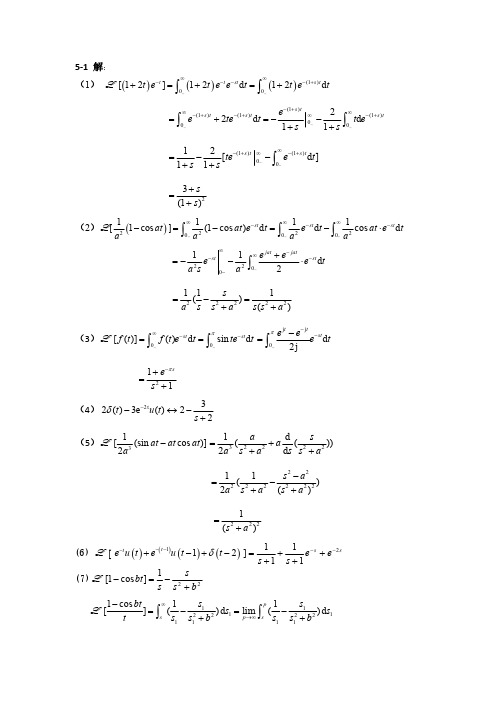
北邮_现代信号处理_第5章作业_答案
第5章 北邮信号与系统课后习题解答
1 s2
e s 1
(4)
2
(t)
3e 2 t u (t )
2
s
3
2
(5)L
[
1 2a
3
(sin
at
at
cos at)]
1 2a3
(s2
a
a2
a
d ds
( s2
s
a2
))
1 2a2
( s2
1 a2
s2 a2 (s2 a2)2
)
1 (s2 a2)2
1)]
e(s2) s2
其波形题 5-3 解图所示。
f1 (t ) 1
f2 (t) 1
t
1
t
f3 (t) e2
t
f4 (t)
e-2
1
t
5-4 解:
题 5-3 解图
(a)L [ f1(t)] L [E[u(t t1) u(t t1 )] E[u(t t2) u(t t2 )]]
1[ (s2
s 1)2
]
1 2
t
sin
t
由拉氏变换的积分性质
L
1[
(
s
2
2
1)2
]
t
sin d
sin t
t cos t
,t
0
0
或:
s
1 2
1
sin
t
,
(s2
2 1)2
sin t *sin t
sin t t cos t
信息与通信工程 北京邮电大学 数字信号处理 答案第5章_1
N 1 2
N2 1 1 N 1 N 1 n ( n) N 1 ) + h h( n )( z 2 =z +z 2 ∑ 2 n=0 频率响应: N2 1 1 N 1 ω j N 1 N 1 jω 2 n ω + h H (e ) = e h( n ) 2 cos ∑ 2 2 n=0
∑ h( n) sin(τω nω ) = 0
n=0
N 1
+ h(N - 2)sin [τω - (N - 2) ω ] + h(N - 1)sin [τω - (N - 1) ω ] = 0 {h(0)sin( τω )+ h(N - 1)sin [τω - (N - 1) ω ]} + { h(1)sin [τω - ω ] + h(N - 2)sin [τω - (N - 2) ω ] } + +{ h(n)sin [τω - n ω ] + h(N - 1 - n)sin [τω - (N - 1 - n) ω
π = 2 N 1 τ = 2 h( n ) = h( N 1 n )
h ( n ) 奇偶对称性 因此,有四种类型的 FIR DF: N 的奇偶数
16
线性相移FIR滤波器的频率响应(1)
有四种类型的 FIR DF: 一、偶对称 N为奇数(恒相时延、恒群时延〕 利用 h ( n ) = h[( N 1) n ]
5
1
1
FIR DF 频率响应
FIR数字滤波器的频率响应为:
H (e
jω
) =
∑
N 1 n=0
h ( nLeabharlann )ejω n= H( ω )e
jθ (ω )
H(ω):幅度函数,它是一个取值可正可负的实函数。 θ(ω) = arg [H(ejw)]为数字滤波器的相位函数。 FIR滤波器的最重要特点是能实现线性相位。 具有线性相移特性的FIR滤波器是FIR滤波器 中应用最广泛的一种。
现代信号处理ch5-2
Fourier分析局限性及解决办法
不相容原理(测不准原理)
窗函数与局域平稳长度间的关系告诉我们,时频分析 适合局域平稳长度比较大的非平稳信号;如局域平稳长度 很小,则时频分析的效果较差。这一点在进行时频信号分 析时是必须注意的。
7
Fourier分析局限性及解决办法
短时Fourier变换
为了获得各分量的瞬时频率,一种直观的方法是引入“局 部频谱”的概念:使用一个很窄的窗函数取出信号,并求 其Fourier变换。由于这一频谱是信号在窗函数一个窄区 间内的频谱,剔除了窗函数以外的信号频谱,故称其为信 号的局部频谱是合适的。使用窄窗函数的Fourier变换习 惯称为短时Fourier变换。 含义 - 把STFT看作是加窗付氏变换;在时刻t, 计算其“所有频率”分量
2
2
不相容原理也称测不准原理。式中的 t 和 w分别称为时间分 辨率和频率分辨率。时间分辨率和频率分辨率分别是信号在两 个时间点和两个频率点之间的区分能力。不相容原理表明,时 宽和带宽(即时间分辨率和频率分辨率)是一对矛盾的量,我 们不可能同时得到任意高的时间分辨率和频率分辨率。
Fourier分析局限性及解决办法
4
Fourier分析局限性及解决办法
不相容原理(测不准原理)
为研究信号的局部特性,即对信号加窗后再进行变换,如 短时傅立叶变换(STFT) 、小波变换、Gabor变换 。 定义: Gx(f, t) = F{x(τ)g(τ-t)} 作用: 将一维信号x(t)映射为时-频平面(t,f)的二维函数。 不相容原理: 对于有限能量的任意信号s(t)或窗函数h(t),其时宽和频宽的 乘积总是满足下面的不等式: 1 时宽-带宽乘积= Ts Bs ts ws 或 Th Bh th wh 1 。
现代通信原理 第5章 课后习题及答案
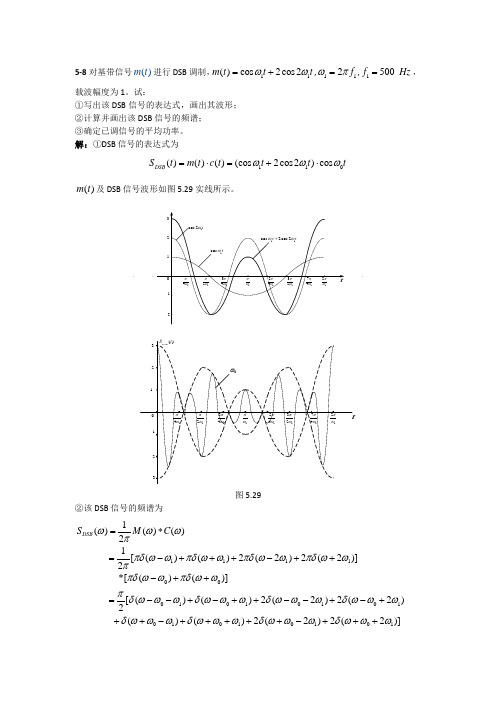
5-8对基带信号()m t 进行DSB 调制,11()cos 2cos2m t t t ωω=+,112f ωπ=,1500f Hz = ,载波幅度为1。
试:①写出该DSB 信号的表达式,画出其波形; ②计算并画出该DSB 信号的频谱; ③确定已调信号的平均功率。
解:①DSB 信号的表达式为110()()()(cos 2cos2)cos DSB S t m t c t t t t ωωω=⋅=+⋅()m t 及DSB 信号波形如图5.29实线所示。
图5.29②该DSB 信号的频谱为111100*********()()()21[()()2(2)2(2)]2*[()()][()()2(2)2(2)2(DSB S M C ωωωππδωωπδωωπδωωπδωωππδωωπδωωπδωωωδωωωδωωωδωωωδωω=∗ =−+++−++ −++ =−−+−++−−+−+ ++01010101)()2(2)2(2)]ωδωωωδωωωδωωω−+++++−+++频谱图如图5.30所示图5.30③已调信号的平均功率为221122111111111()21(cos 2cos 2)2cos 4cos cos 24cos 2(1cos 2)2(cos3cos )2(1cos 4)12.5 1.252DSB fBP P m t t t t t t tt t t t Wωωωωωωωωωω===+ ++ +++++ ==××1=211= 22 5-9 设SSB 发射机被一正弦信号()m t 调制,1()5cos m t t ω=,112f ωπ=,1500f Hz = ,载波幅度为1。
试:①计算()m t 的希尔伯特变换ˆ()mt ; ②确定下边带SSB 信号的表达式; ③确定SSB 信号的均方根(rms )值; ④确定SSB 信号的峰值; ⑤确定SSB 信号的平均功率。
解:①1()5cos m t t ω=,其傅里叶变换为11()5[()()]M ωπδωωδωω=−++其希尔伯特变换的频谱为ˆ()sg n ()()Mj M j ωωωπδωωδωω11=−⋅ =5[(+)−(−)]因此,m(t)的希尔伯特变换为1ˆ()[()]5sin m t m t t ω==H②下边带SSB 信号的表达式为00101001ˆ()()co s ()sin 5cos cos 5sin sin 5cos[()]SSB S t m t t m t t t t t t t ωωωωωωωω=+ =⋅+⋅ =− ③以下边带SSB 信号为例,有SSB rms = ==④由下边带SSB 信号表达式可知,信号峰值为 max ()|5SSB S t =⑤SSB 信号平均功率为 225()12.52SSBSSB P S t W === 5-17已知幅度调制信号()AM S t 的总功率为200kW ,调制信号()f t 的最高频率 5 m f kHz =,载波频率810 o f kHz =,边带功率为40kW ,信道中噪声的双边功率谱密度,系统采用包络检波解调。
数字信号处理作业 第五章 参考答案

(1) 由极点构成 H a ( s ) 的分母多项式,分子为分母多项式的常数。 (2) H a ( s ) 展成部分分式。 (3) 据有理分式变换得到对应的 H ( z ) 各分式,整理得到最后的 H ( z ) 。 22、 取 T=1, 预畸, 由已知列出对模拟滤波器的衰减要求, 解出 N=6.04, 取 N=7, 得到
−0.5
Z −1
−1
0.9
−0.81
4、 H ( z ) = −4.9383 +
2.1572 4.7811 − 1.5959 z −1 + 1 + 0.5 z −1 1 − 0.9 z −1 + 0.81z −2
−4.9383
x ( n) y ( n)
2.1572 −0.5
Z −1
4.7811
Z
0.9 −0.81
= H 2 ( z)
α 02 + α12 z -1 -3.1986 + 0.2591z -1 = 1 +z 2 1 + 1.618 z - 4π 2 2 1 + r z 1 - 2rz -cos 5
频率取样型实现流程图:
−10.125
Z −1
18.3236
x ( n)
Z −1
x ( n)
Z −1
Z −1
+
Z −1
− 7 4
+
Z −1
− 69 8
+
y ( n) 4) 频率取样型:取 r=1,N=5,得到 DFT{h(n)}为:
{-10.1250 9.1618 + 6.6564i -1.5993 - 4.9221i -1.5993 + 4.9221i 9.1618 - 6.6564i}
北京邮电大学数字信号处理习题答案第5章18页word
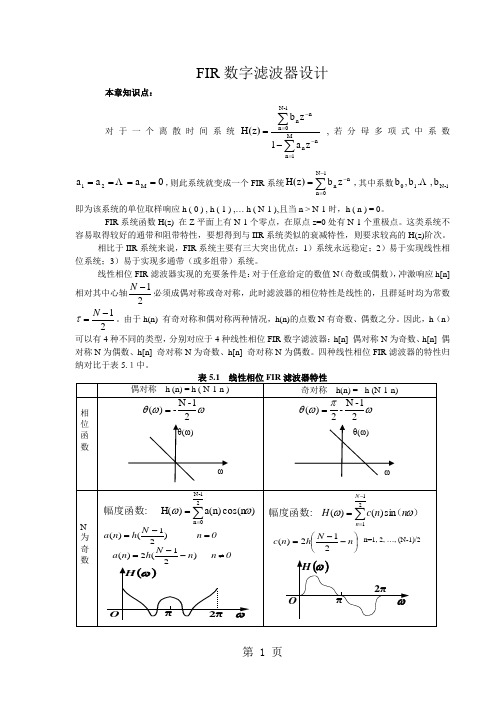
FIR 数字滤波器设计本章知识点:对于一个离散时间系统∑∑=-=--=M 1n nn 1-N 0n nnz a 1z bz H )(,若分母多项式中系数0a a a M 21====Λ,则此系统就变成一个FIR 系统∑-=-=1N 0n nn z b z H )(,其中系数1-N 10b ,.b ,b Λ即为该系统的单位取样响应h ( 0 ) , h ( 1 ) ,… h ( N-1 ),且当n > N-1时,h ( n ) = 0。
FIR 系统函数H(z) 在Z 平面上有N-1个零点,在原点z=0处有N-1个重极点。
这类系统不容易取得较好的通带和阻带特性,要想得到与IIR 系统类似的衰减特性,则要求较高的H(z)阶次。
相比于IIR 系统来说,FIR 系统主要有三大突出优点:1)系统永远稳定;2)易于实现线性相位系统;3)易于实现多通带(或多组带)系统。
线性相位FIR 滤波器实现的充要条件是:对于任意给定的数值N (奇数或偶数),冲激响应h[n] 相对其中心轴21-N 必须成偶对称或奇对称,此时滤波器的相位特性是线性的,且群延时均为常数 21-=N τ。
由于h(n) 有奇对称和偶对称两种情况,h(n)的点数N 有奇数、偶数之分。
因此,h (n )可以有4种不同的类型,分别对应于4种线性相位FIR 数字滤波器:h[n] 偶对称N 为奇数、h[n] 偶对称N 为偶数、h[n] 奇对称N 为奇数、h[n] 奇对称N 为偶数。
四种线性相位FIR 滤波器的特性归纳对比于表5.1中。
一.FIR DF 设计方法FIR DF 的设计实现不能像IIR DF 设计那样借助于模拟滤波器的设计方法来实现,其设计方法主要是建立在对理想滤波器频率特性进行不同程度逼近的基础上,主要的逼近方法有三种:窗函数法;频率抽样法;最佳一致逼近法。
1. 窗函数法窗函数法是设计FIR 滤波器的最直接方法,它通过采用不同时宽的窗函数,对理想滤波器的无限长冲激响应h d (n)进行截短,从而得到系统的有限长冲激响应 h (n),这一过程可用式5-1来描述:,021-N ||,(n)h )()()(d ⎪⎩⎪⎨⎧≤=其它= n n w n h n h R d (5.1)其中W R (n)是时宽为N 的窗函数。
北京邮电大学数字信号处理习题答案第5章
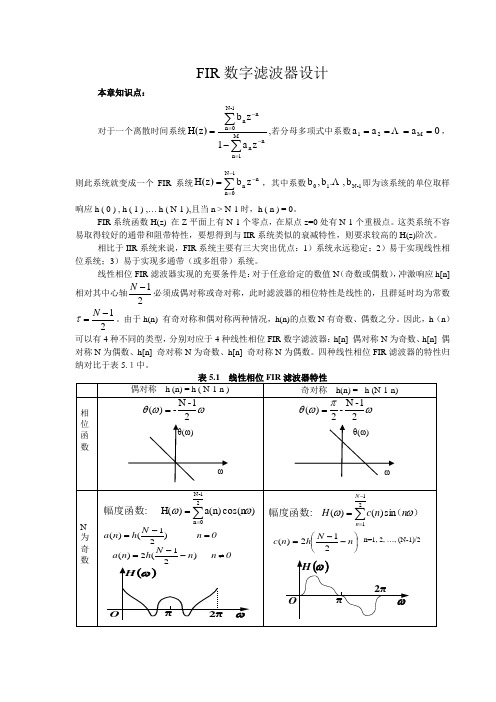
FIR 数字滤波器设计本章知识点:对于一个离散时间系统∑∑=-=--=M 1n nn 1-N 0n nnz a 1z bz H )(,若分母多项式中系数0a a a M 21==== ,则此系统就变成一个FIR 系统∑-=-=1N 0n n nz bz H )(,其中系数1-N 10b ,.b ,b 即为该系统的单位取样响应h ( 0 ) , h ( 1 ) ,… h ( N-1 ),且当n > N-1时,h ( n ) = 0。
FIR 系统函数H(z) 在Z 平面上有N-1个零点,在原点z=0处有N-1个重极点。
这类系统不容易取得较好的通带和阻带特性,要想得到与IIR 系统类似的衰减特性,则要求较高的H(z)阶次。
相比于IIR 系统来说,FIR 系统主要有三大突出优点:1)系统永远稳定;2)易于实现线性相位系统;3)易于实现多通带(或多组带)系统。
线性相位FIR 滤波器实现的充要条件是:对于任意给定的数值N (奇数或偶数),冲激响应h[n] 相对其中心轴21-N 必须成偶对称或奇对称,此时滤波器的相位特性是线性的,且群延时均为常数 21-=N τ。
由于h(n) 有奇对称和偶对称两种情况,h(n)的点数N 有奇数、偶数之分。
因此,h (n )可以有4种不同的类型,分别对应于4种线性相位FIR 数字滤波器:h[n] 偶对称N 为奇数、h[n] 偶对称N 为偶数、h[n] 奇对称N 为奇数、h[n] 奇对称N 为偶数。
四种线性相位FIR 滤波器的特性归纳对比于表5.1中。
一.FIR DF 设计方法FIR DF 的设计实现不能像IIR DF 设计那样借助于模拟滤波器的设计方法来实现,其设计方法主要是建立在对理想滤波器频率特性进行不同程度逼近的基础上,主要的逼近方法有三种:窗函数法;频率抽样法;最佳一致逼近法。
1. 窗函数法窗函数法是设计FIR 滤波器的最直接方法,它通过采用不同时宽的窗函数,对理想滤波器的无限长冲激响应h d (n)进行截短,从而得到系统的有限长冲激响应 h (n),这一过程可用式5-1来描述:,021-N ||,(n)h )()()(d ⎪⎩⎪⎨⎧≤=其它= nn w n h n h R d (5.1)其中W R (n)是时宽为N 的窗函数。
现代信号处理思考题(含答案)
第一章 绪论1、 试举例说明信号与信息这两个概念的区别与联系。
信息反映了一个物理系统的状态或特性,是自然界、人类社会和人类思维活动中普遍存在的物质和事物的属性。
信号是传载信息的物理量是信息的表现形式,如文字、语言、图像等。
如人们常用qq 聊天,即是用文字形式的信号将所要表达的信息传递给别人。
2、 什么是信号的正交分解?如何理解正交分解在机械故障诊断中的重要价值?P9正交函数的定义信号的正交分解如傅里叶变换、小波分解等,即将信号分解成多个独立的相互正交的信号的叠加。
从而将信号独立的分解到不同空间中去,通常指滤波器频域内正交以便于故障分析和故障特征的提取。
傅里叶变换将信号分解成各个正交的傅里叶级数,将信号从时域转换到频域从而得到信号中的各个信号的频率。
正交小波变换能够将任意信号(平稳或非平稳)分解到各自独立的频带中;正交性保证了这些独立频带中状态信息无冗余、无疏漏,排除了干扰,浓缩了了动态分析与监测诊断的信息。
3、 为什么要从内积变换的角度来认识常见的几种信号处理方法?如何选择合适的信号处理方法?在信号处理各种运算中内积变换发挥了重要作用。
内积变换可视为信号与基函数关系紧密程度或相似性的一种度量。
对于平稳信号,是利用傅里叶变换将信号从时域变为频域函数实现的方式是信号函数x (t )与基函数i t e ω 通过内积运算。
匹配出信号x (t )中圆频率为w 的正弦波.而非平稳信号一般会用快速傅里叶变换、离散小波变换、连续小波变换等这些小波变换的内积变换内积运算旨在探求信号x (t )中包含与小波基函数最相关或最相似的分量。
“特征波形基函数信号分解”旨在灵活运用小波基函数 去更好地处理信号、提取故障特征。
用特定的基函数分解信号是为了获得具有不同物理意义的分类信息。
不同类型的机械故障会在动态信号中反应出不同的特征波形,如旋转机械失衡振动的波形与正弦波形有关,内燃机爆燃振动波形是具有钟形包络的高频波;齿轮轴承等机械零部件出现剥落。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
现代信号处理第五章作业
学院: 学号: 序号: 姓名:
5.6 设有一个随机信号x (n )服从AR(4)过程,它是一个宽带过程,参数如下:
212341.352,+1.338,0.662,0.240,1w a a a a σ=-==-==
我们通过观察方程)()()(n v n x n y +=来测量该信号,v (n )是方差为1的高斯白噪声,要求利用Weiner 滤波器从测量信号y (n )中估计x (n ),用MATLAB 对此进行仿真。
解 一个随机信号x (n )服从AR(4)过程,且滤波器系数为:a=[1 -1.352 1.338 -0.662 0.240]; 则可以由白噪声通过一个AR4阶的滤波器生成信号序列x(n),然后x(n)再加上方差为1的高斯白噪声v (n )得到y(n)=x(n)+v(n),然后分别通过LMS 算法对y(n)滤波得出x(n)的估计值。
如下方框图:
clear all;
close all;
wv=randn(150,1);
%AR 系统系数
a=[1 -1.352 1.338 -0.662 0.240];
%由白噪声通过一个AR4阶的滤波器生成信号序列x(n)
x=filter(1,a,wv);
k1=length(x)
y=x+randn(1,k1)';
%-------学习步长固定为C=0.015----------
mu=0.015%学习步长
%system order=10
k=10;
w=zeros(1,k)%权系数设抽头数为10
N=150;%节点训练序列
error=zeros(1,N);
for i=k:N
u=y(i:-1:i -k+1);
z(i)=w*u;
e=y(i)-w*u;
w=w+(mu*e)*u';
error(i)=error(i)+e.^2;%误差累积
end;
t=1:150;
figure(3)
plot(t,x(t));
hold on
plot(t,z(t),'r-');
xlabel('n');
ylabel('期望和通过LMS算法所得的估计');
figure(4)
plot(error);
legend('LMS算法1次实验误差平方的均值曲线'); hold on;。