益智循迹机械小车说明书
智能循迹车使用说明书

智能循迹车使用说明书
1.循迹板实物图
说明:循迹板共有5个探头(Q1~Q5),分别对应的输出端为OUT Q1~Q5。
工作原理:发射头发射红外线,当地面没有黑线时,红外线被反射回来,接收头接收
到后接收端导通,导通则T1接地=0;反向端大于同向端, 则OUT 端输出低电平为低1给单片机识别,单片机通过扫描引脚来判断黑线状态。
同理,当黑线将红外线吸收时,那么OUT 端输出高电平1给单片机。
在输出端接有工作指示灯,当第电平时,指示灯亮.
2.循迹板电路图
3.循迹探头说明书
4.循迹算法分析
T1
A . B. C.
A.一个探头检测到信号
B.侧边一个探头检测到信号
C.两个探头同时检测到信号
5.电机驱动
电机驱动结构简图
电机驱动分析:这是一个H 桥电路,当LA 点位低电平时,Q3,Q2截止,Q7,Q1导通,电机左端呈高电平;当LB 点位高电平时,Q8,Q2截止,Q6,Q5导通,电机左端呈高电平;因此,在LA 为0,LB 为1时,电动机正转,反之,电动机反转。
如果LA,LB 同为高电平或低电平时,电机停止转动。
LA
LB。
光电循迹小车使用手册

光电循迹小车使用手册1. 仿真软件介绍在做实物之前,可以用仿真软件plastid进行在线仿真。
这样不仅可以加快设计进度,同时可以减少实际电路的调试,减少出错,节约成本。
Plastid是为“飞思卡尔”杯全国大学生智能车邀请赛开发的智能车仿真系统,不仅可以针对不同的赛车,赛道,路径识别方案,控制策略等内容进行仿真和相关分析,还增添了许多新的功能,使仿真系统更接近于实际情况,为使用者提供更好,更真实的虚拟仿真平台。
Plastid主要有以下几大特点:1.赛道与赛车环境模拟系统分别针对赛道与赛车建立模型,使用者可以方便的自行设计直线,弯道等各种形状的赛道,并可根据赛车的实际情况调整赛车的参数,使用方便灵活。
在条件限制,没有办法制作试验赛道或智能车尚未制作完成的情况下,更可以在该系统下验证,调试控制算法。
2.控制算法仿真验证系统采用纯软件仿真形式,通过将控制程序编写成dll文件,系统调用dll文件来实现仿真。
Dll的编写可以使用VC6,VC2005,Delphi7,Delphi2006.使用者可以根据自身情况,选择最适合自己的编程环境来编写程序。
验证调试后的算法代码,也可以很方便的移植到单片机中。
3.路径识别方案分析系统提供了广泛使用的光电传感器和CCD传感器模型,使用者可以自行设计传感器的数量及排列方式,位置,在系统中进行仿真,通过分析比较,从而获得优化方案。
很多程度上解决了实地试验中更换传感器麻烦,费时的问题。
从而极大提高方案分析效率。
图1.1 程序主界面在此界面中,用户可以在菜单工具栏中的“文件”、“工具”、“帮助”等菜单进行操作;同时,也可以操作菜单工具栏下方的选项:“赛道设计”、“赛车设计”、“仿真模拟”、“结果回放”,进入相应的操作子界面进行进一步的操作。
赛道设计:在赛道设计子界面中,可以进行赛道的设计操作,如新建及修改赛道、赛道基本参数设定等。
赛车设计:在赛车设计子界面中,用户建立自己的小车模型,并根据自己小车的实际情况对相关参数进行设置。
第10课 机器人卫士(循迹小车)

2020浙摄版六年级下册
本单元思维导图
01
任务目标
任务目标
任务一:了解任务目标
1、登录萝卜圈 2、进入新手入门-循迹踢球-任务说明 3、了解任务
任务目标
任务目标
要求机器人沿轨 迹线行走,直到碰 到终点的足球。
02
任务分析
ห้องสมุดไป่ตู้
任务分析
任务分析
动作
分析
进一步分析
左转 右转 直行
实践活动 任务三:用程序完成任务
你学会了什么?
左侧碰到线 左侧碰到线 两侧都不碰到线
左边测到黑色 右边测到白色
左边测到白色 右边测到黑色
左边测到白色 右边测到白色
任务分析 任务一:用流程图描述方案 循环
03
实践活动
实践活动 任务二:查看灰度值
左轮碰到黑线
实践活动 任务二:查看灰度值
白线
黑线
实践活动 任务三:用程序完成任务
左轮碰到黑线
实践活动 任务三:用程序完成任务
循迹小车的组装说明(压缩)
循迹小车车身的组装
(注意连接扣、底板连接放置的位置)
万向轮的组装
(注意连接扣的长度连杆与万向轮支架连接的方向)
小车驱动电机的组装
(注意电机安装的位置)
车轮组件的组装
万向轮的装配
传感器固定装置的组装
(注意连接口、之型连杆连接的方向)
小车行走探测传感器的组装
循迹小车全观图
(电源部分与控制电路板组装未说明详见公司网站说明)
硬件连接示意图
循迹小车程序截图
循迹右电机分别连接在 主板所示的两个端口。 前进探测传感器左右传感器分别接在输入 口0、1口。 打开ZB2软件,打开所给程序资料,下载 到主板运行,若小车不能走黑线调整传感 器、电机的连接口。
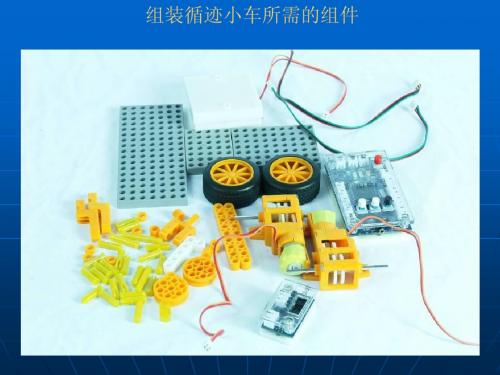
智能循迹避障小车设计说明
智能循迹避障小车设计说明智能循迹避障小车是一种基于微控制器控制的智能小车,它能够根据预设程序进行自主行驶、循迹和避障。
下面是对智能循迹避障小车的设计说明:1.硬件设计智能循迹避障小车的硬件设计包括以下组成部分:1.1 微控制器:使用单片机实现小车的控制和决策,采用常见的单片机有STC、ATmega、STM32等。
1.2 传感器:使用光电传感器进行循迹,超声波传感器进行避障。
在循迹方面,一般采用两个光电传感器,安装在小车底部,分别检测黑线和白色地面;在避障方面,一般采用超声波传感器,安装在小车前方,检测前方物体距离。
1.3 驱动电机:小车驱动电机一般采用直流减速电机,通过H桥驱动电路实现正反转控制。
1.4 电源:小车电源采用锂电池或干电池供电。
1.5 其他:小车还需要一些辅助元件,如LED指示灯、蜂鸣器等。
2.软件设计智能循迹避障小车的软件设计包括以下几个方面:2.1 循迹算法:根据光电传感器检测到的黑线和白色地面的信号,判断小车当前位置,控制小车朝着黑线方向运动。
2.2 避障算法:根据超声波传感器检测到的前方距离信息,判断小车前方是否有障碍物,避免碰撞。
2.3 控制逻辑:根据传感器数据计算得出的小车状态,进行控制决策。
比如,避障优先还是循迹优先,小车如何避障等。
2.4 通信协议:如果需要远程控制或传输数据,需要设计相应的通信协议。
3.功能实现基于硬件和软件设计,实现智能循迹避障小车以下功能:3.1 循迹:小车能够自主行驶,按照预设的循迹算法进行路径规划和执行。
3.2 避障:小车能够根据预设的避障算法,自主避开前方障碍物,避免碰撞。
3.3 情境感知:小车能够通过传感器感知环境,根据感知到的信息做出相应的控制决策。
3.4 远程控制:如果需要,可以通过通信模块实现小车的远程控制和数据传输。
智能循迹小车说明书

本科毕业设计说明书题目:智能循迹小车院(部):机电工程学院专业:班级:姓名:学号:指导教师:完成日期:摘要 (2)ABSTRACT (4)1.绪论........................................................................................................................... - 1 - 1.1智能小车的作用和意义 ........................................................................................ - 1 -1.2智能小车的现状...................................................................................................... - 2 -2.方案设计与论证 ................................................................................................... - 3 - 2.1循迹模块 ................................................................................................................... - 3 - 2.2主控系统 ................................................................................................................... - 4 - 2.3电机驱动模块 .......................................................................................................... - 5 - 2.4机械系统 ................................................................................................................... - 7 -2.5电源系统 ................................................................................................................... - 7 -3.硬件设计................................................................................................................... - 8 - 3.1信号检测模块 .......................................................................................................... - 8 - 3.2主控电路 ................................................................................................................... - 8 - 3.3驱动电路 ................................................................................................................. - 11 -3.4总体设计 ................................................................................................................. - 11 -4.软件设计................................................................................................................. - 13 - 4.1总体结构框图 ........................................................................................................ - 13 - 4.2总体程序流程图.................................................................................................... - 14 - 4.3总程序...................................................................................................................... - 14 -4.4软件仿真 ................................................................................................................. - 38 -5.安装和调试............................................................................................................ - 40 - 结束语............................................................................................................................ - 42 - 致谢 .............................................................................................................................. - 43 - 参考文献 ...................................................................................................................... - 44 -本设计主要有三个模块包括信号检测模块、主控模块、电机驱动模块。
循迹小车作品说明书

循迹小车作品说明书(总11页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--目录1 电路设计 ............................................................................................................ 错误!未定义书签。
总体方框图............................................................................................... 错误!未定义书签。
工作原理 ................................................................................................... 错误!未定义书签。
2 各主要电路及部件工作原理........................................................................ 错误!未定义书签。
三路循迹电路简要说明........................................................................ 错误!未定义书签。
电压比较电路简要说明........................................................................ 错误!未定义书签。
电机驱动电路简要说明........................................................................ 错误!未定义书签。
复位电路简要说明................................................................................. 错误!未定义书签。
D2-1小车说明书

1.2 原理图(见右侧)
1.3 电路装配 1、 按电路图和电路板上的标识依次将色环电阻、8 脚 IC、开关、电位器、三
极管、电解电容、发光二极管焊接在电路板上,注意 IC 座的方向和要焊错。LED
长脚为正极,另外调试方便,芯片暂时不安装。
2、 将电池盒按照电路板上的穿线孔和标识符的位置安装在电路板上,注意电
规格 KC-2
/ / / M3
数量 2 2 2 2 6
M3*8 2
M3*30 4
M5
1
M5*27 1
M5
1
AA*2 1
白色
2
D2-1 1
A4
1
/1
源焊盘的极性不要焊接反,通常红色导线是电源正极。
3、 将电路板正面向上,万向轮螺丝穿入孔中,并旋入万向轮螺母和万向轮,
拧紧。
4、将电路板正面向上,接板子上标示符将两个透明发红光的发光二极管和光敏电阻
焊接在板子上,要求发光二极管和光敏电阻距离万向轮球面 3CM 左右即可。
5、在电池盒内装入 2 节 AA 电池,按下开关打开电源,此时红色不透时 LED、传 感器的 2 个透明 LED 均点亮,如果不发光,您可能将 LED 正负极焊反,这时请将极 性对调,直到点亮。再按下开关关闭电源待用。
演示视频 2013-12-8
D2-1 非编程模拟寻迹小车说明书
感谢您购买 D2-1 非编程模拟寻迹小车。这款套件使您初步了解自动控制的
原理和技术。我们希望您能在这款产品中学到有用的知识和技能,并为以后深入
的学习打下良好基础。在使用本产品时请按说明书中要求进行装配,以便正确的
使用产品。
1.1 清单表(见下文)
1.4 机械部件装配 1、 将硅胶轮胎套在车轮上。 2、 将车轮用压花轴固定在减速电机轴上。 3、 将连接导线分成 4 截后上锡,分别焊在 2 台电机上待用。 4、 用长螺丝把两片白色小板与电机拧在一起,注意区分安装方向,方向将电机固定 在小车电路板上。 5、 将与电机拧在一起的小板卡在电路板上的开槽中并上锡焊接牢固,同时按标识将 电机上的引线焊接在电机板上。 1.6 整车调试 1、测试驱动电路,将 8 脚 IC 座的第 1 脚、第 7 脚、第 4 脚接一起。打开电源开关, 这时电机应当向前方转动,否则调换相应电机的引线位置即可。如果电机不转请检查 三极管是否焊反,基极电阻(10 欧)是否正确。2、断电后将 LM393 芯片插件 8 脚 IC 座上,上电后调节相应的电位器使用小车能在黑线上正常行走且不会跑出黑线的范 围。说明书附测试跑道,也可以向经销商索取电子版,或都使用 1.5CM 到 2.0CM 宽黑 胶带、绝缘带等当作跑道作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
--线2012国家级大学生创新创业计划益智循迹机械小车设计说明书设计:指导老师:二〇一三年六月摘要本设计以机械能为动力源,设计开发一种可以按一定轨迹行进的机械小车,通过机械装置的调整与操作可直观的展示机械能量转化、能量守恒、机械传动原理的奥秘,开发智力,培养其对机械设计的兴趣。
根据益智循迹机械小车基本功能,将其分为能量转换机构、传动机构、转向机构、微调机构四个模块进行设计开发。
能量转换机构采用了发条、绕线轮的结构组成,将弹簧的弹性势能转化为动能驱动小车运动;传动机构采用了直齿圆柱齿轮传动,并基于齿面接触疲劳强度、齿根弯曲疲劳强度对齿轮的有关参数设计,同时为了降低成本,在设计的过程中,利用UG软件对齿轮进行了运动仿真;转向机构是小车设计的核心,采用齿轮+凸轮的传动方案控制小车转向,完成避障行走;微调机构采用螺母、丝杠的微调方案弥补零件加工、装配的误差,从而使益智循迹机械小车达到按照预定的轨迹避障行走、找到最佳起跑点的目的使用者通过观察样机的工作原理,并亲手调试,改变小车的可调变量,观察其行走规律,从而以游戏的形式锻炼了操作者的动手能力,使人们获得身心健康,增强自身的逻辑分析能力,和思维敏捷性。
而且娱乐性也十分强。
关键字:益智微调机构转向机构传动机构线线AbstractThe design of the mechanical energy as a power source, mechanical design and development of a car can travel in a certain path, through the adjustment and operation of mechanical device can directly display the mechanical energy conversion, energy conservation, mechanical transmission principle of mystery, intellectual development, cultivate interest on its mechanical design.According to the basic function of educational tracking machinery trolley, which is divided into the energy conversion mechanism, transmission mechanism, turn to the four module mechanism, adjustment mechanism for design and development. The energy conversion mechanism adopts winding, the winding wheel structure, the elastic potential energy of the spring is converted to kinetic energy driving car movement; the drive mechanism adopts gear transmission, and based on the tooth surface contact fatigue strength, the parameter design of tooth root bending fatigue strength of gear, at the same time in order to reduce the cost, in the process of the design, to gear are simulated by using UG software; the steering mechanism is the core of car design, the transmission gear and cam control car steering, complete avoidance walking; adjustment mechanism by trimming nut, screw up program error parts processing, assembly, so that the puzzle tracking machinery trolley achieve according to a predetermined trajectory obstacle avoidance walking, find the best starting point for the purpose ofThe user through the working principle of the prototype, and personally debugging, change car adjustable variables, observe its walking rules, so as to the game in the form of exercise the ability, causes the people to obtain the physical and mental health, enhance their ability of logical analysis, and thinking agility. And the entertainment is also very strong.Keywords:Alpinia oxyphylla Fine tuning mechanism steering gear transimission gear线目录第一章绪论 (1)1.1 “S”型路线益智循迹机械小车设计的目的及意义 (1)1.2 益智循迹机械小车的设计思路 (1)第二章益智循迹机械小车的方案设计阶段 (2)2.1总体方案分析 (2)2.2车架设计理念 (3)2.3动力部分 (4)2.4机械传动机构 (4)2.5转向机构的方案分析 (4)2.6差速机构的设计 (5)2.7 微调机构 (5)第三章益智循迹机械小车的技术设计 (7)3.1 能量耗散分析模型 (7)3.2 小车驱动及转向原理分析 (8)3.3 计算小车的传动比 (9)3.4 小车行走路程估算 (11)3.5 齿轮的设计与强度校核 (11)3.5.1第一对齿轮的分析设计 (11)3.5.2第二对齿轮的分析设计 (17)3.6 凸轮的设计计算 (17)3.7 轴的强度校核 (24)3.7.1 驱动轴的强度校核 (24)3.7.2 后轮轴的强度校核 (28)第四章益智循迹机械小车主要零件的加工 (34)4.1 小车的底板设计及加工 (34)4.2 车轮的设计与加工 (39)4.3 轴承支座的设计加工 (44)4.4 齿轮的加工 (45)第五章益智循迹机械小车的整体设计 (48)5.1 小车样机展示 (48)5.2 小车制作调试及改进 (48)5.3 分析讨论小车如何实现变桩距的避障行走 (50)5.4 小车优缺点 (50)致谢词 (51)参考文献: (52)线第一章绪论1.1 “S”型路线益智循迹机械小车设计的目的及意义本设计以机械能为动力源,设计开发一种可以按一定轨迹行进的机械小车,通过机械装置的调整与操作可直观的展示机械能量转化、能量守恒、机械传动原理的奥秘,开发智力,培养其对机械设计的兴趣。
使用者通过观察样机的工作原理,并亲手调试,改变小车的可调变量,观察其行走规律,从而以游戏的形式锻炼了操作者的动手能力,使人们获得身心健康,增强自身的逻辑分析能力,和思维敏捷性。
而且娱乐性也十分强。
1.2 益智循迹机械小车的设计思路根据益智小车的要求,小车的基本结构为:三轮结构(后轮驱动,前轮导向),平板底盘(主体架构),发条通过拉线带动传动轴,传动轴通过传动机构带动后轮转动,并通过一定的机构带动前轮转动,通过导向机构实现前轮转向,并考虑一个微调结构,进行运动轨迹的调整。
本设计坚持了“整车重心低;结构简单;传动件数少;质量小;足够的刚度;振动小;操作、调整方便灵活”的原则。
在设计方法上借鉴了优化设计、系统设计等现代设计理论方法。
采用MATLAB、UG等软件辅助设计。
通过直观的模型对小车进行仔细深入的结构分析,得到可行的方案。
小车的设计过程采用的基本步骤如下图1.1。
图1.1 益智循迹机械小车设计基本步骤线第二章益智循迹机械小车的方案设计阶段2.1总体方案分析对命题进行分析,小车需要完成发条的弹性势能转换成动能、驱动小车行走、转向机构控制小车转向,在行走的过程中自行避开障碍物,实现越障功能。
为达到调试方便的目的、以尽可能少的投入生产出和理论设计尽可能相符合的产品,将小车划分为六个部分进行模块化设计(车架、原动机构、传动机构、转向机构、行走机构、微调机构)。
图2.1 益智循迹机械小车的设计方案根据提出的方案,在满足性能要求的同时,也要考虑加工、制造成本等各方面因素,权衡利弊。
首先小车要保证设计的结构能完成避障行走的性能,行走轨迹差之毫厘谬以千里,所以对方案的要选择可调的方案,便于对轨迹进行修正。
为了是小车在有限的重力势能的作用下行走最远,这就要求小车要具有很小的质量。
为此,选用较轻的材料作为小车的主题材料。
图2.2 提高益智循迹机械小车的运动性能示意图线图2.3 提高益智循迹机械小车的工艺性能示意图2.2车架设计理念由于车子整体较轻,所以车架受力不大,为尽量减轻小车重量,采用铝合金板材加工。
车架是益智循迹机械小车其他零件的定位基准,车架精度的高低直接决定小车性能的好坏。
采用铝合金板材便于机械加工(本设计的底板采用线切割加工)、重量轻。
在保证其加工精度的同时也减轻了其重量。
线2.3动力部分为了将发条的弹性势能转化为小车的驱动力需要能量转换机构。
本设计的方案是用绳子和线轮来完成该功能。
能量转换机构需要满足一下基本要求:1)驱动力的大小要合适,不能太大。
行走速度不能很高,防止小车转弯时速度过高倾翻;防止小车在换向的过程中行走路线偏离预定轨迹,导致其绕桩失败。
2)不同的跑道对轮子的摩擦不一样,要求车子具有很强的适应场地的能力,所以要能根据场地来及时调整其驱动力的大小。
2.4机械传动机构益智循迹机械小车机械传动机构要能将发条提供的弹性势能加以改变,把动力和运动传递到转向机构和驱动轮上。
为了使小车行驶的更远及按预定的轨道精确地进行避障行走,传动机构必需具备传递效率高、传动稳定、结构简单重量轻等特点。