承着一个具有纵向弹性的橡胶支座。
该支座缓和带束轮胎的纵向刚度。
双横臂式悬架的主要优点在于其运动规律的可设计性。
根据横臂的相互位置,即角度α和β的大小,可定出侧倾中心和纵倾中心的高度,改变横臂长度,还会影响上下跳动的车轮的角运动,即车轮的外倾角变化和(在极限情况下)与此相关的轮距变化。
当双横臂较短时,车轮上跳导致外倾角沿负值方向变化而车轮下落时导致外倾角沿正值方向变化,因此车身侧倾时的外倾变化规律正好与此相反。
纵倾中心O,对于前悬架来说,处在车轮后方;而对于后悬架来说,则在车轮前方。
如果O h置于车轮中心上方,不仅可以获得良好的抗转动纵倾性,而且还会减小驱动桥的启动下沉量。
这也是双横臂式悬架愈来愈多地在较高级的轿车中用于后驱动桥的原因。
图5.7.2 Daimler_Benz 260 SE/560 SEC型车的前轮转向节。
它的有效距离C较大。
上横臂6上带有导向球铰链的壳体。
下承载铰链7压入车轮转向节5中。
图中可清楚的看到可通风的制动盘34,他正对直径较大的轮毂9自里向外伸出。
深槽轮辋43的底部不对称,从而为制动钳(图中未画出)留出了位置。
图5.7.3 双横臂式前悬架图5.7.4独立悬架的力学模型图5.7.3 Daimler_Benz 牌260 SE/560 SEC型车的前悬架。
为了使得主销偏移距r s=0mm时,可通风的制动盘具有较大的直径,该悬架的下承载铰链必须大致位于车轮中心处。
拉伸和压缩行程限位块布置在充气的单筒式减振器中。
先后伸出的支撑杆支撑着一根附S的隔音横梁。
(完整版)SUV轿车悬架系统设计说明书毕业设计
以下文档格式全部为word格式,下载后您可以任意修改编辑。
摘要随着汽车工业和减振器行业的发展以及生活条件的改善,人们对汽车的要求已经不仅仅局限于通行,乘客对汽车的运动性也提出了更高的要求。
在这种市场需求下一种兼具城市行走、野外运动,极其符合现代年轻人追求强烈个性的心态的SUV轿车应运以而生。
SUV能适应各种路况,而且对于悬架的舒适性和操纵稳定性也有更高的要求。
这次设计的SUV轿车悬架系统也是为了适应发展当前的这种实际的需要而设计。
本次设计主要研究SUV轿车的前、后悬架系统的结构设计。
前悬架采用目前较流行的麦弗逊式独立悬架系统,后悬架采用舒适性较好的二连杆式非独立悬架。
前、后悬架的减振器均采用双向作用式筒式减振器。
这种结构的设计,有效的提高了乘座的舒适性和驾驶稳定性。
在此次设计中还进行了悬架参数的确定、弹性元件的设计计算、导向机构和横向稳定杆的结构计算及强度校核。
而且,采用Matlab软件对悬架系统的平顺性性进行了编程分析,论证了该系统设计方案的合理正确性,能够满足工程实际的需要。
本设计对于提高汽车行驶平顺性、操纵稳定性等问题具有一定的的实际意义。
此外对于汽车生产企业悬架设计,具有一定的参考价值。
关键词:独立悬架;非独立悬架;汽车减振器;平顺性;ABSTRACTAs the auto industry and the shock absorber and the development of the industry to improve the living conditions of people in the car such a market demand of both urban walking, field sports, in line with modern young people to pursue an extremely strong personality of the mentality of SUV cars to be shipped and Health. SUV can adapt to all kinds of traffic, but also for suspension of comfort and of the SUV car suspension system is also in order to meet the current development of the actual needs of such a design.The design of major research SUV cars before and after the suspension system of structural design. Before the current suspension of the more popular Maifuxunshi independent suspension system, rear suspension better use of comfort-two-link independent suspension. Before and after the suspension of the shock absorber and effective use of the improved comfort and driving stability. Also in the design of a suspension parameters of the flexibility of the design elements, the orientation and structure of the calculation and strength checking. Moreover, the use of Matlab software on the ride suspension system of a programming analysis, demonstration of the system design of reasonable accuracy, to meet the actual needs.The design for improving the car on ride comfort, addition to auto enterprises suspension design, with some reference value.Key words: independent suspension; dependent suspension;automobile shock absorber; ride comfort;目录第1章绪论 (1)1.1悬架系统概述 (1)1.2课题研究的目的及意义 (3)1.3课题研究的主要内容 (4)第2章前、后悬架结构的选择 (4)2.1独立悬架结构特点 (4)2.2非独立悬架结构特点 (6)2.3前后悬架结构方案 (7)2.4辅助元件 (10)2.4.1横向稳定器 (10)2.4.2弹性元件 (10)第3章技术参数确定与计算 (11)3.1自振频率 (11)3.2悬架刚度 (11)3.3悬架静挠度 (11)3.4悬架动挠度 (12)第4章弹性元件的设计计算 (13)4.1前悬架弹簧(麦弗逊悬架) (13)4.1.1螺旋弹簧的端部形状 (13)4.1.2螺旋弹簧的参数计算 (13)4.1.3弹簧圈数 (14)4.2后悬架弹簧(二连杆悬架) (14)4.2.1螺旋弹簧的参数计算 (14)4.2.2弹簧圈数 (15)第5章减振器设计 (16)5.1减振器概述 (16)5.2减振器分类 (16)5.3减振器主要性能参数 (17)5.5.1相对阻尼系数 (17)5.5.2减振器阻尼系数 (18)5.4最大卸荷力 (18)5.5筒式减振器主要尺寸 (18)5.5.1筒式减振器工作直径 (18)5.5.2油筒直径 (19)第6章横向稳定器设计 (19)第7章平顺性分析 (21)7.1平顺性概念 (21)7.2汽车平顺性的研究方法 (21)7.3汽车振动系统模型的建立 (22)7.4平顺性的评价方法 (24)7.5影响平顺性的因素 (25)第8章结论 (26)参考文献 (27)致谢 (28)附录Ⅰ (29)附录Ⅱ (41)第1章绪论1.1悬架系统概述近年来,舒适性问题对于汽车企业的要求逐年提高,影响舒适性的主要因素有操纵稳定性和乘坐舒适性等因素。
双横臂独立悬架设计毕业设计说明

双横臂独立悬架设计摘要双横臂式独立悬架,是一种车轮在汽车横向平面内摆动的独立悬架,这种独立悬架被广泛应用在轿车前轮上。
双横臂式独立悬架按上、下横臂是否等长,又分为等长双横臂式和不等长双横臂式两种悬架。
等长双横臂式悬架在车轮上下跳动时,能保持主销倾角不变,但轮距变化大(与单横臂式相类似),造成轮胎磨损严重,现已很少用。
对于不等长双横臂式悬架,只要适当选择、优化上下横臂的长度,并通过合理的布置,就可以使轮距及前轮定位参数变化均在可接受的限定范围内,这种结构有利于减少轮胎磨损,提高汽车行驶平顺性和方向稳定性,保证汽车具有良好的行驶稳定性。
目前不等长双横臂式悬架已广泛应用在轿车的前后悬架上,部分运动型轿车及赛车的后轮也采用这一悬架结构。
本次课题设计根据悬架系统设计的基本要求和给定的参数,完成了双横臂独立悬架的设计。
关键词:汽车;双横臂独立悬架;螺旋弹簧;减振器The design of double-wishbone independent suspensionAbstractDouble wishbone-type independent suspension, of which the wheels swing in a horizontal plane in the car, an independent suspension that has been widely used in cars on the front.Double wishbone-type independent suspension in accordance with the upper and lower arm length, etc. are also divided into equal length double wishbone and a long range two-type double wishbone suspension. Such as long double wishbone suspension in the wheel up and down beat, the kingpin inclination to maintain the same, but changes in Tread large (with a single arm is similar), resulting in severe tire wear, is now seldom used. The length double wishbone suspension, as long as the appropriate choice, to optimize the length of upper and lower arm, and a reasonable layout, you can make Tread and the front wheel alignment parameters are within acceptable limits the scope of this structure helps to reduce tire wear and improve vehicle ride comfort and directional stability, and ensure the car has a good driving stability. The current length double wishbone suspension has been widely used in the front and rear suspension cars, some sports and racing cars of the rear wheel is also used in this suspension structure.The subject of the design of suspension system design complete a double wishbone- independent suspension design in accordance with the basic requirements and the given parameters .Keywords: Vehicle; Double-wishbone suspension; Coil spring; Shock absorbers目录摘要 (I)Abstract (II)绪论 (1)第一章悬架概述 (2)1.1 悬架设计的要求 (3)1.2 悬架对汽车性能的影响 (3)1.2.1 悬架对汽车行驶平顺性的影响 (3)1.2.2 悬架对汽车行驶稳定性的影响 (5)第二章独立悬架及弹性元件的结构形式与分析 (7)2.1 独立悬架的结构型式与分析 (7)2.2 弹性元件的特定分析比较 (8)第三章螺旋弹簧悬架设计 (10)3.1 悬架基本参数的选定 (10)3.1.1 悬架静挠度 (10)3.1.2 上下横臂长度的确定 (11)3.1.3 簧载质量的确定 (11)3.1.4 其他参数的确定 (11)3.2 螺旋弹簧的选择 (12)3.3 减振器的选择 (14)3.3.1 减振器类型的选择 (14)3.3.2 减振器主要参数的选择 (15)3.4 接头 (17)谢辞 (19)参考文献 (20)附录A外文翻译-原文部分 (21)附录B 外文翻译-译文部分 (36)附录C 实体图 (46)绪论随着社会经济和物质文化生活水平的提高,人们对汽车行驶的平顺性、操纵稳定性及安全性提出了愈来愈高的要求。
双横臂独立悬架导向机构的设计计算

┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊目录第一章绪论 (3)1.1 国内外技术现状和发展趋势 (3)1.2 悬架概述 (3)1.3双横臂独立悬架简介 (5)1.4悬架几何参数及其对车辆性能的影响 (8)1.4.1汽车操纵稳定性的重要性 (8)1.4.2悬架系统几何参数对汽车操纵稳定性的影响 (8)1.4.3车轮定位参数的主要研究内容 (9)第二章建立双横臂悬架模型的理论基础 (10)2.1 汽车多体系统分析软件介绍 (10)2.1.1 ADAMS一些模块介绍 (11)2.1.2 ADAMS软件的特点 (12)2.2用ADAMS/CAR建模分析要点 (13)2.2.1 关于悬架测试台 (13)2.2.2. 悬架分析过程 (14)2.2.3 悬架分析的类型 (14)第三章双横臂悬架模型的建立 (16)3.1 双横臂式独立前悬架模型的建模数据 (16)3.1.1已知的参数 (17)3.1.2引用ADAMS/Car自带的标准文件 (18)3.2前双横臂独立悬架模型的建立 (21)3.2.1悬架的建模原理 (22)3.2.2前悬架总成的所有组成部件 (22)3.2.3悬架子系统的建立 (23)3.2.4转向系统模型的建立 (23)3.2.5悬架试验台及轮胎仿真模型 (23)3.2.6悬架总成的建立 (24)┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊3.3本章小结 (28)第四章悬架的仿真分析与优化设计 (30)4.1独立悬架性能评价指标及评价方法总述 (30)4.2仿真实验的方案 (31)4.3独立悬架运动学与弹性运动学特性的仿真 (33)4.3.1前轮外倾角 (34)4.3.2前束角 (35)4.3.3主销后倾角与主销后倾拖距 (36)4.3.4主销内倾角和主销偏移距 (37)4.3.5轮距的变化 (38)4.3.6制动点头量和加速上仰量 (39)4.3.7悬架刚度和侧倾角刚度 (40)4.3.8侧向力引起的各种顺从转向 (41)4.3.9侧倾转向、干涉转向 (42)4.3.10侧倾后倾系数、侧倾转向 (44)结论 (44)4.4本章小结 (45)第五章全文总结 (46)致谢 (47)参考文献 (48)┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊┊┊┊┊┊┊第一章绪论1.1 国内外技术现状和发展趋势自20世纪90年代起,各主要发达国家在汽车产品设计开发领域中广泛采用信息技术、计算机技术、CAD/CAE/CAM/PDM技术、KBE(Knowledge BasedEngineering)技术等先进手段,使设计水平大为提高,新车型的开发周期大大降低。
汽车独立悬架设计说明书(毕业设计)
独立悬架设计说明书摘要本设计主要讲述了悬架的定义和重要性,描述了悬架的作用和功能主要阐述了独立悬架的类别和构造尤其是详细的介绍了麦弗逊式独立悬架的设计过程,本着满足车辆行使平顺性的原则,设计了麦弗逊式独立悬架的各个组成部件,并对其进行了校核。
如螺旋弹簧的设计和计算,横向稳定杆的设计,对导向机构进行了平顺性分析,横摆臂的长度计算和减震器的设计计算等。
轿车悬架是一个较难达到完美要求的汽车总成,这是因为悬架既要满足汽车的舒适性要求,又要满足其操纵稳定性的要求,而这两方面又是互相对立的。
比如,为了取得良好的舒适性,需要大大缓冲汽车的震动,这样弹簧就要设计得软些,但弹簧软了却容易使汽车发生刹车“点头”、加速“抬头”以及左右侧倾严重的不良倾向,不利于汽车的转向,容易导致汽车操纵不稳定等。
怎样处理好这些方面的关系就摆在了我们设计人员的面前。
因此要是能够设计出使这些方面都能达到一个和谐的悬架对越来越多的汽车使用人员来说将会带来极大的好处。
他们将会体会到优秀悬架带给他们的良好的舒适性,和安全的平顺性。
希望本人的设计能够满足大家的要求。
本设计的图纸主要由计算机绘制完成,计算机编档、排版,打印出图及论文。
还完成了一定量的英文翻译工作。
关键词:麦弗逊式独立悬架悬架汽车悬架AbstractThe main design on the suspension of the definition and importance of a suspension described the role and functions primarily on the type of independent suspension and tectonic particularly detailed introduced Maifuxun independent suspension design process, in the spirit of the exercise smoothly vehicles meet the principles of the design of the independent suspension Maifuxun various components, and the degree of their. If screw spring-loaded design and calculation, horizontal designed to guide agencies conducted smoothly and analytical, Wang squatting length calculation and shock absorber design.Training is a perfect car for the car more difficult to achieve fuel, because it is necessary to meet the suspension of vehicle comfort, but also meet the requirements of the stability of its manipulation, and these two aspects are mutually antagonistic. For example, in order to achieve good sexual comfort, require a significant buffer car shock, which is designed spring-loaded soft farther, but the spring-loaded soft but easy to vehicle braking occurred "nod" and accelerate the "rise" and so serious adverse trends, to the detriment of the vehicle to easily lead to vehicle instability manipulation. How to handle the relationship between these areas before our designers have to face the problem .So if these meet the mission to design a harmonious suspension of a growing number of vehicles involved will bring great benefits. They will understand theiroutstanding suspension to the comfort of a good, and safe smoothly. I hope the design can satisfy all requirements.The design drawings completed mainly by computer mapping, computer archiving, typesetting, printing out maps and papers. Also completed a number of English translation work.Keyword:Maifusun type of independent suspension suspension Motor Training1概述1.1 悬架的定义及其重要性悬架是保证车轮与汽车承载之间具有弹性联系并能传递载荷、缓和冲击、衰减振动以及调节汽车行驶中的车身位置等有关装置的综总称。
汽车双横臂独立悬架的运动学分析和计算_戴旭文
收稿日期:20010711作者简介:戴旭文(1969-),男,吉林市人,硕士研究生,研究方向为汽车车身设计.文章编号:10094687(2002)02002905汽车双横臂独立悬架的运动学分析和计算戴旭文, 谷中丽, 刘 剑(北京理工大学车辆与交通工程学院,北京 100081)摘 要:利用机构运动学中的坐标变换以及数值计算的方法对汽车双横臂独立悬架系统进行运动学分析,从而建立悬架系统结构的运动模型.实例的优化结果表明,将传统机构学方法与现代数值计算方法相结合,使悬架设计的更为精确和清晰,提高了工作效率.关键词:双横臂独立悬架;导向机构;运动学分析中图分类号:U 463 33+1 文献标识码:A1 引 言采用双横臂独立悬架的车辆具有良好的行驶平顺性和操纵稳定性,所以在现代汽车上得到广泛应用.通常情况下,在汽车设计过程中对前轮独立悬架导向机构的设计要求如下[1]: 当车轮与车身产生相对运动时,保证轮距变化在一定的范围之内( 4 0m m),以免轮胎过早磨损; 当车轮上下跳动时,前轮定位参数要有合理的变化特性,不应产生纵向加速度. 转弯时,应使车轮与车身倾斜方向相同,增加汽车的不足转向效应.双横臂独立悬架的布置是空间的,机构的空间运动分析过程比较复杂,计算量很大.传统设计一般采用经验设计、查表法以及作图等方法,设计虽然可以基本满足要求,但精度和效率不高.作者建立了悬架机构的运动模型,简化了运动分析过程;数值计算模型的建立和计算机的使用,减轻了手工计算量,提高工作效率.2 双横臂独立悬架的导向机构运动学分析典型的双横臂独立悬架导向机构如图1所示.为了简化分析,图中略去了转向节臂.A ,D 分别为上、下横臂的回转中心点,主轴销通过B ,C 两个球面副与上下横臂相连接.1、2、3、4杆组成的空间机构,是由A ,D 两个转动副与车身相连组成的一个典型RSSR 闭环空间机构.2 1 系统的上横臂输入 2与下横臂输出 1按照Denavit Hartenberg 坐标系的规定[2],取坐标系如图1.k 1,k 4轴分别与转动副的轴线重合,k 2与k 1平行( 2=0)且通过球面副B 的中心,k 3轴通过主销球头的中心.另外取两个回转轴的公垂线为i 1,通过球心B 垂直于k 1与直线i 2.2002年第2期车 辆 与 动 力 技 术V ehicle &Pow er T echnolog y 总第86期图1 双横臂独立悬架导向机构简图DC 下横臂;BC 主轴销;A B 上横臂;JQ 车轮轴;A ,D 转动副;B ,C 球副;Q 车轮中心;G 接地点机构的位姿方程:E k 2E i 2E 23E 34E k 1E i 1=I,(1)其中 E 12,E 23,E 34,E 41为欧拉变换,分别为 1, 2, 1, 2的函数;I 为单位阵.由于 2=0,从而E i 2=I ,式(1)简化为:E k 2E 23E 34E k 1E i 1=I ,(2)根据机构运动学[2]可知:P = m j=1(h j i j +s j k j )=h 1i 1+s 1k 1+h 2i 2+l k 3+h 4i 4-s 4k 4=0,(3)参数代入、化简可得:A 1sin 1+A 2cos 1+A 3=0,(4)其中 A 1=s 1h 4sin 1-h 2h 4sin 2cos 1, A 2=h 1h 4+h 2h 4cos 2,A 3=12(s 24+h 21+s 21+h 22+h 24-l 2)-s 4s 1cos 1+h 1h 2cos 2-s 4h 2sin 1sin 2.进一步求解得到:1=2arctan A 1 A 21+A 22-A 23A 2-A 3.(5)式(5)描述了上横臂的角输入 2与相应的下横臂的角输出 1之间存在的确定的函数关系,通过式(5)可以对整个导向机构进行运动学分析、计算.2 2 主销两球头坐标的求解由机构运动学原理可知,设有某一任意轴 方向向量为: =( 1, 2, 3),那么绕 回转的变换矩阵为E ,则主销两端B ,C 两点的坐标为:B =E ( 1-C =E ( 2-(6)30 车辆与动力技术 2002年其中 01, 02,B 0,C 0是初始值.B ,C 的坐标求出后,设 =|BJ |/|BC |,车轮回转中心点J 的坐标J =(1- )B + C.J 点是悬架导向机构和车轮的理论连接点,它的确定是进一步分析车轮运动的基础.3 汽车车轮部分的运动分析3 1 车轮中心点Q 的坐标求解第一步先求解出转向节臂的回转中心H 点的坐标.将B -C -J -Q -G 从图1中分离出来,见图2.H 点的运动具有以下的约束条件:图2 车轮及转向节IH 转向拉杆;JH 转向节臂;H ,I 球副|HJ |=con st 1|HB |=con st 2|HI |=con st 3,(7)其中 con st 1,con st 2,con st 3可以根据系统的初始条件获得.B ,I ,J 点的坐标均已在上面求出,所以式(7)是三元二次方程组.利用数值解法[3]解得H 点的坐标:(H X ,H Y ,H Z ).同理,由于Q 点到B ,C,H 的距离不变,所以存在下列方程组:|QH |=con st 4|QB |=con st 5|QC |=con st 6,(8)其中 con st 4,con st 5,con st 6可以根据系统的初始条件获得.解之得Q 点的坐标:(Q X ,Q Y ,Q Z ).3 2 车轮接地点G 的坐标求解设车轮平面的方向向量n =(a ,b,c)T ,根据汽车结构的特点,车轮平面的法线方向向量与QJ 轴的方向向量相同,且Q 点位于车轮平面内,由此可以设车轮平面的方程为:aX +b Y +cZ +d =0;另外G 点位于车轮的圆周上,车轮圆周的方程为:aX +bY +cZ +d =0(X -Q X )2+(Y -Q Y )2+(Z -Q Z )2=R 20,(9)其中 R 0为车轮半径.G 点是这个圆周上Z 坐标值最小的一点,可以利用计算机采用优化解法求得G 点的坐标.4 车轮定位参数的确定[4]31 第2期 戴旭文等:汽车双横臂独立悬架的运动学分析和计算车轮的外倾角 L Y =arctanQ Y -G Y Q Z -G Z ; 车轮的前束角 QS =arctan Q X -J X Q Y -J Y ; 轮距的变化量 =2(G X -G X 0)2+(G Y -G Y 0)2+(G Z -G Z 0)2; 车轮的纵向加速度a =G X -G X 0G Z -G Z 0a Z.汽车转向行驶时外侧车轮处于压缩行程,前束角减小;内侧车轮处于复原行程,前束角增大;车轮向汽车纵向中心转动,增加了不足转向量.从车轮的纵向位移变化幅度可以计算出车轮在跳动时的附加纵向加速度.汽车行驶过程中,车轮上下跳运时,只有主销及车轮的定位参数变化在所要求的范围内,且车轮运动与导向机构的运动彼此协调,才能保证汽车行驶过程中具有良好的操纵稳定性和平顺性.5 计算实例如图1所示的双横臂系统,建立固定在汽车车身上的直角坐标系,原点位于A 点.k 1和k 2轴在X OZ 平面中与X 轴的夹角分别为-1 5~1 5 ,6 .初始时刻A ,B ,C,D,J ,Q,H ,I 点的坐标(mm )为:A (0,0,0),B (3,281,-21 44),C (7,317,-295),D (10,-121,-238),H (154,256,-327),I (74,-151,-264),Q (8 5,419,-241),J (5 8,306,315 5).将上述坐标转化为Denav it-Hartenberg 坐标,计算车轮的定位参数.当车轮上下跳动的范围为 50mm 时:前轮外倾角的变化范围:-0 4~2 7 ;车轮前束角的变化范围:1~1 57 ;车轮横向滑移变化范围:-7 4~6 2mm ;主销内倾角的变化范围:7 5~9 ;主销后倾角的变化范围:0 65~1 ;车轮的纵向加速度为:0 076a Z .从上面的数据来看,此设计的指标不高,尤其是车轮的滑移特性很差.另外,车轮前束角和主销后倾角的变化范围有些大,总之这个设计方案不十分理想.利用上述所建的模型对所选坐标(mm)进行优化,得到:A (0,0,0),B (5 6,266,-74),C (12 7,301 8,-345),D (59,-159,-286),H (201,212,-277),I (113 3,-199,-214),Q (13 8,469,-271),J (43,291,298).优化后的设计方案(车轮上下跳动 50m m )车轮定位参数如下:前轮外倾角的变化范围:0 34~1 73 ;车轮前束角的变化范围:1 03~1 10 ;车轮横向滑移变化范围:-2 96~2 02mm ;32 车辆与动力技术 2002年主销内倾角的变化范围:6 3~9 42 ;主销后倾角的变化范围:1 34~1 84 ;车轮的纵向加速度为:0 045a Z .从所得的数据来看,虽然主销内倾角的变化范围有所增加,但是其他指标都有了一定的改善,尤其是车轮滑移特性得到了明显的提高.综合比较,第二个方案比较理想.6 结 论本文所建立的运动模型适合于RSSR 结构的各种车型双横臂独立悬架的结构参数设计,具有较高的设计精度,同时可以对各个参数进行定量及定性的分析,使设计者能够清楚地了解悬架的各种运动特性.在具体的实用软件的使用中,只需设计输入约束条件即可对机构进行运动分析和优化设计.设计者只需要了解参数的实际含义,正确确定各个约束条件即可.由于计算机的使用,可以摆脱依靠试验和查表以及经验的设计方式,不但可以提高设计效率,同时还可以提高设计的准确性.参考文献:[1] 张洪欣.汽车设计[M ].北京:机械工业出版社,1989.[2] 谢存禧,郑时雄,林怡青.空间机构设计[M].上海:上海科学技术出版社,1996.[3] 丁丽娟.数值计算方法[M].北京:北京理工大学出版社,1997.[4] 毛 明,张相麟.轮式车辆双横臂独立悬架的运动优化设计.汽车工程[J].1997(3):38-45.Kinematics Analysis and Calculation of the Double -WishboneIndependent Suspension of Wheeled -VehicleDAI Xu -w en, GU Zhong -li, LIU Jian(School of Vehicle and T r anspor tat ion Eng ineering,Beijing Institute of T echnology,Beijing 100081,China)Abstract:The article adopts the methods of coordinate conversion and numerical calculation for the kinematics analysis and calculation and then creates a model for the optionization of a double-w ishbone suspension system of w heeled-vehicle.The result of the example indicates that the combination of traditional mechanism kinematics w ith modern numerical calculation can sim plify the calculations during design,and meanw hile make the process of design more concisely and clearly.Key words:double-w ishbone suspension;guide mechanism;kinematics analysis 33 第2期 戴旭文等:汽车双横臂独立悬架的运动学分析和计算。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
双横臂独立悬架导向-转向系统的分析与设计计算说明书目录一、任务说明1.设计任务 ......................................................................... 错误!未定义书签。
2.问题描述 ......................................................................... 错误!未定义书签。
3.设计条件 ......................................................................... 错误!未定义书签。
二、双横臂独立悬架导向-转向系统的设计过程1.导向机构及转向梯形布置方案分析与优化设计 ......... 错误!未定义书签。
1.1参数选择...................................................................... 错误!未定义书签。
1.2参数优化...................................................................... 错误!未定义书签。
2.考虑导向机构非线性特征的双横臂独立悬架系统弹簧刚度、减震器阻尼参数的设计与分析方法.............................................. 错误!未定义书签。
2.1悬架导向机构参数 ..................................................... 错误!未定义书签。
2.2受力分析与阻尼参数计算 ......................................... 错误!未定义书签。
3.双横臂悬架下摆臂结构的强度设计 ............................. 错误!未定义书签。
4.全浮式半轴计算及轮毂轴承选择 ................................. 错误!未定义书签。
三、设计心得................................................. 错误!未定义书签。
四、参考资料................................................. 错误!未定义书签。
双横臂独立悬架导向—转向系统的分析与设计计算说明书(一)任务说明1.设计任务双横臂独立悬架和转向系统是现代汽车上典型的底盘总成系统。
本课程设计以某微型汽车前轮转向驱动桥所采用的双横臂独立悬架和转向系统为对象,主要完成以下环节的分析与设计内容:1.*独立设计、CAD绘制或手绘双横臂悬架系统总成装配图一张(0号或1号)➢零部件顺序编号➢明细栏、标题栏(注材料、标准件型号和数量)➢主要轮廓尺寸、特征尺寸、尺寸公差配合标注➢设计要求2.*独立设计、手工绘制转向节零件图一张➢尺寸标注完备➢尺寸链封闭➢设计基准尽量与制造工艺基准一致➢形位公差标注要注意参考基准标注➢信息完整➢材料、热处理方法的技术条件3.*独立完成设计、计算说明书一份(4000-8000字)包括内容、流程、理论方法、方案、公式、计算过程、成果归纳和设计心得等2.问题描述图1所示为汽车前轮采用的一种双横臂悬架-转向系统机构示意图(简化),导向机构ABCD由上横臂AB、转向主销BC和下横臂CD及车架AD构成。
其中,A、D分别为上、下横臂与车架联接的铰销中心(假定两铰销轴线均平行于车辆纵向),B、C分别为转向主销BC与上、下横臂联接的球铰中心。
在车辆横向垂直平面内,上、下横臂相对水平面的摆角分别用ϕ、ψ表示,转向主销内倾角用β0表示。
转向传动机构采用由齿轮-齿条转向器驱动的断开式转向梯形机构GFE E'F'G'(F'与F,G'与G对称,未画出)。
其中,左轮转向梯形机构EFG由齿轮-齿条转向器输出齿条EE'、左轮转向横拉杆EF、左轮转向节臂FG及车架构成。
E、E'分别为转向器齿条上与左右转向横拉杆铰接的球铰中心, F为左轮转向横拉杆EF与左轮转向节臂FG铰接的球铰中心,G为左轮转向节臂FG与左轮转向主销BC连线的交点,且FG⊥BC。
另外,车轮轴线KH与转向主销BC交于H,与车轮中心面交于J。
描述悬架ABCD 导向机构运动学的机构几何参数主要有:上横臂杆长AB=h 1,转向主销球铰中心距BC= h 2,下横臂杆长CD=h 3,上、下横臂的摆角ϕ、ψ(横臂向外下倾时,取负值),转向主销内倾角β0。
为简便计,不考虑主销后倾角的影响,并假设上、下横臂与车架铰接的轴线均平行于车辆纵向,则图示导向机构ABCD 的上、下横臂AB 、CD 和转向主销轴线BC 将始终在过前轮轴线的汽车横向垂直平面内运动。
在水平面俯视图中,描述EFG 左轮转向梯形机构运动学的机构几何参数主要有:EE '=L 1,EF= L 2,FG= L 3,车架上齿条移动方向线EE '与前轮轴线的偏移距Y (轴线在前方时,取正值),转向节臂FG 相对于汽车纵向的安装角α0。
另外,左右车轮的转向角分别用α、β表示。
双横臂独立悬架系统的弹性元件可采用螺旋弹簧或扭杆弹簧,阻尼元件常用筒式减振器。
根据整车结构布置,弹簧和阻尼元件通常安装于下横臂与车架(车身)之间,但也有安装于上横臂与车架(车身)之间的情形。
因此,导向机构各构件及各连接铰点的受力大小与方向,与弹簧元件的类型和安装位置密切相关。
3.技术条件(后视图) (地面) ' 前 后轮距B=1200~1400mm,轴距L=2000~2500 mm。
满载时整车总质量为m=1000~1300kg,最高车速V max=140km/h,最大爬坡度20%,0-100 km/h加速时间不超过14秒,最小转向半径R min =4000~4500mm。
前轮轮胎外径为2R=520mm,轮胎宽度b=145 mm。
导向机构几何参数:AB=h1=160~200mm,BC=h2=200~300mm,CD= h3 =330~380mm,JH=80~110mm,BH=90~150mm,车辆处于满载平衡位置时,前悬架导向机构的位置参数为ϕ=2~6︒,ψ=2︒~10︒,β0=7~10︒。
转向机构几何参数:EE'= L1=50~580mm,EF= L2=180~500mm,FG= L3=100~140mm,Y=-80~80mm,BG=80~130mm,齿条左右移动行程为s=±50~70 mm。
转向节臂安装角α0=175~190︒,转向梯形机构的最大压力角αmax=45~50︒。
(二)双横臂独立悬架导向-转向系统的设计过程一、双横臂独立悬架导向机构及转向梯形布置方案分析与优化设计1、参数选择2、转向梯形机构几何参数的优化设计1) 转向机构优化设计原理:图2 齿轮齿条转向器驱动的断开式转向梯形结构示意图设S 为转向齿条位移量(S1≤S≤S2),则对于齿轮齿条式转向机驱动的断开式转向梯形机构,容易求得左右前轮的转向角α和β如下。
0020202000C B C B A A +-++=α (1)0222arctan 2αα-+-++=C B C B A A (2)C B C B A A '+''-'+'+'-2220arctan 2 =βα (3)其中,A=-2L 3(S 0-S), B=-2L 3y, C=L 22-L 32-( S 0-S) 2-y 2A 0=-2L 3S 0,B 0=-2L 3y ,C 0=L 22-L 32- S 02-y 2A '=-2L 3(S 0+S),B '=-2L 3y,C '=L 22-L 32-( S 0+S)2-y 2L 1——转向机齿条左右球铰中心的距离;L 2——左、右横拉杆长度;L 3——左、右转向节臂长度;L w ——车轮中心至转向主销的距离;S 1——转向齿条从中心位置向左的位移量(取正值);S 2——转向齿条从中心位置向右的位移量(取负值);y ——转向齿条左右球铰中心连线与左右转向主销中心连线之偏距。
图3示位置取正值,反之取负值;S 0 ——直线行驶时,转向齿条左球铰中心和左转向主销中心的水平距离; α0——转向节臂与汽车纵轴线的夹角。
图3 四轮汽车转向示意图图3为一种含驱动滑块的常用断开式转向梯形机构。
所谓驱动滑块,实际上是齿轮齿条式转向机的齿条。
即,方向盘的转向操纵,由齿轮齿条式转向机变换为齿条(滑块)的直线运动,从而驱使转向梯形机构实现左右前轮转向。
为了避免汽车转向时产生路面对汽车行驶的附加阻力和轮胎过快磨损,要求所有车轮在汽车转向时都作纯滚动。
因此,图2中,左右前轮转向角α和β应满足阿克曼转向几何学关系,cot cot B Lαβ=- (4) 其中,α---内侧车轮转角;β---外侧车轮转角;B---左右前轮转向主销轴线与地面交点之间的距离;L---汽车轴距;R---转向半径。
则可得理想的右轮转角()10tan tan 1tan B L αβα-⎡⎤=⎢⎥+⎣⎦ (5)故优化设计目标函数为 ()201/n i n δββ=⎡⎤=-⎢⎥⎣⎦∑(S 1≤S≤S 2) (6) 其中,δ——实际右轮转角β与理想右轮转向角β0之间均方根偏差;n ——取值次数。
可见,δ值越小,在各转角下,实际的右轮转角越接近于理想右轮转角,即优化结果越理想。
根据以上原理,利用“断开式转向梯形机构(齿条驱动)优化设计”程序,对转向机构部分的参数进行优化。
在优化时,选取不同的参数,看那些参数得到的数值最小。
2)利用优化软件进行设计"s","alfa","beta","beta0"-60,-30.5539676961854,-36.6153738886709,-39.94659 -58,-29.4985189836357,-35.0859635336518,-38.26963 -56,-28.4503872774486,-33.5927799735434,-36.61877 -54,-27.408907274291,-32.1331428577741,-34.99409 -52,-26.373451988192,-30.7046544205285,-33.3956 -50,-25.343428394435,-29.3051581210072,-31.82328 -48,-24.3182735895894,-27.9327047403287,-30.27701 -46,-23.29745138883,-26.5855243483829,-28.75664 -44,-22.2804492949929,-25.2620029383085,-27.26197 -42,-21.266775784546,-23.9606628069738,-25.79274 -40,-20.2559578643539,-22.6801459674757,-24.34864 -38,-19.2475388601996,-21.4192000350891,-22.92933 -36,-18.2410764038261,-20.1766661456902,-21.5344 -34,-17.2361405900202,-18.9514685555572,-20.16346 -32,-16.2323122791796,-17.7426056408015,-18.81602 -30,-15.2291815240433,-16.5491420686453,-17.4916 -28,-14.2263461019324,-15.3702019551138,-16.1897 -26,-13.2234101360599,-14.204962857185,-14.90977 -24,-12.2199827912811,-13.0526504741008,-13.65125 -22,-11.2156770311531,-11.9125339539082,-12.41358 -20,-10.2101084243783,-10.7839217185358,-11.19616 -18,-9.20289398968651,-9.66615773468722,-9.998395 -16,-8.19365106897065,-8.55861816924079,-8.819671 -14,-7.18199621907285,-7.46070837718453,-7.65937 -12,-6.16754411302882,-6.37186017781784,-6.516866 -10,-5.14990644183593,-5.29152938131033,-5.391527 -8,-4.12869080792177,-4.21919353299154,-4.282719 -6,-3.10349960145897,-3.15434984714126,-3.189803 -4,-2.07392885050059,-2.09651330571987,-2.112138 -2,-1.03956703559375,-1.04521490054644,-1.049083 0,0,0,02,1.04521490054644,1.03956703559375,1.0357694,2.09651330571987,2.07392885050059,2.0588626,3.15434984714126,3.10349960145897,3.0699278,4.21919353299154,4.12869080792177,4.06961410,5.29152938131033,5.14990644183593,5.058572 12,6.37186017781784,6.16754411302882,6.037457 14,7.46070837718453,7.18199621907285,7.006925 16,8.55861816924079,8.19365106897065,7.9676418,9.66615773468722,9.20289398968651,8.9202720,10.7839217185358,10.2101084243783,9.865492 22,11.9125339539082,11.2156770311531,10.8039924,13.0526504741008,12.2199827912811,11.73646 26,14.204962857185,13.2234101360599,12.66362 28,15.3702019551138,14.2263461019324,13.5862 30,16.5491420686453,15.2291815240433,14.50493 32,17.7426056408015,16.2323122791796,15.42059 34,18.9514685555572,17.2361405900202,16.33397 36,20.1766661456902,18.2410764038261,17.2459 38,21.4192000350891,19.2475388601996,18.15724 40,22.6801459674757,20.2559578643539,19.0689 42,23.9606628069738,21.266775784546,19.98181 44,25.2620029383085,22.2804492949929,20.89746,26.5855243483829,23.29745138883,21.8155348,27.9327047403287,24.3182735895894,22.73854 50,29.3051581210072,25.343428394435,23.66728 52,30.7046544205285,26.373451988192,24.60307 54,32.1331428577741,27.408907274291,25.54737 56,33.5927799735434,28.4503872774486,26.50179 58,35.0859635336518,29.4985189836357,27.46809 60,36.6153738886709,30.5539676961854,28.44822在软件界面中分别输入各参数,经优化选择机构优化结果列表(αmax为最大压力角)L 1L2L3y ααM αmaxβM(s=60mm)δ525 300 110 -25 180 36.6 48.8 30.55 1.41︒理论转向半径计算: R=L/sinβM=2200/sin30.55°=4328mm∈[4000,4500]mm 最大压力角αmax=48.8°∈[45°,50°]优化结果均满足题目要求。